復雜裝飾景觀塔工程三維掃描測量技術應用分析
2023-06-07 14:30:22靳文強
中國新技術新產品 2023年6期
靳文強
(中鐵二局集團裝飾裝修工程有限公司,四川 成都 610031)
0 引言
隨著社會經濟的快速發展及城市化建設步伐加快,城市建筑也呈現豐富多樣的發展趨勢,越來越多的異形復雜構筑物出現在人們的周圍,滿足人們對藝術和生活的高品質追求。同時給實際工程的建造也帶來了巨大的挑戰,建筑是否能還原最初設計的樣子,裝飾工程測量、施工等技術的應用發揮了巨大的作用。裝飾專業傳統的測量方式采用全站儀進行工程測量,空間中每個點位都需要測量人員進行單點檢測,點與點之間的移動全靠測量人員,由于測量效率低、精度差、外業時間長和工作強度高等方面不足,測量的準確性很大程度上取決于施工人員的水平。針對復雜裝飾景觀塔,這類工程的定位難度大、復測困難,較難保證施工質量,一旦出現偏差很難進行補救[1],同時會消耗大量的人力、物力,難以達到既定的要求。傳統測量方式已經無法滿足日益復雜多樣的建筑造型和綠色建造的發展需求。針對這類復雜裝飾造型采用裝飾景觀塔三維掃描技術解決方案。采用三維掃描技術結合BIM 技術的施工測量技術研究,在指導復雜裝飾景觀塔落地實施過程中提供一些理論依據。
1 三維激光掃描技術的介紹及優勢
三維激光掃描技術是新型技術,三維掃描儀利用激光測距原理,通過記錄被測物體表面大量點的三維坐標、反射和紋理等信息,可以快速地復建掃描目標的三維模型及線、面、體等各種數據[2]。從傳統全站儀的單點測量轉化為面的測量。這項技術最早主要應用于文物保護及犯罪現場等數據采集等工作,越來越多的異型建筑逐步引入建筑行業。針對常見的復雜裝飾景觀塔工程的特點,主體多位空間圓管鋼結構曲線,傳統的軸線及標高并不適用這類項目,無法對結構主體進行全面測量,影響裝飾施工單位對主體鋼結構的數據采集工作。使用三維掃描技術,使測量技術不再受建筑類型及空間曲線等方面的制約,也只有通過三維激光掃描技術進行全方位掃描才能為后續裝飾施工提供數據基礎。
2 應用流程分析
針對主體采用全鋼結構的裝飾景觀塔造型復雜,需要先分析整體施工流程,主要包括空間坐標體系的創建、數據采集分析與處理、測量數據與BIM 模型結合應用等環節。
3 空間坐標體系構建
一般情況下,在傳統的裝飾施工現場采用的坐標系是由業主提供的勘測3 個首級控制點坐標供施工單位使用,該坐標通常采用大地坐標系,坐標數值較大,在常用的CAD 及BIM 建模軟件中沿用該大地坐標系會超出作圖范圍。通常采用2 種方法解決這個問題:1)縮減固定值法。由于大地坐標系數值非常大,尤其是X值和Y值,那么就將X/Y同時減去一個固定值,這個固定值是大地坐標系的前幾位數構成的,這樣就可以大大減少X/Y的數值大小,關于Z值,一般情況下Z值往往不大,如果過大,超出模型控制范圍,就可以減掉一個固定值,注意這個固定值可以不同于X/Y方向的固定值。2)重建小坐標系,將原大地坐標系的首級控制點中的某個點作為坐標原點,再通過其余2~3 個首級控制點進行計算,重新構建三維坐標系,它包括原點、X軸、Y軸、Z軸。該景觀塔塔高69.8 m,結構采用鋼管斜網柱,由圓管組合成菱形單元編織而成,內側采用桁架式弧形平臺鋼結構單元組合而成,塔體中部采用核心筒結構,BIM 模型組合單元如圖1 所示。
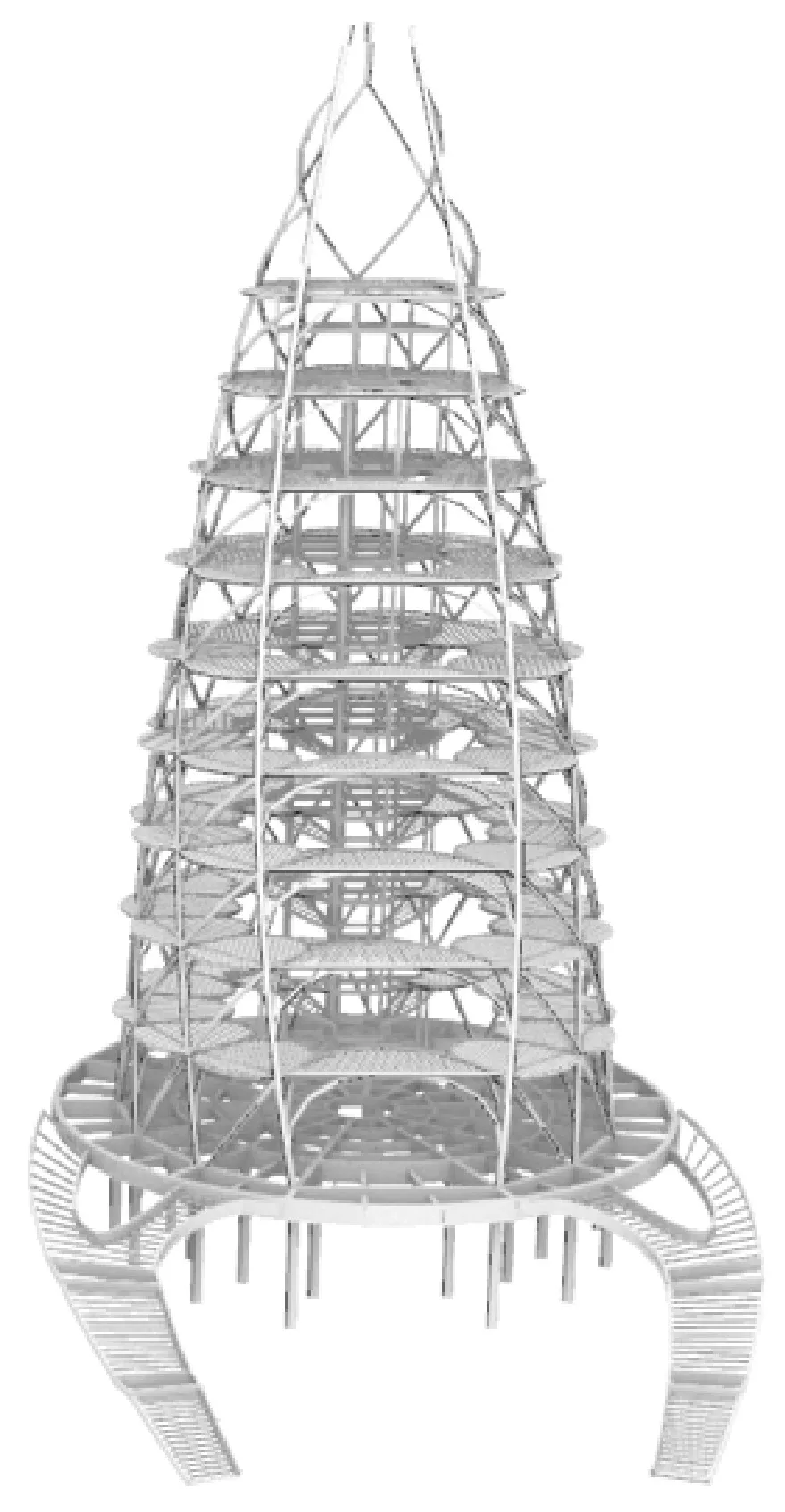
圖1 BIM 模型組合單元圖
該項目采用的是重建小坐標體系以滿足復雜造型裝飾景觀塔工程施工,首先根據總承包單位移交的不少于3 個首級控制點,在整個測控區內引出布置16 個施工測量控制點,形成裝飾景觀塔工程測量體系,對構件進行全覆蓋測量,保證整個建筑物在創建的裝飾坐標體系中,坐標系創建完成后,在BIM 軟件中確定三維坐標體系建立BIM 模型,方便將BIM 模型與現場共用同一坐標體系,將BIM 模型與現場數據進行交互。空間坐標體系點位布置如圖2 所示。

圖2 空間坐標體系點位布置圖
4 數據采集分析與處理
針對復雜裝飾造型景觀塔項目,采用三維激光掃描技術需要對整個項目進行外業掃描工作和內業掃描數據的分析與處理工作。
4.1 外業測量控制
項目采用法如FARO Focus 350,三維激光掃描儀,基于點云三維方式獲取目標三維數據,采集過程為非接觸式,可遠程遙控操作,激光采集速度為976 000 點/s,每站測量2 min~5 min,最大掃描距離為350 m,視角范圍水平360°,垂直300°。1)原點設置。使三維激光掃描的點云數據在裝飾坐標體系中,須全站儀在掃描過程中進行打點將掃描儀的空間點位融合到坐標體系中,方便后期數據直接與BIM 模型直接合模。2)儀器站點規劃。按照設站規劃將設站網絡最優布置,爭取以最小的設站數量獲得最大的覆蓋面積(保證采樣率的前提下),減少拼接次數,提高拼接精度,減少累計誤差。3)標靶球布設。擺放參考球,參考球與儀器之間應當通視,從儀器旋轉鏡片中心角度觀察來確認參考球是否通視2、修改為:參考球與儀器之間應當通視,從儀器旋轉鏡片中心角度觀察來確認參考球是否通視。參考球的距離根據掃描儀分辨率設置確定,對小范圍區域應將參考球均勻分布在區域四周。參考球擺放應穩定,不會因為風吹或震動而發生晃動。棱鏡應與全站儀進行協作保證掃描坐標體系互通。4)儀器準備完畢后,首先建立工程掃描文件夾,記錄掃描日期時間,查看掃描儀水平傾角儀以確保掃描儀器盡量水平放置,建議每站都檢查水平傾角儀并整平。根據現場情況及后期處理結果需求設定合適的分辨率及質量,該項目由于工期緊張,結構通體為鋼結構材料,異型圓管曲線造型,施工焊接等擾動較大,在整體掃描前,要求整體施工作業暫停,從掃描的核心目的出發,采用高精度控制掃描,站點架設密集,未采用彩色掃描模式,大幅提高每站掃描的時間。5)按鍵掃描前先將掃描區域附近人員勸離至參考球和重點掃描區域范圍外,并防止震動等外力對掃描數據結果產生影響。6)檢查數據。查看掃描結果是否正常,參考球以及棱鏡球是否在測量范圍內,是否有過往的行人遮擋被測區域。7)儀器搬動至下一站,以推進的方式擺放參考球,確保與下一次測站之間有至少3 個公共的參考球,布設相應標靶球。
4.2 內業數據分析與處理
通過數據采集目標的外形表面的三維坐標點云數據,然后對獲得點云數據進行處理,可重新構建物體的三維模型。根據項目具體精度要求及實際情況對點云數據進行測站拼接、點云數據處理、剔除多余數據,并整體進行降噪,保證局部數據密度統一,再根據需求進行提取數據或創建實體模型。數據處理流程如圖3 所示。

圖3 數據分析處理流程
4.3 點云測點數據拼接
將不同測站的掃描數據校準到統一的坐標系統中,相鄰站點之間通過3 個及以上的公共同名點,才能快速進行點云模型的拼合及數據分析,這個過程稱為點云拼接。
4.4 數據剔除、降噪、點云密度統一
在實際工程中,由于掃描過程中外界環境因素對掃描目標的阻擋和遮掩,例如掃描過程中移動的車輛、行人、樹木的遮擋以及建筑物本身的反射特性不均勻,導致最終獲取的掃描點云數據內可能包括不穩定的點和錯誤的點,這些影響將導致點云數據含有偏差[3]通過剔除、降噪的目的過濾掉表面一些多余的數據,使點云噪點更小。對凹凸不平的表面或有較多粉塵的表面,噪點尤為突出,數據處理過程中不可或缺的一步。點云原始數據如圖4 所示。
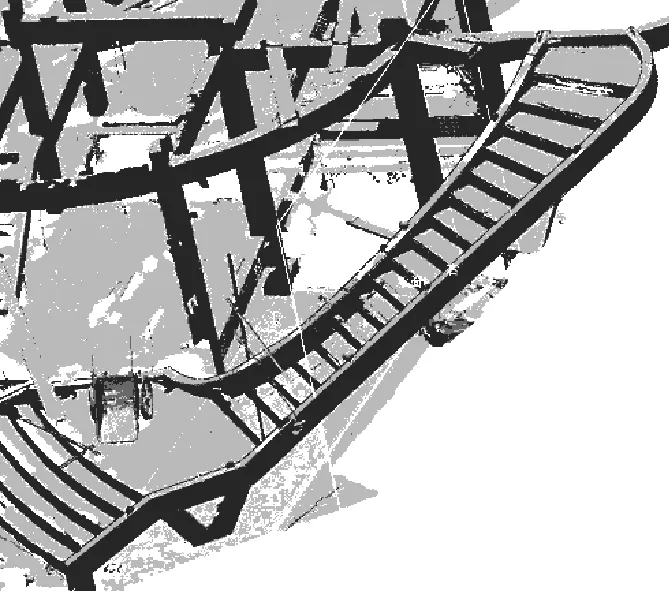
圖4 點云原始數據
5 測量數據的應用分析
5.1 基于點云數據重建模型
三維掃描技術點云數據在裝飾工程中應用的方向主要包括關鍵技術控制點提取和依賴整體模型重構完整點云數據應用。該項目結構造型復雜,空間曲線偏差分析復雜全面,要求水平高,對裝飾構件的影響較大,必須采用模型重建技術手段。對點云數據的剔除、降噪、點云密度統一后得到比較完整的點云數據,整體進行高精度掃描后的點云數據體量較大,數據大小是以GB 來衡量的,該項目整體掃描數據體量達到100 GB 以上,為了更好地應用數據,根據項目自身的需要對點云數據進行抽稀,模型擬合,模型擬合一般分為2 種:1)采用掃描設備自帶軟件的擬合建模,這種方法針對傳統常規的幾何形式建筑及偏差不大的點云數據可以大幅提高模型重建的效率。2)針對軟件及人工組合式的擬合模式,針對復雜空間鋼結構景觀塔項目,曲線造型偏差及走向并不可控,完全通過軟件處理,無法滿足精度和應用要求,采用軟件及人工組合的精細化模型重構手段,多次與原始點云比對,進行重建偏差分析,達到最終可使用的精度級別。點云模型重建輸出格式有很多,不同格式轉化有一定的不穩定因素和偏差,經過項目反復測試,采用的stp 文件通用格式,數據使用會更精準,信息丟失最小,這種文件格式目前適用于主流三維模型軟件,包括犀牛、REVIT 以及Catia 等,數據更準確。
5.2 數據重構與BIM 模型進行分析
將處理后的掃描模型與BIM 理論模型進行數據比對,全面解決空間三維鋼結構偏差影響裝飾及相關專業的問題,為深化設計材料下料、定位安裝提供數據基礎。可以快速判斷現場主體鋼結構安裝完成后的實際偏差,從而指導主體結構施工單位進行現場整改。將主體鋼結構安裝偏差控制在允許范圍內,裝修及相關專業有了準確的現場實測數據后,就可以大規模進行設計施工優化及材料下單,相關措施也可以提前進場準備,大幅提升整體項目的速度,保證裝修等相關專業快速、高質量完成。
5.3 正向測量數據應用
掃描數據和BIM 模型優化完成后,通過模型數據直接提取三維空間點位數據,進行施工放樣,16 個控制樁位環景觀塔一周,用全站儀或放線機器人進行安裝定位,輔助現場安裝指導。
6 結語
對復雜裝飾景觀塔的測量技術的研究,可以針對復雜裝飾造型類項目帶來一些有價值的技術路線應用分析實踐,與傳統測量方式相比,大幅度提升人工測量的效率、精度、數字化技術應用能力,降低裝飾工程施工難度,在縮短工期、節約人力、材料成本等多方面體現出絕對的優勢,通過三維激光掃描技術和BIM 技術融合解決測量復雜造型的難題,也更好地為裝飾施工企業提供技術和質量保障。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
現代裝飾(2021年6期)2021-12-31 05:27:54
小學科學(學生版)(2020年12期)2021-01-08 09:28:10
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
少年漫畫(藝術創想)(2020年12期)2020-06-09 05:50:08
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19