秸稈收集機撿拾器仿真優(yōu)化設計*
2023-06-05 01:31:46楊杰張征古冬冬王一言關陽仵峰
中國農(nóng)機化學報 2023年5期
楊杰,張征,古冬冬,王一言,關陽,仵峰
(1. 華北水利水電大學機械學院,鄭州市,450046;2. 華北水利水電大學水利學院,鄭州市,450046)
0 引言
玉米是我國主要糧食作物,2022年我國玉米種植面積為4.02×107hm2,產(chǎn)量達2.59×108t,玉米收獲后會產(chǎn)生大量的秸稈剩余,玉米秸稈有多種利用方式,其自身富含營養(yǎng),可作為畜牧業(yè)的飼料來源,可以借助致密成型技術將其壓縮成塊狀作為取暖材料或進行生物質(zhì)發(fā)電[1]。但目前玉米秸稈利用率總量≤30%,剩余大量秸稈只能棄之田間地頭被焚燒或自行腐爛,造成資源的巨大浪費,究其原因是玉米秸稈產(chǎn)量龐大,沒有較好的設備能夠?qū)⑵湎到y(tǒng)的回收并運輸。
秸稈收集機作為近些年收集回收農(nóng)作物秸稈的重要機械[2],其關鍵部件撿拾器的工作性能直接影響著秸稈的利用效率,而撿拾刀具種類選擇和在刀輥上的排布方式對秸稈收集效率有重要影響,祝英豪等[3]通過土槽試驗對秸稈收集機刀具外形參數(shù)進行優(yōu)化,在不降低秸稈埋覆效果的情況下功耗降低10.05%;劉鵬等[4]通過對比撿拾器不同轉速情況下運動過程和受力變化規(guī)律,發(fā)現(xiàn)在碎稈破碎長度合格時,增大粉碎刀軸轉速不利于拋撒均勻度提升,且作業(yè)功耗上升較大。因此研究優(yōu)化秸稈收集機撿拾器的結構與運動參數(shù)非常關鍵。
本研究在4JQH-120秸稈收集機的基礎上,設計了3種適用于該機型的撿拾器,分別對其進行模態(tài)分析、離散元-多體動力學仿真,對比分析得到收集質(zhì)量更優(yōu)的撿拾器刀具類型及排布方式。
1 整機結構及工作原理
1.1 整機結構
如圖1所示,秸稈收集機主要由破傳動裝置、懸掛裝置、撿拾裝置、輸送裝置和風機收集裝置等組成。

圖1 秸稈收集機
1.2 工作原理與主要技術參數(shù)
秸稈收集機通過三角懸掛掛靠在拖拉機后方,依靠拖拉機后輸出軸提供動力。作業(yè)時,平鋪在田間的玉米秸稈經(jīng)撿拾器撿拾并破碎拋送至后方輸送攪龍,經(jīng)輸送攪龍旋轉橫向運輸將秸稈物料輸送至左側風機處,然后秸稈物料經(jīng)風機鼓風作用對其進行再次破碎并通過導流道將破碎后的秸稈輸出。一般在出料口有農(nóng)用三輪車或其他裝貨車輛收集破碎后的玉米秸稈。該秸稈收集機的主要技術參數(shù)如表1所示。
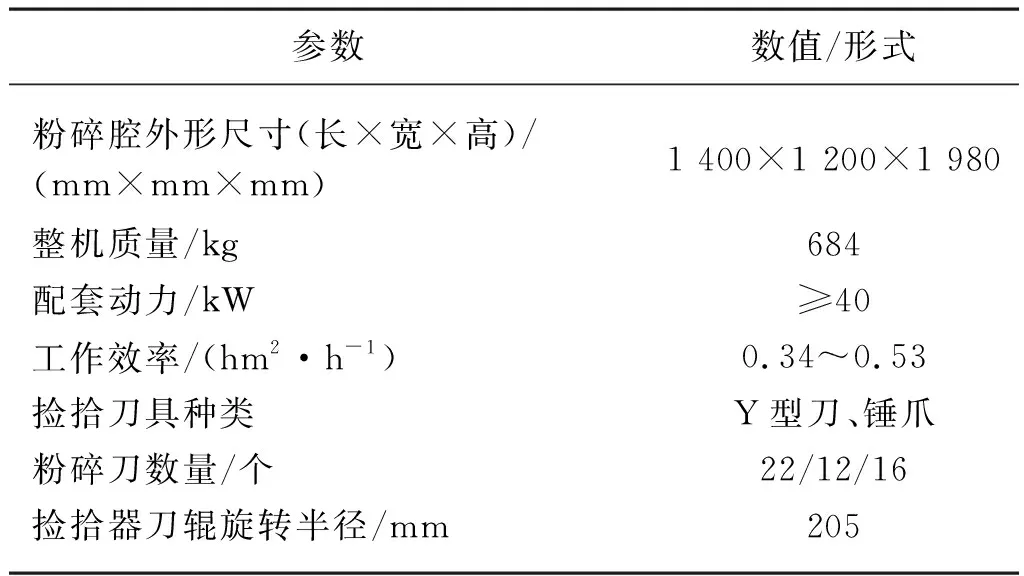
表1 玉米秸稈收集機的主要參數(shù)Tab. 1 Main parameters of corn stover collector
2 撿拾器設計
2.1 撿拾刀具選擇
目前,市面上常見玉米秸稈撿拾刀主要有錘爪式、“Y”型刀和直型刀三種[5],如圖2所示。其中錘爪式撿拾刀,處于高速旋轉時的錘爪掃過的橫截面積大,撿拾效果良好,但占用刀輥表面積大,動力消耗大,且對秸稈破碎效果較差;直型撿拾刀,高速旋轉時受風阻橫截面積較錘爪大大縮小,動力消耗小,秸稈粉碎效果好,但容易損壞;“Y”型撿拾刀,是在直型刀基礎上對其進行改進,在直型刀原有優(yōu)點基礎上,撿拾效果方面也有所提升。
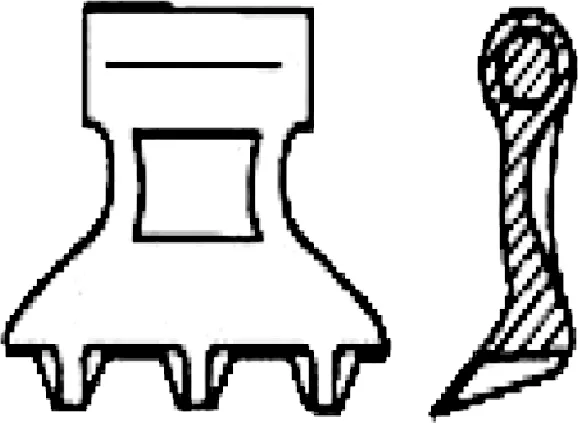
(a) 錘爪

(b) 直型刀
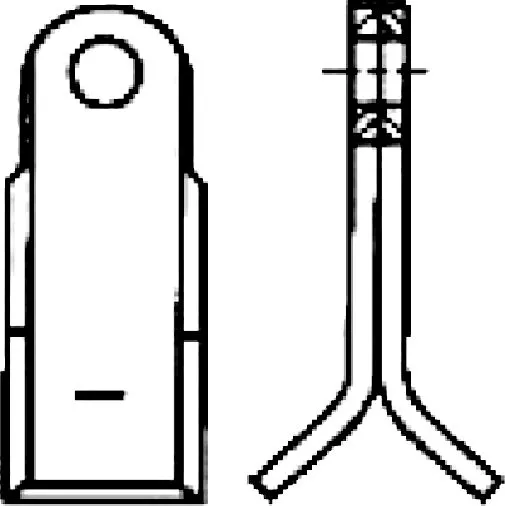
(c) “Y”型刀
s
2.2 撿拾刀具布置
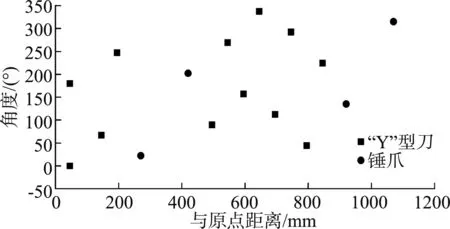
本文在前人多次試驗的基礎上,綜合考慮決定采用以下排布方式進行試驗分析。全為“Y”型刀的雙螺旋排布,以下簡稱Y撿拾器;刀具為錘爪和“Y”形刀混裝的雙螺旋排布,以下簡稱YC撿拾器;刀具為錘爪和“Y”形刀對稱混裝的螺旋排布,以下簡稱DC撿拾器。各撿拾器的刀具排布展開圖如圖3所示。
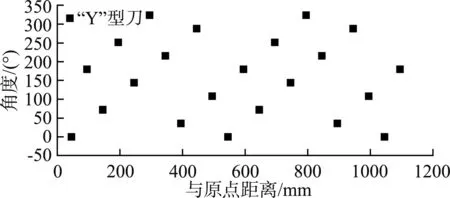
(a) Y撿拾器

(b) YC撿拾器
(c) DC撿拾器
2.3 撿拾器模態(tài)分析
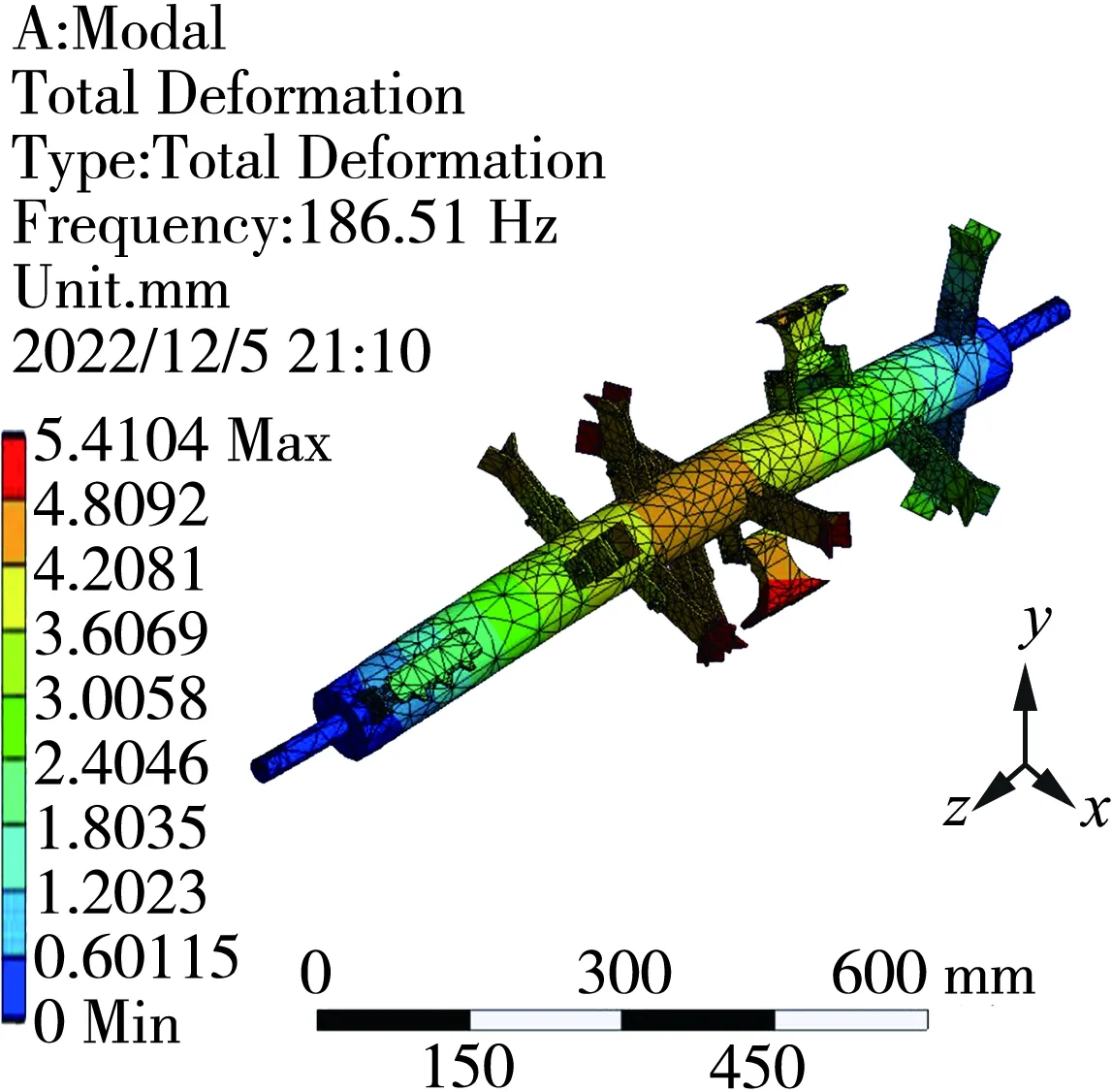
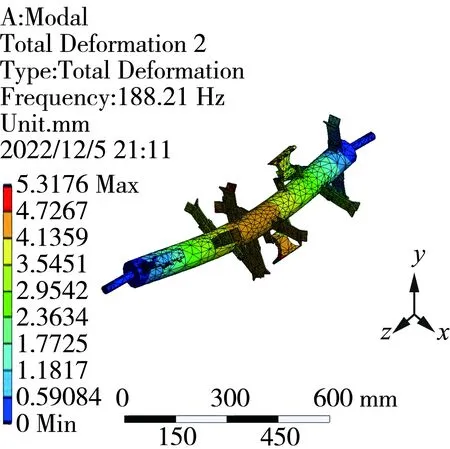
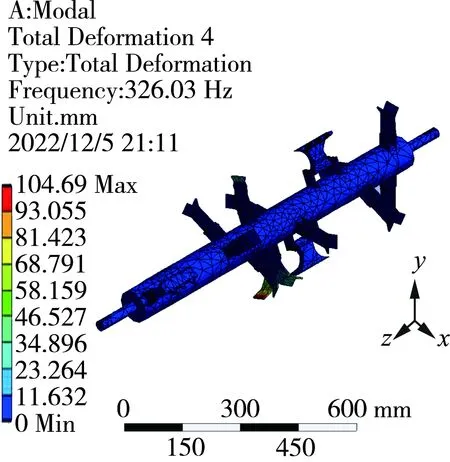
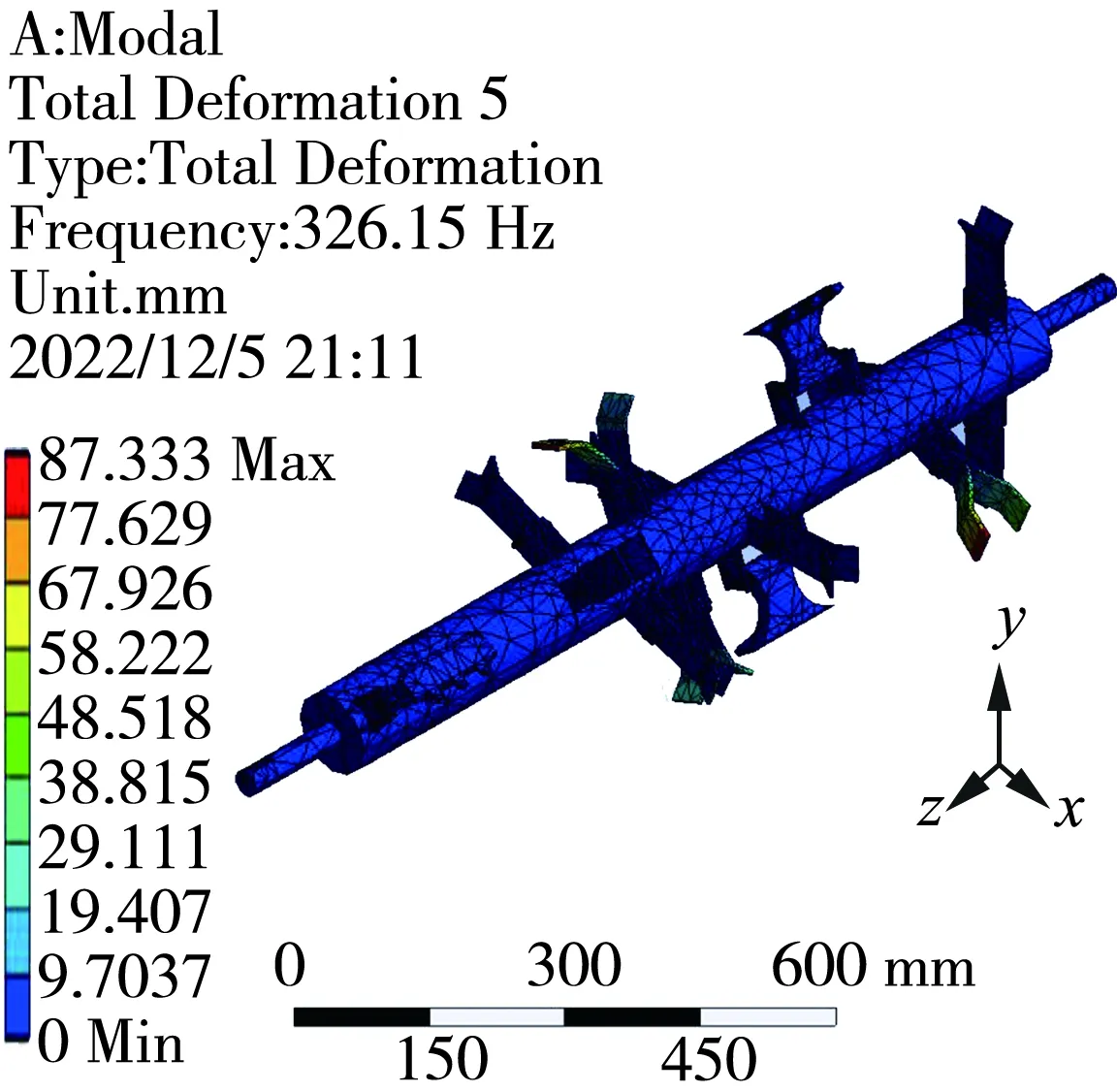
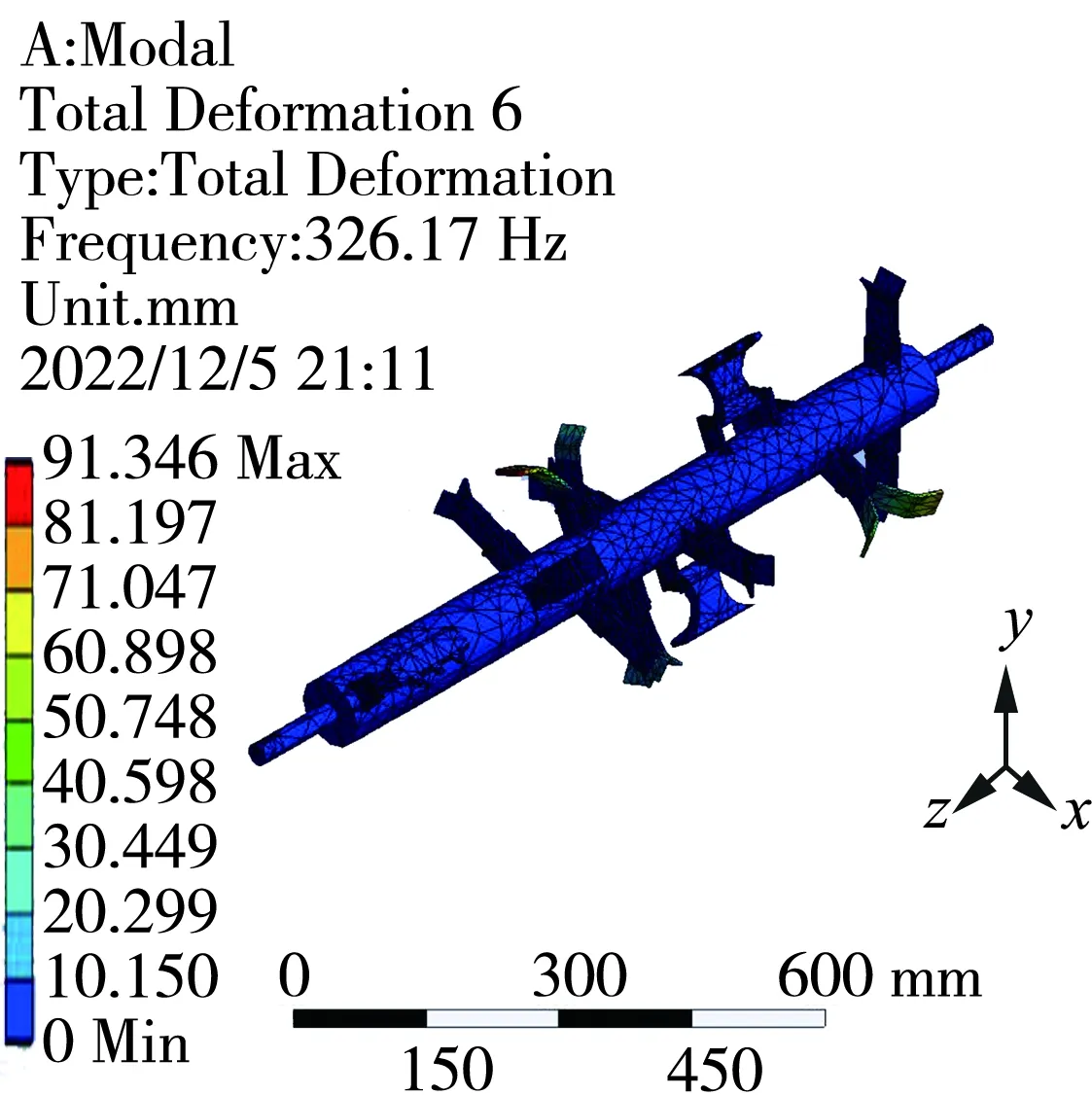
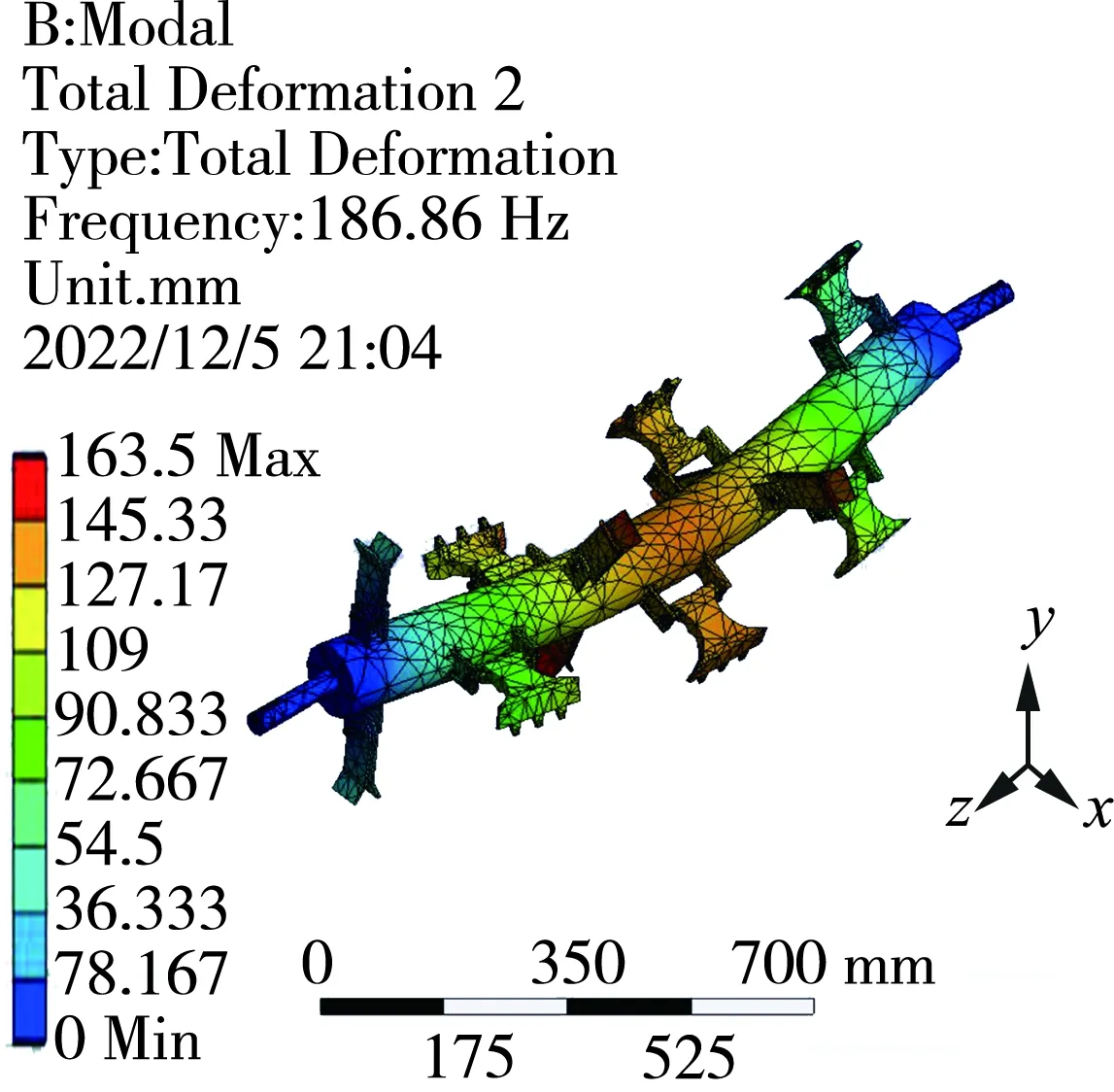
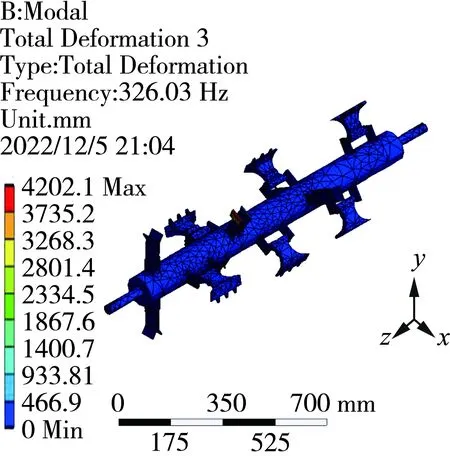
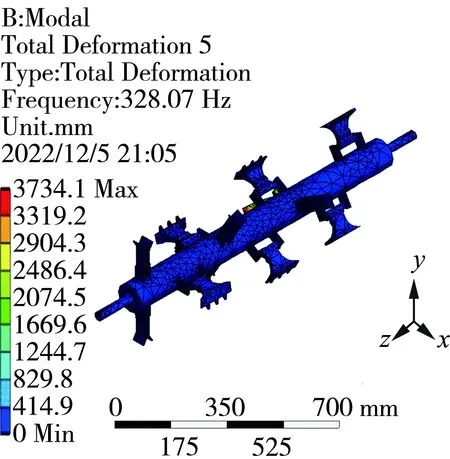
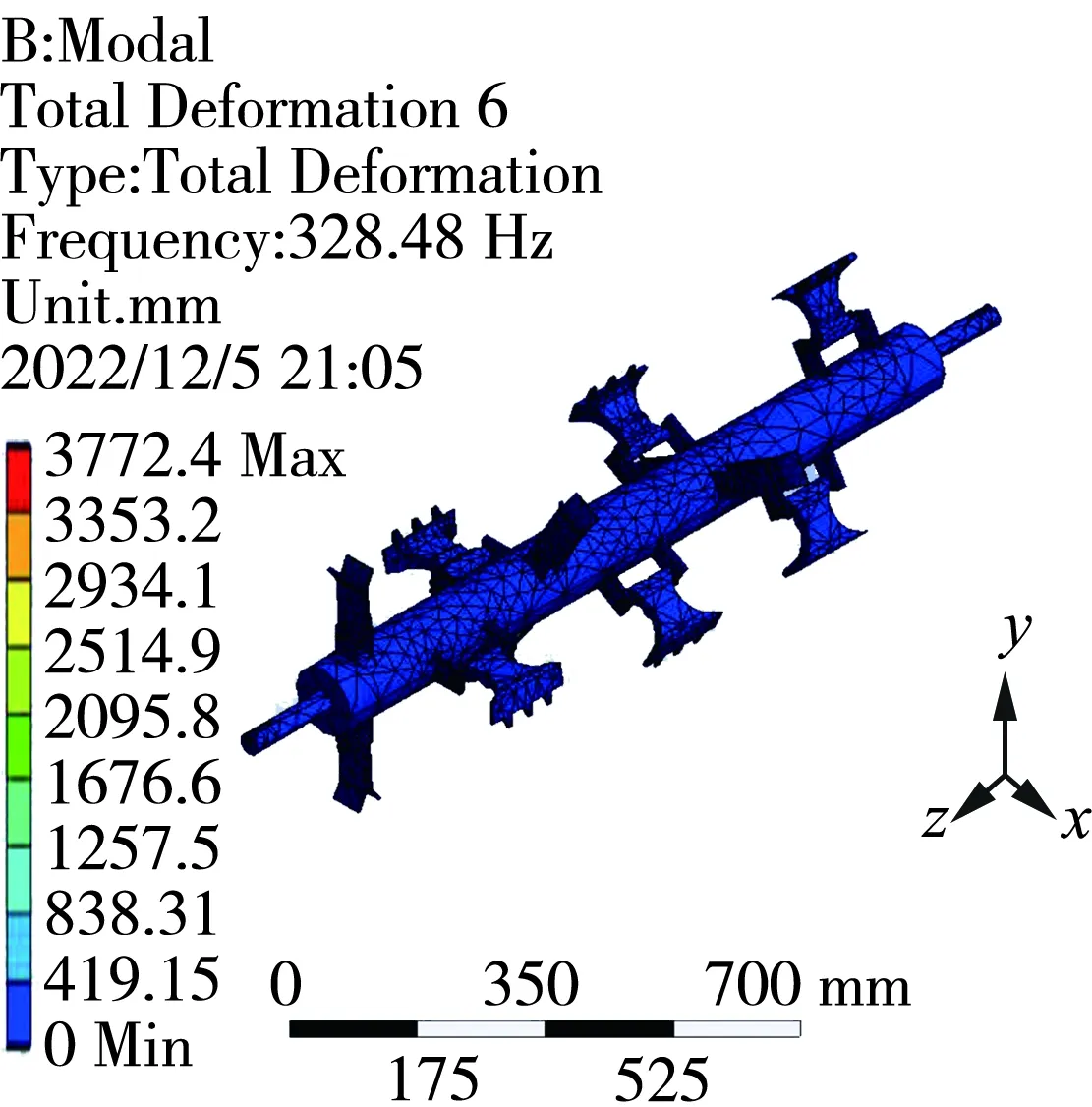
秸稈收集機在工作過程中,撿拾器高速轉動會導致機具發(fā)生震動[6],為保證機具的穩(wěn)定運行,基于ANSYS對各撿拾器進行模態(tài)分析,分析刀輥的模態(tài)屬性與震動頻率的關系。
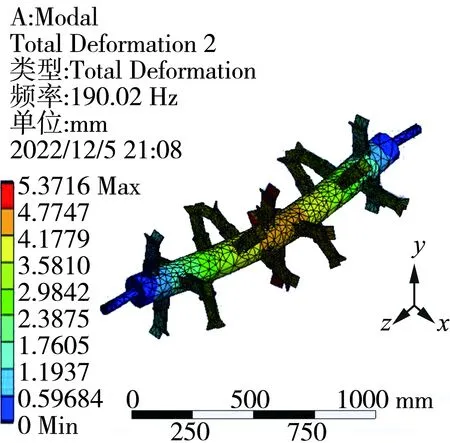
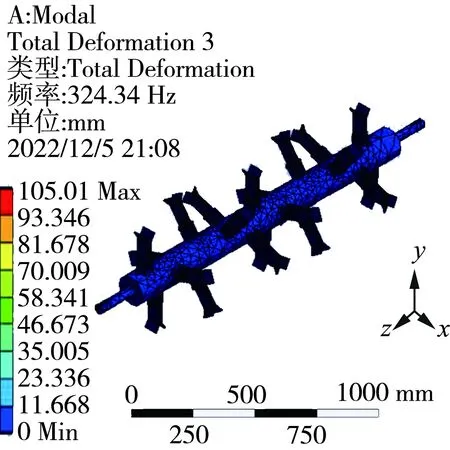
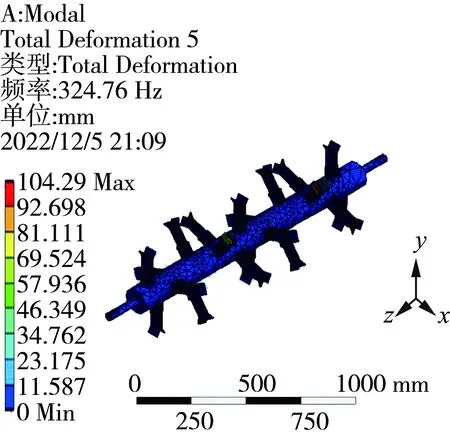
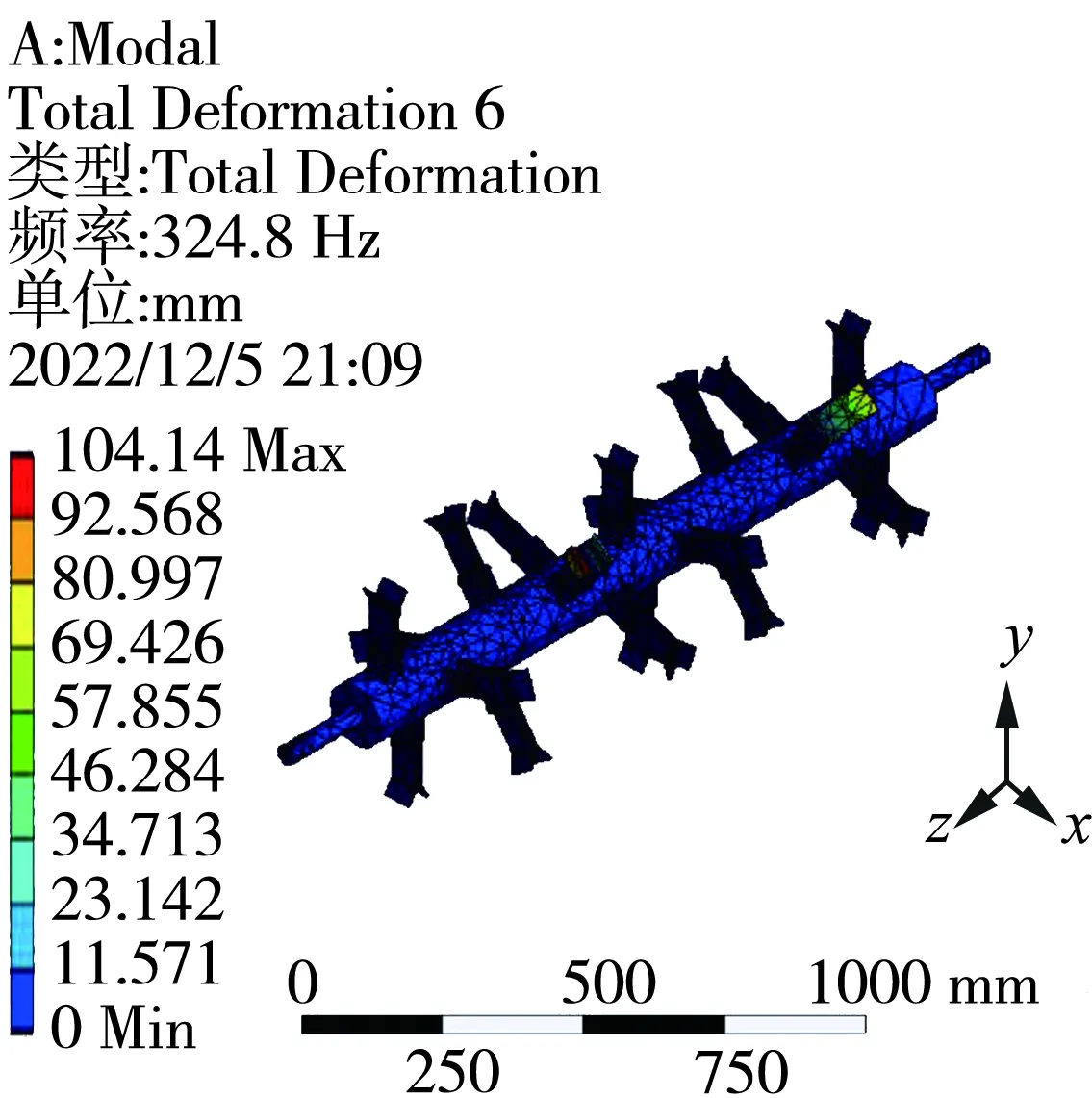
模態(tài)分析設置取1~10階,提取前6階固有頻率和振型進行分析[7],固有頻率結果如表2所示,振型結果如圖4~圖6所示。3種撿拾器均在前2階模態(tài)振型中,撿拾器彎曲變形較大,該型號還田機撿拾器的試驗轉速為1 900~2 300 r/min,得到其對應頻率為31.67~38.33 Hz,與最低階數(shù)的固有頻率(186.09 Hz)相比相差甚遠,不會導致共振的產(chǎn)生。
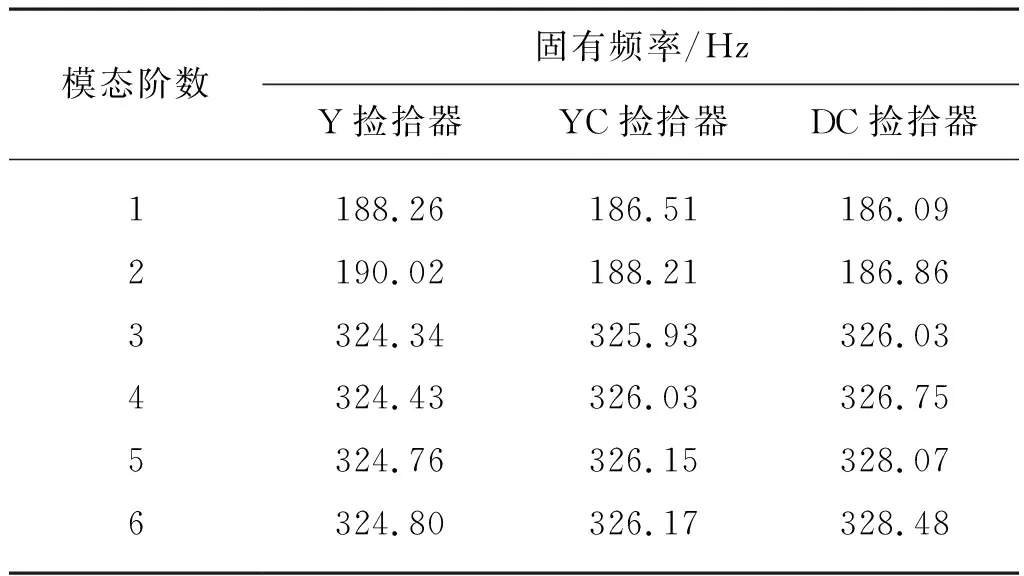
表2 三種撿拾器前6階模態(tài)的固有頻率Tab. 2 Natural frequencies of the first 6 modes of the three pickers
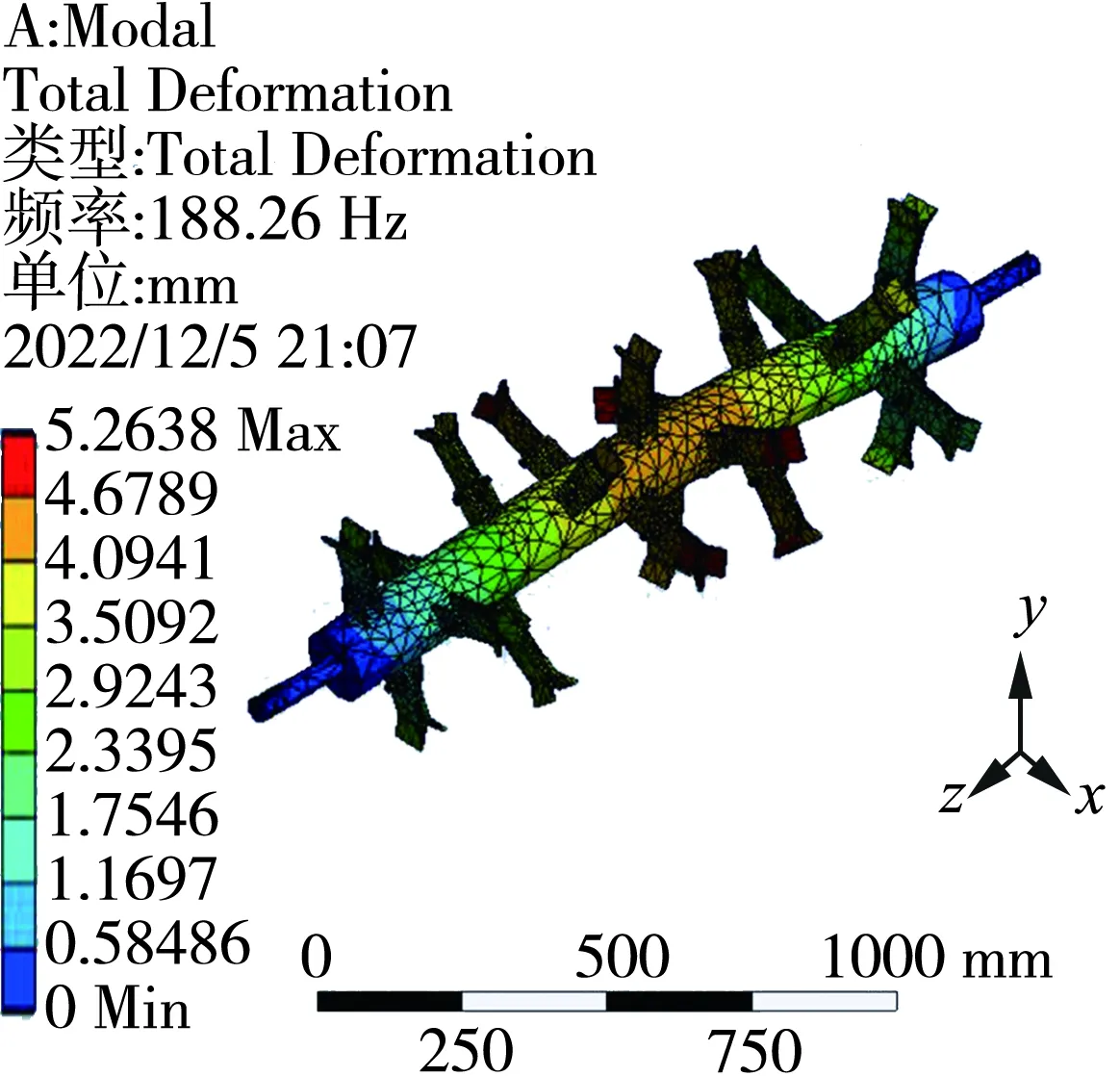
(a) 1階陣型
(b) 2階陣型
(c) 3階陣型

(d) 4階陣型
(e) 5階陣型
(f) 6階陣型
(a) 1階陣型
(b) 2階陣型

(c) 3階陣型
(d) 4階陣型
(e) 5階陣型
(f) 6階陣型

(a) 1階陣型
(b) 2階陣型
(c) 3階陣型

(d) 4階陣型
(e) 5階陣型
(f) 6階陣型
3 撿拾器刀具EDEM-RecurDyn耦合仿真分析
RecurDyn具有豐富的約束類型和力的施加形式,非常適合于求解大規(guī)模的多體系統(tǒng)動力學問題[8]。EDEM可用于工業(yè)生產(chǎn)中的顆粒處理及其制造設備的生產(chǎn)過程的仿真和分析,可利用EDEM輕松快速地創(chuàng)建顆粒實體的參數(shù)化模型,但軟件自身所能實現(xiàn)運動形式較為簡單[9]。在進行運動形式復雜模型仿真時,通常借助Adams、RecurDyn等多體動力學軟件輔助分析[10]。
根據(jù)撿拾器種類、行駛速度和撿拾器轉速設計正交表如表3所示。
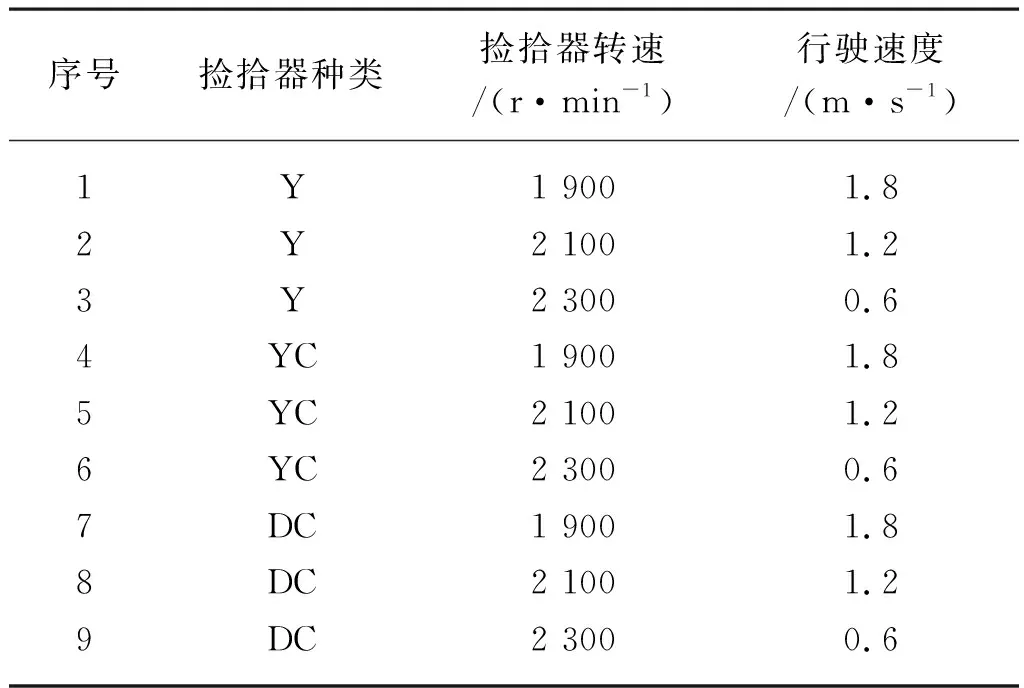
表3 撿拾裝置仿真試驗正交設計Tab. 3 Orthogonal design of picking device simulation test
3.1 撿拾裝置多體動力學建模
利用SolidWorks分別裝配搭載3種撿拾器的撿拾裝置三維模型,主要包括破碎腔和撿拾器,如圖7所示。將三維模型另存為“.step”格式導入RecurDyn中,對其添加相關約束、驅(qū)動等如表4所示。

表4 RecurDyn參數(shù)設置Tab. 4 Parameter setting in RecurDyn
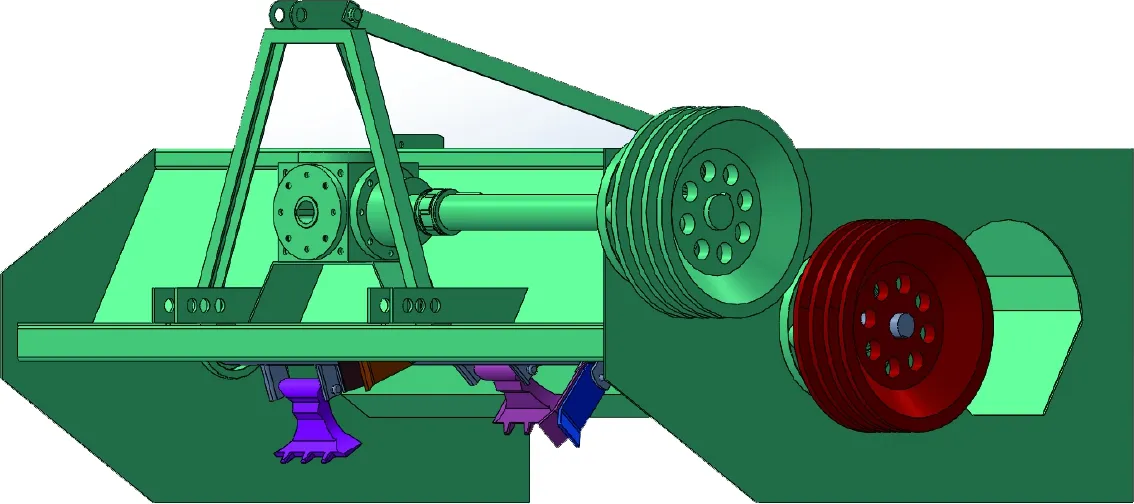
圖7 撿拾裝置三維模型
在添加完所有運動副之后,對“破碎腔-大地”移動副添加平移驅(qū)動,對“刀輥—破碎腔”旋轉副添加旋轉驅(qū)動,然后對撿拾刀和刀輥之間添加接觸力。最后將所有零部件添加成為wall并導出[11]。
3.2 EDEM參數(shù)設置
玉米收獲機切割后的玉米秸稈長度在0~80 mm之間不等,主要集中在45~60 mm,見表5[12]。
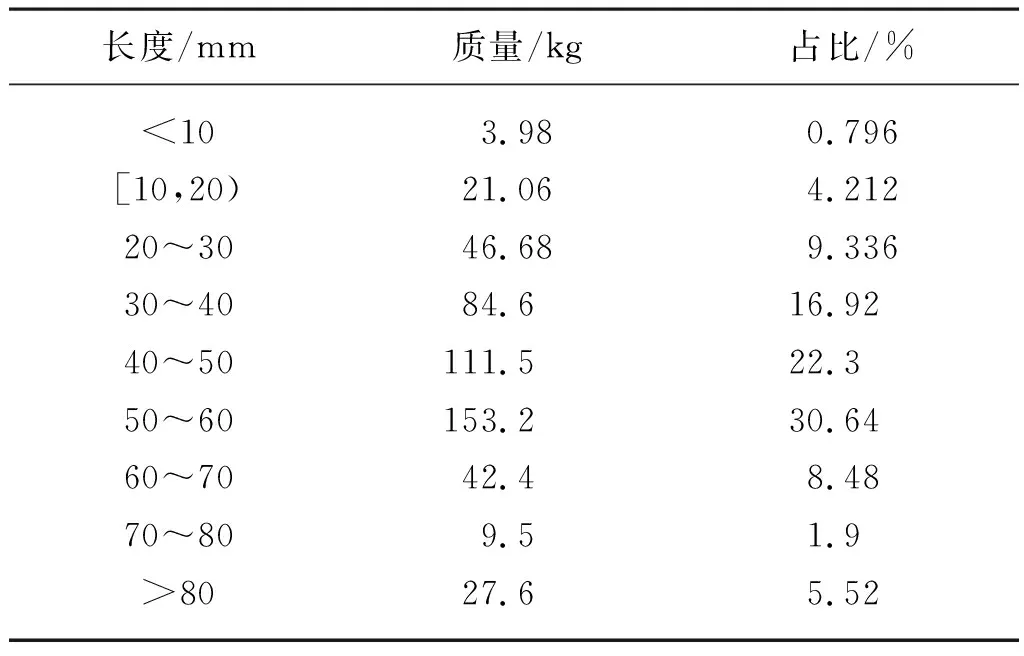
表5 玉米收獲機切割后的玉米秸稈長度分布Tab. 5 Corn stover length distribution after cutting by corn harvester
首先設置秸稈物料和撿拾裝置模型材料屬性,主要包括材料泊松比、密度和彈性模量,如表6所示,各材料間接觸參數(shù)如表7所示[13]。
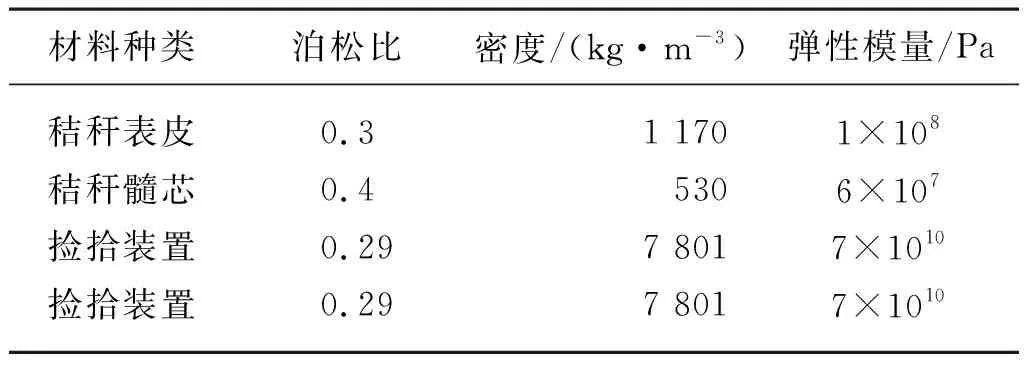
表6 材料屬性設置Tab. 6 Material property settings
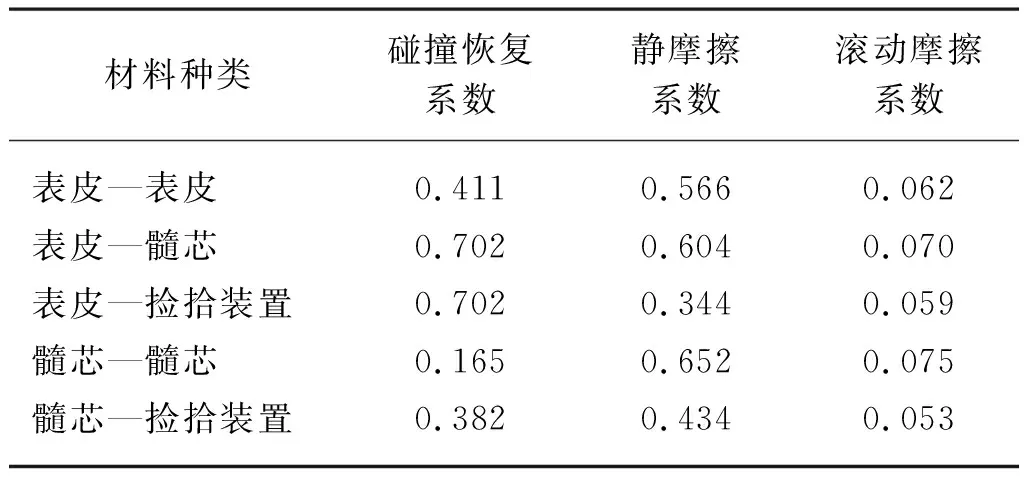
表7 材料間接觸參數(shù)Tab. 7 Material-to-material contact parameters
采用SolidWorks建立秸稈截面圖形,利用SolidWorks宏命令提取對應坐標參數(shù),將坐標導入EDEM,采用mate-particle功能將玉米秸稈表皮和髓芯的填充顆粒綁定在一起,為簡化仿真模型,秸稈長度設36 mm、46 mm、56 mm三種長度段,分別占20%、35%、45%,其中36 mm長度秸稈由70個半徑為1 mm 的小球和418個半徑為2 mm的小球填充而成,46 mm長度秸稈由91個半徑為1 mm的小球和528個半徑為2 mm的小球填充而成,56 mm長度秸稈由112個半徑為1 mm 的小球和638個半徑為2 mm的小球填充而成,生成BPM模型,各小球通過粘結鍵形成一個整體,如圖8所示[14]。

(a) 36 mm秸稈

(b) 46 mm秸稈

(c) 56 mm秸稈
在生成各個長度段秸稈顆粒模型后,在physics-particle to particle中選擇bonding V2粘結模型,分別設置表皮—表皮、表皮—髓芯、髓芯—髓芯之間粘結參數(shù),各粘結參數(shù)如表8所示[15]。
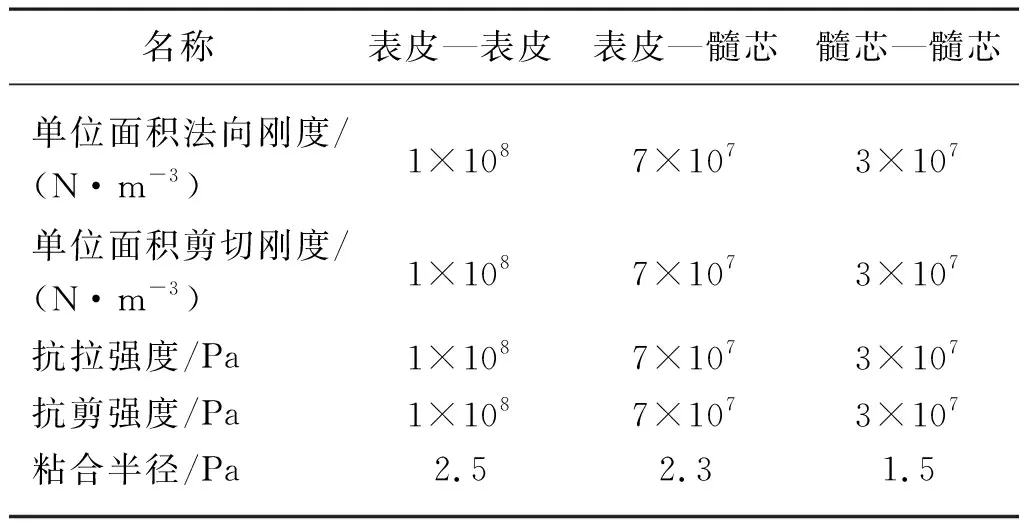
表8 顆粒粘結參數(shù)Tab. 8 Particle bonding parameters
根據(jù)不同行駛速度和撿拾裝置位置分別先建立長0.6 m、1.2 m和1.8 m的方形幾何體,用來盛放秸稈顆粒模型。顆粒工廠選擇total mass設置為靜態(tài)生成方式,并分別用上述mate particle秸稈顆粒模型對其進行填充,填充完畢后代表收獲后平鋪在田間地面的秸稈,如圖9所示,在進行顆粒靜態(tài)填充結束后通過EDEM后處理導出顆粒信息。

(a) 顆粒床側視圖
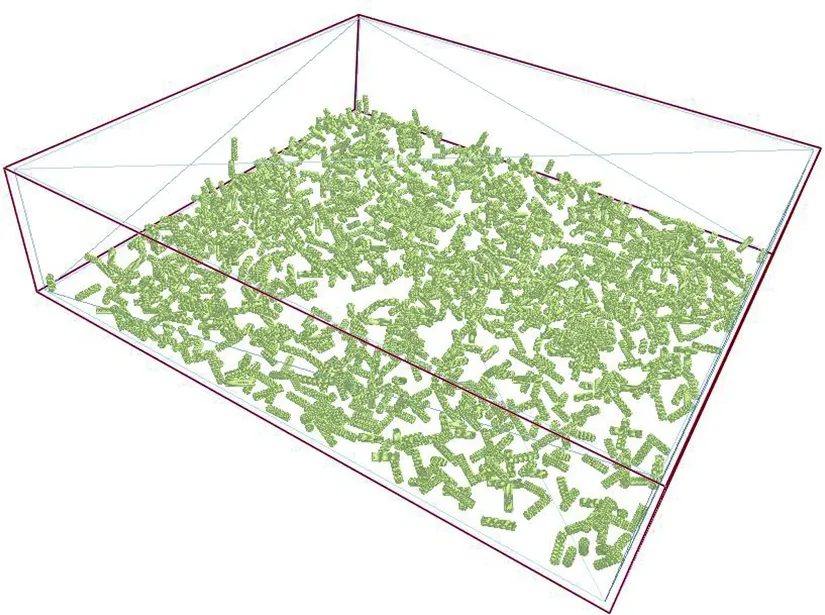
(b) 顆粒床斜二測視圖
3.3 EDEM-RecurDyn耦合仿真分析
將靜態(tài)填充導出的顆粒床作為顆粒工廠,同時將RecurDyn輸出的walls模型導入到EDEM-Geometry,如圖10所示,不需要在EDEM中對模型添加相關運動,但要注意的是EDEM模型材料屬性要與RecurDyn中保持一致。根據(jù)三維模型尺寸及運動情況調(diào)整EDEM求解域為(x,-2 800 mm,600 mm;y,-350 mm,350 mm;z,-900 mm,750 mm),重力方向為Y軸負方向。

(a) 離散元模型側視圖

(b) 離散元模型俯視圖
求解時和RecurDyn中對應仿真時間需一致、步長應為RecurDyn中步長的整數(shù)倍,將RecurDyn和EDEM的仿真時長設置為1.5 s,RecurDyn步長為200,防止仿真過程中發(fā)生顆粒穿透模型,EDEM固定時間步長設置為1.5×10-6s,為保證更準確查看各時刻秸稈被撿拾及破碎狀態(tài),將保存間隔均設置為0.01 s,單元格大小設置為5倍半徑,并打開EDEM耦合接口,在RecurDyn中開始計算。
3.3.1 撿拾器刀輥受力分析
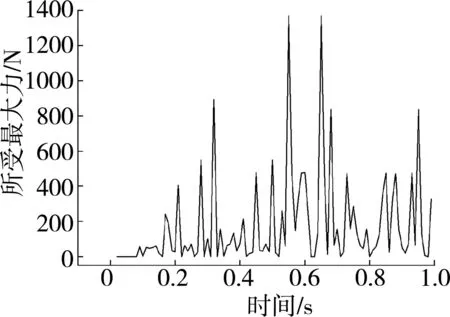
通過EDEM后處理導出各組撿拾過程撿拾器刀輥受力數(shù)據(jù),按照正交試驗序號導入origin進行折現(xiàn)繪圖,如圖11所示,攜帶裝有“Y”型刀雙螺旋排布的撿拾器轉速為2 300 r/min,行駛速度為0.6 m/s時受到最大力為2 366.1 N,已知45鋼的屈服強度355 MPa[16],小于其應力極限,故均滿足使用要求。

(a) Y-1 900 r/min-1.8 m/s
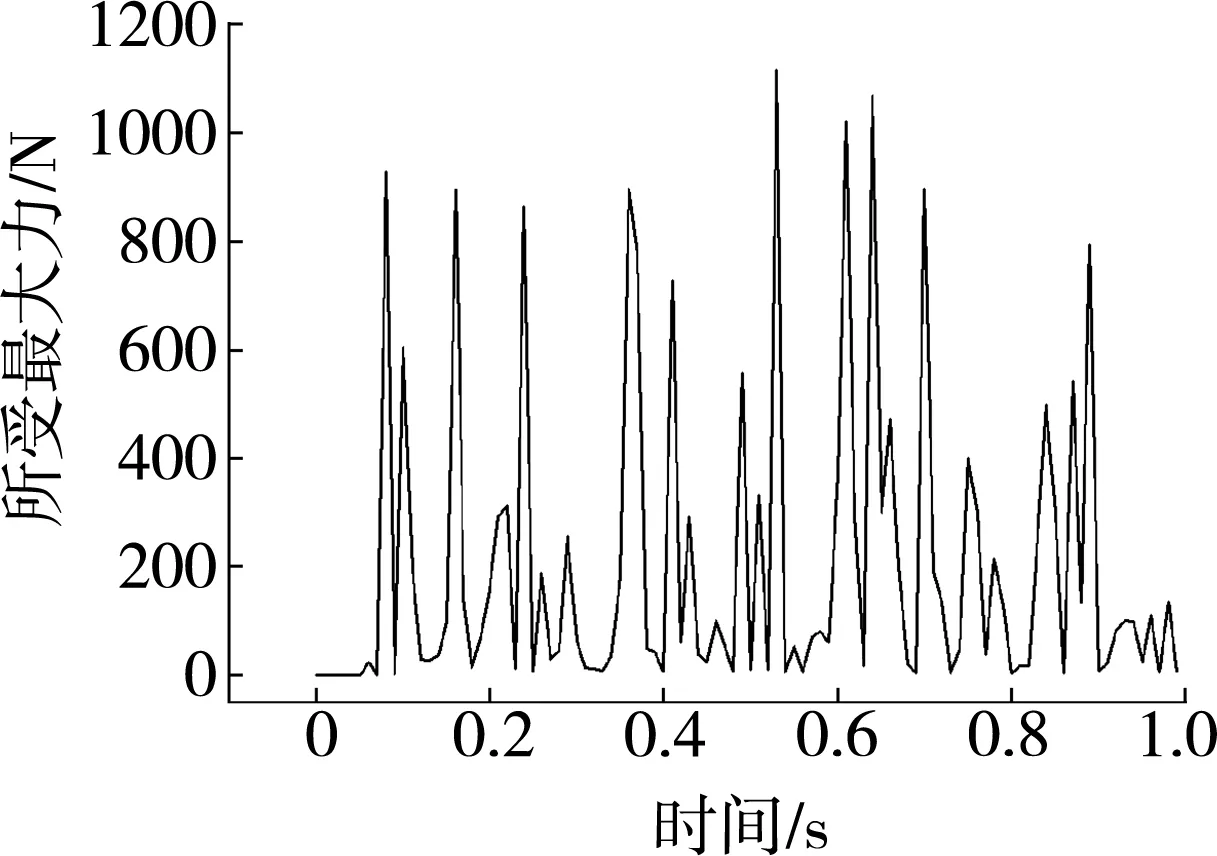
(b) Y-2 100 r/min-1.2 m/s
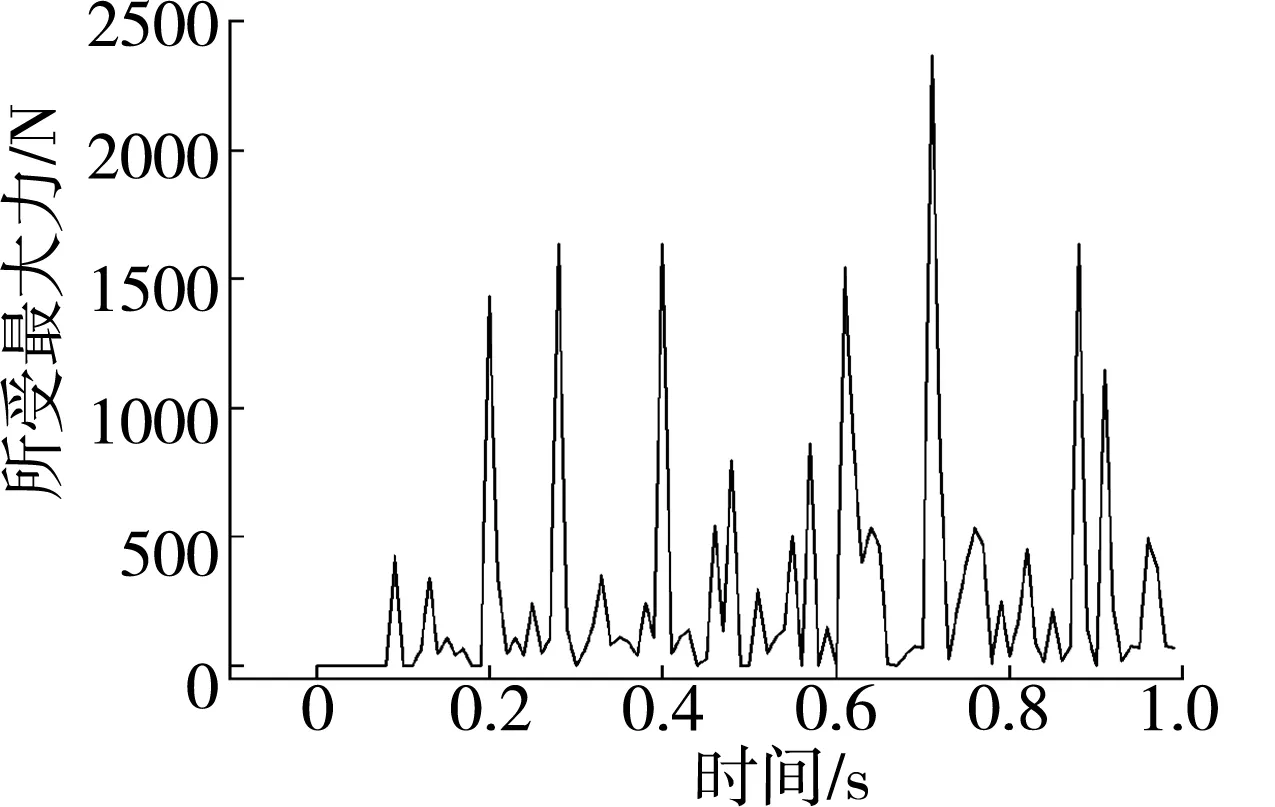
(c) Y-2 300 r/min-0.6 m/s

(d) YC-1 900 r/min-1.8 m/s

(e) YC-2 100 r/min-1.2 m/s
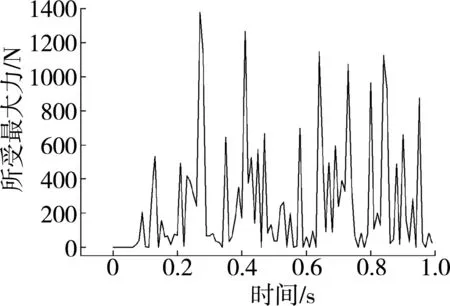
(f) YC-2 300 r/min-0.6 m/s

(g) DC-1 900 r/min-1.8 m/s
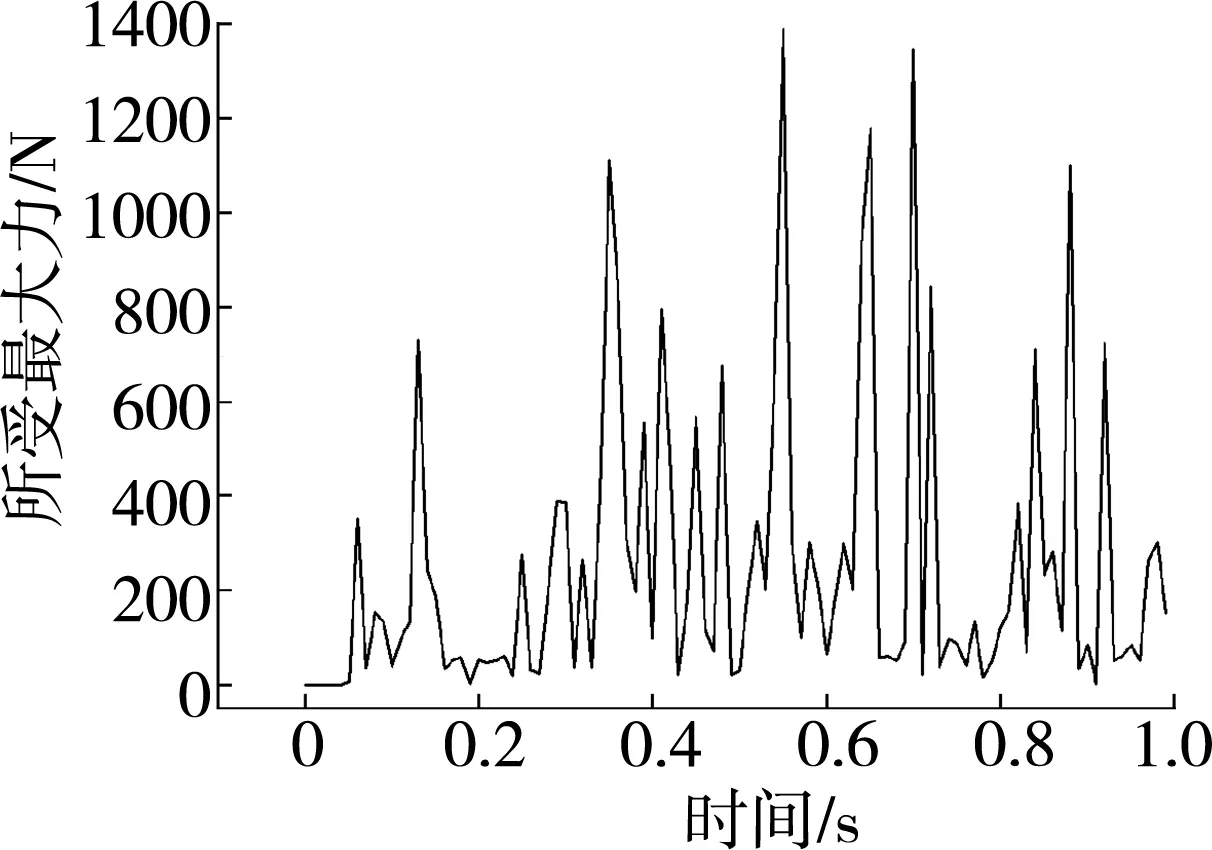
(h) DC-2 100 r/min-1.2 m/s
(i) DC-2 300 r/min-0.6 m/s
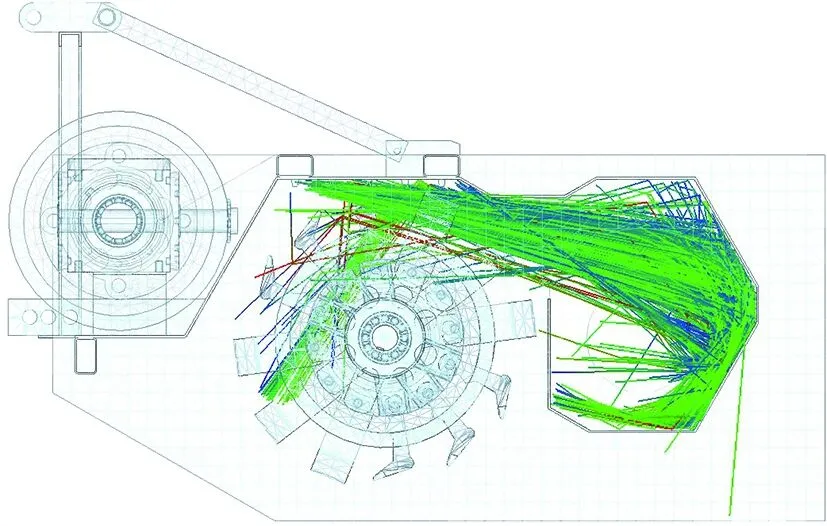
3.3.2 物料在撿拾破碎腔運動軌跡
如圖12所示為秸稈撿拾、破碎情況,在EDEM后處理觀察各時刻秸稈狀態(tài),錘爪對秸稈撿拾效果較好,“Y”型刀對秸稈的破碎效果較好,在撿拾器上方腔室內(nèi)壁定刀位置時,撿拾刀與內(nèi)壁定刀將秸稈撕扯并發(fā)生大量破碎。

(a) 秸稈與錘爪接觸時
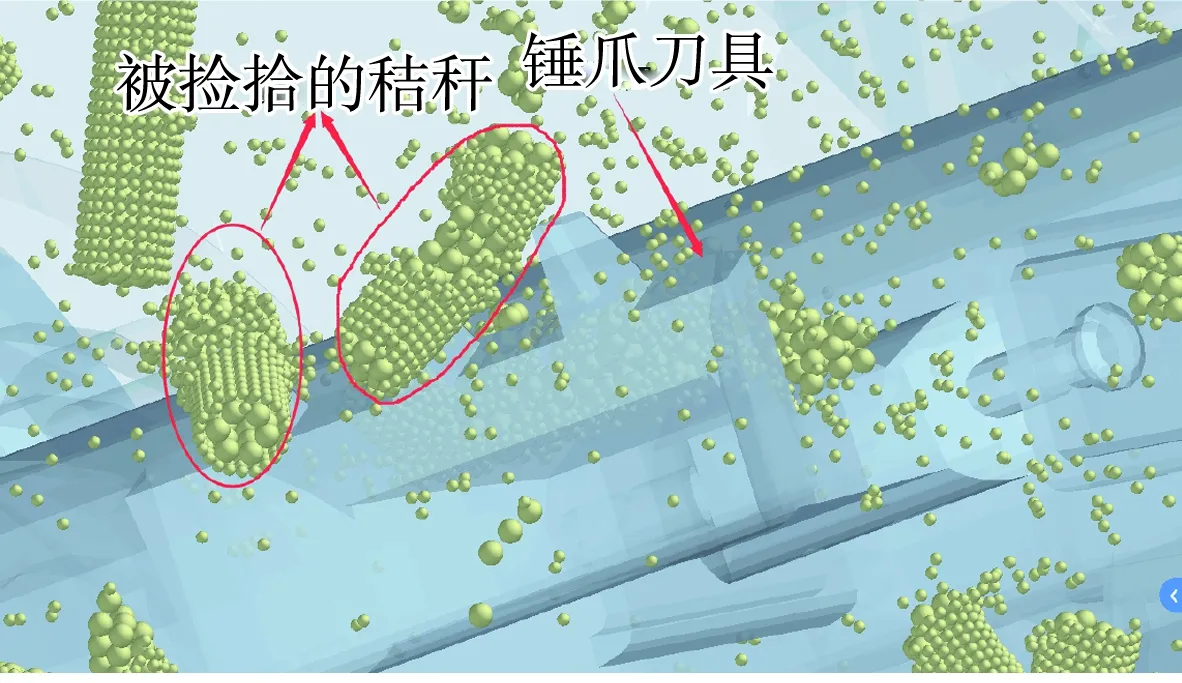
(b) 秸稈與Y型刀接觸時

(c) 在撿拾器上方破碎時
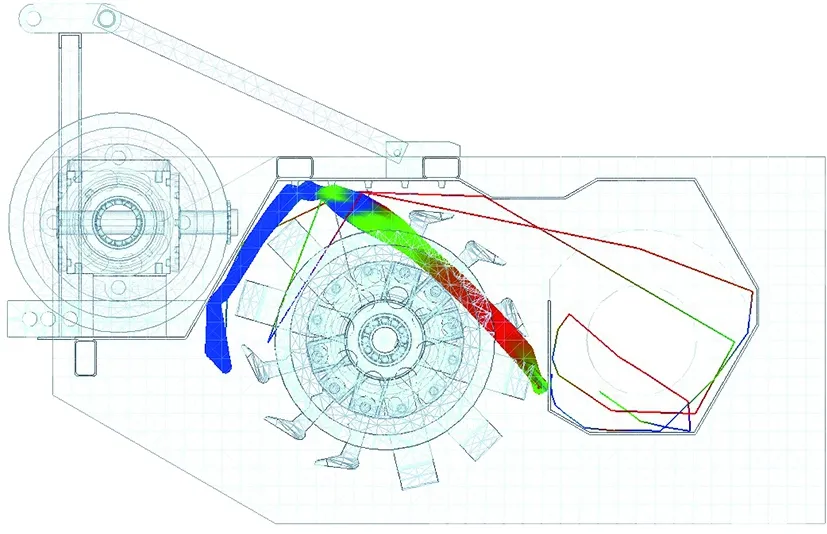
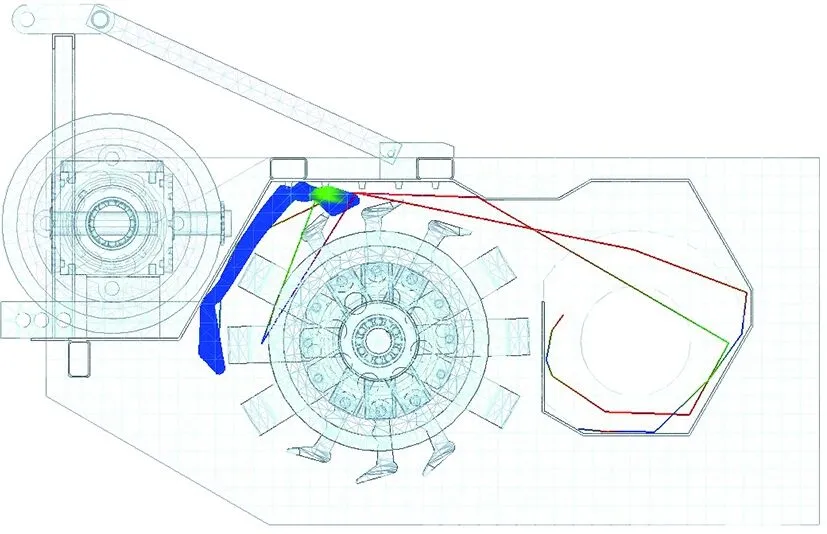
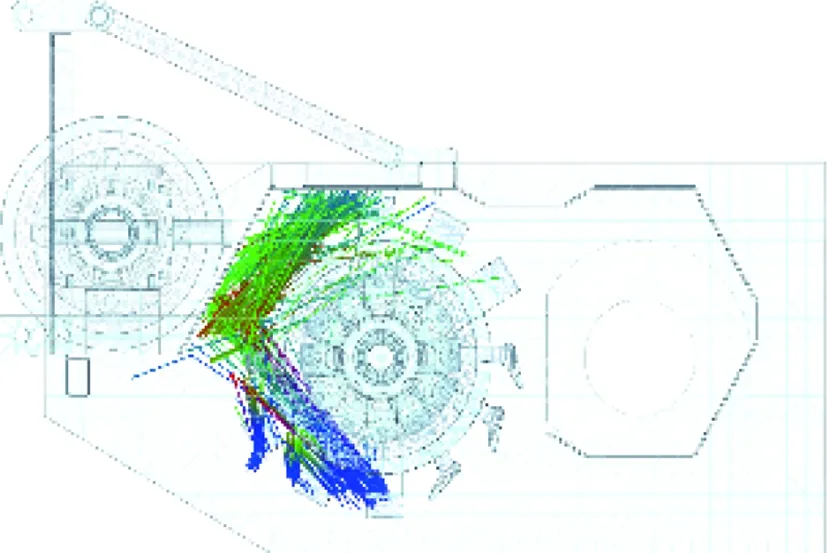
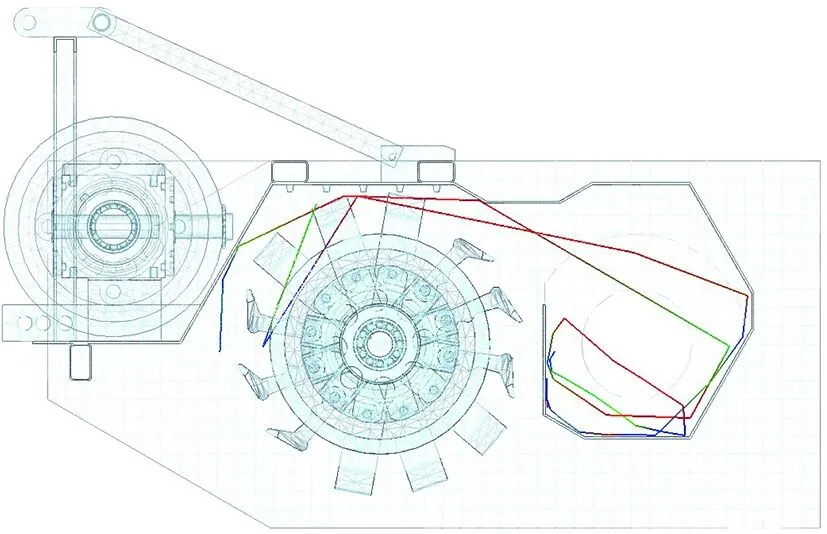
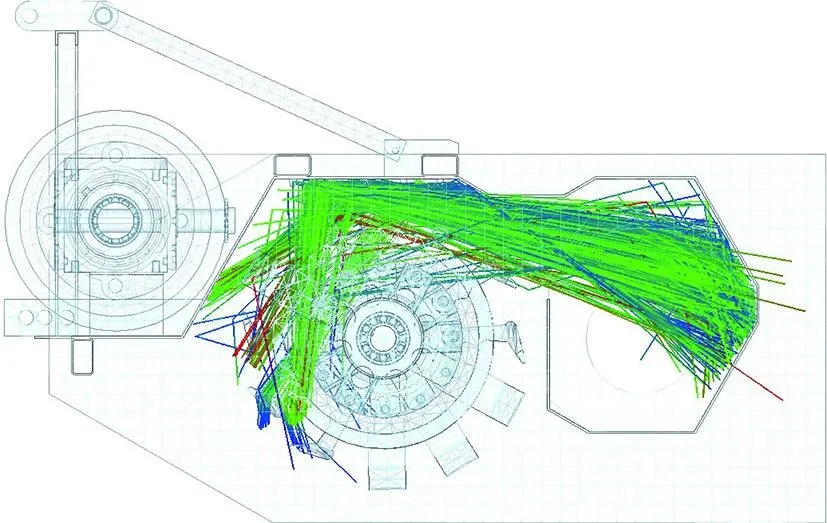
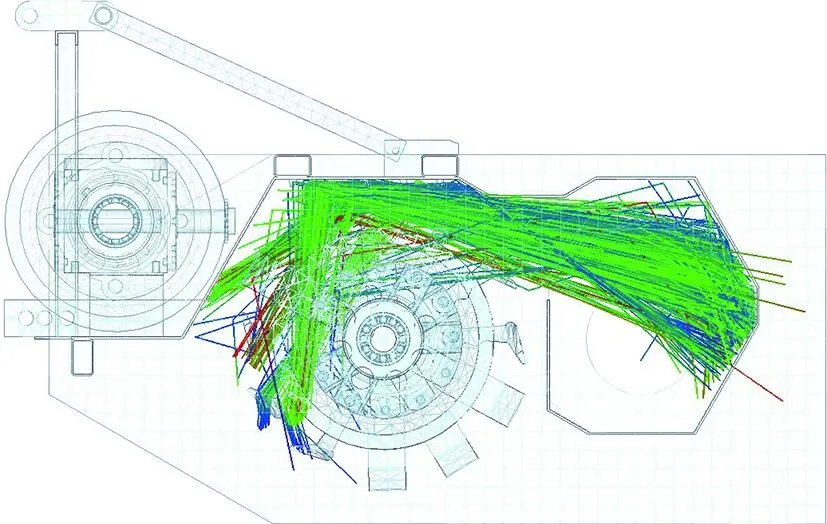
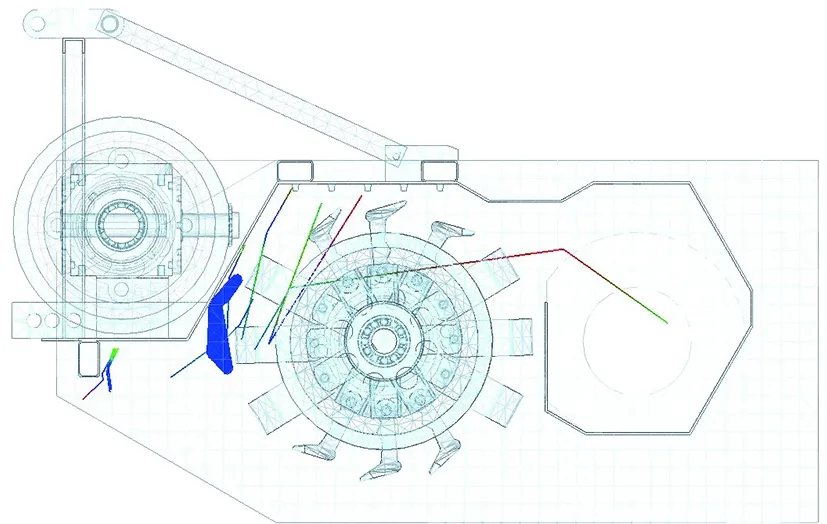
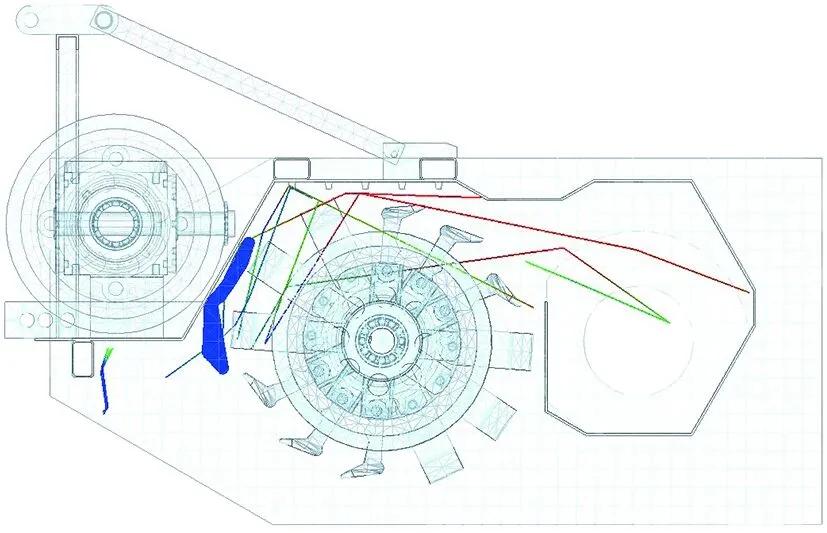
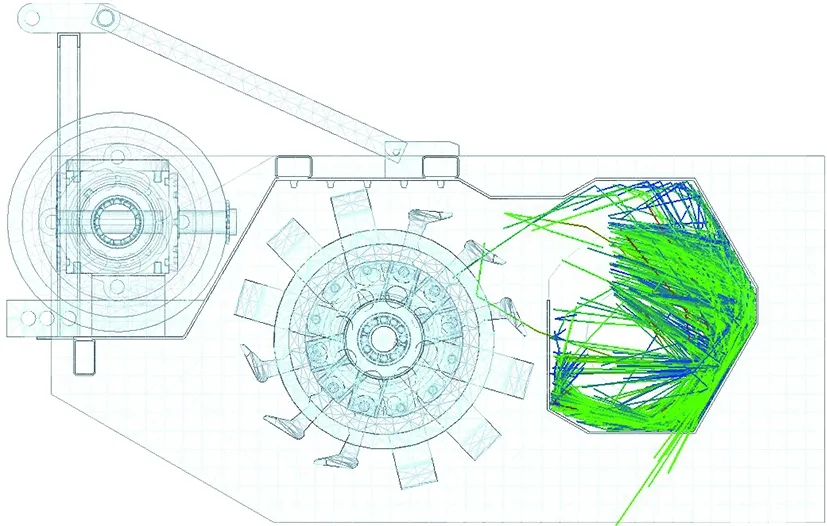
在EDEM后處理添加manual selections選中兩小段秸稈顆粒監(jiān)測其運動軌跡[17],其結果如圖13所示。
從時刻1~時刻8可以看出,該段秸稈破碎不夠徹底且破碎后只有少數(shù)碎屑被拋甩至后方輸送攪龍,大部分被甩至撿拾器與輸送攪龍中間區(qū)域,是因為該段秸稈在撿拾過程中與撿拾刀碰撞次數(shù)過少且沒有經(jīng)過撿拾腔內(nèi)壁定刀部分,沒有發(fā)生大量撕扯,但后續(xù)會由于撿拾器高速旋轉可能會將其吸入撿拾器工作圓環(huán)區(qū)域重新進行撿拾、破碎。
從時刻9~時刻16可以看出,該部分秸稈被撿拾后被順利拋甩至后方攪龍且破碎效果非常好,觀察軌跡是因為該段秸稈被撿拾后與撿拾刀發(fā)生多次接觸且在撿拾腔內(nèi)壁定刀發(fā)生強烈撕扯。
(a) 時刻1

(b) 時刻2

(c) 時刻3
(d) 時刻4
(f) 時刻6
(h) 時刻8
(i) 時刻9
(j) 時刻10
(k) 時刻11

(l) 時刻12
(m) 時刻13
(n) 時刻14

(o) 時刻15
(p) 時刻16
3.3.3 撿拾率
在撿拾器與輸送攪龍中間位置建立一個1×1×1對應方向距離為200 mm×50 mm×150 mm的grid bin group,統(tǒng)計從撿拾秸稈質(zhì)量[18],與顆粒總質(zhì)量比值即為撿拾器的撿拾率,如表9所示。
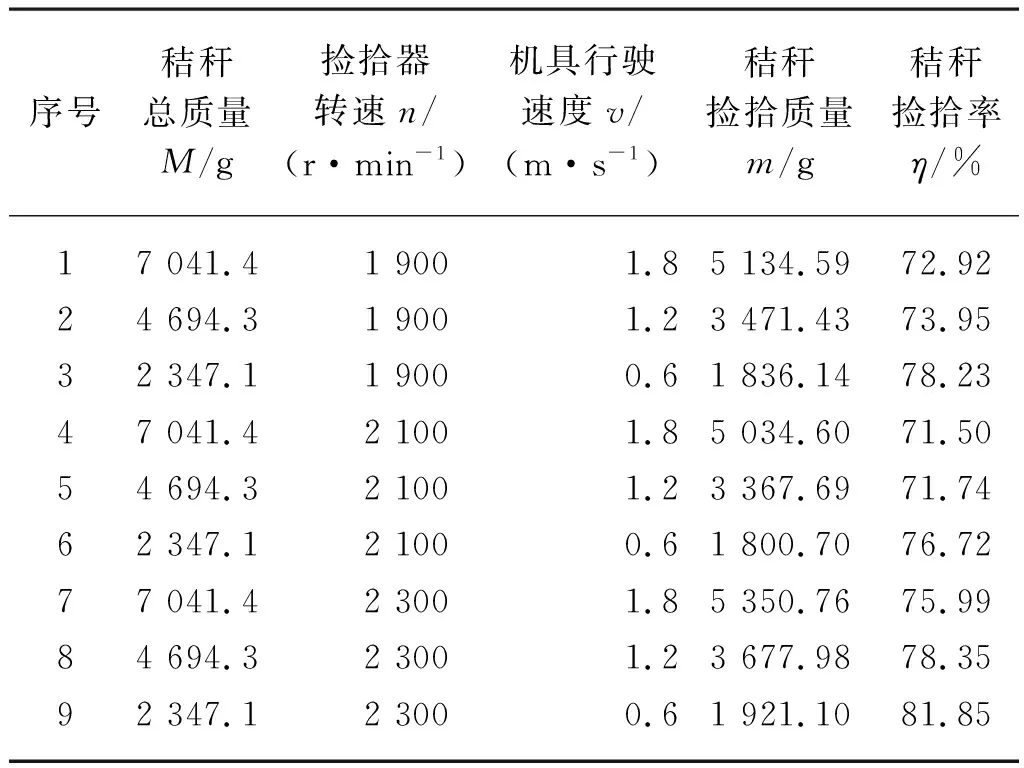
表9 秸稈撿拾率Tab. 9 Straw picking rate
通過仿真數(shù)據(jù)可知,搭載DC撿拾器的秸稈收集機,在行駛速度為1.2 m/s、撿拾器轉速為2 100 r/min時撿拾率最高,達81.85%。
由撿拾率結果可以看出,各種工況下秸稈撿拾率均偏低,這是因為基于EDEM-RecurDyn聯(lián)合仿真只能模擬分析秸稈物料在撿拾器接觸到時才能被撿拾,無法模擬破碎腔內(nèi)氣體流場變化,而實際工作過程中,破碎腔內(nèi)撿拾器高速旋轉時會在該區(qū)域形成負壓,即使接觸不到秸稈物料,也會將附近的秸稈吸入撿拾器并進行破碎、拋甩。
4 結論
1) 本文基于4JQH-120秸稈收集機設計了3種可與之搭配使用的撿拾器,利用ANSYS對其進行模態(tài)分析,采用正交試驗設計,通過EDEM-RecurDyn進行秸稈收集機撿拾裝置部分的離散元-多體動力學聯(lián)合仿真。
2) 通過模態(tài)分析各撿拾器的固有頻率及前6階陣型,確保其都能安全運行;通過觀察刀輥受力情況,遠小于其應力極限,表明各撿拾器均能滿足應力應變要求;通過觀察秸稈物料各時刻運動狀態(tài),可明確秸稈被撿拾、破碎的機理,為破碎腔結構設計提供了理論依據(jù);通過計算對比各種撿拾器在不同工況下?lián)焓奥?搭載DC撿拾器,在轉速為2 300 r/min、行駛速度為0.6 m/s,秸稈撿拾率最高,達81.85%。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39