AUV 智能集群協同任務研究進展
2023-05-19 08:49:36趙振軼馮豪博
水下無人系統學報 2023年2期
胡 橋 ,趙振軼 ,馮豪博 ,姜 川
(1.西安交通大學 機械工程學院,陜西 西安,710049;2.西安交通大學 機械制造系統工程國家重點實驗室,陜西 西安,710049;3.西安交通大學 陜西省智能機器人重點實驗室,陜西 西安,710049)
0 引言
自然界中存在著大量的群體自組織行為,其中最為典型的包括蟻群、鳥群和魚群等。他們中一些功能簡單的個體在通過局部關聯組成一個整體之后,涌現出令人印象深刻的整體智能行為,其可以完成的任務復雜程度遠超個體智能的簡單加和。因此,自然界的群體智能行為吸引了人們的關注,而以智能機器人為代表組成的多智能體系統,為人們研究自然界的群體智能行為涌現提供了研究平臺。
隨著機器人制造和人工智能技術的飛速發展,機器人可以完成越來越多的陸地工程任務,例如路徑規劃、自主巡航和群體協作等。相比之下,水下航行器則面臨著更加極端復雜的環境,如復雜的水流運動與海底結構、高壓環境、低能見度和環境對儀器設備的干擾等,發展水下航行器的難度遠高于陸地機器人,一方面,航行器無法憑借簡單的探測工具獲取周圍水環境信息,另一方面,對于航行器的運動控制也會受到水流的巨大干擾。這些都是海洋探索與開發過程中亟待解決的問題。
多智能體圍捕任務作為體現多智能體系統智能化程度的非常具有代表性的任務,具有重要的研究價值。圍捕任務可以為實現捕獲、搜索、攔截、隊形轉換和協作搬運等提供支撐,可以廣泛應用于反恐、安保、軍事等領域,具有重要意義。圍捕任務中所涉及的研究內容包括集群數學模型、個體運動方式、通信協議、智能決策和任務評價指標等,由于其涉及方面廣、復雜程度高、對多智能體協作要求嚴格等特點,使其成為多智能體協作的重點研究方向。
路徑規劃作為水下智能集群進行作業任務中的關鍵一環,在提升航行性能、保障航行安全、降低航行能耗和提升作業效率等方面起到重要作用[1-2]。與單智能體系統相比,水下智能集群航路的規劃更為復雜,不僅需要考慮海洋環境因素,還需要對航行器間航行路徑進行統籌協調,對路徑規劃系統的實時性、系統性和魯棒性提出了更高要求[3],使其得到越來越多學者的關注。文中以此為主題,綜述國內外的多智能體集群協同任務的研究現狀,并重點介紹筆者團隊在此領域的研究成果。
1 國內外智能集群多種協同任務及相關技術研究現狀
近年來,圍繞智能集群的各類任務應用及涌現的一些問題,國內外學者進行了廣泛研究并取得了許多具有重要意義的成果。文中梳理了其中一些關于智能集群任務類型及其涉及關鍵技術的相關工作,并從集群圍捕、路徑規劃和編隊控制三方面來進行闡述。
1.1 集群圍捕任務
以智能機器人[4-7]為代表的智能個體集群組成的多智能體系統是人們研究自然界智能群體行為的重要研究平臺。其中,多智能體協同圍捕任務則是反映多智能體系統智能化程度的代表性任務之一。協作圍捕任務技術可以為其他任務提供支持,如搜索[8]、攔截、隊形轉換[9]和合作運輸[10],可廣泛應用于反恐、安全和軍事等領域。協同圍捕任務涉及的關鍵技術包括群體數學建模、個體運動模式、個體間信息交互方式、智能決策過程和任務評價指標等。所涉及的智能機器人集群技術是多樣而復雜的。因此,研究人員經常以協同圍捕任務[11]的完成情況來評價智能集群系統的性能。
目前已經有許多研究者對水下協同圍捕問題中的一些關鍵技術進行了詳細的研究并取得了卓越的成果。自主水下航行器(autonomous undersea vehicle,AUV)作為智能水下航行器的代表平臺之一,因其具有探測、通信、智能決策和控制等功能而在水下作業中得到廣泛應用。在多AUV 協同圍捕問題中,多AUV 系統工作在未知的水下環境中,對水下AUV 集群的探測、通信和控制提出了新的挑戰。由于水下環境的復雜性,AUV 的傳感范圍非常有限,無法獲得準確的全局信息,但是合作圍捕必須考慮避障行為。Huang 等[12]對AUV的圍捕問題進行了建模,采用構造信息完整地圖的方法完成了AUV 的圍捕,對水下圍捕策略進行了仿真驗證。然而,該策略需要太多的先驗信息,在實際中很難獲得。Cao[13]和Zhu[14]等利用仿生神經網絡(bionic neural network,BNN)模型研究了多AUV 圍捕問題,提出了一種基于距離的協商方法來分配圍捕任務。分別在二維和三維環境下進行了仿真研究。該算法能夠較快地捕獲目標,但需要全局地圖信息進行建模,同樣實際應用有限。Ni 等[15]提出了一種基于雙向協商策略的動態聯盟方法和一種基于改進遺傳算法的運動方向分配方法,圍捕AUV 在行動前會進行協商,可以有效提高圍捕AUV 的航行效率。Cao 等[16]采用協商的方法為每個AUV 分配合適的理想圍捕點。圍捕AUV 可以按預期路徑點包圍運動目標,但在該研究中,圍捕團隊是通過提前協商組成的,由于水下通信的困難,各AUV 之間交互的信息量非常有限,無法進行大量的交流,因此,這種方法很難在實際中應用。Cai 等[17]采用生成對抗網絡(generative adversarial networks,GAN)迭代訓練生成適合水下三維和干擾環境的控制律,實現對非合作目標的成功獵殺。Liang 等[18]提出了一種基于免疫機制的行為驅動協作控制方法,開發了具有自組織和容錯特性的混合非中心拓撲結構。但是,以上2 位學者的研究均是基于簡單環境,沒有障礙物等復雜情況,通過訓練特定環境中的控制關系得到的控制律作為生成模型的輸入,無法應用于其他更廣泛的情況。Chen 等[19]針對具有不同運動能力的AUV,結合了Glasius 啟發式神經網絡(Glasius bio-inspired neural network,GBNN)模型和置信函數,在動態水下環境中利用非均勻多捕獵AUV 智能追捕逃逸者,其構建的水下三維環境及多AUV 運動過程如圖1 所示。但是,水下環境的復雜性與信息獲取的困難導致了構建通用的神經網絡模型十分困難,因此這類方法難以在復雜多變的水下實際環境中應用。

圖1 動態水下環境中非均勻多AUV 集群圍捕示意圖Fig.1 Diagram of inhomogeneous multiple AUVs cooperative hunting in dynamic underwater environment
綜上所述,一方面由于傳統電磁波在水下環境中的快速衰減,水下航行器之間通信及定位相對困難;另一方面由于定位與狀態反饋很難精確的獲得,這些因素對水下多智能體集群系統的穩定性造成了很大的挑戰,對實現集群任務造成了很大干擾。因此,水下智能集群系統從個體和系統模型到集群算法方面都具有其自身特殊性。目前所實現的功能仍然較為初級,系統的穩定性不夠,且智能化、自主化程度不高,這方面的研究仍處于探索階段,大量理論與工程問題亟待解決。
1.2 路徑規劃任務
路徑規劃問題可以描述為在一定區域的海域環境中,在對海域空間建模的基礎上,通過路徑搜索算法尋找一條或多條由起始點至目標點的評價單目標最優或多目標最優(例如航行時間最短[20]、路徑長度最短[21]、航行能耗最小[22]、安全性最好等)的無碰撞路徑。相比于地面移動機器人和空中飛行器,水下智能集群的路徑規劃問題更為復雜,面臨來自海底地形、海洋生物及海洋渦流等多方面因素的干擾[23-24]。
路徑規劃可分為離線路徑規劃(靜態路徑規劃)和在線路徑規劃(動態路徑規劃)兩類。離線路徑規劃指根據全局先驗信息提前搜尋一條或多條由起始點至目標點的可行路徑,側重于優化航行路徑的某些指標以達到縮減航行時間、節約航行能耗等目的,其規劃結果精度取決于先驗環境信息的準確度。離線路徑規劃對規劃方法的實時性要求不高,但由于不能對變化的環境因素進行航路修正,因此難以在復雜多變的海洋環境中保證航線路徑的時效性和安全性。動態路徑規劃指基于全局先驗信息和傳感器實時獲取的環境信息實時規劃并更新路徑,側重于提高水下航行器對動態環境障礙等難以提前預知的干擾因素的應對能力、在航行軌跡偏離預定路徑情形時的主動修正能力,因而對路徑規劃算法的實時性要求很高而對最優性要求較低。目前,主流的路徑規劃算法可分為傳統方法、基于柵格地圖的圖搜索方法、基于隨機采樣的圖優化方法以及智能仿生方法四大類,如圖2 所示。
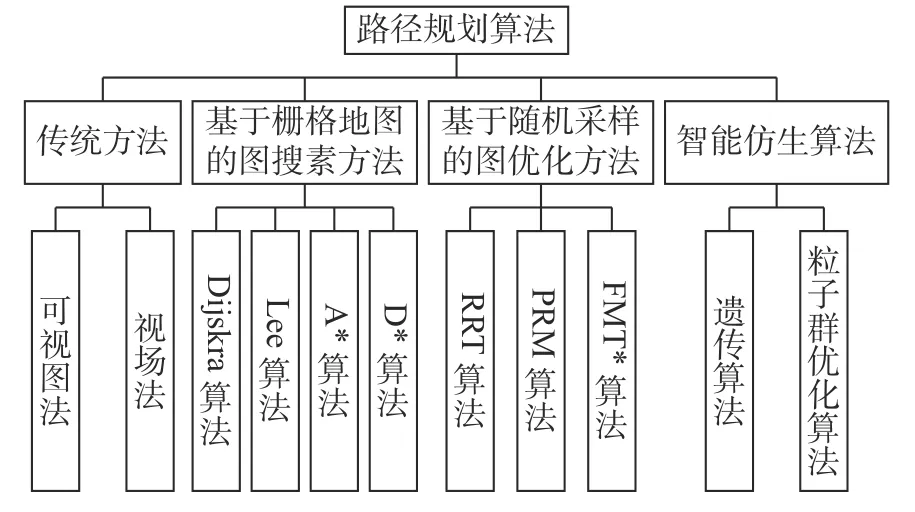
圖2 路徑規劃算法Fig.2 Path planning algorithms
可視圖法和勢場法是應用最為廣泛的2 種傳統路徑規劃方法。可視圖法將障礙物用外接多邊形表示,將起始點、目標點與障礙多邊形頂點三者之間進行兩兩連線,并摒棄與障礙多邊形相交的連線,從而得到表示可行路線的有向圖。然后通過Dijskra 算法[25]、Lee 算法[26]等尋優算法搜索出從起始點至目標點的多段可行路線依次首尾相接的最短路徑。但此方法的路徑規劃效率隨著障礙數變多和形狀變復雜而顯著降低,在解決實際路徑規劃問題時其實時性難以滿足需求。勢場法是一種虛擬力法,其勢場一般由目標點產生的引力場和障礙物產生的斥力場疊加而成,通過被控對象在勢場中所受虛擬力的方向和大小確定局部路徑,能夠規劃出非常平滑的路徑[27-28]。雖然該方法具有求解效率高、路徑質量好的優點,但存在局部極值較多、參數調節困難、全局最優性差等不足。
基于柵格地圖的圖搜索方法通過將地圖離散化為由可行柵格和障礙柵格組成的柵格地圖,并應用A*算法、LPA *算法、D*算法等搜索算法規劃從起始點至目標點由一系列相接柵格組成的最優路徑。A*算法自1968 年首次被提出以來一直是應用最為廣泛的全局路徑規劃算法[29],屬于啟發式全局算法,具有搜索效率高、建模簡單等優點,但存在易于陷入局部最優、搜索性能對參數敏感等缺陷。LPA*算法是一種改進A*算法,能夠處理動態環境中的起始點和目標點均固定情形下的最短路徑規劃問題[30]。D* Lite 算法是在A*算法的基礎上發展而來的增量式路徑搜索算法,Bing 等[31]采用D* Lite 算法解決水下航行器在動態變化三維水下環境的路徑規劃問題,有效彌補了A*算法及LPA*算法在變化環境中實時搜索效率低的問題。蔣林等[32]針對A*類算法拐點多、遞歸計算復雜的問題,提出了一種基于射線模型的全局路徑規劃算法,所規劃路徑具有更好的平滑性、靈活性和穩定性。針對A*算法僅能求解不包含動力學、運動學等約束下路徑規劃問題的缺陷,Dolgov 等[33]提出了Hybrid A*算法,通過滿足約束要求的曲線段生成節點或求解節點與相鄰節點的連接方式,在此基礎上應用A*方法探索狀態空間。
基于隨機采樣的圖優化方法主要分為快速擴展隨機樹法(rapidly-exploring random tree,RRT)和概率路圖法(probabilistic road map,PRM)兩大類[34-35],而RRT*算法則是從RRT 算法發展而來的最優路徑規劃方法[36],由于具有全局漸進最優的特點而逐漸取代RRT 和PRM 成為應用最為廣泛的基于隨機采樣的路徑規劃算法,如圖3 所示。由于RRT*求解效率與求解質量成負相關關系,因此提升RRT*算法的路徑規劃性能一直以來都是研究熱點。雙向搜索方式通過從起始點和目標點分別構建隨機搜索樹,可以有效減少迭代次數從而降低規劃時耗[37]。Chen[38]等將回旋曲線應用于構造樹枝平滑的隨機搜索樹,有效地提高了規劃路徑的可執行性,但存在尋優能力弱以及計算成本高等缺陷。Chandler 等[39]針對動態目標時路徑重規劃問題,通過對原有隨機搜索樹進行重布線修正減少重規劃開銷,提出了效率更高的在線RRT*和FMT*算法。

圖3 RRT*路徑規劃算法示意圖Fig.3 Path planning based on RRT*
常用于路徑規劃的智能仿生算法包括遺傳算法、粒子群優化算法兩類。遺傳算法是由Holland[40]于1975 年提出的基于自然界優勝略汰思想的一種隨機搜索優化算法,具有收斂速度快、建模簡單、普適性強等優點,被廣泛應用于解決水下航行器的全局路徑規劃問題。張美燕等[41]將水下航行器航行集群的協作探測路徑規劃問題轉化為多旅行商問題,以能耗及能耗均衡為約束條件并采用遺傳算法進行求解,有效提高了水下航行器集群的巡航速度及作業時長,但該方法并沒有對環境障礙進行考慮。Kapanoglu 等[42]將路徑模板匹配融入遺傳算法中實現了集群的合作全覆蓋路徑規劃,能有效減少區域覆蓋時耗,但該方法由于路徑模板局限性而難以適用于動態環境。粒子群優化算法是由Eberhart 等[43]提出的模擬鳥類種群捕食行為的一種啟發式算法,能在有限的計算時間內保證最優性。Guo 等[44]針對水下航行器在時變海流環境下的全局路徑規劃問題,通過預估海流速度矢量和建立AUV 運動學方程改進粒子群優化算法以提高水下航行器的自主路徑規劃能力。鄒佳運[45]針對水下滑翔機集群對區域的探測路徑規劃問題,提出了一種基于粒子群算法和序貫思想的覆蓋路徑規劃算法,實現了以較小的計算成本規劃較優區域搜索方案。王浩亮等[46]提出了基于量子行為的自適應粒子群優化方法,在此基礎上結合基于人工勢場法的局部路徑規劃方法提出了一種雙層協調路徑規劃結構,實現了水下滑翔機集群在復雜海洋環境中具備靈活避碰能力的時間最優路徑規劃,但該方法沒有考慮海洋生物等動態障礙,在環境多變場景中規劃效率仍難以滿足實際需求。
總體而言,目前水下智能集群路徑規劃技術圍繞著提升單智能體系統對復雜海洋環境的應變能力、降低路徑規劃的實時計算成本、滿足水下智能集群在不同工況下航路需求3 個方面,朝著高實時性、高動態避障性能、多指標優化方向發展。但水下智能集群的路徑規劃技術由于其復雜性仍未在應用層面取得重大進展,制約了其在無人集群協同作戰、海洋應急搜救等領域的廣泛應用以及相關海洋技術領域研究的發展。
1.3 編隊控制任務
編隊控制是目前水下無人集群技術的研究熱點之一,是提升水下無人集群現代化、智能化和信息化的重要途徑之一。水下智能集群通過一定的編隊控制方法進行運動協調,或組建穩定的編隊隊形,在海洋環境考察、海洋物資運輸、水下集群作戰等領域都具有單水下作業平臺所無法比擬的優越性,可以為實現高性能路徑規劃、高質量實時避障、高效率作業水平提供支持。但相對而言,由于集群規模的增大,水下智能集群的編隊隊形協調控制也變得更為復雜,在穩定性、實時性、系統性和魯棒性等方面對編隊控制算法提出了更高的要求。現階段,常用的編隊控制方法主要有領航者-跟隨者法、虛擬結構法和行為法3 種,此外還有為了提高編隊控制魯棒性所提出的人工勢場法和圖論預測法。其中,領航者-跟隨者法和虛擬結構法通常情況下還需搭配額外的軌跡跟蹤方法以完成對集群的航路控制。
領航者-跟隨者編隊控制方法是由Wang[47]于1991 年首次提出的一種主從式編隊控制方法,其核心思想是由領航者進行路徑規劃,跟隨者基于領航者位置和速度等信息根據約束條件計算位置誤差與速度誤差等信息以保持相應的運動狀態,從而形成較為穩定的編隊隊形系統。其將無人集群系統的運動控制問題分解為領航者的路徑規劃問題和跟隨者的跟蹤運動問題,有效減小了無人集群編隊控制的復雜程度和控制難度。但作為一種基于集中式控制的方法,其控制效果依托于領航者的航行情況、通信穩定性等因素,因此實際應用效果通常難以維持在預期水平。賴云暉等[48]基于領航者-跟隨者策略和圖論法,通過為領航者和跟隨者應用不同的控制策略,實現了穩定的固定編隊隊形控制,但該方法僅適用于較為簡單的環境且難以處理隊形切換問題。Yan 等[49]針對編隊控制中海洋流場干擾造成的定位精度降低問題,提出一種基于圖論和虛擬領航者的編隊控制方法,有效減少航行器間的通信量,增大編隊隊形的控制精度和穩定性。
虛擬結構編隊控制方法是由Lewis[50]于1997年提出的一種分布式編隊控制方法,其核心思想是將期望隊形考慮為剛性虛擬結構,根據虛擬結構為每臺水下航行器分配期望位置,水下航行器以期望位置為參考計算期望速度等控制信息,從而確定水下智能集群的運動路徑。這種方式將水下智能集群的編隊隊形控制問題轉化為水下航行器對參考點的追蹤問題,具備較高的編隊隊形和運動軌跡控制精度,但由于缺乏隊形變換靈活性因此難以適應復雜的海洋環境。Cervantes 等[51]針對三維環境下水下航行器的軌跡控制問題,結合微分器設計出一種基于混合結構的虛擬結構法控制器,以位置和航向角4 個參數作為控制量,以較低誤差實現了水下航行器對虛擬參考點的跟蹤軌跡控制。潘無為[52]采用虛擬結構法,以期望隊形中心為虛擬結構中心,形成虛構結構隊形以及虛擬結構質點,虛擬結構中心采用人工勢場法實現避障,水下航行器跟蹤虛擬結構質點實現隊形控制,并通過仿真實驗驗證了該算法的可行性。
基于行為的編隊控制方法根據化繁為簡的思想將水下航行器集群的編隊行為控制分解為一系列的子行為,通過控制水下航行器對子行為的有序執行實現對水下航行器集群整體行為的控制。在實際工程應用中,水下智能集群間共享事先預定義的基本行為集合,在作業過程中通過對基本行為的組合實現復雜行為,基于行為控制原則動態協調分配各水下航行器的行為和航跡實現水下航行器集群的協同控制,因此具備較高的靈活性、適應性和魯棒性。Hacene 等[53]通過將集群編隊行為分解成目標追蹤、障礙避碰和互相避讓等若干基本行為,基于領航者-跟隨者策略實現集群系統在未知動態環境中的目標跟蹤、實時避障和隊形控制,但難以應用于障礙形狀復雜的環境中。Kang 等[54]針對未知海洋環境中的水下智能集群編隊控制問題,融合模糊邏輯控制提出了一種基于行為的編隊控制方法,并通過仿真驗證了該方法的可行性和魯棒性。
綜上所述,現有編隊控制研究基本都以實現軌跡跟蹤、隊形控制等多種需求為切入點,在提升隊形控制穩定性、保證協同避障安全性、減少通信負擔等方面已經取得了大量成果,但現有方法仍難以同時對外界干擾、通信延遲、信道受限以及拓撲結構切換等因素進行考慮。此外,現有研究均以同構水下航行器集群系統作為被控對象,即所有水下航行器均具有相近的動力學特性、運動學特性和軟硬件系統,但相比之下,功能不同的異構水下航行器組成的水下智能集群系統具有更廣泛的應用前景。因此,在編隊控制方面要實現更為普適實用的水下智能系統仍然面臨許多挑戰。
2 AUV 集群多任務關鍵技術
筆者團隊在水下智能集群多任務領域也進行了大量研究。為對水下AUV 平臺為代表的水下航行器集群進行研究,設計的全向移動AUV 實驗平臺如圖4 所示。其中,水平和垂直螺旋槳推進器為AUV 提供了全向移動能力;控制和傳感艙包括電場通信和視覺檢測模塊,使得AUV可以在其周圍環境的一定范圍內獲取信息。
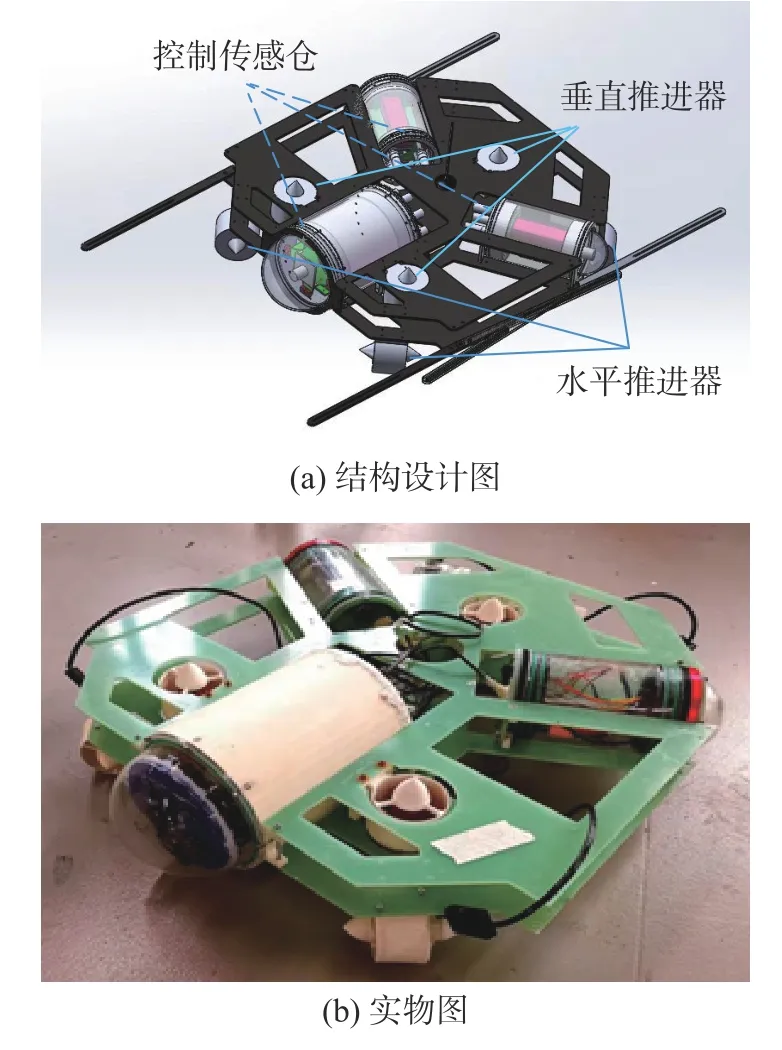
圖4 全向移動AUV 實驗平臺Fig.4 An omnidirectional mobile AUV experimental platform
2.1 集群協同圍捕技術
在水下環境中,由于多智能體之間的通信以及各自的定位都具有一定的困難,對水下多智能體集群系統的穩定性提出了挑戰。現有研究在集群系統的穩定性、智能化和自主化方面仍處于探索與提高階段。筆者團隊主要針對多AUV 在有障礙的水下弱信息環境中的協同圍捕任務展開研究。與深海環境相比,淺水環境有更多的障礙和其他干擾,由于在實際淺水區的大多數情況下,目標和圍捕AUV 之間的二維平面距離變化遠大于航行器的深度變化,因此考慮二維平面中的運動。協作圍捕任務描述如下:在無界的二維空間中,存在一個由圍捕AUV 和具有與圍捕AUV 相同智力的對抗目標組成的對抗集群。每個圍捕AUV 從初始位置開始,經過數個時間步長,當所有圍捕AUV 到達智能對抗目標周圍并形成包圍隊形時,圍捕任務完成。
基于人工勢場(artificial potential field,APF)的方法是AUV 局部任務路徑規劃問題的一種常用方法,該方法對圍捕AUV 的通信和信息檢測能力要求較低,并且具有計算復雜度低、實時性高的優點,已在理論研究和實踐中被廣泛應用。然而,傳統基于APF 的方法在應用于多AUV 協同圍捕任務時,缺乏合作友好鄰居之間的區分,并且容易陷入局部最優,導致路徑振蕩,甚至無法到達預期區域。因此提出了一種基于改進的人工勢場(HAPIAPF)方法的混合自適應偏好方法,以解決在有障礙的水下弱信息環境中多AUV 協同圍捕問題。該方法考慮了水下協同圍捕任務的實際約束,建立了包括水下靜態和動態障礙物、AUV 傳感交互距離限制、AUV 速度變化、目標對抗策略和其他影響因素在內的任務模型。在傳統APF 方法中,目標對圍捕AUV 的吸引力隨著距離的減小線性降低并隨著對目標的接近最終趨于零,這可能導致圍捕AUV 最終只受到友鄰個體之間排斥力的影響,不利于最終形成穩定的編隊。為了解決這一問題,并在最后階段使成群的圍捕AUV 快速穩定地包圍目標,提出了一種圍捕偏好策略。定義目標引力函數為
式中:RT為圍捕收斂距離參數;ρ(Xi,XT)為目標和第i個AUV 之間的歐式距離。在傳統APF 方法中,當個體受到障礙物周圍吸引力和排斥力的影響時,在AUV 移動的下一時刻,合力可能會發生或正或負的變化。因此,AUV 計劃的路徑可能出現反復震蕩,導致能源浪費和時間消耗。為了解決這一問題,使多AUV 群快速穩定地通過障礙區域,提出了一種具有改進虛擬力的避障偏好策略。個體AUV 受到的友鄰作用函數為
式中:n為圍捕AUV 的數量;ρ(Xi,Xj)為第i個AUV 和感知范圍內的第j個友鄰個體之間的歐氏距離。假設共有m個障礙物或等效障礙物在第i個AUV 的感知距離內,障礙物的作用力函數為
最后,通過設計自適應權重控制單元,基于AUV 集群的狀態來選擇當前的最佳策略。通過仿真研究驗證了所提出方法的有效性。部分仿真過程及評價指標如圖5 和圖6 所示。
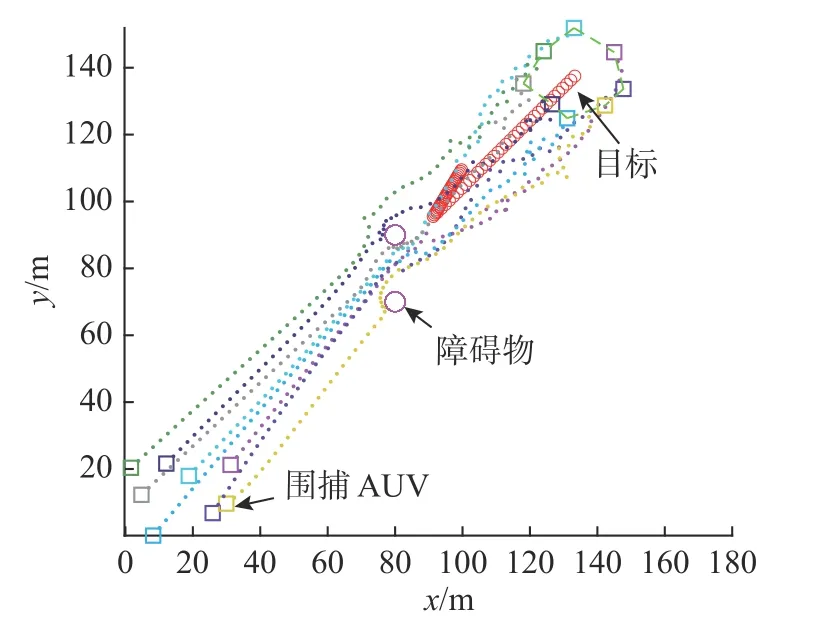
圖5 靜態環境中集群圍捕過程軌跡圖Fig.5 Cooperative hunting track in static obstacle environment
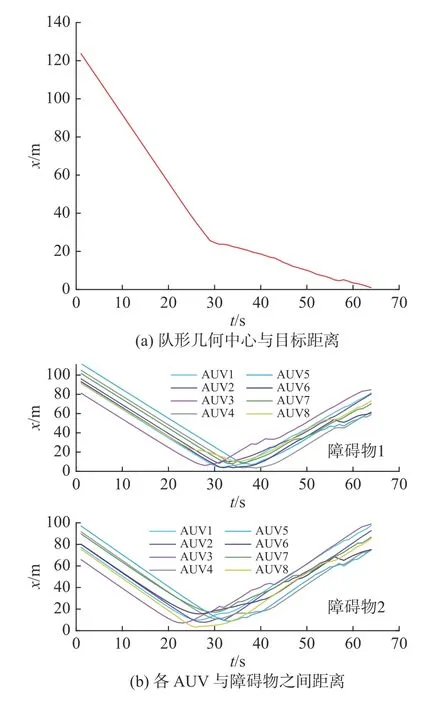
圖6 評價指標Fig.6 Evaluation indexes
如圖5 所示,在從位于原點附近的初始位置出發后圍捕AUV 集群以平滑的回避路徑穿過障礙物影響區域,并始終保持在安全距離以上,順利通過受障礙物影響的區域,最終在目標周圍形成了穩定且規則的環狀隊形,任務過程收斂。
以上工作經過與現有方法的對比分析[55],表明了所提出方法具有快速響應實時性強、避障路徑平滑、最終隊形穩定、動態環境適應性強的優點。未來將根據任務需求,進一步優化改進方法。
2.2 水下多路徑規劃技術
水下多路徑規劃是指為水下智能集群規劃多條從起始位置到目標位置的互不重合的可行路徑,是水下智能集群實現多編隊協同航行、巡航及圍捕的關鍵技術之一。相比于水下單路徑規劃,國內外學者對于水下多路徑規劃技術的研究相對較少。在這方面,筆者團隊開展了基于遺傳算法的最短航行時耗多路徑規劃相關研究[56-57]。
對于靜態環境中的水下多路徑規劃,基于遺傳算法引入精英族系策略,以平均路徑長度最短且相似度低的解集為尋優目標進行迭代求解。考慮到相互重合的路徑會導致水下智能集群在航行過程中存在相互避讓問題并提高航行所需時耗,采用了基因相似度來評價解集中個體所代表路徑的重合程度,從而引導解集個體朝著各局部極值迭代。同時為了避免早熟收斂現象,算法采用了基于三元錦標賽選擇的復制算子、基于三元錦標賽選擇的淘汰算子、基于局部最優的變異算子以及基于單點交叉法的交叉算子,進一步平衡了算法的全局搜索能力和局部尋優能力。該算法在水下智能集群獨立航行和編隊航行工況下均能規劃出最優路徑解集,如圖7 和圖8 所示。

圖7 獨立航行工況下多路徑規劃Fig.7 Multipath planning under independent navigation condition
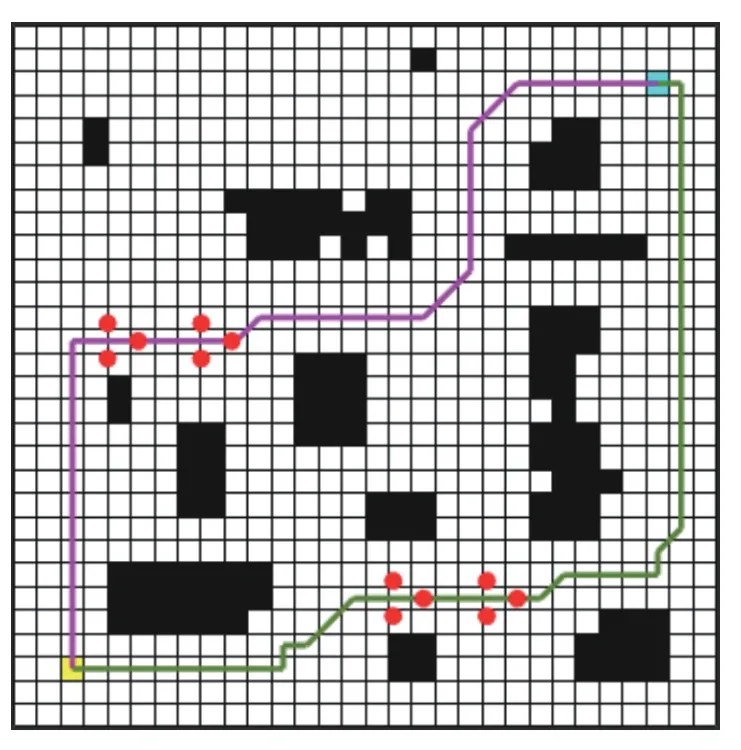
圖8 編隊航行工況下多路徑規劃Fig.8 Multipath planning under formation navigation condition
針對動態環境中的水下多路徑規劃,在實時性更好的A*算法的基礎上,引入排斥因子構建綜合代價函數,通過迭代思想和柵格優先度將用于規劃單一最優路徑的A*算法拓展為用于多路徑規劃的MA*算法。MA*算法的流程為:
1)將所有無障礙柵格的柵格優先度p值置為0,不可達柵格p值置為+∞。
2)清空open 表和close 表。
3)將水下無人集群的起始柵格放入open表中,g值置為0,f值置為0;將所有其余柵格的g值和f值置為+∞;將所有柵格的父節點置為0。
4)若open 表不為空,則取出open 表中f值最小的柵格n,否則判斷路徑規劃失敗。
5)對于n的所有鄰接柵格nnext,將不在open表中且不在close 表中的柵格放入open 表中,將n作為nnext的父節點,并由式(4)~(6)更新其g值、f值;對已在open 表中的柵格nnext則由式(4)~(7)更新其g值、f值和父節點,即
6)若n不為目標柵格,則將n從open 表中移除,并放入close 表中,跳轉至step4。
7)由g依次迭代獲取父節點直至父節點為起始柵格,反推得到一條可行路徑Ppath。
8)若可行路徑數量少于所需路徑數量,則按式(8)和(9)對所有可行柵格的p值進行更新;若部分可行路徑受變換環境影響轉為不可行路徑,則刪除該部分可行路徑并對所有可行柵格的p值進行更新。
9)轉至步驟2),進行下一輪迭代,即
式中:k為組成可行路徑Ppath的所有柵格;Kp和Ka為可行路徑間距調節參數;Kmap根據路徑規劃問題空間規模設為某一定值,一般取0.000 1~0.001,下標start 和goal 分別為起始柵格和目標柵格。
由于MA*算法進行每次迭代所需時間很少,通過不斷維護地圖中每個柵格的p值就可以實現在一次新的迭代中獲取當前環境中的最優多路徑方案,從而實現了變化環境中的實時路徑規劃。
3 總結與展望
針對水下航行器技術發展和集群多任務的需求,開展了一系列相關關鍵技術研究,取得了許多重要的技術突破。文中概述了其中一些關于智能集群任務類型及其涉及關鍵技術的工作,包括集群圍捕、路徑規劃和編隊控制等。但是,由于水下機器人面臨著復雜的環境和干擾,無法憑借簡單的探測工具獲取周圍環境信息,仍然存在實際應用中亟待解決的技術難題。因此,水下智能集群協同技術在水下多任務領域展現出巨大的發掘潛力,值得進一步的研究與探索。
從協同圍捕任務的角度分析,現有的研究注重理想環境中的任務策略研究。然而,水下環境復雜多變,多智能體之間的通信、各自的定位都具有一定的困難,這對水下多智能體集群系統的穩定性造成了很大的挑戰。因此,水下智能集群系統從個體、系統模型到集群算法都具有其自身特殊性。未來研究方向應注重提高系統的穩定性,即提出一般的任務策略,降低對特定環境和條件的依賴,使其在不同環境中具有更好的適應能力。同時進一步提高航行器的智能化、自主化程度,使得集群系統更加適應獨立復雜的任務需求,更好地完成任務。此外,還需要在研究過程中發現并提出完善準確的任務評價指標,這將有助于學習類算法的進步與實際應用,也能為水下多航行器協同圍捕任務提供新的研究思路。
從路徑規劃任務的角度分析,相比于地面移動機器人和空中飛行器,水下智能集群的路徑規劃問題更為復雜,面臨來自海底地形、海洋生物及海洋渦流等多方面因素的干擾。而相比于水下單路徑規劃,國內外學者對于水下多路徑規劃技術的研究相對較少。總體而言,目前水下智能集群路徑規劃技術圍繞著提升單智能體系統對復雜海洋環境的應變能力、降低路徑規劃的實時計算成本、滿足水下智能集群在不同工況下航路需求3 個方面,朝著高實時性、高動態避障性能和多指標優化方向發展。但水下智能集群的路徑規劃技術由于其復雜性仍未在應用層面取得重大進展,其在無人集群協同以及相關海洋技術領域的研究仍然具有廣闊的發展空間。因此,未來的研究應注重動態環境的多路徑規劃技術,在提升規劃路線的普適性和最優性的同時,降低對于環境信息的依賴程度,以有利于水下多路徑規劃技術在海洋集群技術領域得到更加廣泛的實際應用。
從編隊控制的角度分析,水下航行器集群通過一定的編隊控制方法進行運動協調是實現高性能路徑規劃、高質量實時避障及高效率作業水平的先決技術之一。雖然在相關領域已取得了一定的研究成果,但仍難以滿足實際應用需求。此外,相關研究仍缺乏對動態障礙、信道干擾和通信延遲等因素的考慮,同時主流的單一編隊控制策略也難以實現靈活的編隊隊形切換、異構平臺協同、異構感知信息融合等功能,使得水下自主集群的優越性仍未得到充分發揮,制約了水下智能系統的廣泛應用。因此,未來的研究應注重發展弱通信條件下協同控制、編隊任務多元化控制和異構系統控制策略,以有利于編隊控制技術應用于不同的海洋環境及作業場景。
4 結束語
AUV 智能集群協同任務技術涉及機器人學、流體力學和智能科學等多個領域。現有研究更多的處在理論研究階段,問題相對復雜,研究難度大。同時由于迫切而廣泛的需求,該領域具有很高的研究價值和廣闊的發展前景。但現有技術的研究更多地集中在基礎理論及理想化環境中的應用程度,距離在實際環境中多種復雜任務的廣泛應用仍然有相當的距離。可以預計在未來,隨著航行器載體智能化和自主化程度的進一步提高以及水下集群協同技術的進一步突破,AUV 智能集群將在海洋探索、海洋開發與保護、維護國家海洋權益方面發揮重要作用。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
