陶瓷壓磚機(jī)的動(dòng)梁絕對(duì)速度控制
2023-05-30 10:24:30蘇龍保梁超寰楊金輝
佛山陶瓷 2023年3期
蘇龍保 梁超寰 楊金輝
摘 要:本文介紹了陶瓷壓磚機(jī)的動(dòng)梁控制特點(diǎn),及分析了現(xiàn)有的控制思路的原理和優(yōu)缺點(diǎn),并提出了一種新的控制方案。通過控制動(dòng)梁的絕對(duì)速度,重復(fù)性更好,結(jié)合位置閉環(huán)控制達(dá)到定位精度要求,操作便捷,性能更優(yōu)。
關(guān)鍵詞:大慣性;絕對(duì)速度控制;比例閥控制;陶瓷壓磚機(jī)
1 前言
陶瓷壓磚機(jī)的動(dòng)梁控制,是磚坯的成型品質(zhì)關(guān)鍵之一,嚴(yán)重時(shí)會(huì)導(dǎo)致磚坯分層及開裂等缺陷。動(dòng)梁下行的沖擊粉料的過程,如果沖擊速度不合適會(huì)造成粉料壓縮不夠或者粉料顆粒間的氣體無法及時(shí)排出造成分層等。尤其是當(dāng)前陶瓷磚市場(chǎng)是以大磚為主,對(duì)應(yīng)的壓機(jī)壓制力需求更高,工作臺(tái)面尺寸更大,使得陶瓷壓機(jī)的質(zhì)量越來越大,單個(gè)動(dòng)梁部件的重量達(dá)到十幾噸重,如此大慣量的運(yùn)動(dòng)更加難以控制。目前動(dòng)梁的控制均是簡(jiǎn)單的開環(huán)控制:根據(jù)動(dòng)梁當(dāng)前位置決定輸出指定的電壓指令去控制比例閥,控制簡(jiǎn)單,如果相關(guān)參數(shù)有調(diào)整或者外圍因素(比如氣壓)影響到動(dòng)梁動(dòng)作,就必須重新調(diào)整多個(gè)動(dòng)梁參數(shù)來配合現(xiàn)場(chǎng)工藝,對(duì)壓機(jī)操作人員的要求比較高,當(dāng)前陶瓷生產(chǎn)線的人員越來越少,人員技能沒辦法提升到更高一層次來滿足工藝要求,就會(huì)造成陶瓷磚的生產(chǎn)頻頻出現(xiàn)質(zhì)量問題。因此,壓磚機(jī)的動(dòng)梁控制方式需要作改進(jìn),以便適應(yīng)各種工況,提高控制性能并且降低對(duì)操作人員的要求。
2當(dāng)前陶瓷壓磚機(jī)動(dòng)梁控制方法
目前,陶瓷壓磚機(jī)的動(dòng)梁控制油路主要有兩種方式:普通插裝閥控制以及比例閥控制。一般成型壓力在3000噸以下的小型壓磚機(jī),均是生產(chǎn)瓷片或者西瓦,對(duì)磚坯質(zhì)量要求不高,只要求產(chǎn)量,這種機(jī)型均是采用普通插裝閥控制動(dòng)梁,動(dòng)梁質(zhì)量也小。而成型壓力在3000噸以上的壓機(jī),主要生產(chǎn)地磚為主,磚坯尺寸也大,對(duì)磚坯質(zhì)量要求較高,普遍采用比例閥控制。本文主要介紹的是針對(duì)采用比例閥控制動(dòng)梁的中大型壓磚機(jī)。
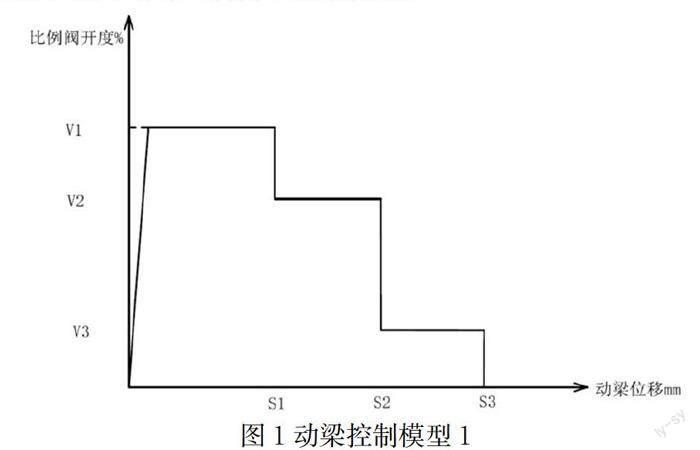
中大型陶瓷壓磚機(jī)的動(dòng)梁控制過程(以動(dòng)梁到達(dá)目標(biāo)位置S3為例),見圖1:動(dòng)梁比例閥開口度快速給定設(shè)定的快速速度V1;當(dāng)?shù)竭_(dá)快慢切換位置S1時(shí),動(dòng)梁比例閥開口度切換成V2繼續(xù)運(yùn)行;當(dāng)動(dòng)梁位置到達(dá)剎車位置S2時(shí),動(dòng)梁比例閥開口度給定為慢速速度V3;到達(dá)目標(biāo)位置S3,則將比例閥開口度給定為0,至此整個(gè)動(dòng)梁控制完成,但是實(shí)際控制過程均要求對(duì)參數(shù)設(shè)置把控非常精準(zhǔn),否則會(huì)造成大的超調(diào)或者抖動(dòng)。動(dòng)梁質(zhì)量大,運(yùn)動(dòng)慣量大,減速控制不好就會(huì)造成剎不住車的現(xiàn)象。同時(shí)運(yùn)行過程中遇到外部干擾,比如上油箱氣壓波動(dòng)也會(huì)造成實(shí)際控制不柔和或者震動(dòng)的情況。
3動(dòng)梁絕對(duì)速度控制方法
動(dòng)梁絕對(duì)速度控制方法所直接控制的對(duì)象不再是比例閥的開口度,控制的是動(dòng)梁機(jī)構(gòu)的絕對(duì)速度。在啟動(dòng)之前就根據(jù)目標(biāo)位置以及相關(guān)特性參數(shù)規(guī)劃計(jì)算出一條速度控制曲線,控制比例閥的開口度來調(diào)整實(shí)時(shí)速度以達(dá)到跟隨規(guī)劃速度曲線,從而達(dá)到被控對(duì)象的穩(wěn)定性。
其中有以下幾個(gè)參數(shù):
加速度:動(dòng)梁運(yùn)行的加速度
減速度:跟動(dòng)梁機(jī)構(gòu)匹配的受控的減速度
給定速度:動(dòng)梁期望運(yùn)行的速度
給定目標(biāo)位置:最終定位的目標(biāo)位置
PID調(diào)整增益:運(yùn)行過程中速度閉環(huán)控制的PID調(diào)整速度。
其中加速度、減速度會(huì)根據(jù)機(jī)型,結(jié)合理論計(jì)算以及實(shí)際測(cè)試給出推薦值,以達(dá)到當(dāng)前機(jī)型的最優(yōu)值。
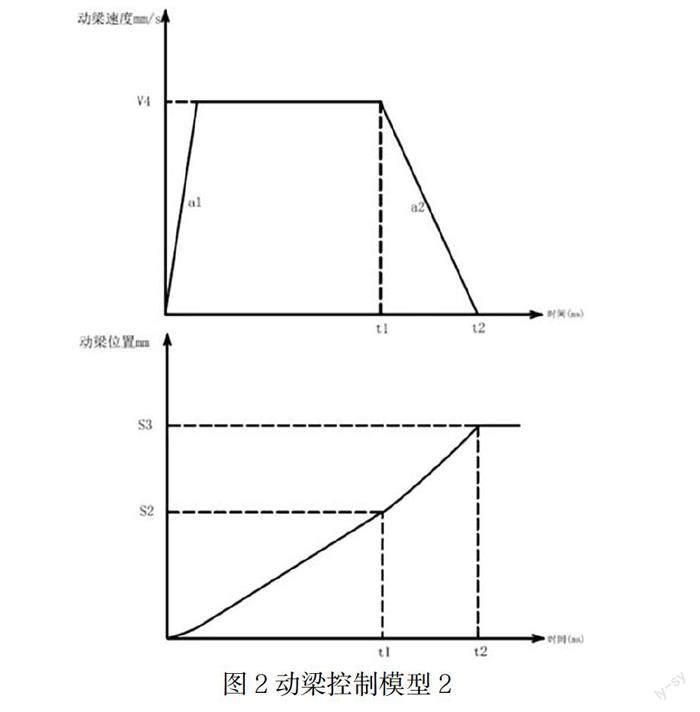
控制過程見如圖2所示。
根據(jù)給定參數(shù),系統(tǒng)內(nèi)部會(huì)規(guī)劃出一條基于時(shí)間軸的速度控制曲線,
運(yùn)行過程,根據(jù)動(dòng)梁的位置反饋進(jìn)行微分計(jì)算出動(dòng)梁的絕對(duì)速度,再與規(guī)劃速度進(jìn)行對(duì)比PID控制,達(dá)到跟隨規(guī)劃速度曲線,
在減速階段,同時(shí)調(diào)用目標(biāo)位置的位置閉環(huán),起到速度、位置雙閉環(huán)控制,最終達(dá)到運(yùn)行過程的穩(wěn)定、最終到位的精準(zhǔn)性。
絕對(duì)速度控制的優(yōu)點(diǎn)在于:用戶設(shè)定參數(shù)少,除了絕對(duì)速度以外,其他設(shè)定參數(shù)對(duì)生產(chǎn)工藝影響非常小,降低了對(duì)用戶的技術(shù)要求;抗外部干擾的能力強(qiáng),系統(tǒng)內(nèi)部會(huì)進(jìn)行實(shí)時(shí)控制修正,達(dá)到運(yùn)行過程的穩(wěn)定順暢,最終定位準(zhǔn)確的效果。
4動(dòng)梁絕對(duì)速度控制試驗(yàn)測(cè)試
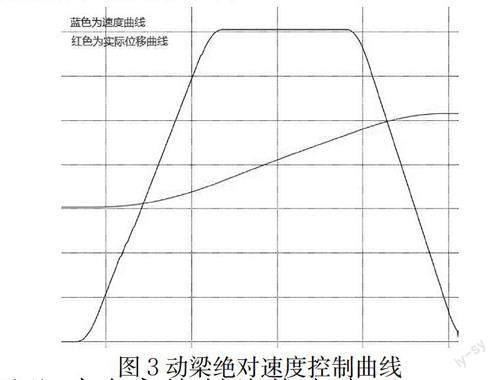
針對(duì)動(dòng)梁絕對(duì)速度控制,進(jìn)行了大量的試驗(yàn)。通過對(duì)模型參數(shù)、比例閥特性進(jìn)行大量數(shù)據(jù)驗(yàn)證,確定了最終的適合參數(shù),控制效果如圖3所示。此種控制模式,能夠有效解決當(dāng)前中大型壓機(jī)的快而不穩(wěn),穩(wěn)而不快,產(chǎn)量與質(zhì)量不能同時(shí)兼得的難點(diǎn),達(dá)到動(dòng)梁控制快且穩(wěn),產(chǎn)量與質(zhì)量同時(shí)兼顧的效果。
5動(dòng)梁絕對(duì)速度控制的推廣應(yīng)用
通過實(shí)際生產(chǎn)驗(yàn)證了動(dòng)梁絕對(duì)速度控制是可行的,并且得到了顯著的效果。結(jié)合高速運(yùn)算能力的控制器,其控制效果更加優(yōu)異,目前此種控制方法已經(jīng)應(yīng)用到恒力泰的部分機(jī)型。后續(xù)會(huì)進(jìn)一步推廣使用,降低客戶的使用要求,同時(shí)提升性能,提高客戶的產(chǎn)品生產(chǎn)效率和產(chǎn)品質(zhì)量。
參考文獻(xiàn)
[1] 許光彬.高速平滑S曲線加減速速度控制算法研究[J].控制工程,2017(10)
[2] 張柏清,等.全自動(dòng)液壓壓磚機(jī)(第1版)[M].江西:江西科學(xué)技術(shù)出版社.2001
