基于DDS 協(xié)議的離岸船舶實(shí)時(shí)定位方法
2023-06-15 01:00:10張罡
艦船科學(xué)技術(shù) 2023年10期
張罡
(武漢船舶職業(yè)技術(shù)學(xué)院,湖北 武漢 430050)
0 引言
離岸船舶安全航行的前提之一是依據(jù)自身的實(shí)時(shí)位置,制定路徑規(guī)劃方案,并在航行過程中,依據(jù)實(shí)時(shí)位置、航行速度等信息,持續(xù)調(diào)整航行偏差,確保船舶安全抵達(dá)目的地[1?3]。
張嘯塵等[4]利用YOLOv3 算法提取船舶特征,通過SURF 算法匹配提取的特征,實(shí)現(xiàn)船舶的測(cè)距和定位。楊浩琪等[5]在卷積神經(jīng)網(wǎng)絡(luò)內(nèi),引入注意力機(jī)制,提升特征提取精度,通過難樣本重學(xué)習(xí)的學(xué)習(xí)策略,抑制特征圖像的背景干擾,依據(jù)背景抑制后的特征,得到船舶定位結(jié)果。但是,上述2 種方法均需要利用相機(jī)采集離岸船舶航行圖像,在采集圖像過程中,存在初始校準(zhǔn)時(shí)間長的缺陷,導(dǎo)致定位方法無法滿足離岸船舶的實(shí)時(shí)性需求,且易受外界環(huán)境影響,導(dǎo)致離岸船舶航行圖像采集精度下降,從而影響定位效果。
DDS 協(xié)議屬于一個(gè)發(fā)布/訂閱模型的通用數(shù)據(jù)分發(fā)標(biāo)準(zhǔn),具備較優(yōu)的實(shí)時(shí)性與高效性,廣泛應(yīng)用于各個(gè)領(lǐng)域[6?7]。在位置定位領(lǐng)域中,應(yīng)用DDS 協(xié)議可快速、可靠、實(shí)時(shí)地傳輸定位信息。為此,研究基于DDS協(xié)議的離岸船舶實(shí)時(shí)定位方法。
1 離岸船舶實(shí)時(shí)定位方法設(shè)計(jì)
在離岸船舶上安裝移動(dòng)閱讀器,航道兩側(cè)安裝固定標(biāo)簽,航道兩側(cè)的固定標(biāo)簽位置已知。當(dāng)固定標(biāo)簽位于離岸船舶的移動(dòng)閱讀器范圍內(nèi)時(shí),移動(dòng)閱讀器以無線射頻的方式,傳輸該范圍內(nèi)固定標(biāo)簽信息至移動(dòng)閱讀器內(nèi)。移動(dòng)閱讀器利用改進(jìn)加權(quán)質(zhì)心定位算法,結(jié)合移動(dòng)閱讀器接收固定標(biāo)簽信息的接收信號(hào)強(qiáng)度(RSSI)值,計(jì)算移動(dòng)閱讀器的位置信息,即離岸船舶的位置信息。
通過DDS 協(xié)議信息分發(fā)單元,傳輸離岸船舶位置信息至后臺(tái)服務(wù)器。DDS 協(xié)議信息分發(fā)單元中信息發(fā)布者為移動(dòng)閱讀器。移動(dòng)閱讀器通過啟動(dòng)分發(fā)服務(wù),結(jié)合DDS 接口完成數(shù)據(jù)分發(fā),將離岸船舶的實(shí)時(shí)位置信息,傳輸至全局?jǐn)?shù)據(jù)空間內(nèi)。
全局?jǐn)?shù)據(jù)空間負(fù)責(zé)登記移動(dòng)閱讀器與服務(wù)器全部信息,還負(fù)責(zé)緩存移動(dòng)閱讀器發(fā)布的離岸船舶實(shí)時(shí)位置信息,確保服務(wù)器能夠精準(zhǔn)查詢到需要的信息。全局?jǐn)?shù)據(jù)空間會(huì)按照位置信息的有效期,動(dòng)態(tài)刪除或調(diào)整信息,形成一個(gè)信息緩沖隊(duì)列。信息緩沖隊(duì)列的作用是緩沖服務(wù)器已訂閱卻沒有及時(shí)接收的離岸船舶實(shí)時(shí)位置信息。全局?jǐn)?shù)據(jù)空間中分發(fā)代理負(fù)責(zé)控制分發(fā)服務(wù)中的傳輸過程、QoS 與優(yōu)先級(jí),確保離岸船舶實(shí)時(shí)位置信息,發(fā)送至指定服務(wù)器內(nèi)。信息分發(fā)管理節(jié)點(diǎn)負(fù)責(zé)根據(jù)服務(wù)器的訂閱請(qǐng)求,以及移動(dòng)閱讀器的發(fā)布請(qǐng)求,管理各節(jié)點(diǎn)的信息分發(fā)路徑,提升離岸船舶實(shí)時(shí)位置信息傳輸?shù)陌踩煽啃浴?/p>
服務(wù)器為信息訂閱者。服務(wù)器通過調(diào)用DDS 接口對(duì)全局?jǐn)?shù)據(jù)空間存儲(chǔ)的離岸船舶實(shí)時(shí)位置信息,進(jìn)行訂閱或退訂[8],利用顯示器呈現(xiàn)訂閱的離岸船舶實(shí)時(shí)位置信息,實(shí)現(xiàn)離岸船舶實(shí)時(shí)定位。
基于DDS 協(xié)議的離岸船舶實(shí)時(shí)定位方法的技術(shù)架構(gòu)如圖1 所示。

圖1 技術(shù)架構(gòu)Fig.1 Technical architecture
1.1 基于DDS 協(xié)議的船舶位置信息傳輸過程
DDS 協(xié)議中,移動(dòng)閱讀器為信息發(fā)布者,用于發(fā)布離岸船舶實(shí)時(shí)位置信息,服務(wù)器為訂閱者,用于查詢離岸船舶的實(shí)時(shí)位置信息。利用DDS 協(xié)議傳輸離岸船舶實(shí)時(shí)位置信息的流程如圖2 所示。
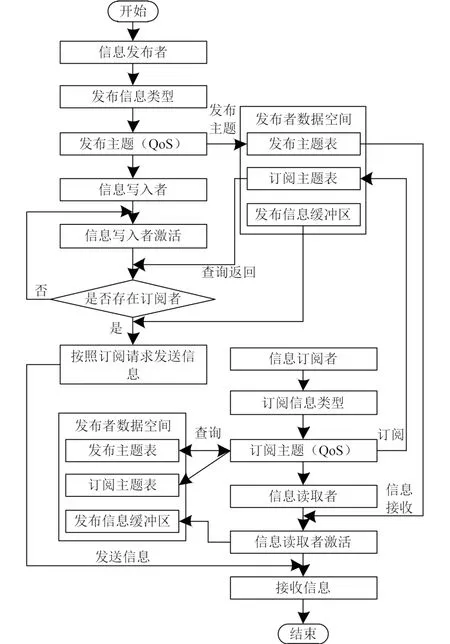
圖2 離岸船舶實(shí)時(shí)位置信息傳輸流程Fig.2 Real-time location information transmission process of offshore ships
位置信息發(fā)布過程:移動(dòng)閱讀器在發(fā)布離岸船舶實(shí)時(shí)位置信息時(shí),會(huì)構(gòu)造一個(gè)信息寫入者,寫入者將要發(fā)布的實(shí)時(shí)位置信息主題以及服務(wù)質(zhì)量,發(fā)布至發(fā)布者數(shù)據(jù)空間的信息緩沖區(qū)內(nèi)。發(fā)布成功后,寫入者進(jìn)入阻塞等待狀態(tài),其余各移動(dòng)閱讀器陸續(xù)在發(fā)布信息緩沖區(qū)內(nèi)添加發(fā)布記錄。
位置信息訂閱過程:在服務(wù)器要訂閱某主題的離岸船舶實(shí)時(shí)位置信息時(shí),移動(dòng)閱讀器需構(gòu)造一個(gè)信息讀取者。讀取者會(huì)先在發(fā)布信息緩沖區(qū)內(nèi)尋找匹配的發(fā)布者,再傳輸主題與服務(wù)質(zhì)量信息至發(fā)布者數(shù)據(jù)空間內(nèi),然后進(jìn)入阻塞狀態(tài)等待實(shí)時(shí)位置信息讀取過程中被激活。最后,讀取者被激活后,移動(dòng)閱讀器會(huì)接收讀取者訂閱的實(shí)時(shí)位置信息。
1.2 離岸船舶實(shí)時(shí)定位的實(shí)現(xiàn)
移動(dòng)閱讀器利用改進(jìn)加權(quán)質(zhì)心定位算法,根據(jù)移動(dòng)閱讀器與固定標(biāo)簽間的RSSI 值,計(jì)算移動(dòng)閱讀器的實(shí)時(shí)位置,即離岸船舶實(shí)時(shí)位置。
移動(dòng)閱讀器位置坐標(biāo)計(jì)算公式如下:
式中:為固定標(biāo)簽A,B,C至移動(dòng)閱讀器間的距離lA,lB,lC;(xA,yA),(xB,yB),(xC,yC)為A,B,C的坐標(biāo);(x,y)為移動(dòng)閱讀器的坐標(biāo)。
令移動(dòng)閱讀器接收第A個(gè)固定標(biāo)簽ZA的RSSI 均值為RS S IA,來自ZA的信號(hào)強(qiáng)度均值為PA,則
ZA接收來自固定標(biāo)簽ZB的RSSI 均值是RS S IAB;信號(hào)強(qiáng)度均值為PAB。公式如下:
令固定標(biāo)簽ZA和ZB間的距離是lAB,以ZA和ZB為參考,計(jì)算ZA和移動(dòng)閱讀器間的距離lA,公式如下:
同理獲取lB,lC的計(jì)算結(jié)果,并將lA,lB,lC代入式(1)和式(2)中獲取移動(dòng)閱讀器的坐標(biāo),即離岸船舶實(shí)時(shí)位置。
2 實(shí)驗(yàn)分析
以民用船舶為實(shí)驗(yàn)對(duì)象,類型主要包括商船、漁船與工程作業(yè)船,3 種類型船舶的具體參數(shù)如表1所示。

表1 船舶的具體參數(shù)Tab.1 Specific parameters of ships
隨機(jī)選擇15 艘離岸船舶,利用本文方法對(duì)這15 艘離岸船舶進(jìn)行實(shí)時(shí)定位,離岸船舶運(yùn)行120 min后的實(shí)時(shí)定位結(jié)果如圖3 所示。

圖3 離岸船舶實(shí)時(shí)定位結(jié)果Fig.3 Real-time location results of offshore ships
可知,當(dāng)離岸船舶航行120 min 后,本文方法可以有效實(shí)時(shí)定位離岸船舶位置,且定位結(jié)果與實(shí)際位置非常接近。上述實(shí)驗(yàn)證明,本文方法可精準(zhǔn)實(shí)時(shí)定位離岸船舶。
以其中1 艘離岸船舶為例,利用本文方法對(duì)該艘離岸船舶進(jìn)行實(shí)時(shí)定位,并根據(jù)實(shí)時(shí)定位結(jié)果生成離岸船舶航行軌跡,分析本文方法的實(shí)時(shí)定位效果,分析結(jié)果如圖4 所示。

圖4 本文方法的實(shí)時(shí)定位效果Fig.4 Real-time positioning effect of the proposed method
可知,本文方法可有效定位不同時(shí)刻離岸船舶的位置,根據(jù)本文方法定位生成的實(shí)際航行路徑,與規(guī)劃的航行路徑非常接近,說明本文方法的實(shí)時(shí)定位結(jié)果精度較高。
分析本文方法在不同信息量時(shí)的信息分發(fā)效果,通過信息分發(fā)丟包率衡量本文方法的信息分發(fā)效果,信息分發(fā)丟包率越低,說明信息分發(fā)效果越佳,信息分發(fā)丟包率閾值為20%。信息分發(fā)丟包率分析結(jié)果如圖5 所示。
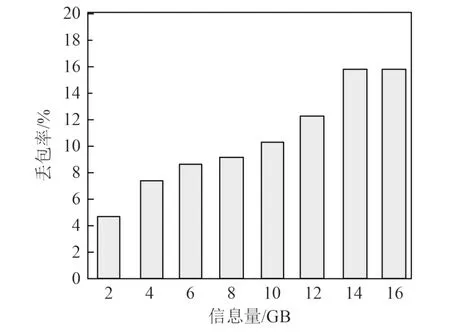
圖5 信息分發(fā)丟包率分析結(jié)果Fig.5 Analysis result of packet loss rate of information distribution
可知,隨著信息量的增加,本文方法的信息分發(fā)丟包率呈上升趨勢(shì),當(dāng)信息量達(dá)到14 GB 時(shí),信息分發(fā)丟包率趨于穩(wěn)定,穩(wěn)定在16%左右,并未超過設(shè)置閾值,說明不同信息量時(shí),本文方法的信息分發(fā)效果較優(yōu)。
3 結(jié)語
離岸船舶定位精度,直接影響離岸船舶的航行安全。為此,依據(jù)DDS 協(xié)議的高效性,研究基于DDS協(xié)議的離岸船舶實(shí)時(shí)定位方法,精準(zhǔn)定位離岸船舶位置,并滿足船舶定位的實(shí)時(shí)性需求。應(yīng)用本文方法可幫助船舶管理岸上總站,實(shí)時(shí)了解各離岸船舶的實(shí)時(shí)位置,及時(shí)發(fā)現(xiàn)離岸船舶潛在的碰撞危險(xiǎn),并加以糾正,提升離岸船舶航行安全性。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會(huì)展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00
祝您健康(1987年3期)1987-12-30 09:52:32