基于狀態反饋和預瞄前饋的智能車半主動懸架控制*
2023-05-29 09:59:46李子先潘世舉何濱兵徐友春
汽車工程 2023年5期
李子先,潘世舉,朱 愿,何濱兵,徐友春
(陸軍軍事交通學院,天津 300161)
前言
智能車輛是一個集環境感知、定位導航、運動規劃、軌跡跟蹤等功能于一體的綜合系統[1],包含了未來駕駛情況的關鍵信息。目前,考慮路面信息的智能車運動規劃研究較少,導致在復雜多變的路面環境中軌跡規劃的路面起伏較大,給智能車行駛過程中的平順性帶來了挑戰。阻尼力可控的半主動懸架能夠抵消路面沖擊,實時調整車身姿態,且功耗和成本較低[2-3],滿足智能車對懸架系統的性能要求。同時,智能車輛的發展也為考慮路面預瞄信息的懸架控制帶來了契機[4]。
考慮路面信息的懸架控制包括基于路面等級的控制方法[5-6]、基于軸距預瞄的控制方法[7-9]和基于車前預瞄的控制方法[10-13]。文獻[5]中采用簧載加速度信號識別路面不平度等級,根據布谷優化算法計算不同路面等級下的懸架輸出力。文獻[6]中設計了一種適用于重型救援車輛的懸架控制方法,基于T-S 模糊控制規則識別路面等級,并根據識別的路面等級、輪胎剛度、非簧載質量、簧載質量、懸架阻尼、懸架剛度自適應調整最優H∞控制器參數矩陣。文獻[7]中考慮時變輸入時滯、懸架系統參數不確定性和軸距預瞄信息,提出了一種魯棒H∞和廣義H2的狀態反饋控制方法。文獻[8]中針對帶附加氣室空氣懸架提出了一種魯棒H∞控制方法和節流阻尼孔面積控制方法,解決了懸架期望力到可調參數的轉換問題。文獻[9]中基于小波噪聲理論設計了一種集成模糊邏輯控制和PID 控制的軸距預瞄主動懸架控制方法,當后懸架簧載質量垂向加速度低于閾值時,僅采用PID 控制,超過閾值時,模糊邏輯控制介入。文獻[10]中提出了一種改進型天棚預瞄控制策略,采用LQR 算法求解最優天棚阻尼系數和變阻尼虛系數,進而根據預瞄的路面信息求解各懸架的最優阻尼力。文獻[11]中設計了一種基于路面類型識別的懸架控制方法,采用卷積神經網絡識別路面類型,并通過遺傳算法計算砂石路、瀝青路、水泥路、彈石路4 種路面下懸架的最優控制參數。文獻[12]中提出了一種基于徑向基神經網絡模型預測控制的懸架控制策略,其中,RBF模型的輸入為車輛狀態和車輛前方路面不平度信息,輸出為懸架控制量,并將其輸出作為MPC 優化求解器的初值。文獻[13]中提出了一種變步長模型預測控制方法,根據車速和雙目相機采集的路面信息確定模型預測控制的步長,使得納入控制器中的路面信息能夠更準確地反映路面特征。
在已知路面信息的情況下能夠大幅提升車輛的平順性[14],但現有研究大多采用基于固定時序延遲的預瞄反饋控制,即將車輛前方路面信息作為系統的狀態變量,并認為車輛行駛過程中前后輪軌跡相同且保持固定時序[15]。此時,根據路面信息和車輛狀態可較為準確地計算懸架輸出阻尼力;當車速變化時,定常系統轉變為時變系統,由固定延時得到的路面預瞄時域信息與狀態空間系統不匹配。若在反饋控制中僅考慮車輛狀態,雖能避免上述問題,但難以有效補償路面干擾對被控量的影響,且易出現因控制器增益過高導致系統超調失穩的問題。同時,在轉向工況下同側各軸的車輪軌跡并不一致,前輪的路面預瞄信息無法適用于后輪。
與普通4輪車輛相比,8輪車輛主要擔負敵情偵查、人員輸送、后勤保障等軍事任務,需要在復雜多變的越野路面下保持較好的平順性[16]。因此,針對以上問題,首先以8 輪智能車輛為研究對象,建立整車半主動懸架11自由度模型,基于LQR 理論設計僅考慮狀態偏差的反饋控制器。然后提出一種基于狀態反饋和預瞄前饋的懸架控制器結構:建立車輪運動規劃模型和路面預瞄模型,計算車輪規劃軌跡點序號和懸架控制的延遲響應時間,保證懸架控制器準確獲取路面信息和執行器及時作動;設計考慮車輛前方路面信息和車輪規劃軌跡的類模糊預瞄前饋控制器,并與LQR 反饋控制器一并構成所提控制器。最后,基于MATLAB/Simulink 和Trucksim 聯合仿真平臺進行試驗驗證。結果表明,所提方法能夠在勻速轉向工況、變速直線工況、變速轉向工況和勻速直線工況下提高車輛的平順性。
1 基于懸架模型的反饋控制
1.1 整車半主動懸架模型
為了完整反映車輛的實際運動狀態,針對8 輪車輛搭建如圖1所示的整車半主動懸架11自由度模型,該模型包含車身的垂向、俯仰、側傾3 個自由度以及8 個車輪垂向自由度。圖1 中l為輪距,Li為第i軸中心到車輛質心處的距離,za為車身質心沿z軸運動的垂向位移,γa為車身繞y軸轉動的俯仰角,φa為車身繞x軸轉動的側傾角,zsij為懸架與車身鉸接點處的垂向位移,zuij為非簧載質量的垂向位移,zij為車輪處的路面激勵,Fij為懸架可調阻尼力(壓縮為正),ms為簧載質量,Jx和Jy分別為車身繞x軸和y軸的轉動慣量,muij為非簧載質量,kuij為輪胎垂向剛度,ksij為彈簧剛度,cij為減振器阻尼系數。其中,i∈{1,2,3,4}為車輛第i軸;j∈{1,2}為左側和右側車輪。

圖1 整車半主動懸架系統模型
定義懸架系統的彈簧力與阻尼力之和為
假設車身的俯仰角γa和側傾角φa都是小角度,則懸架與車身鉸接點處的垂向位移為
綜合式(1)~式(6),得到整車半主動懸架模型的狀態空間方程為
路面輸入量為
式中A、B、C、D、E、H為狀態方程的系數矩陣,易由式(1)~式(6)推導出,考慮到篇幅原因,本文未給出具體的矩陣。
1.2 CDC減振器阻尼力模型
本文采用CDC 減振器作為半主動懸架的執行機構,通過改變電磁閥開度來改變自身阻尼系數,其輸出的阻尼力Fij是控制電流I和懸架相對運動速度的函數:
在CDC 半主動懸架的控制中實際需要施加的控制量為電流I,將CDC 減振器阻尼力模型轉換為關于控制電流I的顯式,選用非參數模型進行表示,即
式中:A(I)為在控制電流I作用下CDC 減振器可以輸出的理論最大阻尼力為形狀函數。
其中
為阻尼力與理論最大阻尼力之間的關系,b0、V0為常數。
1.3 反饋控制器設計
車輛在行駛過程中車身存在垂向、俯仰和側傾運動,并且車輛動力學特性隨實際情況不斷變化,車輛的實際狀態往往與期望狀態存在較大偏差,須對狀態量進行補償修正。LQR能夠有效處理多優化目標問題,求解難度和運算成本較低,且具有良好的實時性[17]。因此,設計了基于LQR 的反饋控制器,用于修正車身垂向加速度、側傾加速度和俯仰加速度,以保證懸架控制器在不同行駛工況下的可靠性與適應性。
LQR 方法針對離散系統進行控制,設定控制步長為T,采用歐拉法將式(7)進行離散化,得到離散狀態方程為
式中:X(k)為k時刻的狀態量;U(k)為k時刻的控制量;W(k)為k時刻的路面激勵。
其中:
將車身垂向加速度、俯仰角加速度和側傾角加速度作為LQR控制器的性能指標,則目標函數為
式中q1~q3為加權系數。
將式(9)中目標函數轉化為矩陣形式:
式中:Q為狀態量權重矩陣;R為控制量權重矩陣。
定義LQR控制器的控制律為
式中K為控制增益系數。
假設存在常量矩陣P,使系統趨于穩定,則
式中P為如下Riccati方程的正定解:
2 半主動懸架控制器
為解決狀態反饋控制中存在的抗路面干擾能力弱的問題,本節構建基于狀態反饋和預瞄前饋的半主動懸架控制器,根據預瞄路面信息、車輪規劃軌跡點和垂向加速度計算前饋阻尼力,以消除路面干擾,減小控制量的波動性。
2.1 控制器結構
半主動懸架控制器結構如圖2 所示,根據車身垂向加速度、俯仰角加速度、側傾角加速度狀態量及其對應的期望狀態量得到狀態量偏差,設計LQR 控制器進行反饋控制,使狀態量追蹤期望值,得到反饋阻尼力。同時,將車輪規劃軌跡點與前方路面信息進行匹配,得到具有路面信息屬性的車輪規劃軌跡點,結合車輪規劃軌跡點、控制器延遲響應時間和車身垂向加速度設計前饋控制器得到前饋阻尼力。
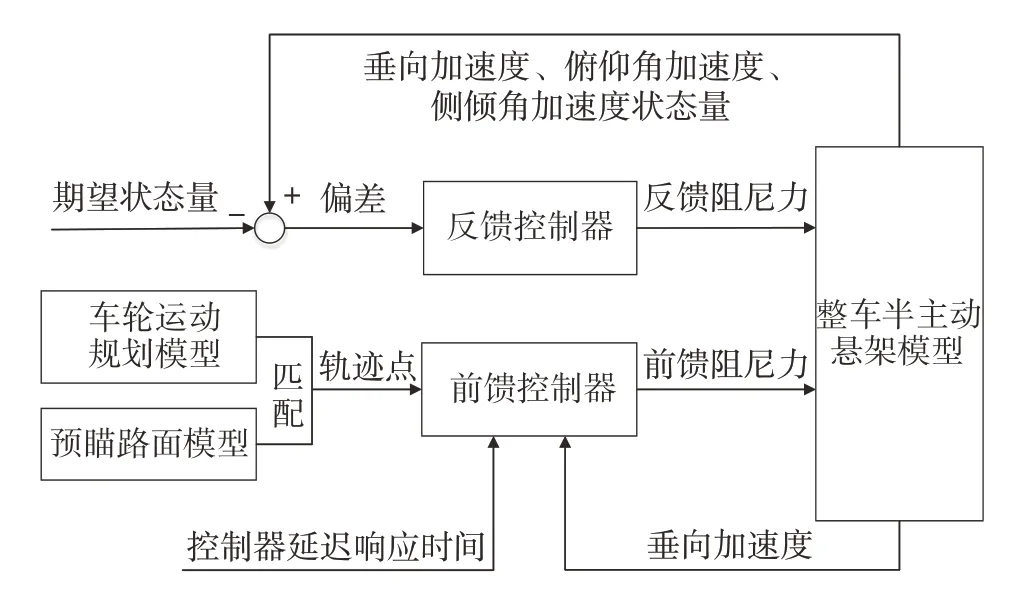
圖2 半主動懸架控制器結構圖
定義前饋控制系統的控制量為U′,反饋控制系統的控制量為U″,則懸架系統總控制量為
2.2 前饋控制器設計
2.2.1 車輪運動規劃模型
以u=(x,y,θ,v)表示智能車規劃軌跡點的狀態信息[18],其中,x、y分別為全局坐標系下車輛規劃軌跡點的橫縱坐標,θ為車輛規劃軌跡點的航向角,θ∈[-π,π],v為車輛規劃軌跡點的目標速度,Tw為車輛規劃軌跡點的采樣周期,n=1,2,…,N為第n個車輛規劃軌跡點,N為車輛規劃軌跡點的序號。
在已知車輛規劃軌跡前提下,建立車輪運動規劃模型,如圖3所示。除了與圖1相同的符號及其定義外,還包含的符號有:O為車輛的定位點(等效后軸中心),d為定位點與第4 軸的縱向距離,Q為光學傳感器(攝像頭、激光雷達等)安裝位置,位于車輛第1軸中心處。
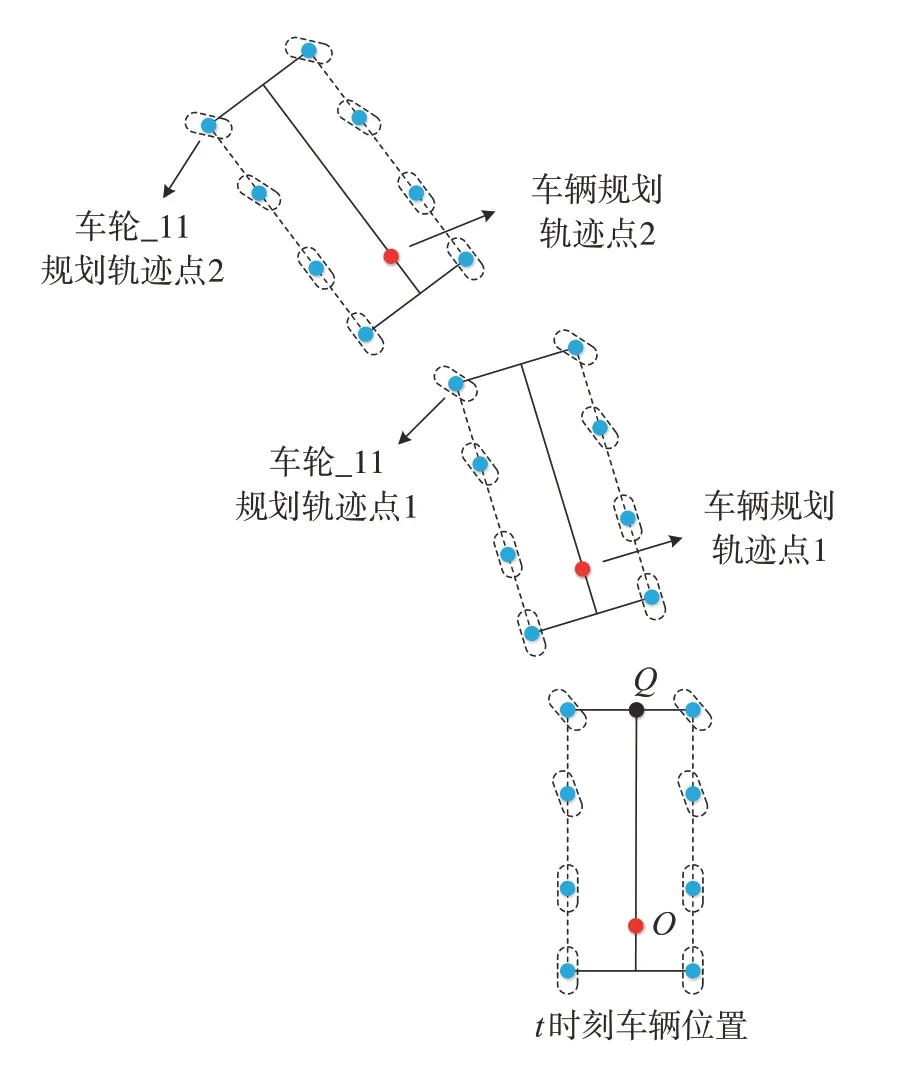
圖3 車輪運動規劃模型
假設以車輛左轉規劃軌跡為場景,以第1 軸車輪為例,車輪規劃軌跡點的全局坐標計算方法如下。
第1軸左側車輪規劃軌跡點的坐標為
第1軸右側車輪規劃軌跡點的坐標如下。
2.2.2 路面預瞄模型
利用車載光學傳感器感知路面信息,得到如圖4 所示的路面預瞄模型。其中,X′O′Y′為路面坐標系,原點O′為光學傳感器位置在路面上的垂直投影,橫軸O′X′為傳感器朝向。路面預瞄模型是一個三維柵格空間,柵格的4 個頂點具有坐標信息以及路面高程信息[19]。

圖4 路面預瞄模型
為實現車輪規劃軌跡點與車輛前方路面信息的匹配,需將路面坐標系X′O′Y′的信息轉換到全局坐標系下,坐標變換關系為
式中:X′、Y′為路面坐標系下路面激勵位置的坐標;X″、Y″為全局坐標系下路面激勵位置的坐標。
實際中,由于光學傳感器測量精度的限制,路面預瞄模型的分辨率不能完全滿足考慮車輪規劃軌跡的懸架預瞄控制要求。因此,為提高路面預瞄模型的分辨率,采用Kriging 方法[20]對空間分布數據進行無偏最優估計插值計算:
式中:λi為路面柵格點i的最小權重為柵格點i的路面高程為任意點的路面高程。
2.2.3 車輪規劃軌跡點序號和延遲響應時間
懸架控制器時滯包括懸架執行機構的作動時滯、控制信號的傳輸時滯和算法的計算時滯等。假設懸架控制器的時滯為τ,則輸入至懸架控制器的車輪規劃軌跡點序號為,其中表示向上取整。
懸架控制器時滯和車輪規劃軌跡點的采樣周期通常不是整除關系,因此懸架控制器的延遲響應時間須滿足:
將車輪規劃軌跡點與前方路面信息進行匹配,使軌跡點具備路面信息屬性Zij,n,然后根據懸架控制器的時滯τ和軌跡點采樣周期Tw的關系確定輸入至懸架控制器的車輪規劃軌跡點序號,無須依賴于前軸預瞄的路面信息。另外,車輛規劃軌跡點的采樣周期Tw固定,所以各車輪的規劃軌跡點間距隨車速動態變化,不再依賴相鄰軸車輪預瞄路面的時間差,實現了預瞄數據的充分利用并解決了時變車速下路面信息難以準確獲取的問題。
2.2.4 基于類模糊的預瞄前饋控制器設計
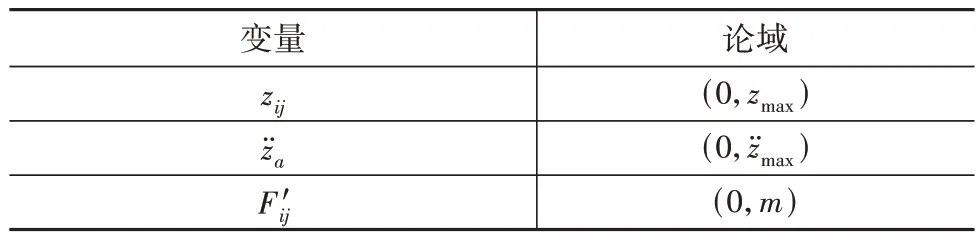
表1 變量論域
為減少計算量,采用類模糊方法,省略模糊化處理、模糊規則、解模糊等步驟,根據空間中不同線3點確定唯一平面的方法,確定路面激勵、車身垂向加速度和前饋阻尼力之間的關系。空間中不同線的3點為,則前饋阻尼力為
3 仿真分析
為驗證所提半主動懸架控制方法的有效性,基于MATLAB/Simulink 和Trucksim 建立了聯合仿真平臺。選取基于線性時變模型預測控制作為軌跡跟蹤方法[21],選取勻速轉向工況、變速直線工況、變速轉向工況和勻速直線工況作為試驗工況,與本文所提方法(方法一)、基于固定時序延遲的預瞄反饋控制方法(方法二)、被動懸架(方法三)、1.3 節中設計的基于狀態反饋的LQR 控制方法(方法四)進行對比試驗。選用路面為ISO-C 級三維路面[22],仿真參數為Tw=0.1 s、τ=0.35 s,方法二中同側前后輪預瞄路面信息相差的固定時間為0.11 s(車速10 m/s 下的固定延時),整車部分參數來自本校課題組研發的一款8輪無人車,如表2所示。
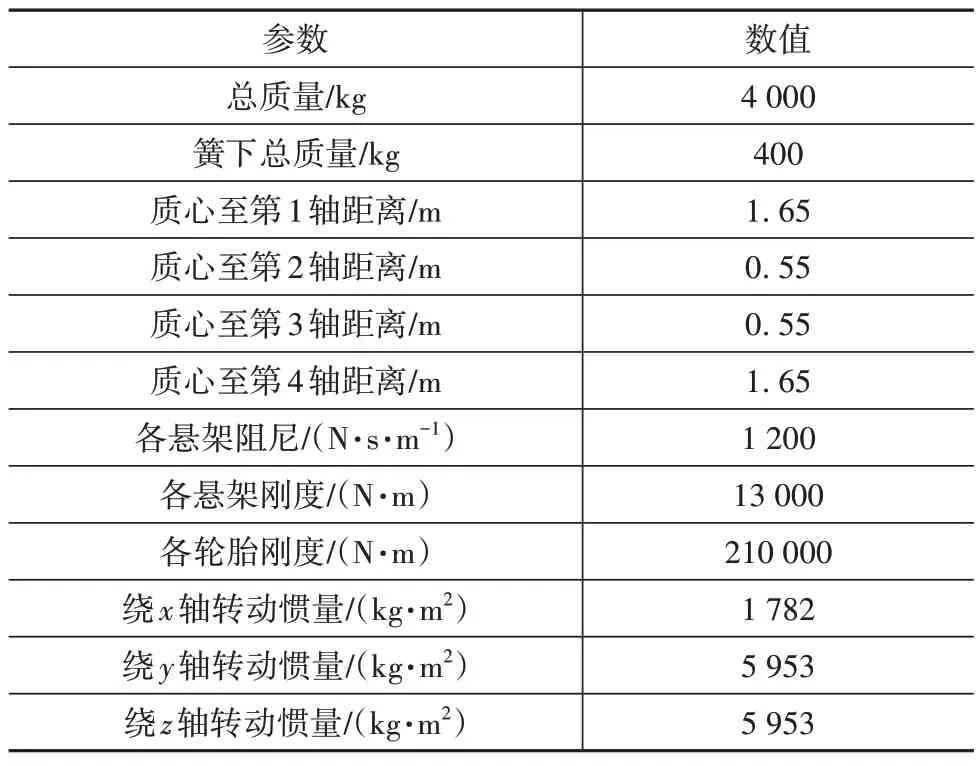
表2 整車部分參數
3.1 勻速轉向工況
為驗證所提方法在轉向時各軸同側車輪軌跡不一致性下的控制效果,在車速10 m/s 時在如圖5 所示的車輛規劃軌跡下進行方法一、二、三的對比試驗,得到如圖6 所示的試驗結果,性能指標的均方根值如表3所示。
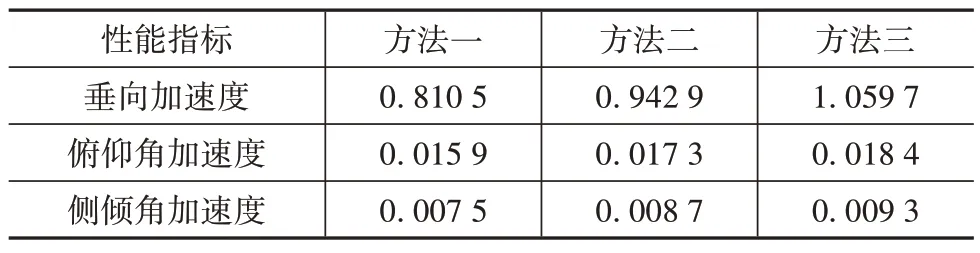
表3 性能指標均方根值
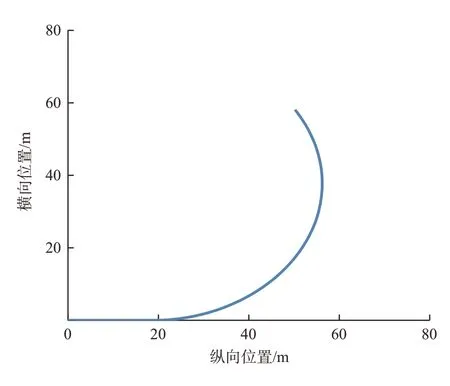
圖5 車輛規劃軌跡
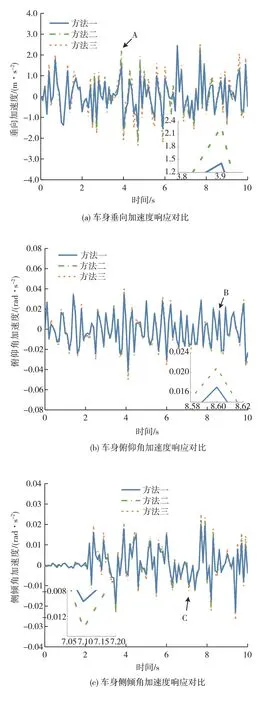
圖6 轉向工況仿真結果
由圖6 可知,采用方法一和方法二的半主動懸架在車身垂向加速度、俯仰角加速度和側傾角加速度3 方面的性能指標均優于被動懸架。而采用方法二的半主動懸架,在某些時刻的控制性能表現會低于被動懸架,如圖6(a)中A 點對應時刻、圖6(b)中B點對應時刻和圖6(c)中C 點對應時刻。由表3 可知,相較于方法二和方法三,采用方法一的半主動懸架各項性能指標均方根值分別降低了14.04%、8.09%、13.79%和23.52%、13.59%、19.35%。通過對比發現,在轉向工況下,各軸同側車輪軌跡具有不一致性,此時采用方法二的半主動懸架因輸入至懸架控制器的路面信息與實際各輪所經路面信息不相等,導致控制性能提升具有局限性,而考慮同側各軸車輪軌跡不一致性的控制方法得到更佳的改善效果,說明方法一的方案可行。
3.2 變速直線工況
為驗證所提方法在變速工況下的控制效果,在車速為5~12 m/s的直線加速工況下進行方法一、二、三的對比試驗,車速變化如圖7 所示,得到的試驗結果如圖8所示,性能指標的均方根值如表4所示。
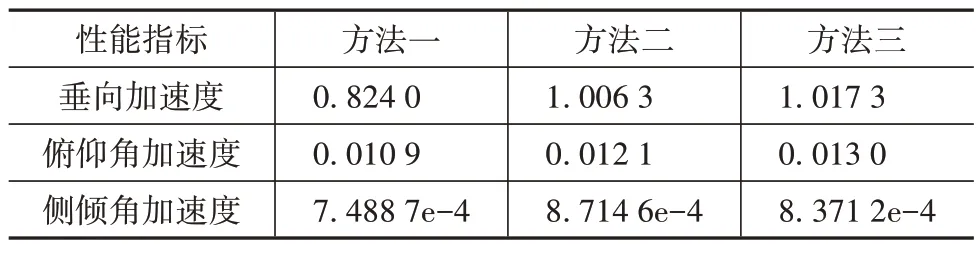
表4 變速直線工況性能指標均方根值
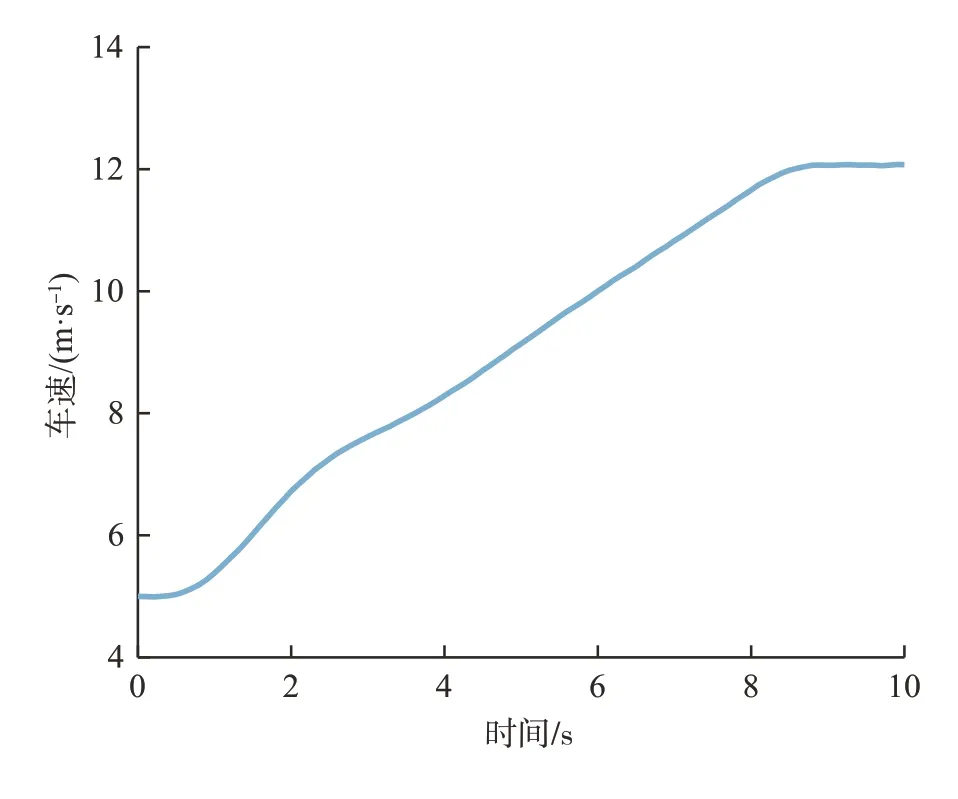
圖7 行駛速度
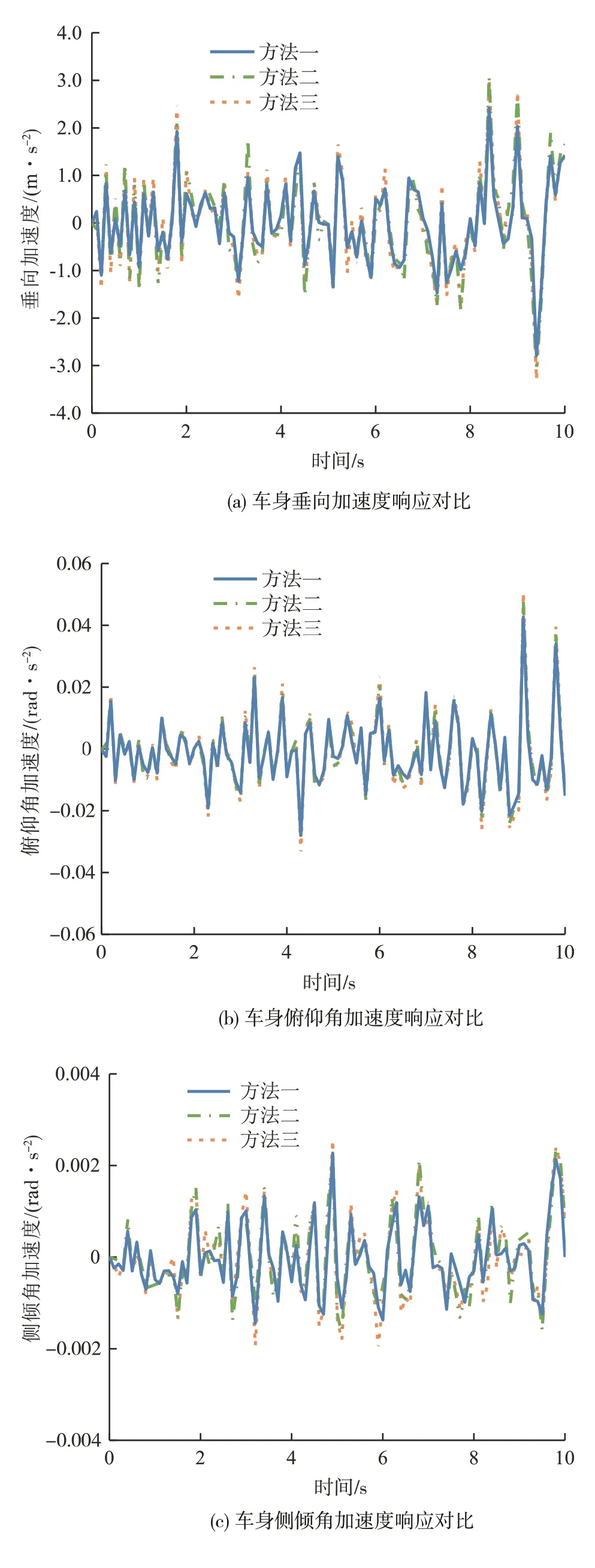
圖8 變速直線工況仿真結果
由圖7 可知,在5.5~6 s 時間段內,車速達到10 m/s,同側前后輪預瞄路面信息相差的固定時間與所需延遲時間大致相等,且在圖8 中,此時間段內方法二的性能指標曲線與方法一基本重合。同時,也可以看出方法二在其他時間范圍內的性能指標值多次高于方法三。由表4 可知,較于方法三,方法二的俯仰角加速度均方根值降低了6.92%,而側傾角加速度均方根值劣化了4.10%,說明變速工況下前后輪的軌跡時序為時變時,輸入至方法二的路面信息不再是實際各輪將要走過的路面信息,因此,方法二具有不穩定性和波動性。方法一利用車輪規劃軌跡點之間的間距隨車速動態變化的特點,解決了傳統預瞄控制依賴固定延時的問題,從而使各懸架獲得更為準確的路面信息,因此,采用方法一的半主動懸架表現出更為優異的控制性能。
3.3 變速轉向工況
為了驗證所提方法在一般工況下的適應性,選用變速轉向工況進行方法一、二、三的對比試驗,其中,車輛規劃軌跡如圖5所示,車速變化如圖7所示,得到如圖9 所示的試驗結果,性能指標的均方根值如表5所示。
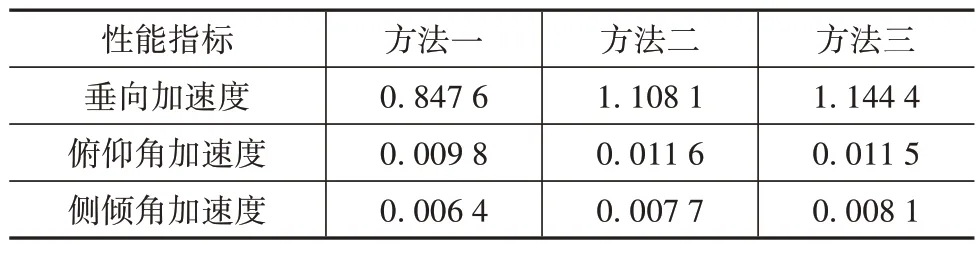
表5 變速轉向工況性能指標均方根值
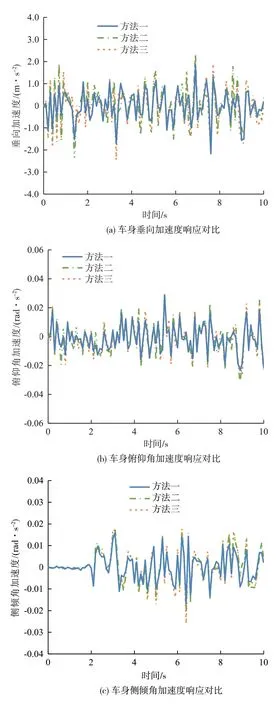
圖9 變速轉向工況仿真結果
由圖9 可知,采用方法二的半主動懸架在更多時刻控制性能表現得低于被動懸架,且在5.5~6 s時間段內,車速雖然達到10 m/s,但方法二的性能指標曲線與方法一相差較大。由表5 可知,相較于方法二和方法三,采用方法一的半主動懸架各項性能指標均方根值分別降低了23.51%、15.52%、16.88%和25.93%、14.78%、20.98%。同時,也可以看出方法二和方法三的各項性能指標均方根值基本相同,說明在變速轉向工況下,方法二的控制能力基本失效。結合表4和表5,相比于勻速轉向工況和變速直線工況,在變速轉向工況下方法一的控制性能提升更加明顯,說明了本文所提方法的有效性。
3.4 勻速直線工況
為驗證相比于基于狀態反饋的LQR 控制方法,基于狀態反饋和預瞄前饋懸架控制方法的優勢,在車速10 m/s的直線工況下進行方法一、三、四的對比試驗,試驗結果如圖10 所示,性能指標的均方根值如表6所示。
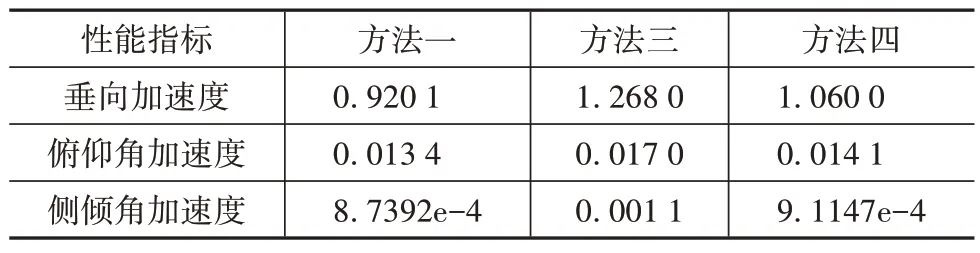
表6 勻速直線工況性能指標均方根值
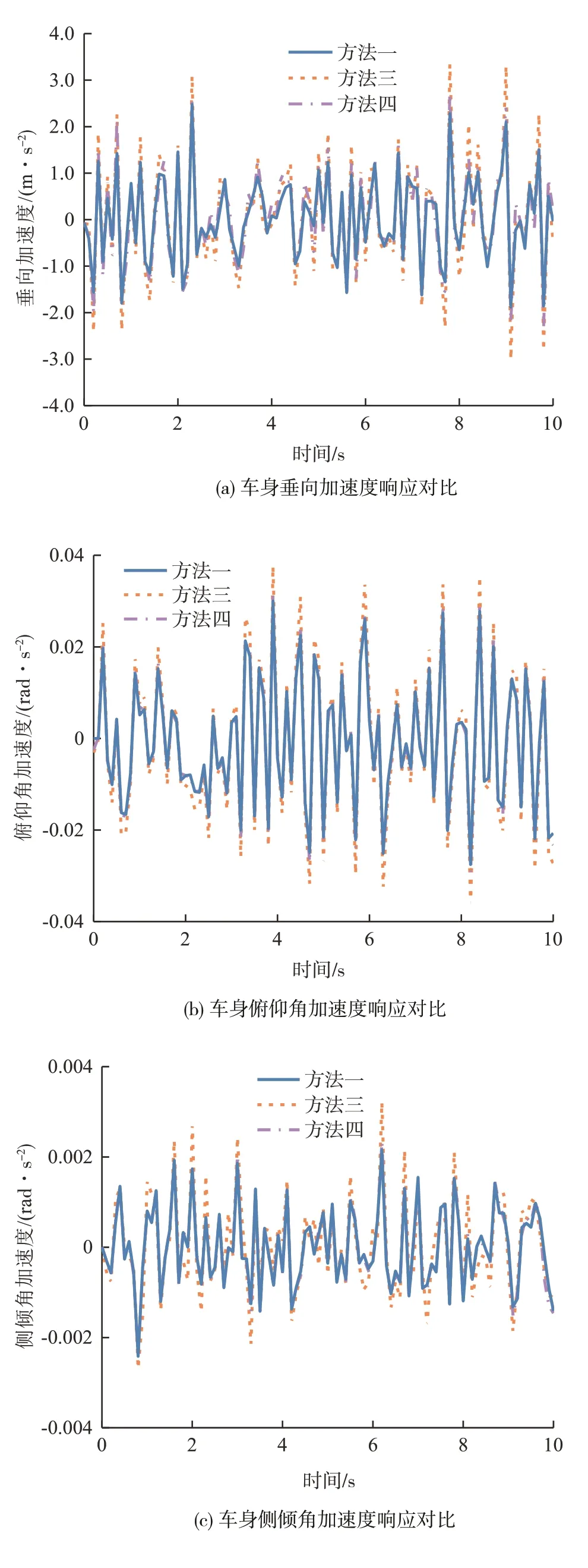
圖10 勻速直線工況仿真結果
由圖10和表6可知,與方法三和方法四相比,方法一的垂向加速度均方根值降低了27.44% 和13.20%,俯仰角加速度和側傾角加速度均方根值分別降低了21.17%、20.55%和4.96%、4.12%,提升效果不如垂向加速度指標明顯。這是因為本文所提前饋控制器是根據路面激勵和車身垂向加速度大小來調節前饋阻尼力,以達到消除路面干擾的目的,俯仰角加速度和側傾角加速度指標的提升歸因于前饋控制對路面干擾的抑制。因此,本文所提懸架控制方法能進一步提高車輛的平順性。
4 結論
本文以8 輪智能車為研究對象,充分利用智能車的環境感知、定位導航、運動規劃、軌跡跟蹤等功能,提出了一種基于狀態反饋和預瞄前饋的半主動懸架控制方法。根據垂向加速度、俯仰角加速度和側傾角加速度的狀態偏差設計了LQR 反饋控制器。同時,為消除路面干擾,提高懸架控制器在不同行駛工況下的可靠性與適應性,設計了一種基于路面預瞄和車輪規劃軌跡的類模糊前饋控制器,并與LQR反饋控制器一并構成所提半主動懸架控制器。基于MATLAB/Simulink 和Trucksim 聯合仿真平臺進行試驗分析,與被動懸架、基于固定時序延遲的預瞄反饋控制和基于狀態反饋的控制方法相比,所提控制方法的各項性能指標均有優化,驗證了所提控制方法在提高8輪智能車輛平順性方面的優勢。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
兒童故事畫報(2019年5期)2019-05-26 14:26:14
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
中國工程咨詢(2016年4期)2016-02-14 07:28:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
