無人機巡檢技術研究與應用
2023-05-29 09:24:02李寧
電子技術與軟件工程 2023年7期
李寧
(廣州南方衛星導航儀器有限公司 廣東省廣州市 510000)
隨著無人機技術的飛速發展,它們在架空輸電線路上的應用越來越廣泛,發揮出了越來越大的作用。為了提升架空輸電線路的運行效率和質量,以滿足當今社會對安全可靠的要求,線路運檢人員應該積極探索和利用無人機技術,以實現對日常巡檢的有效監控,從而推動行業的可持續發展。隨著科技的迅猛發展,無人機技術已經取得了巨大的成就,并被廣泛應用于各種領域[1]。無人機的硬件和軟件設備也日益完善,特別是在輸電線路的檢測方面,它們可以有效地克服傳統檢測方式的局限性,及時發現線路運行中的潛在危險,特別是在惡劣的天氣狀況和復雜的地形環境下,能夠迅速收集現場信息,減少維護人員的損失,極大地提升了檢測的效率。
1 巡檢無人機系統要求
1.1 使用環境要求
無人機巡檢系統應滿足如下要求:
(1)起飛海拔高度:1000m ~3000m 符合GB/T20626.1 的規定;
(2)實用升限:3500m;
(3)工作溫度:-15℃~+55℃;
(4)相對濕度:≤95%(+25℃);
(5)在極端的降雨(雪)天氣中,飛機可以安全地短暫停留;
(6)防潮濕、防鹽霧、防霉菌設計符合相關標準規定。
1.2 固定翼無人機性能要求
(1)有效載荷重量:≥1kg;
(2)最大續航時間:≥1h;
(3)最小作業真高:100m;
(4)巡航速度:≥70km/h;
(5)航程:≥70km;
(6)抗風性能最低要求:10m/s(距地面2m 以上,瞬時風速);
(7)飛行中水平位置控制精度:≤5m,飛行中垂直位置控制精度:≤10m;
(8)電磁兼容性符合GB/T17626.5 的規定;
(9)應能承受正常操作、發射、回收、飛行中所遇到的振動、沖擊、加速度。
1.3 起降方式要求
(1)宜采用垂直方式起飛,可采用滑跑、彈射、車載等方式起飛。
(2)采用彈射方式起飛的固定翼無人機應能承受彈射時受到的沖擊,彈射架應便于操作和運輸,重量不宜過大。
(3)降落時應采用垂直方式,可以通過滑行、機腹擦地、傘降和撞網等方式實現。
(4)固定翼無人機在降落時,機腹擦地處應當采用耐磨材料,以確保任務載荷、測控通信設備(包括天線)、發動機、電池等關鍵零部件能夠得到有效的保護,避免受到外力的直接沖擊。
(5)固定翼無人機在傘降過程中,必須采取有效的防護措施,以確保任務載荷、測控通信設備(包括天線)、發動機、電池等關鍵部件免受外力的沖擊。
(6)固定翼無人機在撞網降落時,機身結構應當采用后置螺旋槳,以確保任務載荷、測控通信設備(包括天線)、發動機、電池等關鍵零部件能夠得到有效的保護和維護。
1.4 任務載荷性能要求
1.4.1 可見光相機性能要求
(1)有效像素:≥2400 萬;
(2)當作業高度達到200m 時,成像質量可以準確識別航線兩側各100m 范圍內的0.5m*0.5m 的靜態目標,從而確保航行安全。
1.4.2 可見光攝像機性能要求
(1)有效像素:≥1280(H)×720(V);
(2)光學變焦倍數:≥10;
(3)當作業高度達到200m 時,能夠準確地捕捉到航線垂直方向上兩側各100m 范圍內的3m*3m 的靜態目標,從而獲得優質的影像。
1.4.3 紅外熱像儀性能要求
(1)分辨率:≥640(H)×480(V);
(2)熱靈敏度:≤65mK;
(3)幀率:≥25fps;
(4)視頻輸出格式:PAL;
(5)空間分辨率:優于1.5mrad。
1.5 測控通信設備性能要求
(1)通視條件下,測控通信距離:≥20km;
(2)圖像傳輸速率:≥2Mbps;
(3)誤碼率:≤10-6;
(4)通視條件下,測控通信響應時間,上行時延≤20ms,下行時延≤400ms。
1.6 地面站性能要求
(1)體積:≤500mm(L)×400mm(W)×250mm(H);
(2)重量:≤15kg;
(3)額定功率:≤80W;
(4)在額定功率下,電池供電的工作時間應該超過5h;
(5)在待機狀態下,電池供電的運行時長應超過10h;
(6)整體防護等級:不低于IP64 符合GB/T4208的規定。
1.7 電磁兼容性要求
(1)根據GB/T17626.5 的要求,電磁兼容性設計必須滿足500kV 及更高的交直流輸電線路的100m 范圍內的安全性和可靠性;
(2)為了保證電纜的安全性,建議使用雙層屏蔽同軸電纜,并使用雙絞線來傳輸控制信息;
(3)具有良好雷擊浪涌抗擾度能力[1]。
1.8 可靠性要求
(1)可靠性工作的項目和要求符合相關標準規定;
(2)可靠性設計符合相關標準規定;
(3)飛行控制系統平均無故障時間:>150h;
(4)發動機平均無故障時間:>150h;
(5)發動機使用壽命:>1000h;
(6)動力電池充放電次數:≥300 次;
(7)由于其優異的導通性和穩定的連接,動力電池接頭的外部絕緣強度也得到了顯著提升;
(8)軟件安全性措施方面應符合機載軟件安全性相關規定。
1.9 操作性要求
(1)系統展開時間應小于20min;
(2)系統撤收時間應小于10min;
(3)為了避免混淆,電氣連接必須清晰地標示;
(4)零部件更換應方便、快捷。
1.10 維修性要求
(1)為了確保工作效率,應該提供合適的工作區域和操作空間,以便于訪問;
(2)應盡量采用標準件和模塊化設計,提高設備、組件的互換性[2];
(3)應盡可能降低維修技能要求,除少數故障需要專業人員外,其它故障均可由用戶完成維修;
(4)其它維修性要求符合相關標準規定。
2 巡檢無人機系統構成
隨著無人機技術的不斷進步,能夠完成復雜任務的無人機系統已經發展出了多個分支機構[2],其中包括:
(1)無人機由多個部件組成,包括機身、推進系統、操縱和維護設施。
(2)該任務設備包括:戰斗監控、電子防御、通信中繼、攻擊指揮、電子偵查、核生化探測、戰場測繪和靶標設備。
(3)通過無線電遙控/遙測技術、信息傳輸技術和中繼轉發技術,可以實現對測控和信息傳輸的全面管理。
(4)飛行控制與管理系統由多種功能組成,包括:實時的數據顯示、地形圖、航線軌跡、任務安排、記錄、重現、情報分析、數據傳輸,還有各種數據傳輸和數據交換接口。
(5)發射與回收系統由多個部件組成,其中包括發射車、發射箱、助推器、起落架、回收傘、攔阻網等,這些部件的協同工作使得發射與降落的過程能夠順利進行。
(6)維修系統包括基層級和基地級,旨在保障設備的正常運行。
無人機系統是一種用于執行特定任務的機器,它能夠通過遙控和遙測技術來接收信息并將其傳送到目標地點[3]。
3 無人機自主巡檢技術應用
3.1 反無人機GPS欺騙技術
目前應對無人機的最常見手段包括:利用雷達、無線電頻譜探測器、光學設備、干擾機以及GPS 等設備[3],來實現有效的監控、檢測、攻擊、干擾以及欺騙等,如圖1 所示。但是目前普遍存在的問題在于:
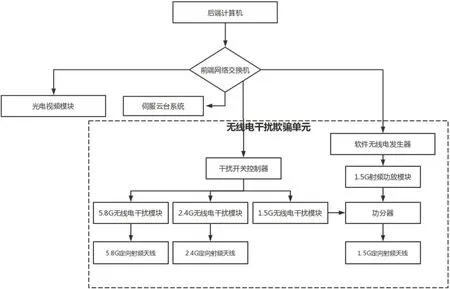
圖1:無人機GPS 欺騙誘捕方法與流程
(1)無人機飛控系統已經逐漸引入反GPS 欺騙算法,GPS 誘騙難度逐漸增高[4];
(2)對無人機飛手定難、抓捕難的問題始終沒有解決。
3.2 圖像預處理技術
(1)圖像預處理:對無人機傾斜攝影獲取的圖像進行切分、去噪、糾正等預處理操作,提高后續處理的準確度和效率[5]。
(2)特征點提取:利用計算機視覺算法提取出每張圖像中的特征點,并對其進行匹配,以實現三維建模。
(3)點云處理:將無人機傾斜攝影獲取的數據轉換成點云格式,對點云數據進行濾波、去除噪點、采樣、配準、重建等處理操作。
(4)模型生成:利用點云數據生成三維建模模型,可采用多種方法,如多視圖立體匹配、三角網格生成、體素填充等。
(5)后處理:對生成的三維模型進行后處理,包括紋理映射、網格優化、貼圖等操作,以提高模型質量和視覺效果。
(6)分析與應用:根據需求對三維模型進行分析和應用,如計算體積、提取特征、導入到GIS 系統中等。
3.3 無人機航跡規劃技術
通過對任務目標的精確定位和優化,航跡規劃可以為無人機提供一個完美的、符合約束條件的飛行路徑,這也是其最重要的組成部分[6]。采用GPS/INS 組合導航系統,無人機可以有效地規劃出最優的飛行路線,從而減少地圖誤差和隨機環境的干擾,同時還能夠實現自主調整,有效地防止遭遇敵對目標,從而確保安全地完成指定的任務[7]。通過分析周圍的環境因素,如風場、敵方雷達掃描范圍、導彈高炮打擊威脅區以及地形,可以制定出最佳的無人機航跡規劃方案,這需要考慮到多種因素,如飛行器的約束條件、航跡規劃器和自動駕駛儀。
3.4 數據安全防護技術
3.4.1 載荷安全防護
通過采取軟件檢測方法,能夠有效地識別出無人機系統的載荷,從而確保其完整性、可靠性,并且采取相應的措施,如加強慣性傳感器和GPS 傳感器的防護[8],從而提高無人機的安全性。
通過調整控制常量,能夠更準確地了解無人機的運動規律,因為它們受到無人機的物理特征的影響,包括重量、軸心距、底層控制算法、慣性和重力。如果無人機的航跡超出了其規定的范圍[9],那么可以斷定它遭遇了欺詐性的攻擊。由于無人機載荷眾多,IMU 和GPS傳感器容易受到欺騙攻擊,因此,研究和開發有效的防護技術顯得尤為重要,以確保無人機的安全性和可靠性。隨著新一代攻擊手段的不斷涌現,光流、雷達、ADS-B等載荷也面臨著更大的威脅,因此,開發有效的防護技術,以確保載荷的安全性,已經成為當今研究領域的一個重要課題。
3.4.2 軟件安全防護
在工業控制領域,漏洞檢測通常采用灰盒技術或黑匣子技術。通過灰盒方法,可以在充分理解目標的基礎上,進行二進制插樁、動態污染源檢測、漏洞檢測以及其他相關技術;通過使用黑盒技術,可以在沒有充分信息的情況下進行漏洞檢查,這是一種常見的模糊測試技術。無人機系統的漏洞檢測和防御技術類似于工業生產,一般會使用黑匣子或灰匣子的方法,這些方法包括控制流完整性、模糊測試(Fuzzing)、內存隔離等,旨在提高系統的安全性和可靠性。
3.5 霍夫變換效果
霍夫變換可以用來精確地描述和預測斷點的邊緣特征。該方法利用將二維圖像從原始狀態轉換為參考狀態,從而實現對直線和曲線的有效擬合。如Hough 所述,圖像空間x-y 中,斜率為a,在y 軸截距為b 的直線方程為:y=ax+b。
3.6 智能優化路徑規劃算法
3.6.1 啟發式尋優搜索
啟發式搜索可以幫助更快地找到目標,它可以通過評估狀態空間中的搜索結果,找出最優解,并且可以節省搜索時間,提高效率就是其中之一。
3.6.2 遺傳算法
遺傳算法(GA)被廣泛應用于解決復雜問題,它以其高效率和穩健的特點而聞名。這種算法利用染色體的重組、轉錄和變異來創建一系列新的基因組,然后根據這些基因組的表現來評估它們的性能,以達到最佳的結果。
3.7 神經網絡方法
Hopfield 網絡借鑒“能量函數”的理念,通過采用特殊的非線性動態結構,使得它能夠在達到穩定狀態時,將能量降至最低,從而有效地解決優化等技術難題。可以將地形信息轉化為可用于航跡規劃的參數,并利用擴展的Hopfield 模型和無人機約束條件來實現安全和合理的航跡規劃。這種方法可以幫助更好地跟蹤和避開地形,從而提高航行效率[10]。
4 結語
隨著技術的發展,越來越多的電力企業正在采用無人機來完成架空輸電線路的巡檢,而不再依賴傳統的手工操作,從而實現智能化的飛行。在探索線路的過程中,為了達成最佳效果,必須先讓無人機飛至指定的高度,并且根據實際情況精確地調節拍攝角度。海量數據處理、巡檢缺陷圖像自動識別等前沿技術的不斷進步,無人機巡檢的應用將得到極大的提升,從而有效地解決實際生產中的問題,確保輸電線路的安全可靠運行。
