基于視覺傳達的模糊艦船圖像目標分類檢測
2023-06-13 09:12:32郭璟瑤
艦船科學技術 2023年9期
郭璟瑤
(鄭州科技學院, 河南 鄭州 450064)
0 引 言
隨著水下和水面電子對抗技術的不斷升級發展,對艦船目標的準確識別要求不斷提升,結合計算機圖像和視覺傳達技術,構建模糊艦船圖像目標分類檢測模型,結合光學處理和圖像信息增強技術,采用目標艦船的特征點分析和視覺信息增強處理技術,通過對特征點的分類提取,提高對模糊艦船圖像目識別能力。研究模糊艦船圖像目標識別方法,在提高對艦船目標的準確辨識能力方面具有重要意義,相關算法研究在軍事領域具有很好的應用價值[1]。
對模糊艦船圖像目標圖像識別建立在對特征點提取和像素特征分析基礎上,通過對模糊艦船圖像目標特征分類提取。通過視覺傳達和信息增強,實現對模糊艦船圖像的幀分類檢測。當前方法中,對艦船圖像目標分類方法主要有模糊C均值分類檢測方法、Harris角點特征提取方法等[2–3]。通過對輸入圖像的濾波降噪和信息增強,實現對艦船目標的特征點分類提取和識別[4],但當前方法對模糊目標艦船的分類檢測識別能力不好。針對上述問題,本文提出基于視覺傳達和圖像增強的模糊艦船圖像目標分類檢測模型。首先進行圖像特征檢測和預處理,構建糊艦船圖像的多傳感視覺采集模型,采用目標圖像與背景圖像差分分析方法實現對艦船圖像的目標特征提取和聚類處理;然后根據視覺聚類傳達和目標圖像的特征點增強結果,實現對圖像目標分類檢測算法設計。最后進行仿真測試,得出有效性結論。
1 圖像視覺模型及預處理
1.1 模糊艦船圖像視覺模型
為實現對模糊艦船圖像目標分類檢測,結合標量、矢量和張量特征分析,采用多傳感器陣列視覺采集方法,實現對模糊艦船目標圖像采樣。對采集的模糊艦船圖像進行視覺增強處理,提取模糊艦船圖像的同態特征點[5],通過特征點聚類結果進行目標分類檢測,總體實現流程如圖1所示。
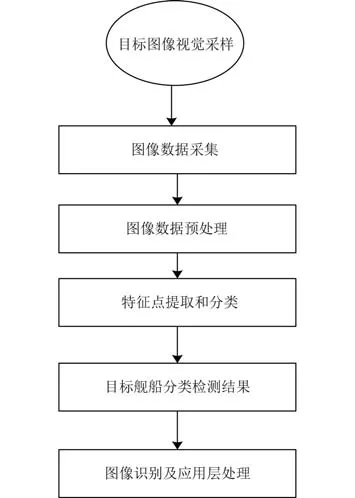
圖1 模糊艦船圖像分類檢測總體實現流程Fig.1 Overall implementation process of fuzzy ship image classification and detection
根據圖1的總體設計流程,根據空間的位置信息分布,構建圖像采集模型,得到艦船目標圖像結構化和非結構化混合像素分布:
式中:J(w,e)為模糊艦船目標數據點均勻的排列像素點;ai為空規則網格類型分量;φ(xi)為模糊艦船目標空間排布中的確切位置,N為模糊艦船目標的像素點數。
根據同一個方向上相鄰點特征分析,得到艦船目標圖像的邊緣輪廓為:
式中:Jc為圖像濾波傳遞度系數;?(x)為模糊艦船目標的位置信息分布鄰域大小。
結合目標的運動參數信息特征重組,得到模糊艦船目標邊緣輪廓視覺特征分解結果為:
式中:A為模糊艦船目標細粒度屬性值在數組中儲存分量;t(x)為三維數據場可視化增強系數;J(x)t(x)為圖像的視差分量。
由此構建對模糊艦船圖像采集的視覺分析模型,根據視覺傳達和特征分類結果進行目標特征點分類檢測。
1.2 艦船圖像增強處理
根據對模糊艦船圖像視覺模型分析和視覺采集結果,為了提高對目標艦船的識別能力,還需要進行圖像增強處理,結合圖像濾波技術,通過明暗計算、裁剪、紋理映射處理,得到目標艦船圖像的視覺增強判決函數為:
式中:V(t)為模糊艦船目標三維數據場中某些屬性的先驗信息分量;W(t)為預處理過的數據統計值;為三維空間數據場的視角色差分量;為切片級和體素級重建判決函數,H0為切片級和體素級重建的逆函數。
采用幀差識別方法構建艦船目標圖像的多分辨傳感信息增強模型,根據圖像增強處理,提高目標檢測識別能力,這一實現過程如圖2所示。
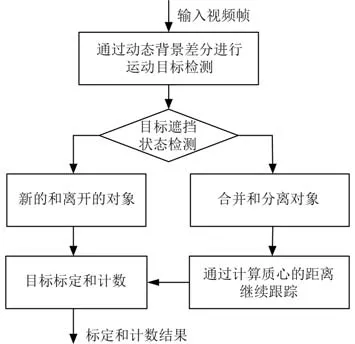
圖2 圖像增強識別實現流程Fig.2 Implementation process of image enhancement recognition
2 模糊艦船圖像目標分類檢測優化
2.1 模糊艦船圖像目標特征點提取
在視覺圖像增強處理的基礎上,采用目標圖像與背景圖像差分分析方法實現對艦船圖像的目標特征提取和聚類處理。首先對每一層圖像的輪廓線進行提取,得到模糊艦船目標的模糊動態特征量為,在此基礎上,確定每層輪廓線的邊界特征點,通過Harris角點分析和HU特征矩檢測技術,得到Harris角點特征提取輸出為:
式中:c0為拓撲結構重建的輪廓線;cN?1為目標之間的2個相鄰的二維匹配參數。
結合圖像增強、去噪等過程,通過上下兩層輪廓線上對應節點的分塊檢測,得到活動區的邊緣像素序列分布為:
式中:I(x)為模兩層輪廓線上對應節點的跨度;A為輪廓線的三維重建幀差分量;t(x)為艦船目標視覺分量層與層之間輪廓;t0為初始采樣時間檢測。
根據一致性檢測和二乘擬合,實現對特征點提取過程中的線性均衡控制和擬合處理,并根據去重算法,得到像素的顯著特征值為:
式中:xi和xj為一個N×N的窗口中目標艦船序列圖像中輪廓線數目;為圖像梯度模函數,由此實現模糊艦船圖像目標特征點提取,根據特征提取結果進行艦船目標圖像分類和動態識別。
2.2 圖像目標特征點分類算法
以二維序列組成的艦船目標圖像體數據為樣本,采用模糊聚類算法實現對特征點分類,得到聚類函數:
式中:μpq為相鄰艦船特征點屬性的表面模型參數;μ00為特征建模的立方體體素;γ為艦船目標每幀的初始 3D 姿態參數。
根據視覺聚類傳達和目標圖像的特征點增強結果,結合模糊C均值聚類算法,得到目標分類迭代函數為:
式中:H為單幀數據集的密度;f為艦船目標每一幀的3D 位姿;n為相同屬性值的等值面體素強度;l為各層、各行、各列的順序遍歷的序列控制參數;A為體素模型分類檢測系數;x˙ ,y˙為x,y方向的采樣間距;f(x,y)為模糊聚類函數。
根據上述分析,實現基于視覺傳達的模糊艦船圖像目標分類檢測算法優化設計。
3 仿真測試
為了驗證本文方法在實現模糊艦船圖像目標分類效果用Matlab和VS2017仿真軟件進行仿真測試。目標艦船采樣額的樣本數為200,訓練集為50,圖像像素視覺分層為30,80,180 層圖像,數據集灰度值75.27,模糊艦船圖像的幀采樣參數設定見表1。
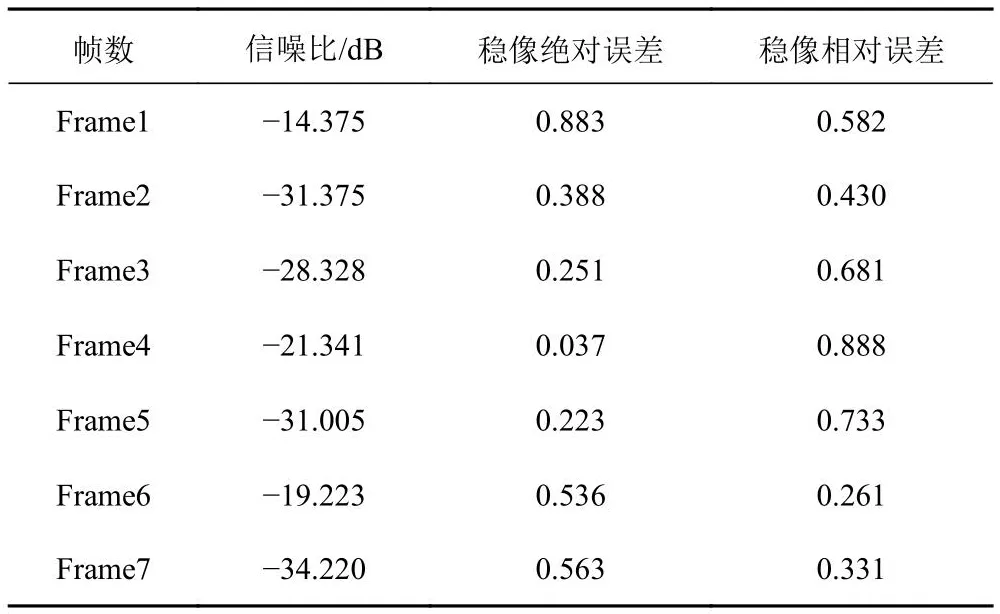
表1 參數設定Tab.1 Parameter Setting
根據上述參數設定,取其中一組樣本為例,得到模糊艦船圖像測試樣本如圖3所示。
圖3 模糊艦船圖像測試樣本Fig.3 Fuzzy Ship Image Test Sample
對圖3采集的模糊艦船圖像進行信息增強處理,并實現對目標特征提取,得到處理結果如圖4所示。

圖4 艦船圖像增強處理Fig.4 Ship Image Enhancement Processing
根據增強處理結果,采用本文方法實現對艦船目標圖像的分類檢測,并與傳統方法對比,仿真結果如圖5和圖6所示。可知,本文方法能有效實現對艦船目標圖像分類和特征提取,特征聚類效果較好,實現對不同目標分類檢測,相比傳統方法,目標聚類性更好,對不同目標的分組檢測和視覺辨識能力更強。

圖5 艦船特征點提取聚類處理Fig.5 Ship feature point extraction and clustering processing

圖6 艦船分類檢測結果Fig.6 Ship classification detection results
4 結 語
研究模糊艦船圖像目標識別方法,提高對艦船目標的準確辨識能力,本文提出基于視覺傳達和圖像增強的模糊艦船圖像目標分類檢測模型。采用多傳感器陣列視覺采集方法,實現對模糊艦船目標圖像采樣,結合圖像濾波技術,通過明暗計算、裁剪、紋理映射處理,采用幀差識別方法,構建艦船目標圖像的多分辨傳感信息增強模型,實現基于視覺傳達的模糊艦船圖像目標分類檢測算法的優化設計。分析得知,本文方法對艦船目標圖像檢測識別的特征分類性較好,提高檢測識別能力。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
