基于單片機STM32的搬運機器人控制系統設計與實現
2023-05-24 05:35:02付裕
無線互聯科技 2023年5期
付裕
摘要:針對傳統搬運機器人存在的工作范圍狹窄、只能工作于平坦地形等問題,文章提出一種將STM32單片機作為核心結構的控制系統,采用型號為NRF24L01的無線傳輸模塊,使有效傳輸距離超過100 m,滿足STM32單片機對電壓的實際需求。為保證搬運機器人的靈活性,將人類手臂的分關節靈活彎曲工作特點作為主要依據,建立六自由度關節型機械臂。該機器人具有較高的使用價值,可最大限度地節約人力以及時間成本,實現生產線搬運的智能化、高效化發展。
關鍵詞:STM32單片機;搬運機器人;六自由度機械臂;工位呼叫器
中圖分類號:TP242文獻標志碼:A
0 引言
隨著我國科技的迅速發展,工業領域逐漸走向智能化。由于機器人可以在極其惡劣的環境下高效完成電氣焊接、流水線以及高空作業等工作,具有較強的工作穩定性,越來越多的機器人被廣泛應用于工業生產的多個領域,替代人類完成各項高危工作。但是傳統搬運機器人主要采用固定式或輪式平臺進行設計,該方式對于機器人的移動范圍具有局限性,只能將其應用于平坦地形。為此,本文提出一種基于單片機STM32的搬運機器人控制系統設計方案,方案將人類手臂的分關節靈活彎曲工作特點作為主要依據,建立六自由度關節型機械臂,使機器人的可控角度更大。
1 基于單片機STM32的搬運機器人控制系統總體設計
1.1 搬運機器人控制系統總體方案
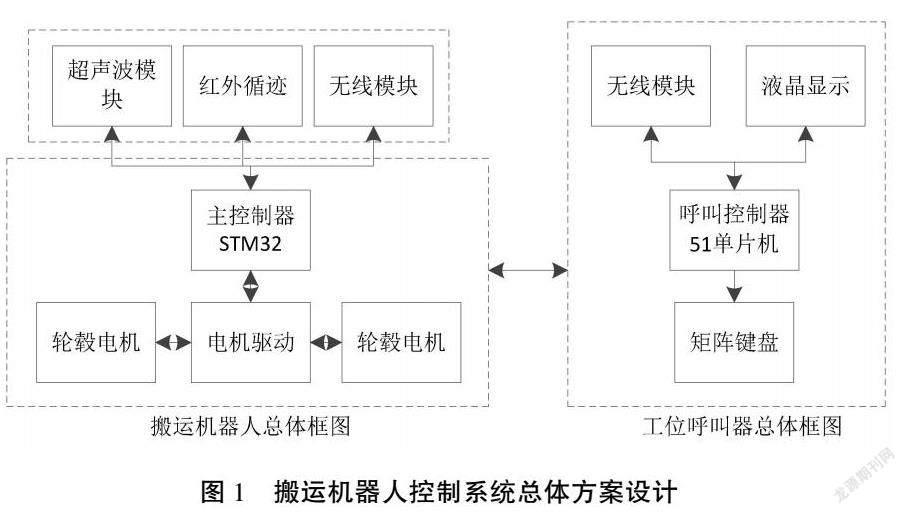
為了實現搬運機器人的整體控制,在對控制系統進行設計時,可以分為移動控制和機器人與工位呼叫器通信兩部分。其中,移動控制部分主要負責控制搬運機器人的移動路線;工位呼叫器通信部分主要負責建立機器人與外界的聯系,有利于操作者實時掌握搬運機器人的工作狀態,搬運機器人控制系統總體方案如圖1所示[1]。
搬運機器人控制系統的工作流程為:通過工位呼叫器喚醒停靠在車間坐標原點的搬運機器人,使搬運機器人恢復工作狀態,由操作者利用工位呼叫器向搬運機器人的控制中心發送搬運指令,當指令最終到達機器人的目的工位坐標后,搬運機器人會成功接收指令,然后根據循跡算法控制自身移動路線,以此實現搬運的目的。在循跡算法的支持下,搬運機器人控制系統具有循跡、避障以及無線收發等功能。搬運機器人到達指定地點后,工人將需要搬運的產品放置于機器人的托盤上,按下機器人機身的搬運鍵,機器人可按照系統設定路線完成產品搬運。若機器人在產品搬運期間接收到來自工位呼叫器傳輸的新指令,則返回初始位置,完成下一次搬運任務[2]。
1.2 搬運機器人控制系統結構設計
搬運機器人的核心結構為關節型機械臂,機械臂有利于提高搬運機器人整體活動的靈活性,實現對產品的精準搬運。為了保證搬運機器人工作的靈敏度,對搬運機器人的關節型機械臂結構進行設計時,將人類手臂的分關節靈活彎曲工作特點作為主要依據,設計出一種六自由度機械臂。基于六自由度的關節型機械臂可對產品進行精準定位及抓取,具有較高的靈活性和精準性。機械臂的結構主要包括基座、手臂、手腕以及夾持器,為實現機械臂各部分結構的緊密相連,采用多個合金支架,利用螺絲將機械臂的結構組成零件與舵機建立連接。機械臂與舵機成功建立連接后,可通過搬運機器人控制系統的控制器對每個舵機進行控制,達到搬運物品的目的。
2 基于單片機STM32的搬運機器人控制系統硬件設計
2.1 STM32單片機的最小系統與感知電路
對搬運機器人的核心結構進行設計時,主要采用STM32F103C8T6主流控制器芯片,該芯片可對搬運機器人的電機驅動電路、紅外循跡、避障功能電路等部分進行精準控制。其閃存為64 KB、供電電壓為3.3 V、主頻達到72MHz。內部包含48個引腳,搬運機器人控制系統可使用的GPIO超過32個。搬運機器人控制系統在STM32單片機的支持下,可實現對移動范圍的精準控制,有利于提升機器人的工作效率,滿足對搬運機器人控制系統的設計要求[3]。
本文設計的搬運機器人主要面向寬約8m、長約20m、占地面積約160m2的生產線,為實現控制系統中無線通信模塊的有效傳輸,應結合勾股定理,將該模塊的傳輸距離控制在22m以上。但是該模塊對短距離數據進行傳輸時,無法達到有效通信的目的。將該模塊與短距離無線通信模塊進行對比可知,短距離無線通信主要采用型號為NRF24L01的無線傳輸模塊,該模塊內存為2.4G,有效傳輸距離超過100m,供電電壓為3 V~5.5 V。將該模塊與STM32單片機建立連接,并使用SPI總線通信方式中的PA4-PA9引腳與NRF24L01無線模塊連接在一起,可滿足STM32單片機對電壓的實際需求。
由于搬運機器人主要通過紅外循跡傳感器識別路徑實現物品搬運,為此選用XD-201型號的紅外循跡傳感器,該傳感器具有四路循跡功能,識別距離為2cm~30cm,檢測角度為35°,供電電壓為3 V~5 V,滿足搬運機器人控制系統的設計要求。為最大限度地降低搬運機器人搬運物品過程中出現碰撞現象,需要搬運機器人具備實時避障功能。但是紅外循跡傳感器易受外界光線干擾,遇到物品為透明狀態或者存在圓形凸物時,該傳感器的避障功能可能存在失效情況。為解決搬運機器人的避障功能缺陷問題,采用PB8-PB9兩個引腳分別對超聲波模塊視為Trig和Echo兩個引腳進行控制,該模塊型號為RCWL-1601,檢測距離為2cm~450cm,供電電源為3.3 V~5 V 。
2.2 搬運機器人控制系統的電機驅動電路
當搬運機器人處于實際工作狀態時,托盤內部放置的溫控產品為1kg~4 kg。為保證搬運機器人可承載物品勻速前進,需要向機器人內部輸入足夠的電機驅動電流以及堵轉扭矩,其數值至少大于4kg·cm,該數值下的電機驅動電流以及堵轉扭矩可成功驅動輪轂前進。對電機驅動電路進行設計時,采用型號為L298n的電機驅動芯片,該芯片可持續穩定輸出2A電流,最高工作電壓高達50 V。對電機驅動電路的輪轂設備進行選擇時,采用型號為ZGB38RG的直流減速電機,該電機供電電壓為12 V,扭矩可達6.5kg·cm。在實際電路設計過程中,應向其中添加10 μF和104電容,以此作為濾波電容。
2.3 搬運機器人控制系統工位呼叫器電路
工位呼叫器電路主要采用STC15W408AS主控芯片作為核心部分,選擇SOP28進行封裝。STC15W408AS主控芯片憑借較少的外圍電路、8K閃存、512字節SRAM以及SPI總線資源,使該芯片被廣泛應用于無線傳輸模塊中,有利于實現對NRF24L01無線模塊的控制,并且STC15W408AS主控芯片只要插入電源即可工作。工位呼叫器主要使用矩陣鍵盤完成目標工位號的輸入,對于成功輸入的目標工位號,可通過LCD1602液晶顯示器完成目標工位號及對應工位號崗位的顯示。為了保證搬運機器人能夠準確地根據坐標實現路徑規劃,利用STC15單片機將采集信息譯碼成搬運機器人可識別的坐標,最后將譯碼完成的坐標數據發送至無線傳輸模塊,由無線傳輸模塊將坐標發送至機器人。
3 基于單片機STM32的搬運機器人控制系統軟件設計
3.1 搬運機器人軟件控制系統總體設計
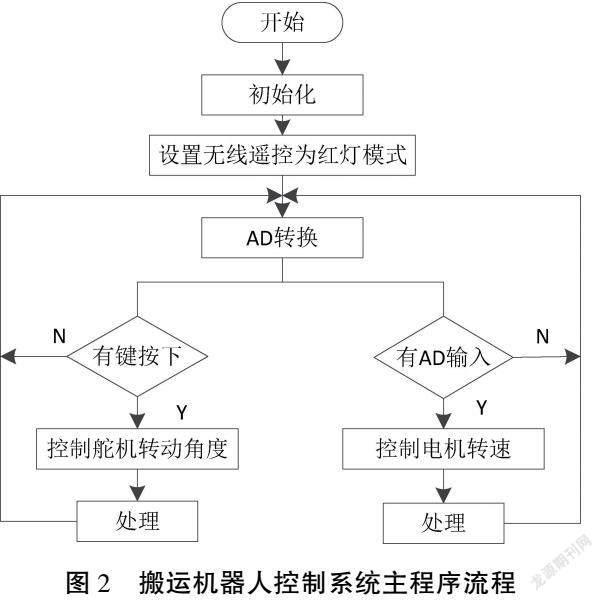
搬運機器人的控制系統主要由主程序進行控制,其運作流程為:首先應對系統內部各個模塊以及用到的芯片進行初始化設置;其次,初始化完成后,將無線遙控部分設置為紅燈模式,并通過AD轉換實現對搬運機器人舵機轉動角度以及電機轉速的控制,該操作屬于無線循環過程,直至所有物品搬運完畢后,用戶可通過控制系統讓機器人回歸到初始位置,使機器人處于待機狀態。其中,初始化設置指的是對時鐘、I/O接口、PS2無線遙控以及各個定時器等設備的配置。為了實現對控制系統主控板的整體控制,在主控電路中配置了PWM模式定時器,該定時器主要通過改變占空比,實現脈寬調制,從而達到控制主控板的目的,搬運機器人控制系統主程序流程如圖2所示[4]。
3.2 搬運機器人控制系統定時器配置程序
定時器的配置流程為:首先完成對結構體的定義,并配置定時器的周期參數以及分頻參數,各項參數均配置完畢后,對定時器的運作模式進行選擇,最后使各項參數可通過PWM波通道完成輸出。對定時器進行初始化時,需要對void setup_dj_timer(void)函數進行配置,通過該函數即可配置一個向上計數的PWM波,由PWM波完成參數的傳輸。
3.3 搬運機器人控制系統GPIO電平反轉程序
GPIO電平反轉程序在控制系統中主要負責對機器人舵機轉向進行控制,在控制舵機的正轉和反轉過程中,可利用void tb_gpio_init(void)函數作為核心函數,通過switch語句中12個不同分支的case語句中的任意兩句,即可完成對機器人舵機電平狀態的整體控制。若控制過程中出現舵機占空比的數值傳遞給定時器中的預裝載值時,可利用PS2手柄上的按鍵對占空比進行改變,使占空比對應的舵機產生轉動,從而達到控制搬運機器人各個舵機的目的,有利于實現對物品的搬動。
3.4 搬運機器人控制系統無線通信模塊程序
無線通信模塊程序的運作流程為:首先完成該模塊端口的初始化;其次利用void setup_ps2(void)函數建立機器人控制系統內部主板與手柄之間的通信,通信建立成功后,對PS2手柄進行初始化配置。由于PS2手柄包含兩種工作模式:紅燈、綠燈,為此本文經過對比分析,最終選用紅燈工作模式完成搬運機器人控制系統的無線通信功能。PS2手柄采用紅燈工作模式時,利用void loop_ps2_data(void)函數對手柄上的數據進行讀取,讀取過程為循環狀態,數據讀取完畢后,向主機發送命令,由下位機接收命令并返回數據,主機可對返回的數據進行處理,將得到的兩次按鍵值進行對比,即可判斷是否產生動作[5]。
3.5 搬運機器人控制系統工位呼叫器軟件程序
3.5.1 呼叫器鍵盤與顯示程序
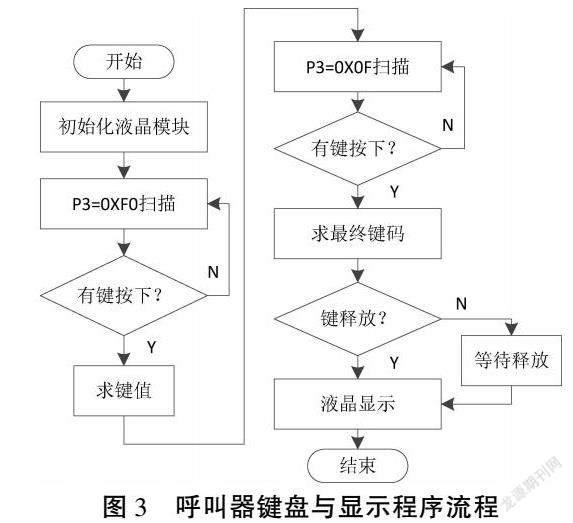
對搬運機器人控制系統的呼叫器鍵盤與顯示程序進行設計時,首先應對液晶顯示模塊進行初始化,并通過P3口的8個引腳對呼叫器鍵盤進行掃描,掃描完畢后即可確定按鍵碼。若判斷存在按鍵按下,則單片機讀回的P3口數值不等于0×F0,該數值即可確定第幾行被按下。將P3口數值設置為0×F0,利用單片機對P3口數值進行判斷,若其數值不等于0×F0,可確定第幾列被按下。綜合行與列的數值,即可獲取按鍵碼,最后通過液晶顯示器LCD1602顯示該數字。呼叫器鍵盤與顯示程序流程如圖3所示。
3.5.2 呼叫器無線發送程序
呼叫器無線發送程序主要建立于SPI總線協議上進行,其發送流程為:首先對NRF24L01無線模塊進行初始化,將初始化數據發送至TX_BUF,對呼叫器無線發送程序的發送模式進行設置,若數據成功發送,即可清除FIFO;若數據發送失敗,則返回上一級,重新發送數據,直至發送完成后停止操作。數據發送過程中,需要CE=1的持續時間為10 μs,持續130 μs后啟動發射,數據發送結束后,CNS=1關閉使能,呼叫器無線發送模塊自動轉為接收模式,等待應答信號。
4 結語
為提升生產線的工作效率,本文設計了一種基于單片機STM32的搬運機器人控制系統,該控制系統將人類手臂的分關節靈活彎曲工作特點作為主要依據,建立核心結構為六自由度的關節型機械臂,選用XD-201型號的紅外循跡傳感器對路徑進行識別,通過機械臂有利于提高搬運機器人的整體靈活性與物品搬運的精準度。該搬運機器人控制系統不僅能夠替代人工模式進行高危環境下的搬運作業,而且能夠通過智能化的操作節約生產線工作成本,在工業生產領域有一定的實用價值。
參考文獻
[1]王媛媛,劉海龍,蔡逸鋒.基于單片機的吸附式倉儲搬運機器人研發[J].機電信息,2020(5):85,88.
[2]汪凱,施立群,張明月.搬運機器人的無線遙控裝置設計與實現[J].自動化技術與應用,2016(6):61-63.
[3]王耀華.吳國慶.功能性運動鞋設計研究進展[J].中國皮革,2018(11):49-53.
[4]BOEK PAVOL,NIKITIN YURY.The development of an optimally-tuned PID control for the actuator of a transport robot[J].Actuators,2021(10):195.
[5]張高美,羅冠益,董兵兵.超市搬運機器人發展前景研究[J].中國設備工程,2021(4):25-26.
(編輯 李春燕)
