烏東德水力發電廠機組分布式勵磁控制系統設計
2023-06-09 18:29:48肖權高向鵬陳沖胡先洪趙先元
水利水電快報 2023年3期
關鍵詞:信號
肖權 高向鵬 陳沖 胡先洪 趙先元
摘要:
針對勵磁系統集中控制架構中無法實現智能控制的問題,在烏東德水力發電廠機組中,采用點對點光纖分布式勵磁控制系統,以嵌入式控制架構為基礎,在分布式勵磁控制系統中對調節器、功率柜及滅磁柜分別設置了獨立分步式控制通道。在調節器中,采用“主用+備用”控制通道方式,控制通道執行勵磁系統控制邏輯運算與對外通訊;在功率柜中,控制通道測量陽極電壓和陽極電流與調節器控制通道共同調整脈沖觸發角,實現控制通道智能均流控制;在滅磁柜中,控制通道監視機組勵磁系統運行工況的同時作為第三控制通道。研究成果驗證了在烏東德水力發電廠實現點對點光纖通訊分布式勵磁控制系統的可靠性與穩定性。
關鍵詞:
勵磁控制通道; 點對點光纖通訊; 調節器; 功率柜; 滅磁柜; 烏東德水力發電廠
中圖法分類號:TM571
文獻標志碼:A
DOI:10.15974/j.cnki.slsdkb.2023.03.010
文章編號:1006-0081(2023)03-0058-05
0 引 言
同步發電機勵磁控制系統是電廠二次控制系統中的核心設備,該系統硬件以嵌入式為基礎,控制軟件以發電機控制模型為基礎[1-2]。數字式勵磁控制系統采用調節器控制通道集中控制,一般采用機箱封裝,機箱內部電路板通過板卡連接,模塊功能分為供電電源、模量信號采集、開關量輸入、開關量輸出、邏輯控制及計算測量單元等[3-5]。調節器集中控制一般采用“主用+備用”控制方式,控制通道之間大多采用CAN總線實現數據通訊[4-5]。多個功率柜共用調節器控制通道,由于同一脈沖源硬件參數存在個體差異,導致功率柜勵磁電流均流系數低。調節器控制通道不能實時判斷功率柜脈沖觸發及可控硅的工作狀態[6]。
ABB公司Unitrol6000分布式勵磁系統實現商業運營,各控制器之間采用光纖通訊。該系統成本高、有技術壁壘、軟件底層無法更改,不能從物理上隔離軟件攻擊的安全風險[7-8]。長江三峽能事達電氣股份有限公司在烏東德水力發電廠機組采用光纖分布式勵磁控制系統。系統以嵌入式為理論基礎[1-2],從硬件與軟件2個層面分層解耦,實現發電機勵磁控制通道分布式控制。分布式勵磁控制系統優勢如下。
(1) 系統依托高冗余的MCU+FPGA嵌入式控制技術,提高測量精度,減小邏輯運算系統響應時間。
(2) 采用點到點的光纖通訊,實現勵磁控制系統高冗余,滅磁柜控制通道為勵磁系統第三控制通道;各功率柜能自動切換,控制通道獨立運行,自動調整脈沖觸發角度,實現功率柜智能均流等。
(3) 系統各控制通道之間自動實現故障通道判斷及通道切換,系統不會因切換而發生擾動。
本文介紹了點對點光纖分布式勵磁控制系統中控制模塊硬件架構、機組信號測量與控制、光纖通訊方案,功率柜邏輯控制方法及其獨立運行方法,并在烏東德水力發電廠12臺機組進行可行性驗證。
1 勵磁控制通道模塊簡介
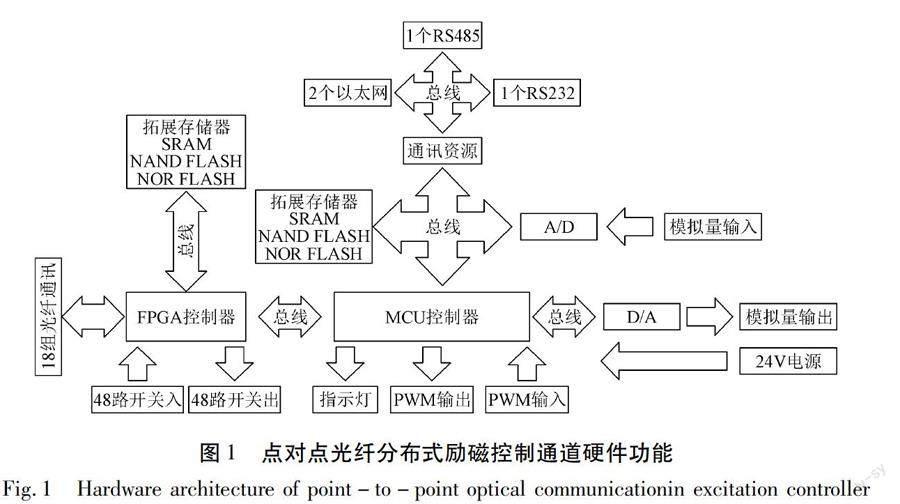
勵磁控制模塊由供電電源、模擬信號、同步信號測頻、通訊、開關量輸入、開關量輸出等單元組成,勵磁控制模塊電氣原理如圖1所示。
勵磁控制模塊采用MCU+FPGA雙核模式;供電電源單元負責將勵磁系統中的24 V電源經過隔離、變換后,給勵磁控制模塊內核單元與外設供電;內核單元由MCU、FPGA、數據存儲SRAM組成;MCU負責執行人機界面通訊及勵磁控制邏輯程序;模擬信號單元由輸入與輸出構成,模擬量輸入單元可以滿足8路模擬信號高速同步采樣,模擬量輸出4路電壓信號;通訊單元由標準RS232串口、RS485串口,CAN總線、10~100 M自適應標準以太網網口及18路光纖收發器組成。
MCU拓展SRAM提高運行速率,拓展NAND FLASH與NOR FLASH存儲機組關鍵報文與機組參數;MCU通過中斷定時器實現快速測量機組頻率,通過2個32位定時器配合實現6路雙窄PWM信號輸出;MCU與FPGA之間通過并行總線方式實現數據的高速交互,FPGA處理18路高速光纖數據信號,光纖通訊速率為5 MBd,開關量輸入與輸出各48路,實現機組的狀態監視;MCU以并行總線方式與AD芯片實行數據傳輸,AD的采樣精度16位,最高采樣速率200 KHz,可以采集0~10 V雙極性信號;模擬量輸出芯片經高速數字總線隔離器隔離,輸出精度16位的0~10 V單極性信號。
2 調節器控制實現方案
2.1 供電電源單元實現方案
24 V輸入電源經共模電感、電容、EMC濾波去耦合給勵磁控制通道供電;控制通道內核單元及其外圍拓展電路通過電源模塊變換成5,3.3 V及±15 V的模擬量輸出電源;在通訊功能單元中,RS232與RS485采用隔離電源實現供電電源的獨立,18路光纖接發器電源與內核共用5 V電源。
2.2 發電機機端電壓、電流測量實現方案
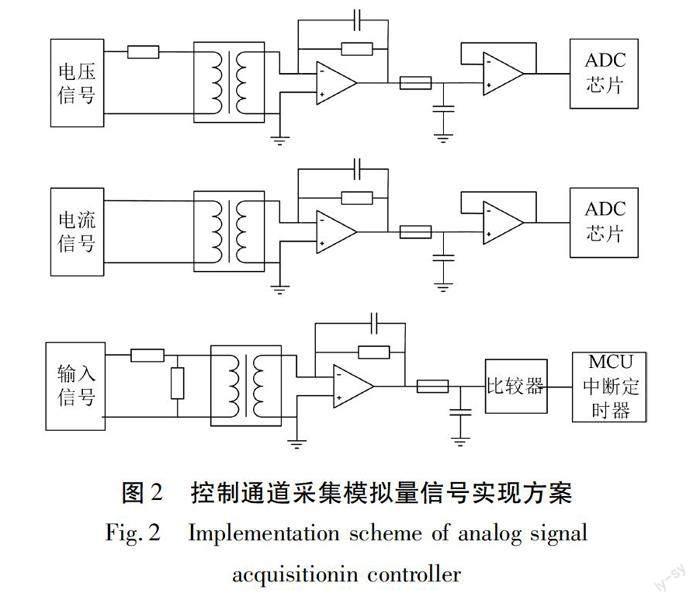
由于勵磁控制通道測量模擬量信號0~10 V,發電機機端信號及系統電壓的幅值大大超過勵磁控制模塊的測量范圍;同時勵磁模塊AD采樣芯片與MCU之間沒有總線隔離,所以勵磁控制通道需要使用信號隔離、變換電路按照比例降低信號幅值,濾除信號中的高頻干擾。
在機端信號隔離過程中,電壓、電流采用高精度的電壓型電流互感器,互感器原副邊電壓隔離等級為5 kV。在烏東德水力發電廠機組勵磁系統中,額定機端電壓為相電壓57.74 V,額定機端電流為相電流1 A,烏東德水力發電廠機組的機端電壓和定子電流的測量范圍為±10 V信號。從圖2可以看出,精密電壓型電流互感器和精密電流互感器以及運放采樣跟隨電路,將輸入的高電壓大電流信號轉換為±10 V可以直接使用的電壓信號,同時對信號的輸入輸出進行了隔離。信號變換后,測量電壓信號誤差小于0.005%。
2.3 模擬量信號軟件實現方案
勵磁控制模塊有16路雙極性,可直采-10~10 V交流信號,在勵磁控制模塊中,機端電壓和定子電流一個周期采用24點,通過傅立葉離散變換,采樣數值在一個采樣周期內均勻分布,通過定時器記數實現發電機模擬信號采樣。
模擬信號輸出是機組勵磁系統執行邏輯運算,并向監控系統輸出機組當前控制角度、PSS反饋輸出、機組勵磁電流等參數。模擬信號輸出值0~32767對應0~10 V電壓信號,外擴展變送器變換成4~20 mA電流輸出。
2.4 開關量狀態監測實現方案
機組開關量輸入與輸出各48個點,開關量輸入信號為24 V或220 V DC信號,48個開關量輸出是以繼電器無源接點對外輸出。
勵磁控制模塊在自動或手動運行狀態時,FPGA的GPIO引腳收到遠方監控控制平臺或現地控制輸入信號以總線方式傳輸給MCU的GPIO引腳;MCU收到輸入信號或MCU執行勵磁控制邏輯運算時,判定發電機工作狀態以總線方式操控FPGA的GPIO引腳對外發出監視信號。
2.5 點對點光纖實現方案
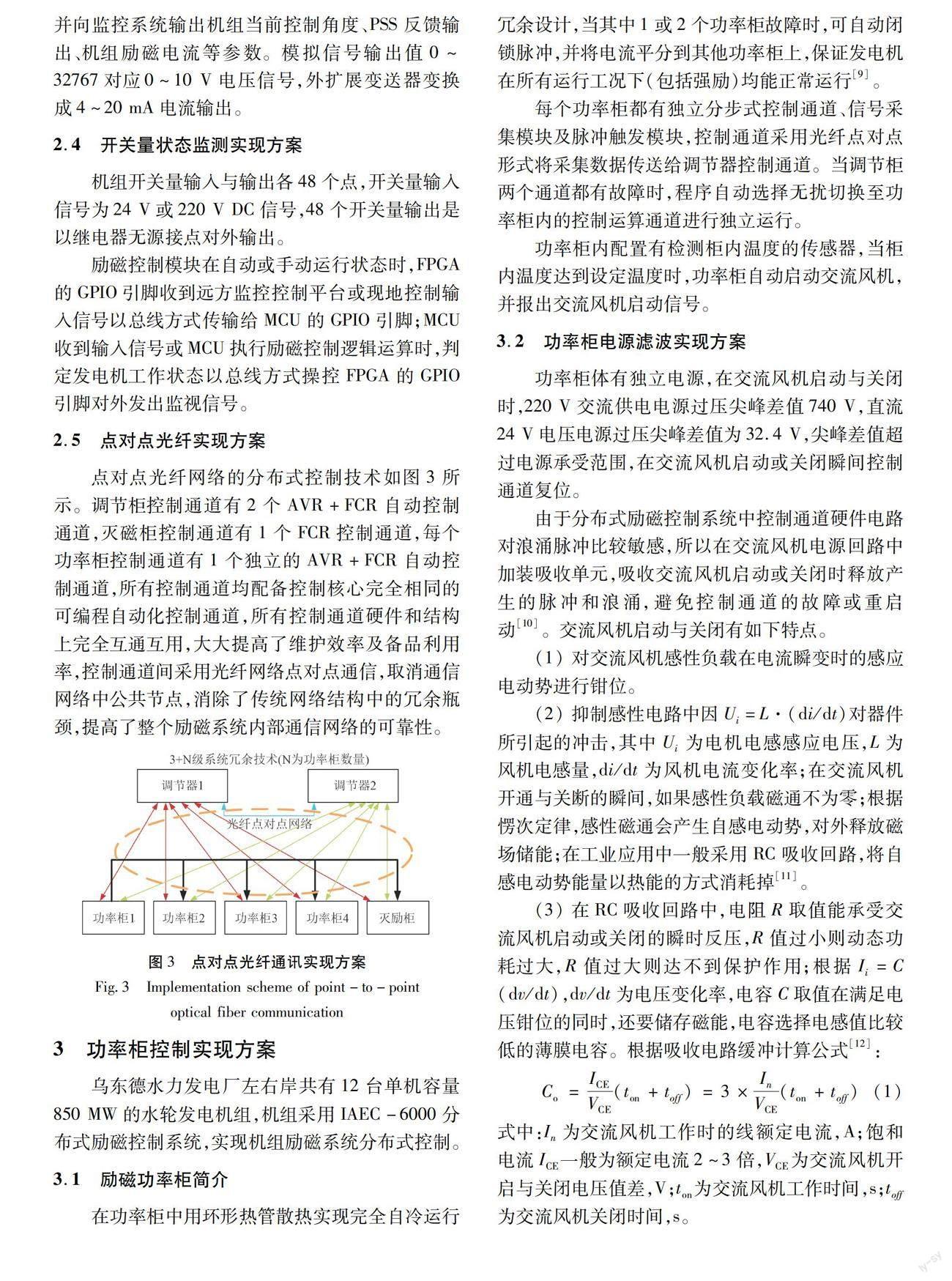
點對點光纖網絡的分布式控制技術如圖3所示。調節柜控制通道有2個AVR+FCR自動控制通道,滅磁柜控制通道有1個FCR控制通道,每個功率柜控制通道有1個獨立的AVR+FCR自動控制通道,所有控制通道均配備控制核心完全相同的可編程自動化控制通道,所有控制通道硬件和結構上完全互通互用,大大提高了維護效率及備品利用率,控制通道間采用光纖網絡點對點通信,取消通信網絡中公共節點,消除了傳統網絡結構中的冗余瓶頸,提高了整個勵磁系統內部通信網絡的可靠性。
3 功率柜控制實現方案
烏東德水力發電廠左右岸共有12臺單機容量850 MW的水輪發電機組,機組采用IAEC-6000分布式勵磁控制系統,實現機組勵磁系統分布式控制。
3.1 勵磁功率柜簡介
在功率柜中用環形熱管散熱實現完全自冷運行冗余設計,當其中1或2個功率柜故障時,可自動閉鎖脈沖,并將電流平分到其他功率柜上,保證發電機在所有運行工況下(包括強勵)均能正常運行[9]。
每個功率柜都有獨立分步式控制通道、信號采集模塊及脈沖觸發模塊,控制通道采用光纖點對點形式將采集數據傳送給調節器控制通道。當調節柜兩個通道都有故障時,程序自動選擇無擾切換至功率柜內的控制運算通道進行獨立運行。
功率柜內配置有檢測柜內溫度的傳感器,當柜內溫度達到設定溫度時,功率柜自動啟動交流風機,并報出交流風機啟動信號。
3.2 功率柜電源濾波實現方案
功率柜體有獨立電源,在交流風機啟動與關閉時,220 V交流供電電源過壓尖峰差值740 V,直流24 V電壓電源過壓尖峰差值為32.4 V,尖峰差值超過電源承受范圍,在交流風機啟動或關閉瞬間控制通道復位。
由于分布式勵磁控制系統中控制通道硬件電路對浪涌脈沖比較敏感,所以在交流風機電源回路中加裝吸收單元,吸收交流風機啟動或關閉時釋放產生的脈沖和浪涌,避免控制通道的故障或重啟動[10]。交流風機啟動與關閉有如下特點。
(1) 對交流風機感性負載在電流瞬變時的感應電動勢進行鉗位。
(2) 抑制感性電路中因Ui=L·(di/dt)對器件所引起的沖擊,其中Ui為電機電感感應電壓,L為風機電感量,di/dt為風機電流變化率;在交流風機開通與關斷的瞬間,如果感性負載磁通不為零;根據愣次定律,感性磁通會產生自感電動勢,對外釋放磁場儲能;在工業應用中一般采用RC吸收回路,將自感電動勢能量以熱能的方式消耗掉[11]。
(3) 在RC吸收回路中,電阻R取值能承受交流風機啟動或關閉的瞬時反壓,R值過小則動態功耗過大,R值過大則達不到保護作用;根據Ii=C(dv/dt),dv/dt為電壓變化率,電容C取值在滿足電壓鉗位的同時,還要儲存磁能,電容選擇電感值比較低的薄膜電容。根據吸收電路緩沖計算公式[12]:
Co=ICEVCE(ton+toff)=3×InVCE(ton+toff)(1)
式中:In為交流風機工作時的線額定電流,A;飽和電流ICE一般為額定電流2~3倍,VCE為交流風機開啟與關閉電壓值差,V;ton為交流風機工作時間,s;toff為交流風機關閉時間,s。
查閱R4D400-AL17-05《交流風機用戶手冊》,交流風機額定工作電流為4.89 A。
Co=3InVCE(ton+toff)=3×4.89740=0.02 μF
為了避免高頻截止頻率信號對控制通道干擾,截止頻率f0值越小越好,結合工程中實際情況[6],取Co=0.1 μF,f0=10 kHz,吸收電阻緩沖計算公式:
Ro=12πf0C0=12×3.14×10×0.1×10-3(2)
Ro=12πf0C0=159 Ω
取Ro=200 Ω,計算截至頻率為
f0=12πRoC0=1062×3.14×200×0.1(3)
f0=7.962 kHz
200R/10W功率電阻與0.1 UF/1 600 V薄膜電容串聯后與交流風機繞組并聯,長時間穩定運行時電阻溫升Δt≤25 ℃。
在交流風機繞組加阻容吸收后啟動或關閉后,風機電源與控制通道24 V電源電源波形未出現畸變。
在交流風機的繞組上加RC吸收,可以得知濾除脈沖和浪涌實驗效果,交流風機啟動或關閉時,對交流供電電源與控制通道24 V電源干擾明顯減少,控制通道沒有出現故障或重啟動。
3.3 功率柜控制通道測量及同步冗余實現方案
功率柜控制模塊通過采集陽極采樣模塊實現陽極電壓、陽極電流及轉子電壓信號直接測量,陽極信號與轉子經高精度、高耐壓的精密互感器與霍爾隔離變換成-10~10 V信號傳輸給功率柜控制通道,陽極信號變換及同步生成硬件電路如圖2所示,控制通道采集信號做功率柜邏輯控制同時,也將功率柜采集參數以點對點通訊方式向調節器發送,經調節器向人機界面發送。
烏東德水力發電廠每套機組勵磁系統中有4個功率柜,每個功率柜有3個同步信號,4個柜體12個同步信號通過功率柜模塊之間點對點通訊方式實現同步信號共享,機組正常運行時同步信號優先級為功率柜1>功率柜>2功率柜3>功率柜4。
功率柜控制通道生成雙窄脈沖方式脈沖生成實現方案如圖4所示。控制通道測量同步信號后觸發定時器,經過脈沖延時后產生第1路固定寬度脈沖,第2路脈沖經過延時后產生第1路固定寬度脈沖的同時,給第2路脈沖生成第一個脈沖,第3~6路脈沖生成方式依次類推[12-14]。
調節器控制通道計算機組的勵磁電流參數,以點到點的光纖通訊方式下發給各功率柜控制通道;功率柜控制通道通過采集陽極電流參數I折算功率柜勵磁電流Ifd=(1/3)×I,由于硬件參數的個體差異,傳統功率柜均流值低于93%[12],功率柜控制通道收到調節器下發的控制角參數后,結合其實際測量的本功率柜電流,執行動態調節控制角參數,實現功率柜智能均流。
3.4 功率柜控制通道獨立運行方案
當調節器兩個通道控制通道同時出現故障時,程序自動選擇無擾切換至功率柜內的控制運算通道進行獨立運行,功率柜控制通道獨立運行方式邏輯如圖5所示。
在功率柜控制通道獨立運行時,勵磁系統功率測量模塊測量發電機機端電壓與電流的功率因素,通過交換機轉發以太網傳輸給各功率柜控制通道,控制通道以恒陽極電壓方式(烏東德為自并勵方式,恒陽極電壓即恒機端電壓方式)運行并向外告警。
4 滅磁柜控制實現方案
在開機階段,滅磁柜控制通道接收到調節通道下發投初勵指令,滅磁柜控制通道啟動投初勵硬件外圍控制電路后,給發電機轉子充磁。在發電機機端電壓上升后,滅磁柜控制通道接收到調節器控制通道后,立即退出投初勵。在機組運行時,滅磁柜控制通道測量發電機的轉子電壓、轉子電流,并同時監測碳化硅滅磁電阻狀態等功能,在轉子過電壓時,控制跨接器投入滅磁電阻,從而實現發電機轉子過壓保護[12]。
5 結 語
烏東德水力發電廠機組采用點對點光纖分布式控制勵磁系統運行超過2 a,功率柜勵磁電流的均流系數大于97%,實現功率柜實時控制功能。在調節器控制退出運行時,功率柜控制通道自動切換到獨立運行。但分布式控制勵磁系統核心物料為進口物料,物料供應穩定面臨風險,今后需進一步加強自主可控的點對點光纖分布式控制勵磁系統研發。
參考文獻:
[1] 陸繼明,毛承雄.同步發電機微機勵磁控制器[M].北京:中國電力出版社,2006.
[2] 李基成.現代同步發電機勵磁系統設計及應用[M].北京:中國電力出版社,2002.
[3] 余翔,王波,毛承雄,等.一種基于PCC的勵磁控制通道實現方案[J].大電機技術,2006(5):58-61.
[4] 余翔,王波,毛承雄,等.一種基于F2812的流程控制通道[J].大電機技術,2007(3):56-59.
[5] 潘熙和,張祖貴,黃業華.PLC與PCC勵磁調節器的研究與實現[J].人民長江,2003(10):21-23,52.
[6] 劉科亮.同步發電機自動勵磁控制裝置設計[D].西安:西安科技大學,2016.
[7] 倪光南,朱新忠.自主可控關鍵軟硬件在我國宇航領域的應用與發展建議[J].上海航天,2021(3) :30-34.
[8] 李友軍,周華良,徐廣輝,等.基于龍芯處理器的繼電保護裝置平臺及關鍵技術[J].電力自動化設備,2022(3) :218-224.
[9] 王波,余翔,胡先洪,等.烏東德水電站機組勵磁系統熱管整流柜設計及試驗[J].人民長江,2021,52(5):120-123,132.
[10] 春蘭.獨立運行光伏發電系統功率控制研究[D].呼和浩特:內蒙古工業大學,2007.
[11] 馮錕,楊婳,陳超,等.短路故障下直流固態斷路器緩沖[J].電力系統保護與控制,2018,46(3):97-102.
[12] 趙先元,余翔,周筱珊.一種基于TMS320F28335的勵磁控制通道[J].水電能源科學,2013(8):214-216.
(編輯:唐湘茜)
Implementation method of distributed excitation control system for Wudongde Hydropower Plant
XIAO Quan1,GAO Xiangpeng1,CHEN Chong2,HU Xianhong2,ZHAO Xianyuan1
(1.Three Gorges Nengshida Electric Co.,Ltd.,Wuhan 430070,China; 2.Wudongde Hydropower Plant,Kunming 651512,China)Abstract:
In view of the excitation system cannot realize intelligent control problems in centralized control architecture,the implementation method of point-to-point optical communication distributed excitation control system in Wudongde Hydropower Plant was introduced.The control system was based on embedded control architecture.In the excitation control system,regulator,sillicon controlled rectifier and discharger have an independent controller.In the regulator,the control channel performs the control logic operation of the excitation system and the communication with the man-machine interface.In the sillicon controlled rectifier,the control channel measures the anode voltage and anode current and adjusts the pulse of trigger angle together with the regulator control channel to realize the intelligent current equalization.In the discharger,the control channel was used as the third control channel while monitoring the operation condition of the excitation system.The reliability and stability of the point-to-point optical fiber communication distributed excitation control system were verified in Wudongde Hydropower Plant.
Key words:
excitation controller;point-to-point optical communication;regulator;sillicon controlled rectifier;demagnetizing cabinet;Wudongde Hydropower Plant
收稿日期:
2022-03-22
作者簡介:
肖 權,男,工程師,碩士,主要從事硬件設計研發工作。E-mail:xiaoquan6789@163.com
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06