采用花朵授粉算法的等幾何邊界元形狀優化
2023-06-10 03:22:48高翔王林軍劉洋陳保家付君健
北京航空航天大學學報 2023年5期
高翔,王林軍,*,劉洋,陳保家,付君健
(1.三峽大學 水電機械設備設計與維護湖北省重點實驗室,宜昌 443002;2.三峽大學 機械與動力學院,宜昌 443002)
固體力學中常用的離散方法有有限差分法、有限元法、邊界元法、有限體積法、基面力元法[1],巖土力學中常用的離散方法有離散元法和非連續變形分析,流體力學中常用的離散方法有光滑粒子法、移動粒子半隱式法,斷裂力學中常用的離散方法有擴展有限元法。在固體力學的形狀優化問題中,邊界元法僅需要對邊界進行離散即可,比其他方法更適用于形狀優化問題。
由于CAD 軟件采用樣條曲線建模,而CAE 軟件采用網格建模,樣條曲線在離散過程中會產生較大誤差,導致CAD 模型和CAE 模型的結果存在一定差異。非均勻有理B 樣條(non-uniform relational B-splines, NURBS)曲線靈活多變且精度高,通過等幾何分析將CAD 與CAE 這2 種模型無縫連接后,CAE 的精度會有大幅提升[2]。Simpson 等[3]對二維等幾何邊界元法(isogeometric boundary element method, IGABEM)進行了研究,并與標準邊界元法進行對比。Hao 等[4]通過等幾何有限元法對結構進行分析,并提出了一種基于增強步長調整 (enhanced step length adjustment,ESLA) 法、二階可靠性分析法(second order reliability method, SORM)和加速的序列優化與可靠性評估 (stepped-up sequential optimization and reliability assessment,SSORA)法 的 可 靠性優化設計方法。Lian 等[5]提出了一種基于T 樣條曲線的形狀優化設計方法。Yoon 和Cho[6]通過等幾何邊界元法對結構進行分析,并對線彈性問題的邊界積分方程的敏度進行了推導。Lee 等[7]通過等幾何分析、邊界積分和水平集法提出了一種形狀優化設計方法。Choi 和Cho[8]提出了一種用于等幾何形狀優化的內部控制點更新方法。Lüdeker 等[9]提出了一種逆均勻化結構的等幾何形狀優化設計方法。Kang 和Youn[10]提出了基于修剪樣條曲面的殼結構形狀優化方法。Sun 等[11]通過罰函數法及粒子群算法優化了結構的形狀。由于罰函數法的收斂性依賴于罰因子的初始值,亟需尋找一種收斂性優于罰函數法的計算方法。增廣乘子法的收斂性不依賴于罰因子的初始值,收斂性比罰函數法更好[12]。
梯度優化算法的收斂速度很快,但容易陷入局部最優解,而智能優化算法的全局尋優能力更好。為了提高智能優化算法的全局尋優能力,很多學者提出了不同的改進方法。其中,文化算法能通過雙層進化策略建立的知識庫生成新解[13],云模型能通過熵及隸屬函數生成服從正態分布的新解[14],分布估計算法(estimation of distribution algorithm,EDA)根據當前若干最優解的均值及標準差生成新解[15],基于Alopex 的進化算法(Alopex-based evolutionary algorithm,AEA)通過Alopex 算法確定當前變量步長的正負號[16],精英反向學習(opposite-based learning ,OBL)策略可生成反向解并逐步縮小搜索范圍[17],量子算法通過量子比特編碼提高算法的遍歷性[18],混沌算法[19]、Lévy 飛行[20]、隨機游走[21]這3 種策略均可以提高算法的全局尋優能力。鑒于文獻 [13-21]中算法優良的尋優能力,本文將同時采用精英反向學習策略及EDA 改進優化算法。部分學者采用Copula 理論降低樣本的相關性,提高算法的全局尋優能力[15],但當相關矩陣非正定時,Copula 理論改進的EDA 不再適用。因此,亟需尋找一種實用性更強的EDA。
鑒于增廣乘子法和大規模分布估計算法(large scale EDA,LSEDA)這2 種算法對于優化算法的收斂速度有顯著的改進效果,本文提出一種基于花朵授粉算法和等幾何邊界元的形狀優化算法。該算法有如下優點:①采用邊界元法對結構分析,并通過NURBS 曲線對結構內部的參數進行插值,避免對整個結構進行離散,僅僅離散結構的邊界。②等幾何邊界元法采用NURBS 函數表示物體的邊界,使物體的邊界具有精確的幾何表示,計算精度更高。③采用增廣乘子法對優化模型進行轉換,收斂性優于罰函數法。④梯度優化算法的收斂速度較快,但智能優化算法的全局尋優能力更強,可得到性能更好的結構。⑤LSEDA 是一種融合Gauss 分布和Lévy 分布的混合模型[22],不僅可以保證樣本集中于最優解附近,而且樣本的分布范圍更廣,全局尋優能力更強。⑥采用精英反向學習策略和LSEDA 改進花朵授粉算法,提高算法的收斂速度和魯棒性。Ackley 函數的測試結果表明,本文改進的花朵授粉算法尋優能力更強,收斂更快。2 個形狀優化算例表明,NURBS 曲線重構的結構邊界靈活多樣,且僅需要對結構邊界離散即可。
1 等幾何邊界元法
1.1 NURBS 曲線
階數相同的情況下,B 樣條曲線的基函數數量多于貝塞爾(Bézier)樣條曲線,計算精度更高[23]。若采用p階的B 樣條曲線,則B 樣條曲線的基函數為[24-28]
式中:ξ為節點向量中的一串序列;in為基函數編號。
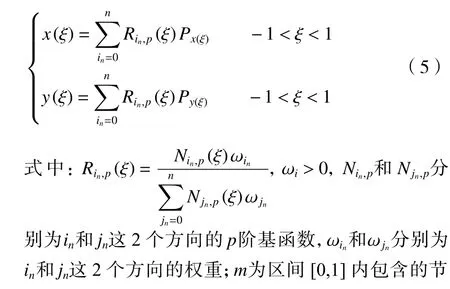
B 樣條曲線上各節點的坐標為
式中:Px(ξ)、Py(ξ)分別為控制點的橫、縱坐標。
NURBS 曲線是一種具有非均勻節點向量 Ξ的有理B 樣條曲線,且有理B 樣條曲線在B 樣條曲線的各節點上添加了權重項 ωin。NURBS 曲線的節點向量和節點坐標分別為

階數p=1,2,3分別對應線性、二次、三次B 樣條曲線,而且B 樣條曲線的p?m階導數連續[23]。
1.2 邊界元法
當 源 點x承 受 沿方向i的 載荷ei(x)時 ,場 點x′沿方向j的位移為uj(x′)。根據邊界元法的理論,載荷ei(x)與 位移uj(x′)之間的關系式為[29-30]

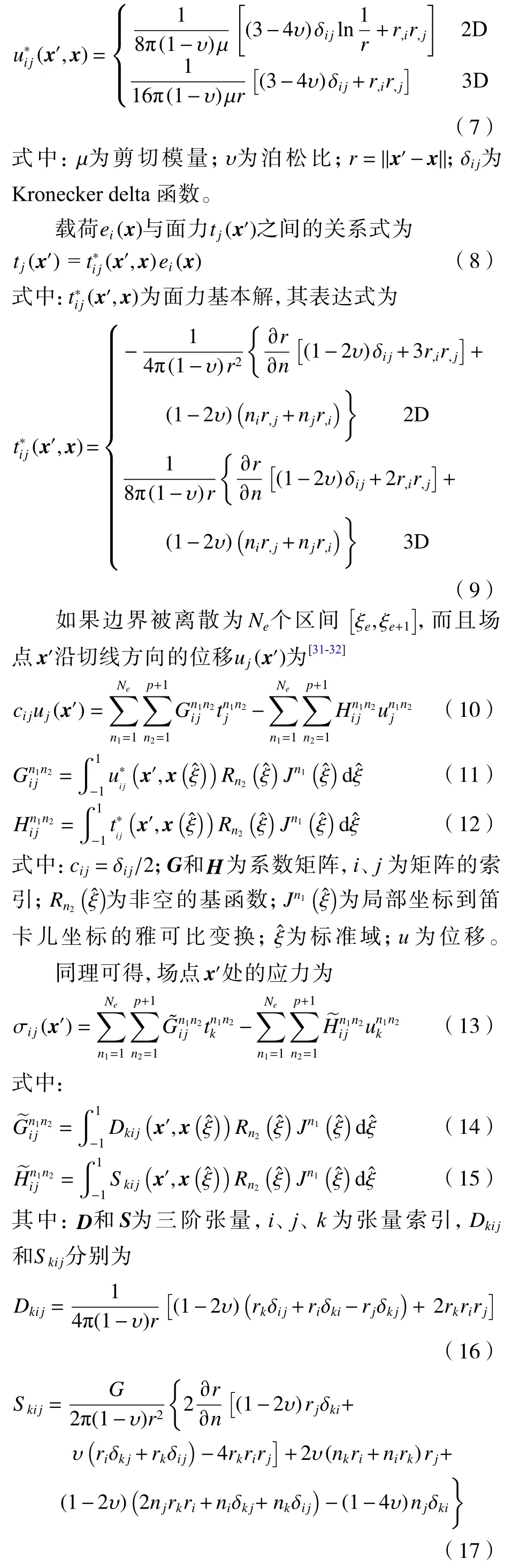
根據式(13)可求得von Mises 應力[33]為
2 優化算法理論
2.1 增廣乘子法
若數學模型的目標函數F(X)有最小值,而且有b個等式約束h(X),則該有約束優化模型可以通過增廣乘子法轉換為無約束優化模型[12],如下:
式中:r0為 罰因子;λ′為拉格朗日乘子;a為b個等式約束條件h(X)的序號。
2.2 花朵授粉算法
Yang[34]提出了花朵授粉算法。該算法中包括4 種花朵授粉規則:①全局授粉(生物授粉和異花授粉);②局部授粉(非生物授粉和自花授粉);③昆蟲授粉;④局部授粉與全局授粉。
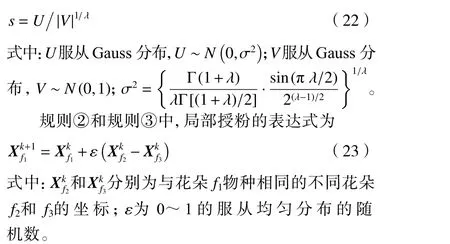
規則①和規則③中,采用Lévy 飛行的全局授粉表達式為

Mantegna 算法是一種效率最高的生成服從Lévy分布的偽隨機數的算法。該算法生成的步長為
規則④中,當隨機數大于指定概率時,采用全局授粉策略;當隨機數小于指定概率時,采用局部授粉策略。
為了提高算法的全局搜索能力,本文采用了精英反向學習策略,如下:
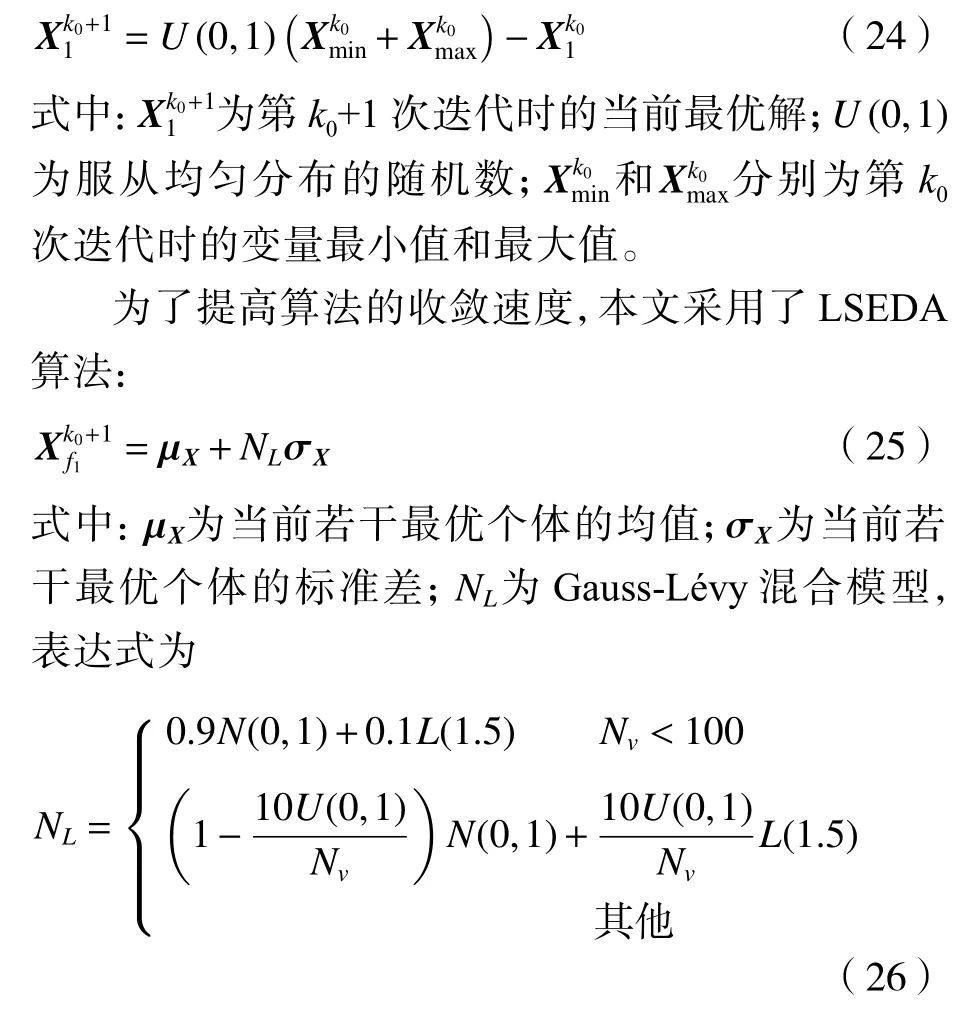
式中:Nv為目標函數下F(X)中自變量X的個數;N(0,1)為服從標準正態分布的隨機數。
由圖1 中的概率密度曲線可知,由于普通EDA通過Gauss 分布生成新解,且新解完全分布于最優解附近,分布范圍太小,導致算法的效率較低。然而,LSEDA 采用了Gauss-Lévy 混合模型,新解主要分布于最優解附近,而且分布范圍更廣,因此LSEDA的效率高于EDA。其中,Cauchy 分布又稱柯西分布,是一種特殊的Lévy 分布。
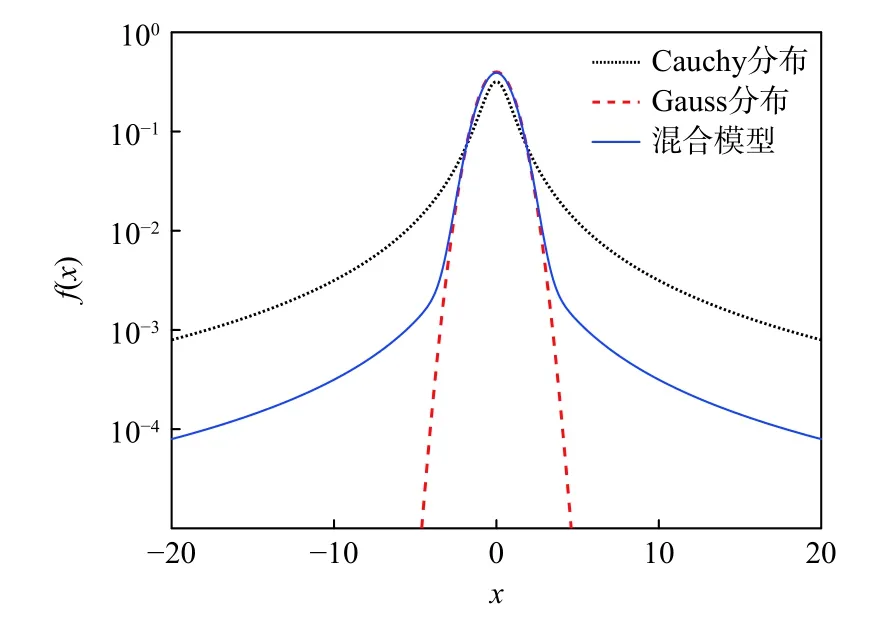
圖1 對數坐標系下的Gauss-Lévy 混合模型Fig.1 Gauss-Lévy mixed model in logarithmic coordinate
本文改進后的花朵授粉算法的計算步驟如圖2所示,具體步驟如下:
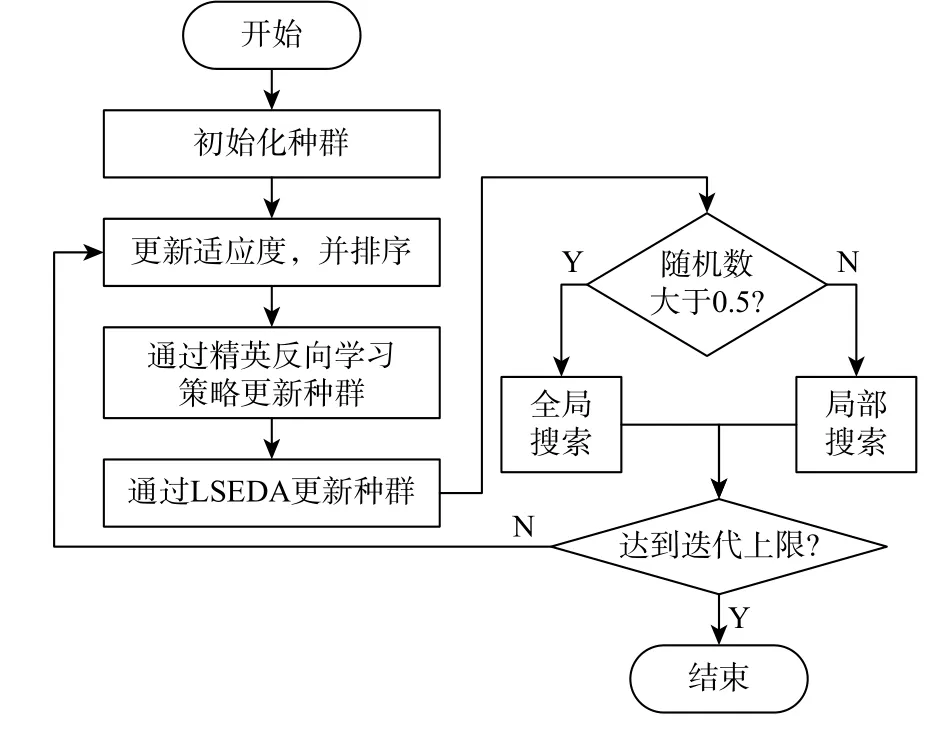
圖2 改進的花朵授粉算法流程Fig.2 Flow chart of improved flower pollination algorithm
步驟1初始化種群。
步驟2計算個體對應的適應度,并按升序對個體進行排列。
步驟3當前的最優解采用精英反向學習策略更新。
步驟4最差的25%個體按照LSEDA 更新。通過Gauss-Lévy 混合模型生成的隨機數,以及當前25%的最優個體的均值和標準差生成新解,并替換25%的最差個體。
步驟5其他未更新的個體采用基本花朵授粉算法更新。隨機數大于0.5 時,全局搜索;隨機數小于0.5 時,局部搜索。
步驟6達到迭代上限時,算法終止。否則,算法轉步驟2。
現采用Ackley 函數測試本文算法的改進效果。該函數中,變量的取值范圍為(?32.768,32.768),且函數的最小值0 所在位置為(0, 0, ···, 0)。通常,Ackley 函數的各參數為:a0=20,b0=0.2,c0=2π,d0為 變量X的維度,且Ackley 函數的表達式為
設花朵授粉算法的種群數量為20 個,迭代上限為200 步。同時采用精英反向學習策略和LSEDA 這2 種算法的花朵授粉算法與基本花朵授粉算法的迭代過程如圖3 所示。
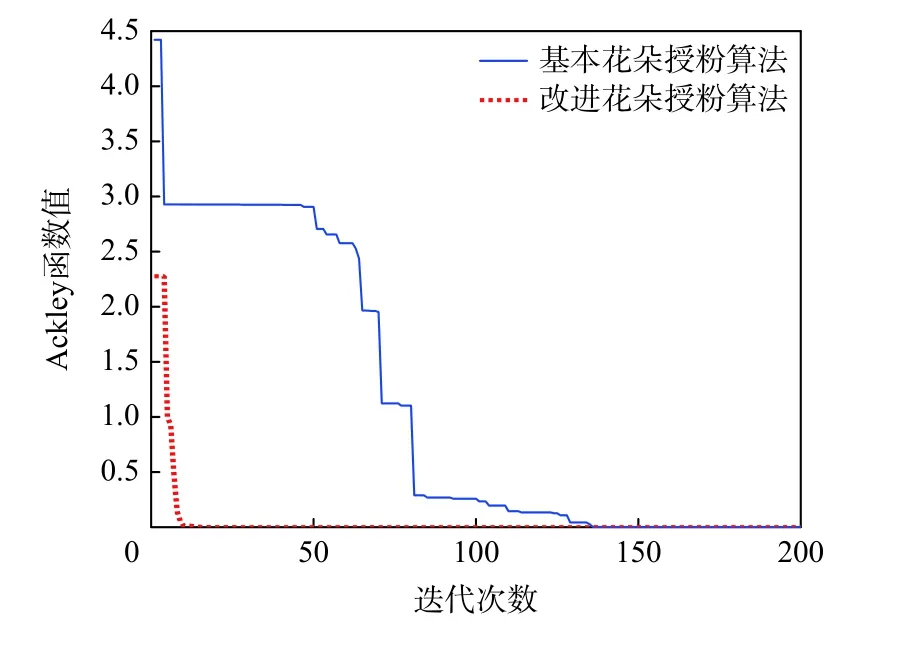
圖3 兩種花朵授粉算法的對比Fig.3 Comparation of two kinds of flower pollination algorithms
由圖3 可知,本文算法在第14 步收斂,最優解為(?0.294 8, ?0.100 1),最小值為8.881 8×10?16;而基本花朵授粉算法在136 步收斂,最優解為(?0.447 0,?0.777 7),最小值為0.001 4。因此,本文算法尋優能力更強,且將采用本文算法優化等幾何邊界元模型,以實現結構的形狀優化設計。
3 基于等幾何邊界元法的形狀優化
本文通過精英反向學習策略和LSEDA 這2 種算法改進了花朵授粉算法,并將該算法用于優化等幾何邊界元模型中的控制點,提出一種新的形狀優化設計算法。該算法的計算流程如圖4 所示。
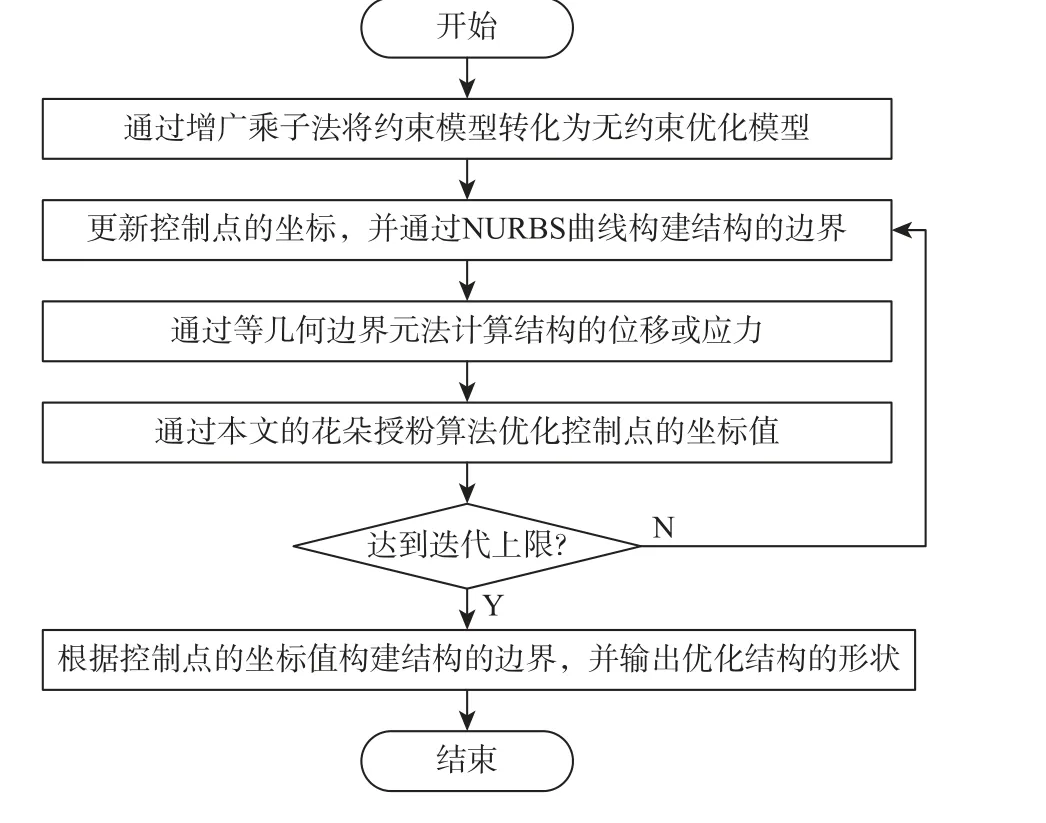
圖4 本文算法流程Fig.4 Flowchart of the proposed algorithm
3.1 位移最小化的形狀優化
結構左端面上方3 個控制點固定,右端面下方3 個控制點承受載荷,橫向載荷50 N,縱向載荷200 N。彈性模量為 2×105MPa,泊松比為0.3。初始結構的參數設置如表1 所示,結構示意圖如圖5(a)所示,初始形狀如圖5(b)所示,NURBS 基函數如圖5(c)所示。
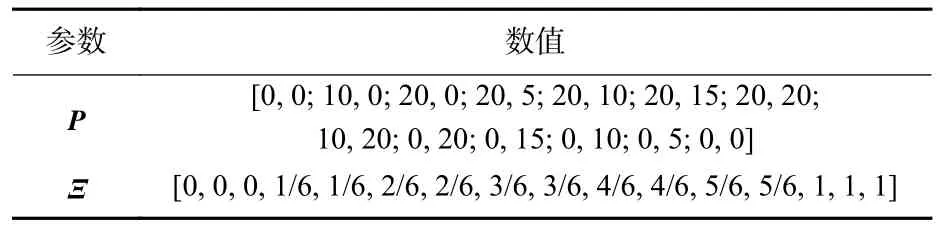
表1 位移算例的控制點及節點向量Table 1 Control points and knot vectors for displacement example
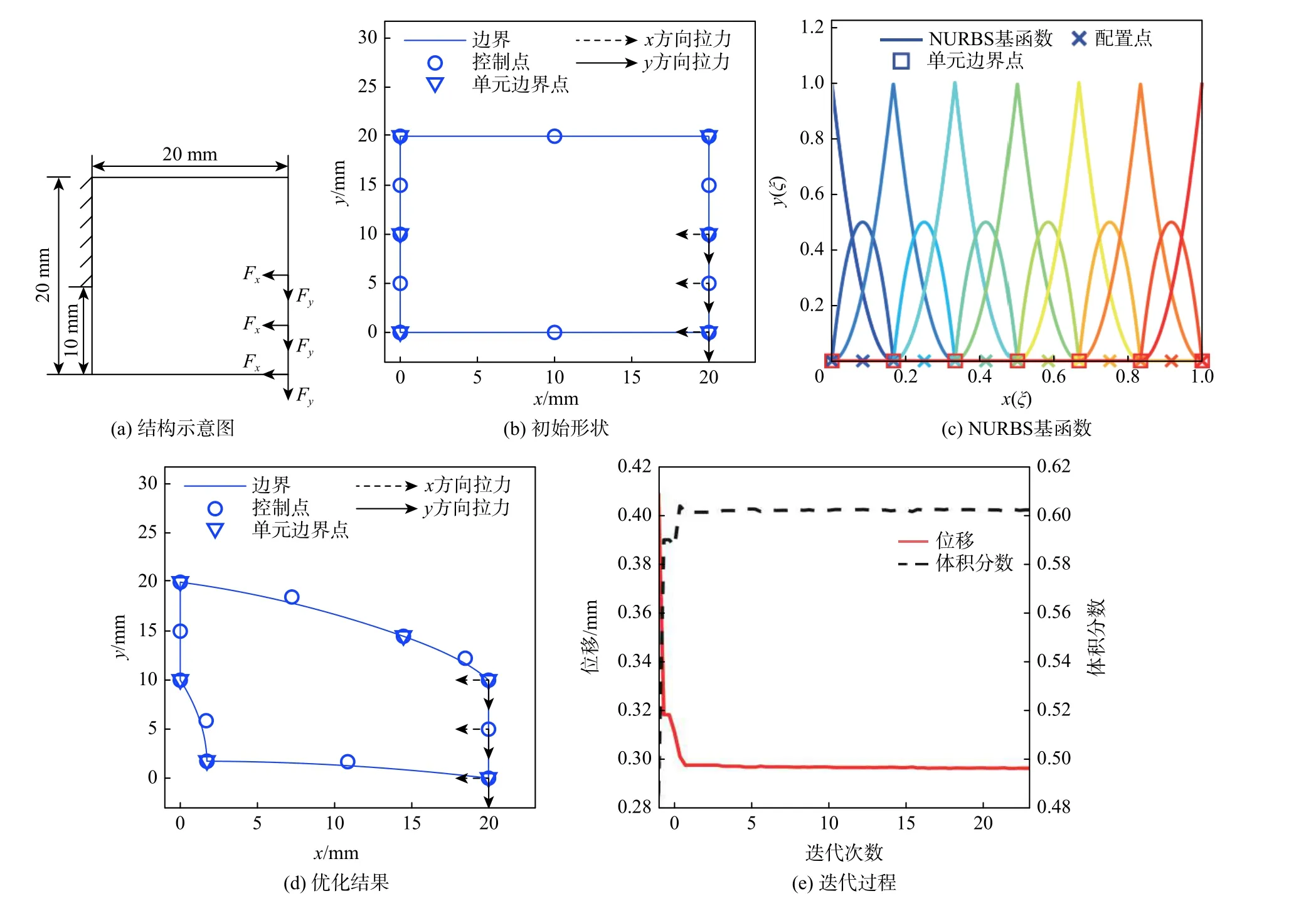
圖5 位移最小化Fig.5 Minimization of displacement
由式(4)可知,表1 中 Ξ對應的NURBS 曲線階數p為2 階,[0,1]內包含的節點數m為10,因此基函數個數為10+2+1=13 個。式(5)為NURBS 基函數的計算式。
現在需要將結構的面積減少至60%,并且最小化每個控制點的最大位移。設罰因子為 1×102,拉格朗日乘子的初始值為0,且每迭代一次,拉格朗日乘子增加 1×10?6,花朵授粉算法所得結果如圖5(d)所示,迭代過程如圖5(e)所示。由圖5(e)可知,花朵授粉算法在10 步以內收斂,收斂性非常好。70 次迭代后,由圖5(c)中的NURBS 基函數構建的結構如圖5(d)所示,且結構中的各控制點的最大位移下降至0.297 2 mm,體積分數為0.602 2。
3.2 應力最小化的形狀優化
結構上端面承受縱向載荷2 000 N,下端面兩端固定,彈性模量為 2×105MPa,泊松比為0.3。初始結構的參數設置見表2,結構示意圖見圖6(a),初始結構見圖6(b),NURBS 基函數如圖6(c)所示。現需要將結構的面積減少,同時最小化每個控制點的最大應力。設罰因子為 1×104,拉格朗日乘子的初始值為0,且每迭代一次,拉格朗日乘子增加 1×10?5。由圖6(e)可知,花朵授粉算法在20 次迭代以內,曲線趨于平緩,收斂性較好。由圖6(c)構建的結果見圖6(d)。
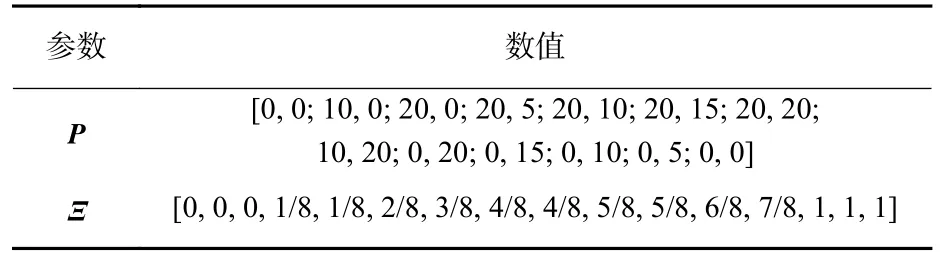
表2 應力算力的控制點及節點向量Table 2 Control points and knot vectors for stress example
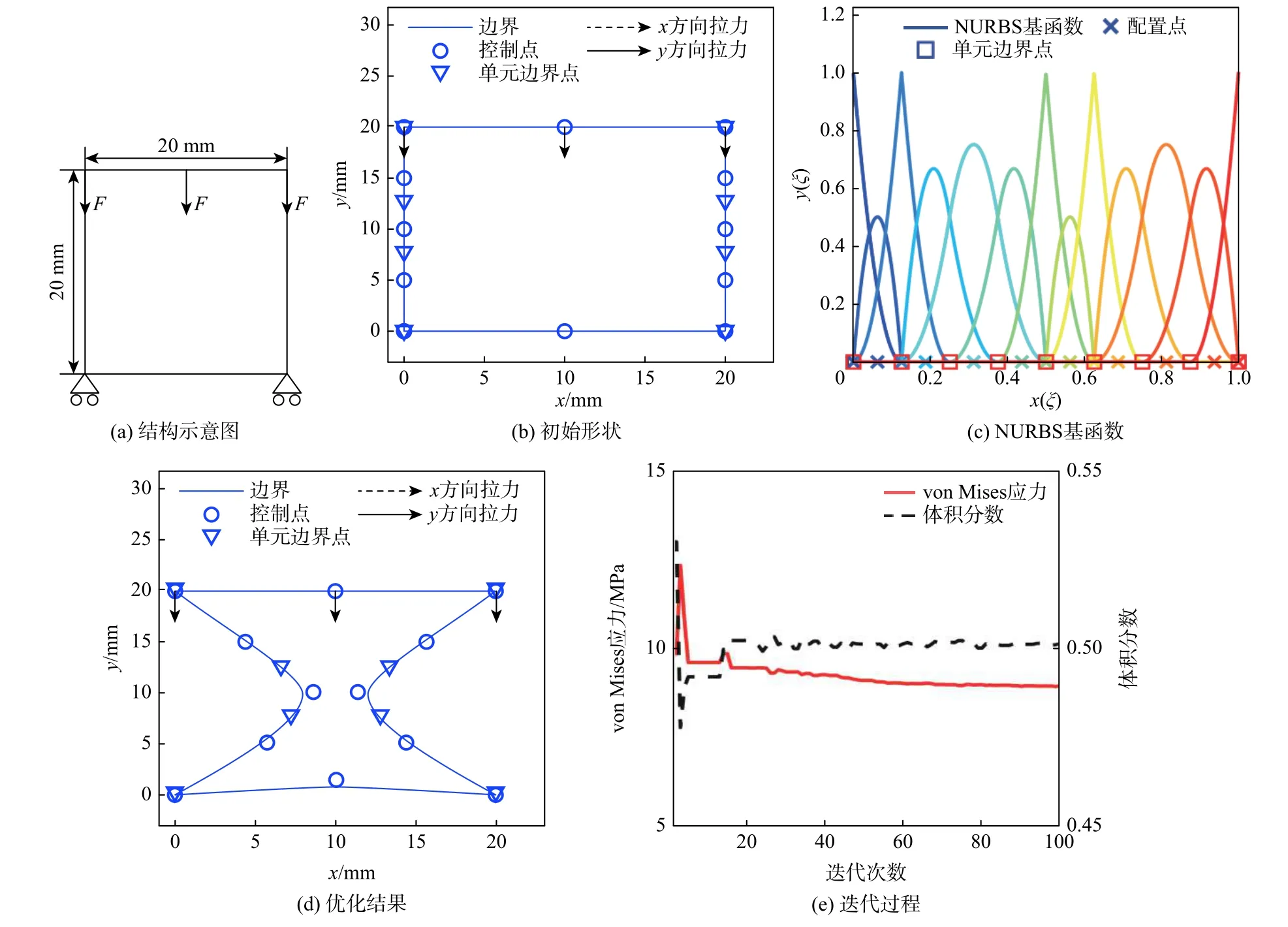
圖6 應力最小化Fig.6 Minimization of stress
4 結 論
通過精英反向學習策略及LSEDA 對花朵授粉算法進行改進,并用于優化等幾何邊界元模型的形狀,算例結果表明:
1)通過精英反向學習策略及LSEDA 這2 種算法改進了花朵授粉算法,且Ackley 函數的測試結果表明,本文算法尋優能力更強。
2)通過本文算法求得的控制點坐標重構了NURBS 曲線,而且該NURBS 曲線非常光滑,能精確地表示結構邊界。
3)結構示意圖中,“單元邊界點”均位于結構的邊界,而結構的其余節點均通過NURBS 基函數及權值進行插值求得,因此“配置點”不一定位于結構的邊界上。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
