基于虛擬旋轉的速率積分型半球諧振陀螺鎖區(qū)克服方法
2023-05-19 08:23:22姚志強劉珊珊
導航與控制 2023年2期
白 帆,姚志強,劉珊珊,劉 聰
(中國航空工業(yè)集團公司西安飛行自動控制研究所,西安 710076)
0 引言
半球諧振陀螺(Hemispherical Resonant Gyroscope,HRG)興起于20世紀60年代,是一種新型的哥氏振動陀螺,具有精度高、結構簡單、可靠性高、體積小、質量小以及功耗低等優(yōu)點,在國防、航空、航天、航海等領域具有重要應用價值,因此得到了廣泛關注[1-3]。
半球諧振陀螺主要有兩種控制模式,即速率模式和速率積分模式[4-5]。速率模式是指,當陀螺敏感到外界輸入角速度時,諧振子的振型會相對殼體發(fā)生進動,通過控制電極實時施加反饋力,使四波腹振型不發(fā)生進動,即振型與殼體方向始終保持一致,再根據(jù)所施加的反饋力的大小得到要測量的角速度信息[6]。速率積分模式是指,諧振子的振型可以自由進動,振型進動的角度與載體轉動的角度成比例關系,通過測量振型進動的角度就可以直接得到載體轉動角度。速率積分模式下,振型可以自由進動,具有較高的帶寬,能夠滿足大動態(tài)高機動性條件下的測角需求[7-8]。陀螺的閉鎖效應是指,外界輸入角速度小于陀螺的閉鎖閾值時,陀螺無法準確敏感到外界輸入的角速度。在半球諧振陀螺的制造過程中,由于制造工藝水平的限制,會帶來許多的誤差。其中,阻尼不均勻和頻率裂解是造成陀螺閉鎖誤差的主要來源[9],這直接影響了陀螺的性能。
虛擬旋轉法是指對半球諧振陀螺的控制電極施加靜電驅動力,以驅動諧振子的振型虛擬旋轉。文獻[10]通過驅動振型虛擬旋轉實現(xiàn)了模態(tài)反轉,對零位進行校準,校準后零位下降,降低了測量誤差。文獻[11]對振型施加了6(°) /s~10000(°) /s 的虛擬旋轉,結果表明,隨著轉速的增加,非理想半球諧振陀螺的進動因子越趨近理想值,即在測量高轉速時表現(xiàn)更為出色。但是,這些文獻只是對虛擬旋轉法進行了一定程度的應用,并沒有介紹工程中如何使用虛擬旋轉法使速率積分模式陀螺克服鎖區(qū)并工作在正常模態(tài)。本文首先理論推導了虛擬轉速應用的必要性,在此基礎上應用控制變量法研究了隨外界輸入角速度變化陀螺的閉鎖狀況,在速率積分型半球諧振陀螺控制方案的基礎上,采用虛擬旋轉方法,研究了虛擬轉速對陀螺克服鎖區(qū)的影響,對此進行了理論推導和仿真驗證,并創(chuàng)新性地結合工程實際分析了可行性和操作方法。
本文結構如下: 首先,根據(jù)半球諧振陀螺諧振子動力學方程建立誤差模型,給出了半球諧振陀螺的控制方法。其次,針對半球諧振陀螺的鎖區(qū)問題,提出了一種驅動振型虛擬旋轉的方法。最后,搭建Matlab Simulink 模型,驗證了本文提出方法的有效性。
1 半球諧振陀螺理論基礎
半球諧振陀螺在敏感到外界輸入角速度時,它的振型會相對于其殼體反向進動,且其進動角度與外界輸入角度成比例關系,通過測量方位進動角的變化,可以準確得到載體轉動的角度,從而達到測角功能。理想情況下,方位進動角與外界輸入角速度的關系為
式(1)中,θ為陀螺的進動方位角;k為進動因子,只由器件本身特性決定;Ω為外界輸入角速度。
理想情況下,可以用一個質量塊在二維空間中的簡諧振動來等價描述半球諧振陀螺的力學等效模型[12],具體如圖1所示。

圖1 HRG 等效模型Fig.1 Equivalent model of HRG
Lynch 博士針對半球諧振陀螺應用了平均法的思想[13],將半球諧振陀螺的運動軌跡簡化為圖2所示的橢圓軌跡。圖2中,橢圓長半軸a為主波波腹軸,短半軸q為正交波腹軸,θ為主波波腹軸的方位角,ω為諧振子的諧振頻率,ψ0為質點運動的初始相位。
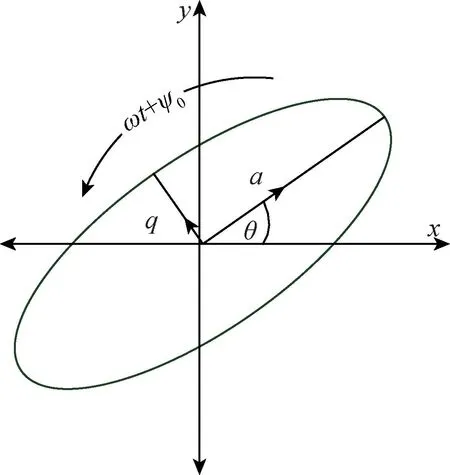
圖2 橢圓軌跡圖Fig.2 Diagram of elliptic trajectory
實際中,考慮到諧振子阻尼不均勻和頻率裂解的存在,半球諧振陀螺的數(shù)學模型為[12]
根據(jù)Lynch 平均法,可得到
式(3)中,E為諧振能量,Q為波節(jié)點的振幅,θ為主波波腹軸的方位角,δφ為鎖相誤差,fas、fqc、fqs和fac分別為用于控制振幅、消除正交誤差、控制振動方向以及控制振動頻率的控制力。
速率積分模式下的半球諧振陀螺信號處理與控制系統(tǒng)由四個控制回路組成,分別為能量控制回路、正交控制回路、角度解算回路、鎖相回路[14-15]。能量控制回路使諧振能量始終保持恒定;正交控制回路使陀螺敏感誤差趨近于零;角度解算回路使陀螺能夠自由進動,并實時輸出進動角;鎖相回路通過跟蹤諧振子的固有頻率,實現(xiàn)頻率鎖定的功能。半球諧振陀螺信號處理與控制系統(tǒng)框圖如圖3所示。

圖3 HRG 控制系統(tǒng)框圖Fig.3 Block diagram of HRG control system
2 基于虛擬旋轉的控制方法
由于諧振子阻尼不均勻的存在,當外界小角速度輸入時,阻尼不均勻產生的陀螺漂移會大于外界輸入角速度,此時陀螺將無法正確跟蹤外界輸入角速度[16-17]。本文采用一種驅動駐波虛擬旋轉的方法,使半球諧振陀螺在外界小角速度輸入時也能精確跟蹤外界輸入角速度。進動角滿足
在正交控制回路中,施加在離散電極上的靜電力會消除頻率裂解,使Δω無限趨于零,此時忽略頻率裂解,研究阻尼不均勻對于進動角的影響。于是,式(4)可簡化為
式(5)中,fqs為控制電極施加給半球諧振陀螺使駐波自進動的靜電力,Ωvirt為施加fqs后引起的駐波虛擬角速度。
通過增加外界輸入角速度,可以改善阻尼不均勻對陀螺漂移的影響[18]。此外,通過控制電極對諧振子施加一個遠高于速率閾值的虛擬旋轉Ωvirt,虛擬旋轉Ωvirt是通過施加在控制電極上的靜電力Fvirt產生的,外界輸入角速度引起的真實進動角θtrue可以通過測量進動角θ減去虛擬旋轉的角度得到
此時,施加在x和y方向上的驅動力為
引入了虛擬旋轉的半球諧振陀螺控制系統(tǒng)原理框圖如圖4所示。
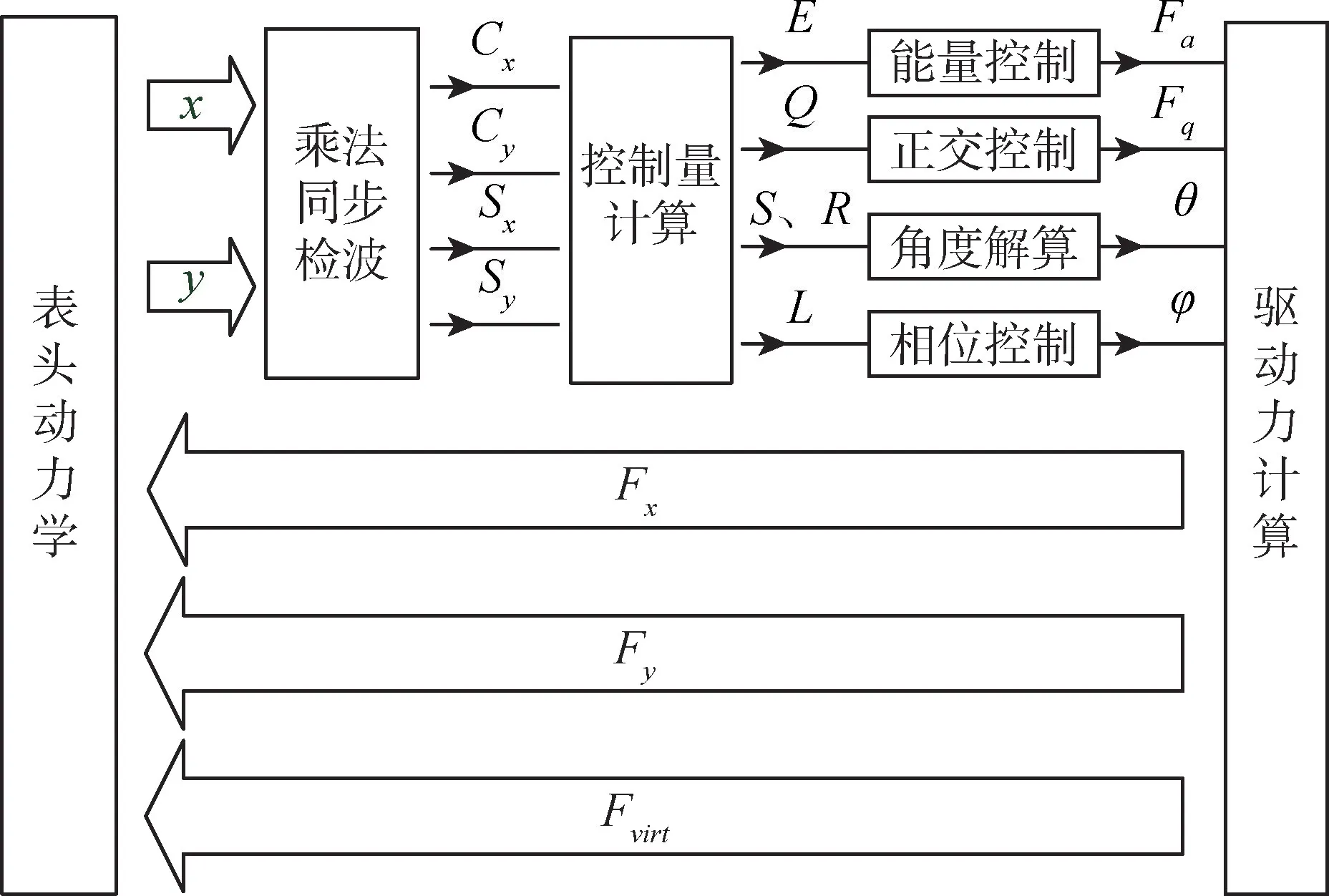
圖4 加入虛擬旋轉的HRG 控制系統(tǒng)框圖Fig.4 Block diagram of HRG control system with virtual rotation
3 仿真驗證
3.1 速率積分型半球諧振陀螺控制方案仿真
本文建立的Matlab Simulink 仿真模型如圖5所示,由HRG 表頭動力學、乘法同步檢波、控制量計算、控制回路和驅動力計算模塊組成。
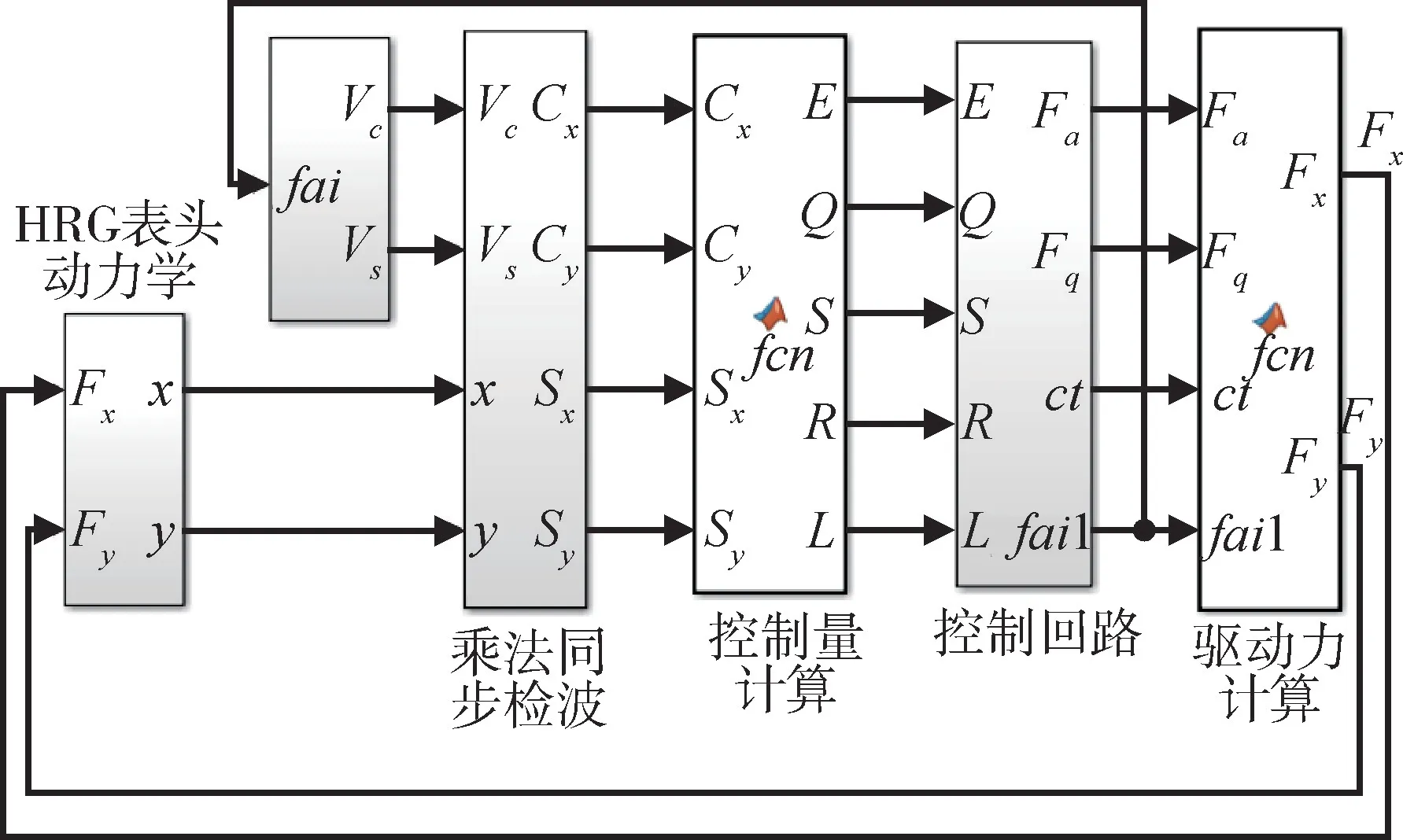
圖5 HRG 控制系統(tǒng)Simulink 框圖Fig.5 Simulink block diagram of HRG control system
本文仿真采用的參數(shù)如表1所示。
表1 仿真參數(shù)Table 1 Parameters of simulation
當外界輸入角速度Ω=180(°) /s 時,半球諧振陀螺的仿真輸出曲線如圖6所示,此時的方位進動角θ隨時間變化關系如圖7所示。仿真結果表明,x軸、y軸信號的最大振幅始終為2V,不隨時間衰減;x軸、y軸信號的頻率始終保持諧振子諧振頻率4430Hz;x軸、y軸信號的相位始終相差90°。因此,該控制方案能夠使半球諧振陀螺的振幅穩(wěn)定、相位穩(wěn)定,方位進動角能夠實時跟蹤外界輸入角速度。
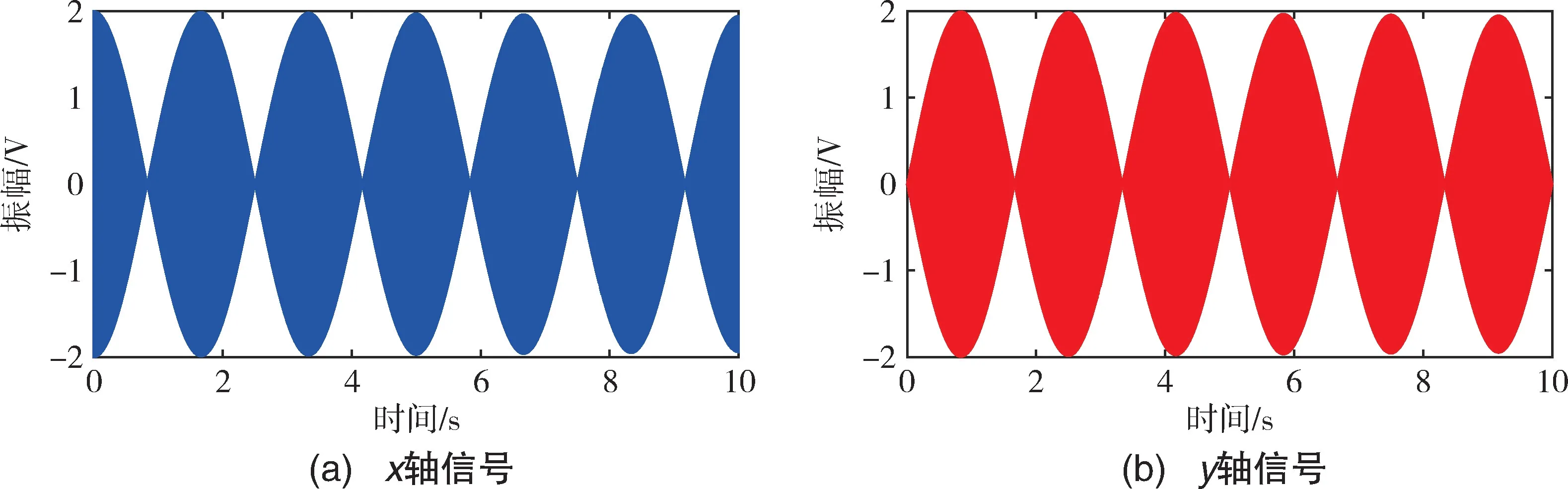
圖6 HRG 仿真響應曲線Fig.6 Response simulation curve of HRG
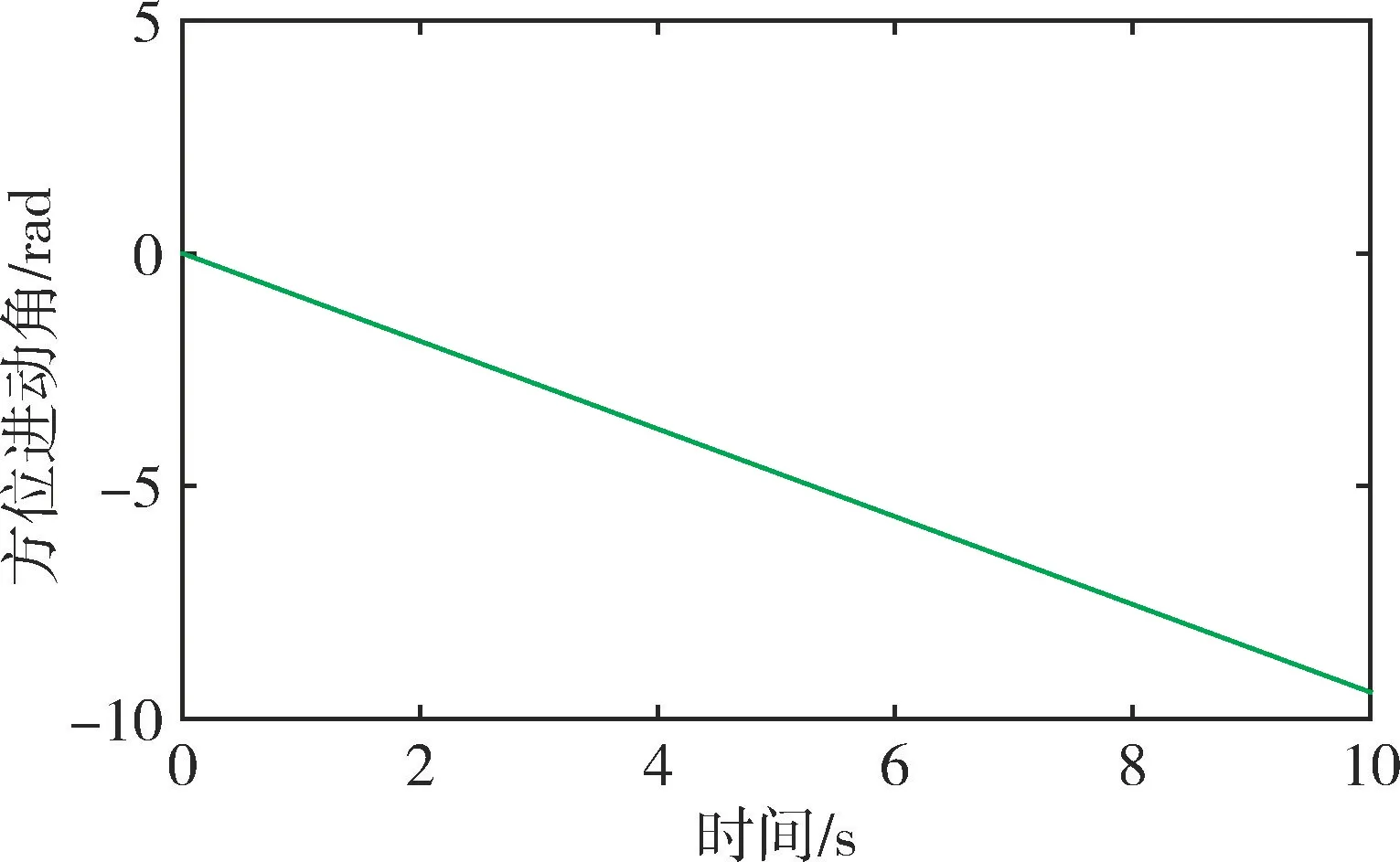
圖7 方位進動角隨時間變化關系Fig.7 Relationship between pattern angle and time
3.2 虛擬旋轉法仿真
在速率積分型半球諧振陀螺控制方案的基礎上增加虛擬旋轉模塊,Simulink 仿真模型如圖8所示。
當外界輸入角速度小于陀螺阻尼不均勻所導致的零位漂移時,如圖9所示,令外界輸入角速度Ω分別為0(°) /s、10(°) /s、20(°) /s 和40(°) /s,陀螺方位進動角均會閉鎖在某恒定值,反映了HRG的閉鎖效應。此時,為了使陀螺能夠克服閉鎖效應,給陀螺施加不同的虛擬轉速,如圖10所示。本文設計了一組對比仿真,對陀螺持續(xù)施加Ω=10(°) /s 的外界輸入角速度,研究虛擬轉速不同取值對陀螺克服鎖區(qū)的效果。
由圖10可知,當施加較小的虛擬轉速Ωvirt=0.5πrad/s 時,進動方位角最終會收斂到某恒定值,此時仍然不能克服鎖區(qū)的影響;當施加的虛擬轉速為Ωvirt=πrad/s 時,進動方位角雖然不會收斂,但是其波動較大,嚴重影響了測角精度;當施加的虛擬轉速為Ωvirt=5πrad/s 和Ωvirt=20πrad/s時,方位進動角隨時間變化已經是一條平穩(wěn)的直線,說明此時已經能夠實時跟蹤外界輸入角速度,克服鎖區(qū)的影響,實現(xiàn)測角功能。本文為提高計算效率,取阻尼不均勻=2rad/s,目前經過調平的諧振子阻尼不均勻能夠抑制到0.1rad/s 以內,由可知,角速度閾值與阻尼不均勻成線性關系,即對于任一鎖區(qū)內的外界真實輸入角速度,理論上總會存在一個虛擬轉速能夠克服鎖區(qū)。然而,當虛擬轉速較小時,雖能夠克服鎖區(qū),但此時方位進動角的波動會很大,測角精度差,如圖10(b) 所示;當虛擬轉速過大時,增加了控制的難度,還可能會引發(fā)其他誤差。因此,在實際工程應用中,在理論計算的基礎上,還應該進行進一步的測試,選擇一個合適的虛擬轉速。
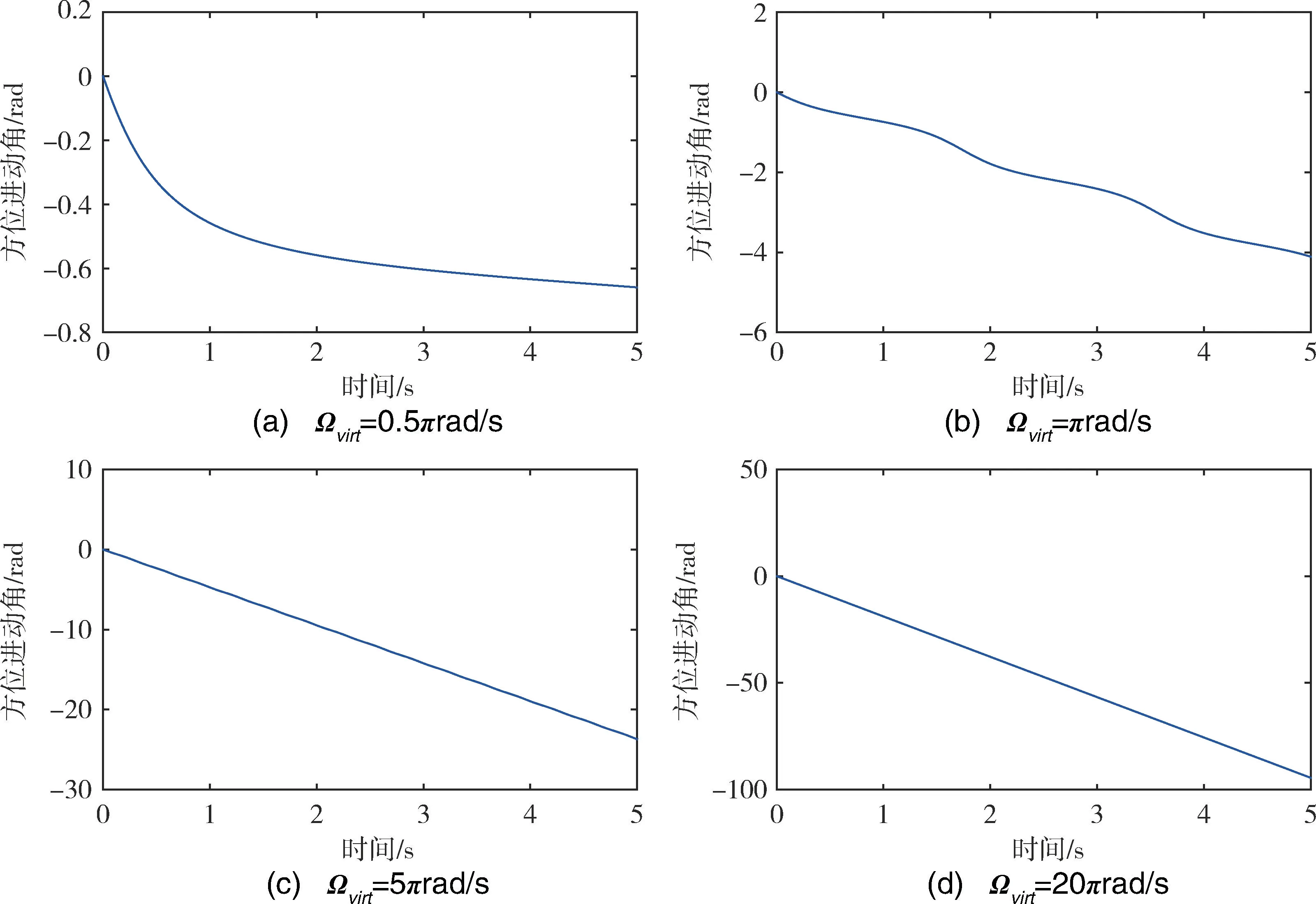
圖10 虛擬轉速不同取值對陀螺克服鎖區(qū)的效果Fig.10 Results of overcoming lock-in effect with different virtual speed
4 結論
本文采用Matlab Simulink 模塊建立了一種速率積分型半球諧振陀螺的控制方法,使陀螺在大動態(tài)環(huán)境下能夠正常跟蹤外界角速度并輸出測角信息。針對外界小角速度輸入時產生的閉鎖效應,采用控制電極驅動諧振子振型虛擬旋轉的方法,能夠實現(xiàn)克服陀螺鎖區(qū)的目標。結合目前現(xiàn)狀,后續(xù)有望從以下兩方面展開研究: 設計實驗方案,驗證本方案對克服鎖區(qū)的作用,并回歸理論和仿真模型,進一步驗證模型的正確性;理論與仿真研究虛擬轉速對陀螺漂移誤差、零偏穩(wěn)定性的影響,并設計實驗進行相關驗證。