指向式旋轉導向工具面角度精確控制與優化
2023-05-30 10:48:04吳澤兵蔣夢潔谷亞冰李濟彤翟喜萍
石油機械 2023年4期
吳澤兵 蔣夢潔 谷亞冰 李濟彤 翟喜萍

摘要:指向式旋轉導向工具關鍵性功能是實現快速、平穩地調整鉆井工具面,并在存在外部干擾的情況下維持工具面角度精確控制。為了實現指向式旋轉導向系統對鉆頭工具面的調整,對該系統偏置機構內外偏心環的旋轉角度與鉆頭偏轉角、工具面角的關系進行了理論公式的推導,得出在確定鉆頭偏轉角和工具面角后,內外偏心環運動軌跡的求解公式,利用軟件對運動軌跡公式編程,以求解內外偏心環的運動軌跡以及對運動軌跡進行優選,以快速實現調整目標工具面的運動軌跡,縮短內外偏心環的調整時間,提高系統工作效率;使用三維建模軟件Creo建立指向式旋轉導向工具的幾何模型,并將其導入到ADAMS軟件中進行運動軌跡的仿真,仿真結果與理論值誤差小于2%,驗證了推導的內外偏心環運動軌跡方程的可行性與運動軌跡優選程序的實用性。研究結果可為通過工具面對鉆頭精確控制提供一定的指導。
關鍵詞:鉆井;鉆頭;旋轉導向;偏心環;工具面;運動軌跡
The key functionality of the pointthebit (PTB) rotary steering system is to achieve a rapid and smooth adjustment of the drill bit toolface,and to maintain the toolface in the presence of external interference.Therefore,in order to realize the adjustment of the directional rotary steering system,the paper analyzes the rotation angle of the drill bit and the rotation angle of the internal and external eccentric ring,and optimize the formula to shorten the adjustment time of the internal and external eccentric ring,and improve the efficiency of the system.After the derive motion trajectory equation and designed trajectory optimization program,the threedimensional modeling software Creo was used to establish the geometric model of the PTB rotary steering system,and the geometric model was imported into ADAMS,the virtual prototype simulation software,the relative error between the simulation result and the theoretical one is less than 2%,which verifies the feasibility of the equation and the practicability of the motion trajectory optimization program.The findings of this research provide guidance on precise control of the bit by manipulating the tool face.
drilling;bit;rotary steering;eccentric ring;tool face;movement trajectory
0 引 言
石油和天然氣是與國民經濟相關的戰略資源,據相關統計,我國的石油消費量已經連續多年位居世界第二位。隨著我國經濟的持續高速發展,對石油天然氣的需求仍逐年增加[1-2]。但中國常規石油天然氣資源產量持續下降,石油行業面臨著淺層常規石油時代結束的挑戰,而轉向對低滲透性、深層超深層、深海、頁巖油氣等非常規油氣田的開發[3-5]。因此,傳統的滑動導向鉆井技術已經無法適應時代的需求[6]。為此,研發了一種新型的旋轉導向鉆井技術來應對當前油氣資源開發過程中的各種問題,并在實際應用中展現了鉆井速度快、井身質量好、深井復雜結構井的井眼軌跡控制精度高、鉆桿與井眼的摩擦力小等優勢[7-8]。根據斯皮恩斯的市場調查,截至2019年,旋轉導向鉆井技術已占據石油行業定向鉆井市場的70%以上。20世紀末,我國展開了對旋轉導向技術的研發,到目前為止,已在該技術領域取得了一些顯著的成果;但投入生產應用的旋轉導向系統很少,技術與應用水平與外國石油服務公司相比還存在很大的差距,我國對非常規油氣田的開采還需依賴于國外的旋轉導向技術[3]。因此,仍需努力開發擁有自主知識產權的旋轉導向系統。
目前,在已開發應用的旋轉導向系統中,按系統工作方式可分為推靠式、指向式和混合式(指向式+推靠式)3類[4,9]。指向式旋轉導向系統主要是通過控制偏置機構內外偏心環的旋轉角度來控制鉆頭的鉆進方向。以往關于內外偏心環偏置作業的研究主要集中在內外偏心環的不同旋轉角度與偏心環處心軸中心點位置的關系公式推導,而對實際鉆進過程中鉆頭的偏轉角與工具面角關注較少。
為此,筆者推導了內外偏心環的不同旋轉角度與鉆頭偏轉角、工具面角之間的關系公式,實現由指定的鉆頭偏轉角與工具面角便可計算得到系統偏置機構內外偏心環由初始位置到指定位置的旋轉角度。
筆者主要研究指向式旋轉導向系統中偏置機構對鉆井工具面的快速及精確控制。研究結果可為通過工具面對鉆頭精確控制提供一定的指導。
1 指向式旋轉導向工具結構及原理
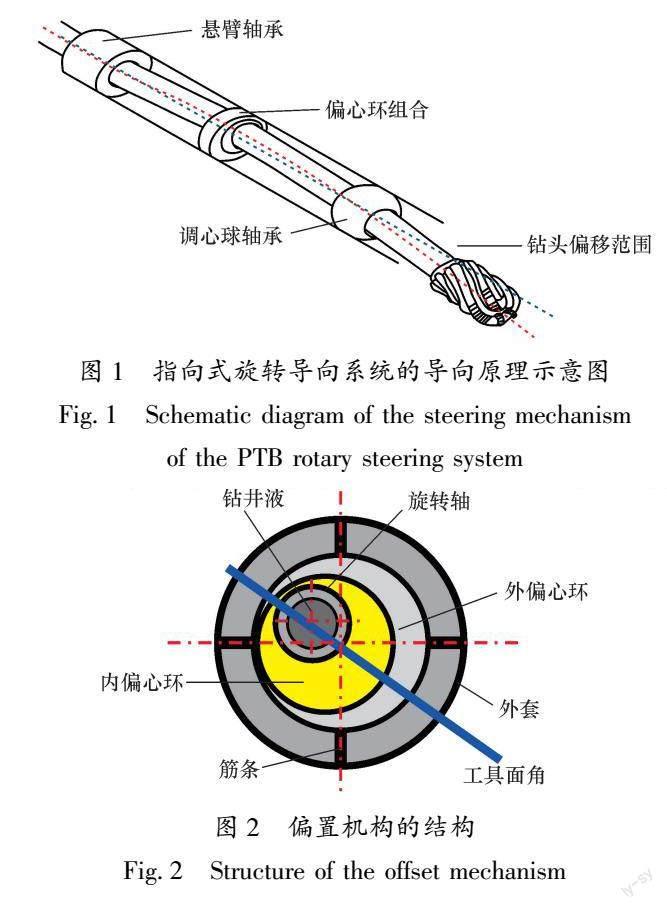
筆者研究的指向式旋轉導向系統主要由外筒、心軸、懸臂軸承、偏心環組合和調心球軸承組成。該旋轉導向工具的外筒相對于井壁不旋轉或旋轉非常緩慢,從而為軸內所需的偏轉提供支撐和參考,并為鉆頭提供鉆壓。系統通過偏置導向機構對與心軸連接鉆頭的工具面進行精確控制。圖1為系統的導向原理示意圖[10]。
偏置導向機構中最主要的執行機構是偏心環組合。筆者研究的偏心環組合由2個偏心率相同的偏心環組成,它通過調整內外偏心環的位置可以實現增斜、穩斜和降斜的目的。偏置機構結構如圖2所示[11-12]。
2 偏心環組合與鉆頭偏轉角及工具面角的關系
在指向式旋轉導向工具的偏置機構中,內外偏心環通過旋轉不同的角度,可以通過組合實現0°到360°的工具面角的設定,通過驅動內外環各自旋轉一定的角度,可以對心軸形成一個可控的工具面角和偏心位移,從而控制鉆頭的工具面角和偏轉角,如圖3所示。在鉆進過程中,可以根據預設的井眼軌跡得到鉆進所需的造斜率和方向,確定對應鉆頭的工具面角和偏轉角,進而求解到內外偏心環對應的旋轉角度。
2.1 心軸彎曲變形的求解
為了使鉆頭達到目標的工具面角和偏轉角,首先分析得出偏心環處心軸中心的偏心位移及工具面角;然后,分析得出內外偏心環分別需要轉動的角度。因此,要優先推導得出鉆頭的工具面角和心軸中心關系的理論方程。
3 內外偏心環運動軌跡優選
偏置機構的動力來源于電機,由傳動部件即齒輪將電機動力傳遞到內外偏心環上。為保證偏心環旋轉角度的控制精度,應控制其角速度Ω在12 (°)/s以內。
實際上,當該工具要按目標造斜率造斜時,需要先調整內外偏心環的工具面角;且造斜過程中,受到地層硬度等不可控因素影響,為保證鉆進按照預設井眼軌跡進行,需要不斷調整偏置機構。要使得調整時間最短,效率提升,則需要對式(10)和式(11)的2組解的4種組合方式進行取舍,獲得內外偏心環的最佳運動軌跡以實現目標鉆頭偏轉角度。
圖6為內外偏心環中心運動軌跡示意圖。A為外偏心環外圈中心位置,B為外偏心環內孔中心,C為偏置機構處心軸中心實際位置。假設C點為心軸中心運動目標點,則外偏心環內孔中心運動到B或者D兩點時,內偏心環再轉動,都可以使心軸中心到達C點。由于e1、e2值的固定,所以可從圖6中看出內外偏心環組合有且僅有2種嚙合方式實現目標偏心位移和角度,顯然,在內外環旋轉角速度Ω一定時,內外環一起旋轉可以最快到達目標位置。
4 系統運動軌跡仿真
利用上述推導的公式,可以由指定的鉆頭偏轉角與工具面角,得到系統偏置機構內外偏心環由初始位置到指定位置的運動軌跡,并用Excel軟件進行編程計算,在求解的4組運動軌跡中優選出時間最短軌跡的計算過程,得出內外偏心環到達指定位置的運動軌跡及優選出使用時間最短的運動軌跡和運動時間。
系統仿真模型心軸外徑D=50 mm,內徑d=30 mm,偏置環組合距懸臂軸承的距離為a=675 mm,懸臂軸承與球軸承間的心軸軸向距離為l=1 m,偏置機構內外偏心環的偏心距e均為5.87 mm。利用程序計算出鉆頭從初始狀態調整到偏轉角為2.48°、工具面角為68°時的內外偏心環運動軌跡及最優軌跡。程序計算結果如表1所示。
4.1 幾何仿真模型建立
為驗證上述推導所得公式與根據公式編寫計算程序的正確性與實用性,筆者將通過虛擬樣機的構建,利用ADAMS虛擬仿真方法,求解造斜狀態下內外偏心環運動軌跡變化曲線,并將鉆頭偏轉角和工具面角仿真值與給定期望值進行比較,得出差異,以判定理論公式與計算程序的可行性。
具體的試驗過程如下:首先,使用ADAMS虛擬樣機軟件構建指向式旋轉導向機構的仿真模型。ADAMS軟件建模模塊在建立復雜模型方面稍顯遜色,可先利用Creo建立指向式旋轉導向機構的幾何模型。模型主要由心軸、內外偏心環組合、調心軸承、懸臂軸承、外套等零部件組成,具體幾何模型如圖7所示。
然后,將上述的指向式旋轉導向機構的簡化仿真模型采用Parasolid標準傳遞文件導入到ADAMS軟件中;根據此系統的工作原理,添加約束與驅動,并依據各個部件的選材,設置模型的材料屬性;同時,定義運動驅動、部件之間接觸等,進而完成虛擬樣機的設置,進行運動仿真。在ADAMS軟件中的各零部件之間添加的運動副如表2所示,接觸對如表3所示。
外環
在ADAMS軟件中,按照表2和表3施加約束副、設置接觸對及其他邊界條件,得到心軸的仿真模型,如圖8所示[15]。
4.2 仿真實例
利用ADAMS軟件模擬鉆頭從初始狀態調整到偏轉角為2.48°、工具面角為68°時,其偏置機構從初始位置到指定位置的運動軌跡及運動時間。由于當內外環角度到達指定位置時,便會停止轉動,常規的驅動施加方式已經無法完成這一特殊計算。因此,筆者為了實現上述內外環的運動軌跡仿真,采用了腳本仿真控制驅動,具體實現模擬的步驟如下:
第一步,創建2個角度測量,分別是內環與外環之間角度測量INNERRING_ANGLE和外偏心環與Y軸負向角度測量OUTERRING_ANGLE,并對內外偏心環的旋轉角度進行監控。
第二步,在對這2個角度測量分別施加2個傳感器SENSOR_1與SENSOR_2時,當內外偏心環旋轉到指定位置后,便停止轉動。
第三步,分別為心軸施加MOTION_3、外偏心環施加MOTION_2和內偏心環施加MOTION_1 3個旋轉驅動,然后設置心軸轉速為200 r/min。選用腳本仿真控制中的ADAMS Solver Commands求解器命令方式,用輸入的命令和參數對內外偏心環的旋轉驅動進行控制,具體命令如圖9所示。最后選用執行腳本命令來進行仿真,即在Simulation中選用Script Control進行仿真。
仿真中得到提示:傳感器SENSOR_1被觸發后,停止仿真模擬,具體提示如圖10所示。仿真結束時提示仿真時間為16.83 s,即內外偏心環在16.83 s后到達指定位置。
4.3 仿真結果
內外偏心環的角度測量曲線與內偏心環內圈中心點的位移曲線變化,即心軸在偏置機構處截面中心點的位移曲線變化,分別如圖11和圖12所示。
由圖11可知,外偏心環轉動22°后觸發傳感器SENSOR_2,外偏心環便停止轉動,內偏心環繼續旋轉到202°時傳感器SENSOR_1被觸發,此時內偏心環停止轉動,模擬仿真結束。
由圖12可以看出,在前1.9 s的時間里,由于內、外偏心環保持同速旋轉,內外偏心環的相對位置并沒有發生改變,因此心軸的位置也沒有發生變化。1.9 s后傳感器SENSOR_2外偏心環停止轉動,內偏心環繼續旋轉,心軸的位移曲線便開始變化,直到達到指定位置。模擬仿真結束后心軸的位置坐標為x=-4.056 4 mm、y=-10.231 8 mm,心軸總位移為在工具面角為248.374 1°方向偏移了11.01 mm。鉆頭的中心點運動軌跡如圖13所示。根據式(5)和式(6)計算的理論值:偏心環處心軸中心點的位置坐標為x=-3.942 0 mm、y=-9.757 8 mm,與仿真結果相比誤差小于5%,驗證了此理論公式的正確性。
從圖13可以看出,鉆頭中心最后的位移坐標為x=2.361 2,y=6.265 8,總位移為在工具面角69.351°方向偏移了6.696 mm。調心球軸承到鉆頭工作面的距離為159.980 mm,鉆頭的偏轉角為2.49°。與預設鉆頭的偏轉角為2.48°、工具面角為68°的誤差小于2%,驗證了本文推導內外偏心環的不同旋轉角度與鉆頭偏轉角、工具面角之間的關系公式的正確性與實際應用的可行性,并且驗證了內外偏心環運動軌跡優選程序的正確性。
圖13 鉆頭中心位移變化曲線
Fig.13 Change of the bit center displacement curve
5 結 論
(1)根據推導得到的系統偏置機構內外偏心環運動軌跡公式,可以得到每一組確定的鉆頭偏轉角和工具面角,也可得到4組不同的內外環旋轉角度。為了縮短偏置機構的調整時間,本文通過Excel軟件編輯程序求解的4組運動軌跡中時間最短的軌跡。
(2)利用Creo軟件建立了簡化的指向式旋轉導向系統的三維模型,基于該幾何模型在ADAMS軟件建立了有限元動態仿真模型,利用此模型進行了實例仿真,得到內外偏心環、心軸與鉆頭的運動軌跡,對比理論與仿真結果的誤差小于2%。驗證了推導所得的內外偏心環的不同旋轉角度與鉆頭偏轉角、工具面角之間關系公式的正確性與實際應用的可行性,并且驗證了內外偏心環運動軌跡優選程序的正確性。
(3)編制的偏心環運動軌跡優選程序,可以快速實現指向式旋轉導向系統對鉆頭工具面的調整,有利于提高導向系統的工作效率。
[1] 向琳.旋轉導向鉆井工具鉆頭鉆進力學研究[D].西安:西安石油大學,2021.
XIANG L.Study on drilling mechanics of rotary steering drilling tool bit[D].Xian: Xian Shiyou University,2021.
[2] 閆園園,解慶,胡林,等.旋轉導向鉆井系統發展概述[J].石化技術,2019,26(10):228,233.
YAN Y Y,XIE Q,HU L,et al.Overview of rotary guided drilling system development[J].Petrochemical Industry Technology,2019,26(10): 228,233.
[3] LI F,MA X Y,TAN Y Q.Review of the development of rotary steerable systems[J].Journal of Physics: Conference Series,2020,1617: 012085.
[4] EPIKHIN A,ZHIRONKIN V,CEHLR M.Prospects for the use of technology of rotary steerable systems for the directional drilling[J].E3S Web of Conferences,2020,174: 01022.
[5] 劉丁丁.旋轉地質導向鉆井工藝技術應用研究[J].中國石油和化工標準與質量,2020,40(11):191-192.
LIU D D.Research on the application of rotational geological guided drilling technology[J].China Petroleum and Chemical Standard and Quality,2020,40(11): 191-192.
[6] 付勇華.旋轉導向鉆井技術應用于水平定向鉆進中[J].中國石油和化工標準與質量,2020,40(19):149-151.
FU Y H.Rotary directional drilling technology is applied in horizontal directional drilling[J].China Petroleum and Chemical Standard and Quality,2020,40(19): 149-151.
[7] 趙峰.水平井旋轉造斜鉆井工具研究[J].西部探礦工程,2021,33(10):45-46,49.
ZHAO F.Research on horizontal well rotary inclined drilling tools[J].WestChina Exploration Engineering,2021,33(10): 45-46,49.
[8] 宋紅喜,曾義金,張衛,等.旋轉導向系統現狀及關鍵技術分析[J].科學技術與工程,2021,21(6):2123-2131.
SONG H X,ZENG Y J,ZHANG W,et al.Current situation and key technology analysis of rotary steering system[J].Science Technology and Engineering,2021,21(6): 2123-2131.
[9] SONG X Y,VADALI M,XUE Y Z,et al.Tracking control of rotary steerable toolface in directional drilling[C]∥2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM).Banff,AB,Canada: IEEE,2016: 1210-1215.
[10] 李穎.指向式旋轉導向鉆井工具動力學分析與工作性能研究[D].北京:中國地質大學(北京),2010.
LI Y.Dynamics analysis and performance study on pointtothebit rotary steering drilling tools[D].Beijing: China University of Geosciences (Beijing),2010.
[11] 沈攀.指向式旋轉導向鉆井系統偏置導向機構的研究[D].北京:中國地質大學(北京),2009.
SHEN P.Study on the deflection mechanism of the pointthebit rotary steerable system[D].Beijing: China University of Geosciences (Beijing),2009.
[12] 馮定,鄢標,夏成宇,等.井眼軌跡控制工具主軸力學行為分析[J].科學技術與工程,2016,16(4):173-177.
FENG D,YAN B,XIA C Y,et al.The mechanical behavior analyse of spindle in wellbore track control tool[J].Science Technology and Engineering,2016,16(4): 173-177.
[13] 亓京波.指向式旋轉導向鉆井工具組合動密封設計[D].北京:中國地質大學(北京),2011.
QI J B.Combination dynamic seal design of rotary steering drilling tool[D].Beijing: China University of Geosciences (Beijing),2011.
[14] 吳澤兵,蔣夢潔,谷亞冰,等.指向式旋轉導向偏置機構方向控制及動力學仿真[J].鉆采工藝,2021,44(6):13-18.
WU Z B,JIANG M J,GU Y B,et al.Direction control and dynamics simulation of bias unit of pointthebit RSS[J].Drilling & Production Technology,2021,44(6): 13-18.
[15] 何勝林,李明,王光,等. GeoSphere地質導向工具在深水氣田水平井鉆井中的應用[J]. 天然氣工業, 2021, 41(4): 91-96.
HE S L, LI M, WANG G, et al. Application of GeoSphere geosteering tool to the drilling of horizontal wells in deepwater gas fields[J]. Natural Gas Industry, 2021, 41(4): 91-96.
[16] 黃文君,王舸,高德利. 推靠式旋轉導向工具造斜率預測方法[J]. 天然氣工業, 2021, 41(7): 101-106.
HUANG W J, WANG G, GAO D L. A method for predicting the build-up rate of “pushthebit” rotary steering tool[J]. Natural Gas Industry, 2021, 41(7): 101-106.