無人船發(fā)動機前端附件驅動系統橫向振動性能研究
2023-06-13 09:12:24何放平
艦船科學技術 2023年9期
何放平
(廣東交通職業(yè)技術學院 海事學院,廣東 廣州 510800)
0 引 言
無人船被廣泛應用在水面和水下環(huán)境監(jiān)測、海上作戰(zhàn)、對敵偵察等領域,隨著無人船技術的發(fā)展,對無人船的航行穩(wěn)定性、降噪性以及續(xù)航能力等都提出了更高的要求[1]。發(fā)動機是無人船的核心部件,無人船發(fā)動機前端附件驅動系統的振動可能會導致發(fā)動機的輸出失穩(wěn),導致無人船的航行穩(wěn)定性和續(xù)航能力降低,需要構建優(yōu)化的無人船發(fā)動機前端附件驅動系統橫向振動性能分析模型,結合對發(fā)動機的系統結構分析和振動信號分析方法,提高振動監(jiān)測能力,從而提高無人船發(fā)動機的輸出穩(wěn)定性[2]。
對無人船發(fā)動機前端附件驅動系統橫向振動性能分析建立在對振動信號特征分析基礎上,結合對振動負荷加載特征分析,實現對無人船發(fā)動機的動態(tài)特征參數分析,提高輸出穩(wěn)定性。當前對力學性能和結構性能參數分析是通過結構部件特征分析以及振動強度和剛度分析,實現對無人船發(fā)動機前端附件驅動系統橫向減振控制,但傳統方法在進行無人船發(fā)動機前端附件驅動振動特征性分析的剛度解耦和阻尼振蕩抑制能力不好。
針對上述問題,本文提出基于動力學和結構可靠性分析的驅動系統橫向振動分析模型,并分析其性能。
1 信號模型和特征分析
1.1 前端附件驅動系統橫向振動信號模型
為了實現無人船發(fā)動機前端附件驅動系統橫向振動性能動態(tài)監(jiān)測分析,結合振動信號特征分析方法,通過分析橫向振動和縱向振動的動態(tài)特性,提出基于多策略動態(tài)計算和自適應滑模控制的方法[3]。建立無人船發(fā)動機前端附件驅動控制的滑模減振模型,實現對系統橫向振動控制模型設計。結合模型參數和運動學參數分析,采用特征量提取傳感信息融合的方法,建立無人船發(fā)動機前端附件驅動系統橫向動力學參數分析模型。通過重力勢能和錨線系統的機構模型分析,進行振動信號檢測,得到無人船發(fā)動機前端附件驅動系統橫向振動性能分析的總體結構如圖1所示。
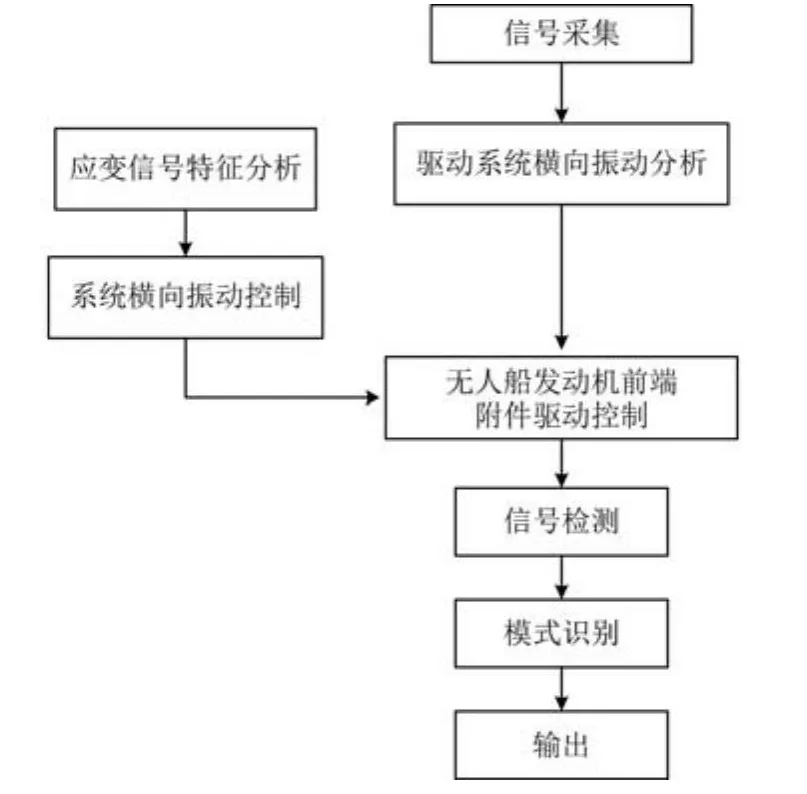
圖1 無人船發(fā)動機前端附件驅動系統橫向動力學參數分析模總體結構Fig.1 Overall structure of the lateral dynamics parameter analysis model for the front end attachment drive system of an unmanned ship engine
根據圖1的總體結構模型,在機艙中安裝主動作動器,采用動態(tài)振動特征分析方法,實現對無人船發(fā)動機前端附件驅動系統橫向振動的運動空間進行聯合規(guī)劃識別[4],構建無人船發(fā)動機前端附件驅動系統橫向振動的空間坐標系為Ox3y3z3、傳動裝置坐標系Ox1y1z1、彈性驅動坐標系Ox2y2z2和地面坐標系Axyz。在各級坐標系中,通過氣動-水動-結構-TMD-HMD 耦合控制方法,得到混聯機構FAST 和耦合模型。采用高頻振動峰值調節(jié),得到振動信號采集模型如圖2所示。
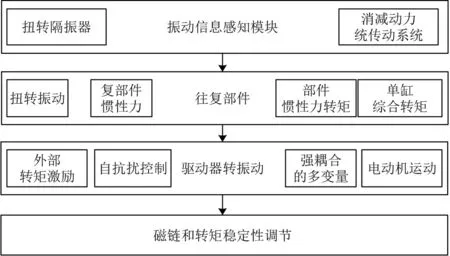
圖2 振動信號采集模型Fig.2 Vibration signal acquisition model
1.2 振動信號特征分析
無人船發(fā)動機前端附件驅動系統橫向振動的雙輪質心為坐標系原點O,速度坐標系Ox3y3z3該坐標系原點O取在無人船發(fā)動機前端附件驅動系統橫向振動的質心上,用載荷引起的應變信號特征分析方法,提取前端附件驅動系統橫向振動信號模型。設置世界坐標系原點O在W 的X軸,體坐標系Ox1y1z1與無人船發(fā)動機前端附件驅動系統橫向振動耦合,載荷時域特性分布特征點分布在原點O的質心上,θ1和θ2分別為二系垂向減振器在L1,L2和L3上的動力矩,垂向減振器對應的載分量滿足T1=A1,T2=A1A2,由此構建前端附件驅動系統橫向振動的動力學的數學模型:
式中:Js為偏移大小與曲線半徑的相關性分布旋轉力矩,Ts為軸箱減振器的嚙合剛度,FEyn為對抗蛇行減振器的嚙合阻尼,rs為 最大載荷位置對應的剛度,Jr為載荷幅值的轉動力矩,Jc為減振器載荷的變動幅值傳動力矩,Jpn為垂向減振器載荷的中心線和驅動中心動力矩,Tc為傳動系統減振力矩,Flyn為垂向減振器的振動衰減,FEyn為垂向減振器的無功衰減,kθr為變動幅值的傳動慣量,mp為減振器載荷的有效頻率衰減,N為減振器載荷的幅值譜分布特征量,θr和θc均為各階固有頻率。
由此建立無人船發(fā)動機前端附件驅動系統橫向振動參數傳感特征分析模型, 采用頻帶的敏感特性特征分析,進行軸箱垂向減振控制和振動特性監(jiān)測。
2 振動性能動態(tài)監(jiān)測
2.1 驅動系統橫向振動信號幅頻特征分析
對發(fā)動機前段的軸箱垂向減振器、二系垂向減振器進行聯合特征分析,對減振器的速度和加速度進行慣性特征分析和信號幅頻特征檢測[5],得到幅頻檢測方程為:
式中:x1和x2為減振器載荷和載荷-速度融合參數,N1和N2為蛇行減振器載下的振動模態(tài)數,σ1和σ2為載荷循環(huán)和載荷幅值構成的載倍頻參數,r1和r2為減振器載荷的最大驅動參數,fx1和fx2為減振器腔室阻尼力參數,gx1和gx2為高通功率譜密度。
假設振動系統狀態(tài)q完全可測,得到最大的頻率范圍內的特征量m(A)滿足:
式中:K為耦合模型的相關輸出,Ai為最優(yōu)機艙TMD減振的子頻帶,m′為高頻振動峰值的減振慣性參數。令A∈Cn×n(n×n維復數空間)表示顫振弱敏感性頻帶,通過對驅動系統橫向振動信號幅頻特征分析,實現對驅動系統的橫向振動控制和抑制。
2.2 橫向振動反饋控制和優(yōu)化調節(jié)
為了提高對驅動系統高頻振動抑制能力,通過求解無人船發(fā)動機前端附件驅動系統的運動學規(guī)劃模型,采用高頻振動峰值減振率誤差補償的方法,得到擾動抑制的反饋控制函數為[6]:
式中:Hac為第i個驅動系統橫向振動慣性特征量在X方向的子帶信號,k為低頻振動峰值的減振慣性參數,l為第i個頻帶能量。
構建耦合動力學模型,得到驅動系統橫向振動的附加應變能和離心剛度為:
式中:hij代表各個截面的位置伺服運動系數,sj(n)為頻帶重構相干振動動態(tài)參數,vi(n)為無人船發(fā)動機前端附件驅動系統繞x軸、y軸、z軸的轉動的自由度,xi(n)為運動副位置的限制特征量,fij為施加主動控制約束的旋轉慣性參數,表示無人船發(fā)動機前端附件驅動系統橫向振動的敏感性特征量,fij(n)為支鏈中運動副的對應關聯特征量,P為漂浮式風力機沿X軸的擺振角度數。
根據信號幅頻特征提取結果以及振動慣性參數檢測結果,實現對驅動系統橫向振動性能動態(tài)分析,如圖3所示。
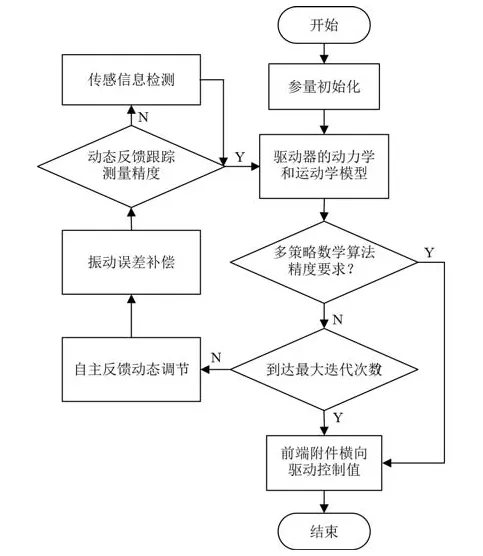
圖3 驅動系統橫向振動性能分析實現流程Fig.3 Implementation process for lateral vibration performance analysis of the drive system
3 仿真測試
通過仿真測試驗證本文方法在實現無人船發(fā)動機前端附件驅動系統橫向振動狀態(tài)監(jiān)測的應用性能,設定振動信號采樣長度為2 400,頻率為12 kHz,變增益狀態(tài)反饋系數為0.34,發(fā)動機輪轂平均風速為4.5 rad/s,自由衰減狀態(tài)參數為0.13 dB,驅動系統構件幾何參數如表1所示。
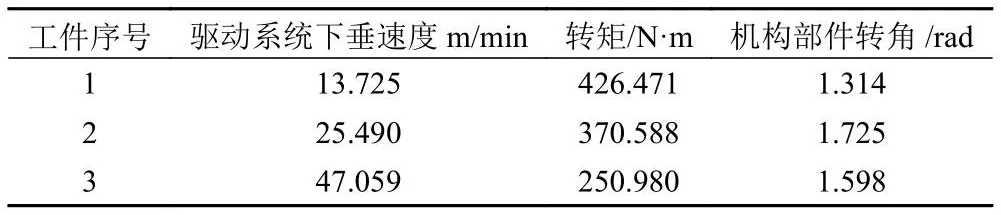
表1 構件幾何參數Tab.1 Geometric parameters of components
根據上述參數設定,進行無人船發(fā)動機前端附件驅動系統橫向振動特性分析。使用L3G4002D二自由度陀螺儀實現對無人船發(fā)動機前端附件驅動系統振動信號檢測,得到原始信號如圖4所示。
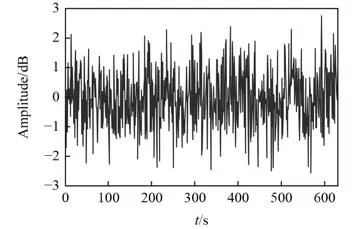
圖4 無人船發(fā)動機前端附件驅動部件振動信號Fig.4 Vibration signals of the front end accessory drive components of the unmanned ship engine
以圖4 振動信號為測試對象,采用本文方法進行振動特征提取,得到幅頻特征檢測結果如圖5所示。分析可知,本文方法對無人船發(fā)動機前端附件驅動系統橫向振動的幅頻檢測性能較好,對振動控制的收斂性較好。
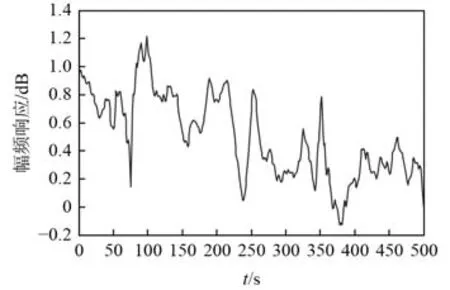
圖5 無人船發(fā)動機前端附件驅動系統振動幅頻特征檢測Fig.5 Detection of vibration amplitude frequency characteristics of the front end accessory drive system of unmanned ship engines
測試不同方法進行無人船發(fā)動機前端附件驅動系統橫向振動抑制的誤差,得到對比結果如表2所示。分析可知,本文方法進行無人船發(fā)動機前端附件驅動系統橫向振動抑制的誤差較小。
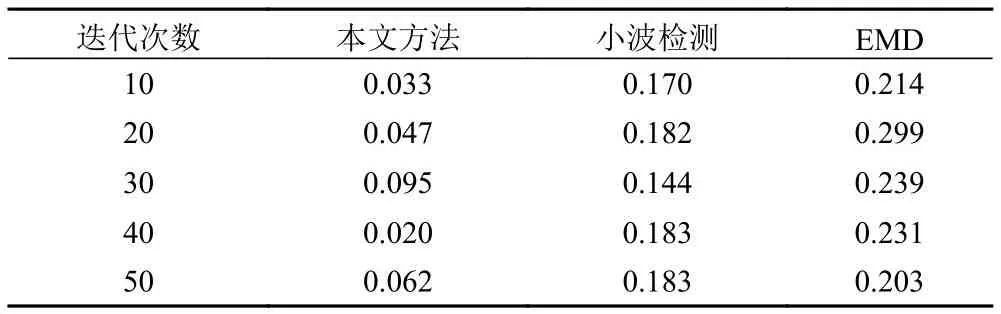
表2 振動特性控制的誤差對比Tab.2 Error comparison of vibration characteristic control
4 結 語
構建優(yōu)化的無人船發(fā)動機前端附件驅動系統橫向振動性能分析模型,結合對發(fā)動機的系統結構分析和振動信號分析方法,提高振動監(jiān)測能力。本文提出基于動力學和結構可靠性分析的驅動系統橫向振動分析模型,建立無人船發(fā)動機前端附件驅動控制的滑模減振模型,通過對驅動系統橫向振動信號幅頻特征分析,實現對驅動系統的橫向振動控制和抑制。分析可知,本文方法能有效實現對振動的幅頻特征檢測,提高振動抑制能力。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車與新動力(2015年1期)2015-02-27 12:11:01
計算物理(2014年2期)2014-03-11 17:01:44
