基于VR技術(shù)的全景視頻運動目標(biāo)精確追蹤
2023-06-07 04:52:58徐建偉
中國新技術(shù)新產(chǎn)品 2023年5期
徐建偉
(中海油信息科技有限公司湛江分公司,廣東 湛江 524000)
隨著虛擬現(xiàn)實(Virtual Reality,VR)技術(shù)的不斷發(fā)展,VR 技術(shù)已應(yīng)用于教育、醫(yī)療以及交通等領(lǐng)域[1-2]。在視景仿真方面,VR 技術(shù)能夠?qū)θ耙曨l區(qū)域進(jìn)行重構(gòu),在此基礎(chǔ)上對運動目標(biāo)進(jìn)行精確追蹤和識別,提高對全景視頻視覺信息的識別能力,因此研究VR 全景視頻運動目標(biāo)追蹤對提高視頻成像的清晰度和運動目標(biāo)識別的準(zhǔn)確性具有十分重要的意義[3]。
VR 全景視頻技術(shù)快速發(fā)展。為了提高體育教學(xué)的樂趣,蘭青等[4]將VR 全景視頻技術(shù)應(yīng)用于體育教學(xué)實踐中,使體育教學(xué)具有創(chuàng)造性,給學(xué)生帶來了良好的交互式體驗。韓圣千等[5]利用VR 全景視頻技術(shù)對時空切片的傳輸流量進(jìn)行建模,提出了一種基于VR 技術(shù)的全景視頻嵌套優(yōu)化方法,采用實際算例進(jìn)行仿真分析,驗證了該方法的可靠性和實用性。任靖娟等[6]采用Canny 算子處理圖片邊緣信息,并利用角點匹配進(jìn)行全景視頻拼接,提出了一種基于VR 全景視頻的目標(biāo)可視化仿真模型,仿真結(jié)果驗證了該模型能夠廣泛應(yīng)用于多種場景。目前,VR 全景視頻技術(shù)在目標(biāo)追蹤方面的應(yīng)用較少,如何實現(xiàn)全景視頻運動目標(biāo)精確追蹤還有待進(jìn)一步研究。
1 VR 技術(shù)
1.1 VR 的基本概念
VR 技術(shù)是集多媒體、計算機(jī)、圖像處理、仿真和電子等多種技術(shù)于一體的新技術(shù)[7]。它由實體虛擬、虛擬現(xiàn)實和相對復(fù)雜的計算處理組合而成,屬于計算機(jī)模擬系統(tǒng),利用計算機(jī)建模構(gòu)造與現(xiàn)實世界基本相同的虛擬場景。VR 技術(shù)具有4 個基本要素:1) 基本模型。基本模型是將現(xiàn)實場景虛擬化的基礎(chǔ)元素之一,利用建模將現(xiàn)實世界虛擬化,并保留其物理屬性。2) 空間定位。根據(jù)體驗者佩戴的工具定位他的實際位移情況,利用傳感器傳輸信息,系統(tǒng)界面接收信息后及時進(jìn)行反饋。3) 聲音跟蹤。利用傳感器接收聲音并確定聲源位置及其傳播方向,從而提高交互性。4) 視覺追蹤。視覺追蹤是將現(xiàn)實場景虛擬化的核心元素,跟隨體驗者的視覺移動呈現(xiàn)相應(yīng)的畫面,該技術(shù)主要是通過投影來實現(xiàn)的,根據(jù)時間和地點投影不同的畫面,從而確定追蹤對象的位置和方向。
1.2 VR 全景技術(shù)的特點
VR 全景技術(shù)具有以下3 個特點:1) 沉浸性。體驗者處在虛擬場景中,可以觀察周圍環(huán)境,其注意力容易被周圍環(huán)境吸引,從而拉近體驗者與虛擬場景之間的心理距離。VR全景技術(shù)通過刺激體驗者的感知,使體驗者產(chǎn)生共鳴,體驗者在虛擬場景獲得更強的視覺沖擊力后,產(chǎn)生身臨其境的感覺,從而獲得沉浸性的體驗。2) 真實性。VR 全景技術(shù)通過虛擬場景對現(xiàn)實畫面進(jìn)行還原,體驗者可以從任何角度觀看,獲得多維度感觀和體驗,體驗者感覺自身處于真實場景且不受空間和時間的束縛,時空體驗感更好。3) 交互性。與傳統(tǒng)視頻圖像相比,VR 全景技術(shù)使體驗者由被動接收轉(zhuǎn)化為主動參與,通過一些設(shè)備和VR 設(shè)備提高體驗者的主觀能動性,提高其體驗感,體驗者與周圍環(huán)境的交互感更好,從而打破空間的局限性。
2 VR 全景視頻運動目標(biāo)成像及特征分析
2.1 目標(biāo)成像
目標(biāo)成像是指在VR 全景視頻中建立運動目標(biāo)的成像模型,在圖像的邊緣輪廓提取特征值,結(jié)合特征分解方法進(jìn)行信息融合和目標(biāo)成像,并利用高斯模板進(jìn)行匹配,建立基于VR 技術(shù)的全景視頻運動目標(biāo)融合模型。
假設(shè)在運動區(qū)域共分布N 個特征點,每個特征點均滿足圖模型G=(V,E)。其中,運動區(qū)域的模型用dG=(u,v)表示,在成像區(qū)域?qū)D模型G=(V,E)進(jìn)行特征分割并進(jìn)行分塊匹配,得到的像素序列u(2)如公式(1)所示。
式中:u1(2)~u4(2)為4 個像素點。在像素序列中輸入特征數(shù)據(jù),并利用公式(2)計算運動目標(biāo)的像素序列u。
式中:y0、z0、λ 和φ 為4 個光線參數(shù)。
得到的新像素序列u(3)如公式(3)所示。
式中:u1(3)~u4(3)為4 個新的像素點。
利用像素排序方法對像素序列進(jìn)行重組并進(jìn)行濾波處理,就可以得到公式(4)。
式中:c 為濾波后的像素序列;X(3)為特征點。
對公式(4)進(jìn)行逆映射,可以得到目標(biāo)圖像分布均勻的像素點,如公式(5)所示。
式中:θ*、ρ*為2 個光線坐標(biāo);p為均勻分布的像素點;X(cs2)為新的特征點。
在空間坐標(biāo)系中建立運動目標(biāo)的三維融合模型,如公式(6)所示。
式中:θe、ρe分別為基準(zhǔn)線的橫、縱坐標(biāo)。
在成像區(qū),以運動目標(biāo)的灰度特征為x軸重構(gòu)圖像目標(biāo),可以得到灰度特征,如公式(7)所示。
式中:EX(cs2)、EY(cs2)和EZ(cs2)分別為X、Y和Z方向上的灰度特征;h為邊緣像素集。
根據(jù)上述步驟可以得到全景視頻運動目標(biāo)的三維流行分布圖,如圖1 所示。
2.2 特征分析
當(dāng)提取目標(biāo)成像的特征值時,可以用矩陣T表示VR 全景視頻的虛擬成像模型,如公式(8)所示。
式中:T11、T12、T21和T22均為特征矩陣中的元素。
采用時頻特征分解法[8]對公式(8)進(jìn)行特征分解,根據(jù)特征重組步驟可以得到VR 全景視頻運動目標(biāo)成像的分布條件,如公式(9)~公式(12)所示。
式中:A為關(guān)聯(lián)規(guī)則集合;N為標(biāo)量序列的個數(shù);s、t為2 個二階特征量;κ(A)為分塊融合模型;P為調(diào)整系數(shù);ai為特征元素。
考慮全景視頻的灰度圖像,采用模糊信息融合法[9]對任意像素(x,y)進(jìn)行處理,得到VR 全景視頻運動目標(biāo)成像的拓?fù)浣Y(jié)構(gòu),如公式(13)~公式(15)所示。
式中:h為方向比;s為扁平度;v為橢圓長短半軸的和;θ為成像區(qū)的主方向角;λ1為成像區(qū)橢圓的長半軸長度;λ2為成像區(qū)橢圓的短半軸長度。
采用對稱分割法對運動圖像進(jìn)行分割處理,就可以得到該圖像的分塊融合模型,如公式(16)所示。
采用公式(16)就可以對目標(biāo)圖像進(jìn)行特征提取和追蹤識別。
3 全景視頻運動目標(biāo)精確追蹤
3.1 提取目標(biāo)特征
在運動目標(biāo)成像模型的基礎(chǔ)上,設(shè)計目標(biāo)精確追蹤的優(yōu)化算法,該文提出了一種基于VR 技術(shù)的全景視頻運動目標(biāo)精確追蹤方法。首先,對運動目標(biāo)的邊緣輪廓特征進(jìn)行提取。其次,利用角點跟蹤法進(jìn)行融合處理。最后,對運動目標(biāo)的圖像像素進(jìn)行進(jìn)一步融合。對Harris 角點來說,采用分塊檢測法進(jìn)行處理,得到運動目標(biāo)的像素集,通過特征匹配得到灰度鄰域,并對目標(biāo)成像進(jìn)行加權(quán)融合,提取其中的關(guān)聯(lián)信息,可以得到全序列特征量GD,如公式(17)所示。
式中:L為高斯尺度;I為全景視頻運動目標(biāo)的灰度值;di為特征元素。
對運動目標(biāo)進(jìn)行融合處理,并對其向量進(jìn)行量化編碼,得到的編碼集如公式(18)、公式(19)所示。
式中:ω為方向;ω0為初始方向;σr為方向關(guān)聯(lián)系數(shù);θ為角度;σθ為角度關(guān)聯(lián)系數(shù);j為編碼;J為編碼容量;θj為關(guān)聯(lián)規(guī)則特征集。
對目標(biāo)成像進(jìn)行加權(quán)融合,就可以得到其信息熵H'(X),如公式(20)所示。
式中:H為信息熵集合,Xt為信息熵集合中的元素。
利用灰度窗口進(jìn)行匹配,建立運動目標(biāo)特征分割模型,確定其融合特征Eθj(x),如公式(21)所示。
式中:Fθj(x)為水平融合特征集;Hθj(x)為垂直融合特征集。
采用時頻融合法對運動目標(biāo)的像素進(jìn)行特征分析,以提高對運動目標(biāo)進(jìn)行追蹤的準(zhǔn)確性。
3.2 輸出跟蹤目標(biāo)
對VR 全景視頻運動目標(biāo)的關(guān)聯(lián)特征量進(jìn)行提取,并對其進(jìn)行追蹤融合,得到運動目標(biāo)圖像的關(guān)聯(lián)算子,關(guān)聯(lián)特征集如公式(22)、公式(23)所示。
式中:δBT(F)(x,y)為關(guān)聯(lián)特征集;<(S,I)為條件“或”;>(S,I)為條件“與”;A(x,y)為特征量。
根據(jù)關(guān)聯(lián)映射F:E→R3,令特征集為T:E→PDS(2),得到運動目標(biāo)的高維分割張量模型(S,I),重構(gòu)后的全序輸出如公式(24)、公式(25)所示。
式中:Ai為分割后的張量;Aj為分割前的張量;h(S,I)為張量模型;S為張量元素。
對全景視頻運動目標(biāo)進(jìn)行梯度分解,得到相應(yīng)的梯度模型,對邊緣像素進(jìn)行重建,即可得到重建系數(shù)SP,如公式(26)所示。
式中:d為像素點間的距離。
根據(jù)上述步驟,基于VR 技術(shù)對全景運動目標(biāo)的特征量進(jìn)行提取,在虛擬仿真模型中實現(xiàn)運動目標(biāo)的精確追蹤和準(zhǔn)確識別,得到優(yōu)化輸出如公式(27)所示。
式中:T為優(yōu)化后的特征點集;B為特征點集。
4 仿真分析
為了驗證該文提出的全景視頻運動目標(biāo)精確追蹤方法的實用性,采用仿真試驗進(jìn)行驗證,將圖片的像素值設(shè)置為120 px,運動目標(biāo)的最大迭代次數(shù)設(shè)置為300 次,利用高分辨率光譜分析儀進(jìn)行視頻采樣,在Vega Prime 平臺中進(jìn)行運動目標(biāo)跟蹤識別。其中,像素值a1=(0.4,0.9,0.9)、a2=(0.6,0.7,0.6),特征分割系數(shù)α=0.35,關(guān)聯(lián)系數(shù)σ=0.41,圖像匹配系數(shù)β=0.32,分割張在不同幀數(shù)下全景視頻運動目標(biāo)追蹤結(jié)果如圖2 所示。
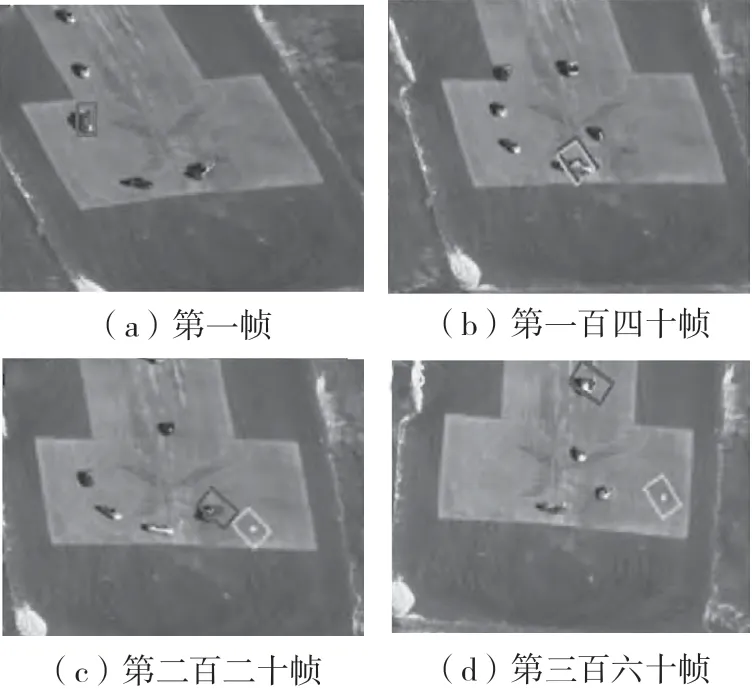
圖2 不同幀數(shù)下全景視頻運動目標(biāo)精確結(jié)果
從追蹤結(jié)果上來看,該文提出的基于VR 技術(shù)的全景視頻運動目標(biāo)精確追蹤結(jié)果較好,能夠很好地識別追蹤目標(biāo)的特征。采用ITV 跟蹤方法進(jìn)行對比,對比結(jié)果如圖3 所示,由圖3 可知,當(dāng)追蹤目標(biāo)不超過3 個時,該文提出的方法與增量視覺跟蹤法(ITV)的效果一致。當(dāng)追蹤目標(biāo)較多時,該文提出的方法進(jìn)行運動目標(biāo)追蹤的精度更高。

圖3 WPA 優(yōu)化結(jié)果
5 結(jié)語
該文提出了一種基于VR 技術(shù)的全景視頻運動目標(biāo)精確追蹤方法,通過提取運動目標(biāo)的邊緣輪廓特征來建立VR 全景視頻運動目標(biāo)融合模型,利用像素排序方法對運動目標(biāo)的特征進(jìn)行重組,采用分塊檢測法進(jìn)行處理,根據(jù)特征匹配結(jié)果得到灰度鄰域,并對目標(biāo)成像進(jìn)行加權(quán)融合,提取其中的關(guān)聯(lián)信息,實現(xiàn)了在虛擬仿真模型中精確追蹤和準(zhǔn)確識別運動目標(biāo)的目標(biāo)。仿真分析結(jié)果表明,該文提出的基于VR 技術(shù)的全景視頻運動目標(biāo)精確追蹤結(jié)果較好,能夠很好地識別追蹤目標(biāo)的特征,獲得更高的追蹤精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
