復雜天氣狀況下的太陽能混合跟蹤系統及控制判據
2023-05-15 03:43:44王立舒房俊龍夏浩楠李欣然
農業工程學報 2023年5期
關鍵詞:系統
王立舒,陳 曦,房俊龍,夏浩楠,劉 祺,李欣然,白 龍
·農業生物環境與能源工程·
復雜天氣狀況下的太陽能混合跟蹤系統及控制判據
王立舒1,陳 曦1,房俊龍1※,夏浩楠1,劉 祺1,李欣然1,白 龍1,2
(1. 東北農業大學電氣與信息學院,哈爾濱 150030;2. 牡丹江師范學院物理與電子工程學院,牡丹江 157011)
為了解決傳統太陽能混合跟蹤控制判據范圍寬泛,不能準確識別天氣情況的問題,該研究設計了一種復雜天氣狀況下的太陽能混合跟蹤系統。通過分析非聚光與聚光條件下系統運行在不同跟蹤策略下的跟蹤特性,結合天氣特征,提出以輻照度識別天氣狀況的多閾值控制判據。控制判據將天氣劃分為輻照度波動天氣、高輻照度天氣、低輻照度天氣與輻照度極低天氣,裝置可根據外界氣象變化自動調整光電跟蹤、視日運動軌跡跟蹤或固定傾角控制模式。該系統搭建Node-Red總控平臺,采用并行控制,優化混合跟蹤策略,控制信號穩定輸出。試驗結果表明:應用該判據的混合跟蹤系統工作性能優良,非聚光條件下系統平均發電功率分別高出光電跟蹤與視日運動軌跡跟蹤0.03和0.16 W,聚光條件下系統平均發電功率達到0.81 W,高出光電跟蹤0.03 W,高出視日運動軌跡跟蹤0.55 W,由此可知,該系統能夠提升光伏發電的輸出電能,為太陽能混合跟蹤系統的跟蹤方式切換提供了理論依據。
太陽能;輻照度;試驗;混合跟蹤;發電功率;判據
0 引 言
太陽能作為一種清潔的可再生能源憑借著儲量優勢在能源需求巨大的當今社會扮演著重要的角色[1-2]。然而太陽空間位置多變,光照強度空間分布受到氣候、時間的影響,導致太陽能源利用率始終低于預期狀態[3]。引入跟蹤系統是提高太陽能利用率的有效途徑,相比于靜態鋪設,動態跟蹤系統能源接受率可提高30%以上[4]。
太陽能跟蹤技術根據控制方式不同可分為視日運動軌跡跟蹤、光電跟蹤以及兩者結合的混合跟蹤[5]。研究表明,混合跟蹤能夠兼顧光電跟蹤與視日運動軌跡跟蹤的優勢,已成為太陽能跟蹤技術的主流方向[6]。郭會超等[7]設計了一種光電跟蹤為主,輔以視日運動軌跡跟蹤的混合跟蹤系統。將智能檢測與自適應技術相結合,但該技術僅停留在理論層面,缺乏試驗驗證。樊海紅等[8]提出了一種將光電跟蹤與視日運動軌跡跟蹤結合的太陽方位雙模式跟蹤系統,通過光照強度識別陰晴天氣,晴天采用光電跟蹤,陰天采用視日運動軌跡跟蹤,依據光強傳感器映射的數值大小進行切換,這也是目前較常用的一種切換方式[9]。但常見天氣光照強度覆蓋范圍廣,約為0~100 000 lx[10-12],光照強度控制判據范圍劃分寬泛,不能準確區分不同天氣情況。且傳統混合跟蹤系統多采用單一閾值對天氣進行分類,管理不同跟蹤模式的相互切換[13],而多云等復雜天氣的天氣特性不同,單一閾值則難以區分。此外,傳統的光強檢測元件多采用光敏傳感器,傳感器的光電特性并非線性[14],以其輸出的光強值作為切換依據也不夠精準。也有研究人員通過改進光強傳感器[15]或引進圖像識別技術[16]提高混合跟蹤系統效率,但以上方式對設備要求較為苛刻且成本較高。
相比于描述光場分布物理量的光照強度[17],輻照度具有面能量特性[18],與光伏電池發電功率具有更直觀的特性關聯[19],利于系統分析。且太陽輻照度對于天氣類型起決定性作用[20],可由輻照度反映不同天氣特性。輻照度是分析太陽能發電性質的重要參數,以輻照度作為混合跟蹤判據能夠將混合跟蹤技術與太陽能發電特性相聯系。為此,本文整合現有技術優勢,設計了一種基于輻照度的太陽能混合跟蹤系統,提出結合復雜天氣識別的多閾值控制判據。研究系統在不同跟蹤策略下接收輻照度與發電功率曲線,監測電池板溫度變化,探究天氣輻照度特性,建立混合跟蹤方案。通過現場試驗,分析聚光與非聚光條件下系統工作性能與跟蹤效果。系統采用并行控制,光電跟蹤與視日運動軌跡跟蹤控制單元獨立運行,控制信號指令穩定輸出,為實際生產提供參考。
1 太陽能混合跟蹤系統原理
1.1 混合跟蹤系統工作原理
視日運動軌跡跟蹤能根據天文算法推算出太陽在任意地點任意時間的相對位置,但計算過程中會產生累積誤差,跟蹤精度無法保證。光電跟蹤利用光敏檢測元件感知太陽位置,能保證跟蹤精度,但極易受外界干擾。混合跟蹤將兩者結合,當天氣晴朗時使用光電跟蹤,以傳感器的瞬時反饋對視日運動軌跡跟蹤的累計誤差進行修正[21],當外界光照條件不理想時,采用視日運動軌跡跟蹤,彌補光電跟蹤誤動短板。
本系統采用混合跟蹤技術,通過輻照度判斷當前天氣情況切換控制模式。陽光充足時,系統進入光電跟蹤模式,光線較弱時,系統進入視日運動軌跡跟蹤模式,外界光照極其微弱時,系統進入固定傾角模式。視日運動軌跡跟蹤部分為保證跟蹤精度選用Jean Meeus算法,計算結果的不確定度可達±0.000 3°[22],光電跟蹤部分參考四象限光電探測器中和差比幅的處理方法[23],實時感知太陽光線的位置變化。
1.2 視日運動軌跡跟蹤原理
本系統選用的Jean Meeus法主要是基于儒略日、儒略世紀、黃道坐標系等因素先計算赤緯角與時角,再通過球面坐標方程計算太陽高度角與方位角[24],對太陽運行軌跡進行綜合分析,圖1為太陽位置計算的地平坐標系幾何模型。
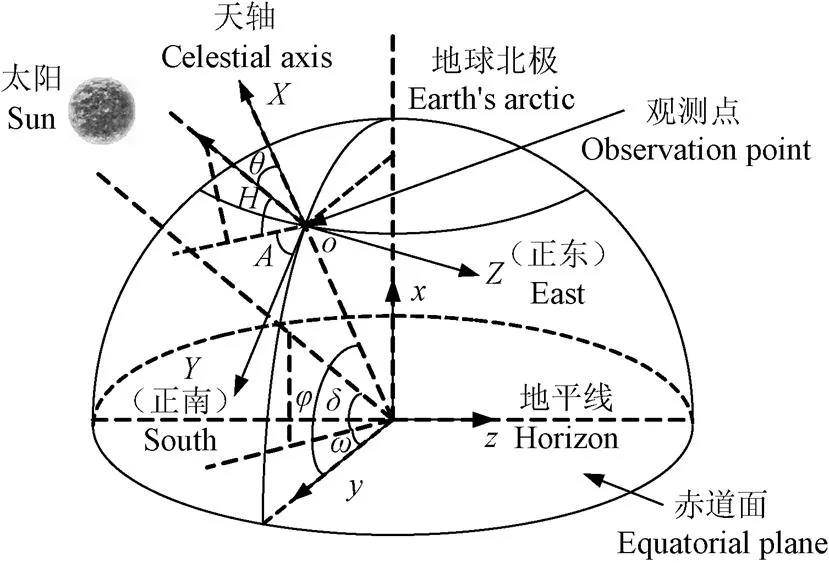
注:地平坐標系X軸為天頂方向,Y軸為正南方向,Z軸為正東方向;θ為天頂角,(°);H為高度角,(°);A為方位角,(°);φ為地理緯度,(°);δ為赤緯角,(°);ω為時角,(°)。
由于Jean Meeus天文算法公式較為復雜,為了清晰表達坐標關系,本研究根據文獻[25]引入中間變量來合并原計算方法中的計算式,計算太陽高度角與方位角。太陽赤緯角的計算式如下:

式中為太陽赤緯角,(°);為訂正黃赤交角,(°);1為中間變量。


式中為平均黃赤交角,(°);J為標準歷元J2000起計算的儒略世紀。
為太陽方位角,以正南方向為180°,正東方向為90°,正西方向為270°,2為中間變量。
圖中可以看出天頂角與太陽高度角兩角互余,天頂角計算式如下:

式中為太陽天頂角,(°);為當地緯度,(°);為太陽赤緯角,(°);為太陽時角,(°)。
考慮大氣折射影響后的訂正太陽高度角H如下:
式中為大氣折射訂正值,該數值取值與太陽高度角所在范圍有關。
支架跟蹤角度需計算高度跟蹤角與方位跟蹤角,采用太陽方位角與訂正太陽高度角H進行跟蹤角度計算,計算式如下:
式中1為控制高度的跟蹤角,(°);2為控制方位的跟蹤角,(°)。
Jean Meeus天文算法公式繁雜且運算量大,單片機需要能夠快速精確定位太陽位置,要求單片機必須具有較高的處理速度。為此,本文選用STM32F407單片機作為視日運動軌跡跟蹤控制單元,相比于常見的51單片機與PLC單片機,STM32具有更高的性能與更快的數據連接和通訊速度。
1.3 光電跟蹤原理
本系統選用4個光電一致性較好的光敏電阻模塊,對稱安裝在十字擋板組成的4個象限內,通過轉化陰影區產生的偏移信號驅動裝置實時跟蹤。
圖2為光電跟蹤算法原理。當太陽光入射光電傳感器矩陣時,遮光板會導致4個象限傳感器接收的光照強度互不相同[26]。控制器將采集對應象限的電壓信號,利用電壓偏差信號驅動舵機轉動,計算式如下:
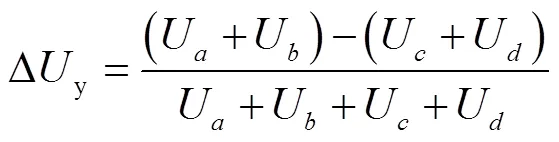
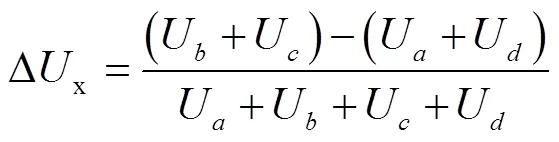
式中U、U、U、U分別為Ⅰ、Ⅱ、Ⅲ、Ⅳ象限傳感器的電壓測量值;ΔU、ΔU為電壓偏差。
電壓比較算法僅能指示舵機的旋轉方向,不能直接判斷角位移量,無需復雜的計算過程,故對單片機的計算能力沒有較高要求。本文選用Arduino單片機作為光電跟蹤控制單元,依據工程經驗選定擋板高度為70 mm,光電傳感器間隔距離為11.5 mm。
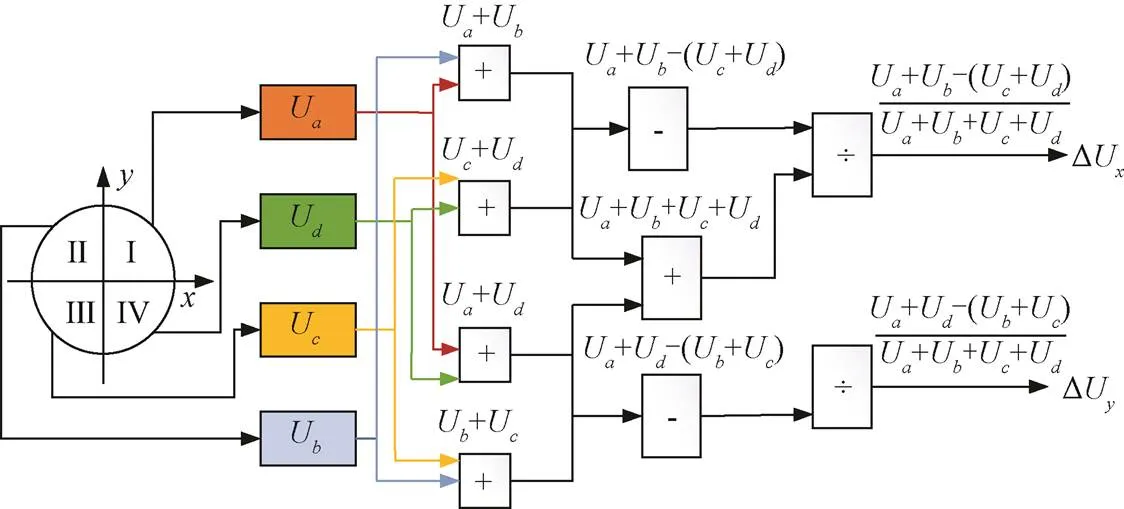
注:4個光敏電阻模塊組成光電傳感器矩陣,其中Ua、Ub、Uc、Ud分別為Ⅰ、Ⅱ、Ⅲ、Ⅳ象限光敏電阻模塊的電壓測量值,(V);ΔUx為水平方向的電壓偏差,(V);ΔUy為垂直方向的電壓偏差,(V)。
2 太陽能混合跟蹤系統設計
2.1 混合跟蹤裝置設計
傳統混合跟蹤系統控制兩種跟蹤模式互相切換時需要較高的配合度,當遇到外力因素進行光電校正后,易引起視日運動軌跡跟蹤采用的坐標系發生變化,可能造成嚴重偏離太陽方向的后果[27]。基于以上考慮,本文設計的混合跟蹤裝置采用并行控制,光電跟蹤與視日運動軌跡跟蹤算法運行在獨立的控制單元,系統由光電傳感器、輻照度傳感器、CD4052信號切換模塊、樹莓派控制器、Arduino光電跟蹤控制單元、STM32視日運動軌跡跟蹤控制單元及雙自由度舵機云臺組成。混合跟蹤裝置的結構如圖3所示。
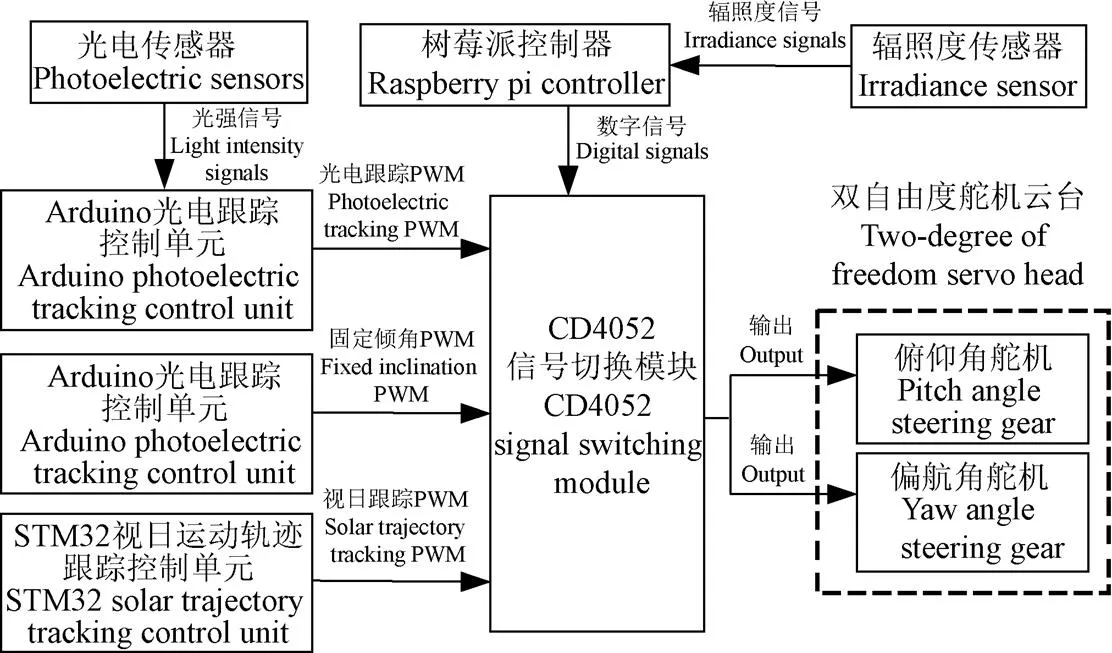
圖3 太陽能混合跟蹤系統結構圖
混合跟蹤系統以樹莓派作為主控制器進行數據處理,向CD4052信號切換模塊傳輸數字信號發出控制命令。其中,Arduino光電跟蹤控制單元運行四象限電壓比較算法,通過模擬引腳讀取電壓值判斷太陽位置,輸出光電跟蹤信號,STM32視日運動軌跡跟蹤控制單元通過Jean Meeus天文算法計算太陽位置坐標與跟蹤角,輸出視日運動軌跡跟蹤信號,固定傾角信號由Arduino光電跟蹤控制單元穩定輸出。信號切換模塊同時接收3路并行的光電跟蹤PWM信號、視日跟蹤PWM信號與固定傾角PWM信號,結合輻照度反映的天氣情況,由主控制器選擇對應控制模式的PWM信號通過,驅動俯仰角舵機與偏航角舵機動作。
2.2 Node-Red混合跟蹤模式切換設計
混合跟蹤系統選擇樹莓派中的Node-Red編程工具,進行跟蹤模式切換設計,該工具以拖放的形勢搭建系統流程,通過瀏覽器上的編輯器設計節點快速連接硬件設備[28]。控制界面如圖4所示。
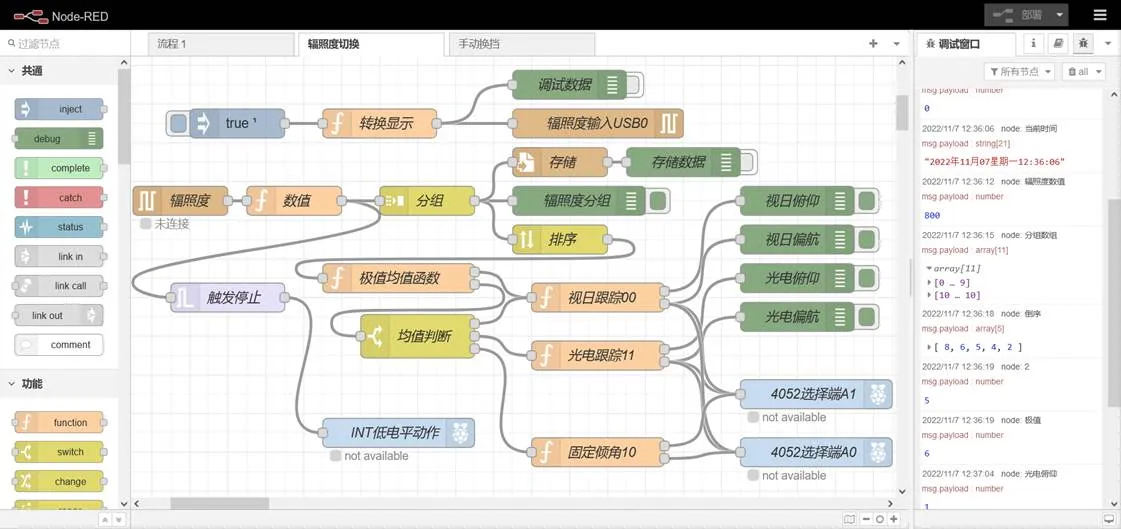
圖4 Node-Red控制界面
樹莓派首先利用split、function及switch節點將獲取的天氣輻照度數值進行分組與劃分,其次給出3種控制模式(光電跟蹤、視日運動軌跡跟蹤、固定傾角)的選擇信號,最后通過向CD4052選擇端A0/A1輸入高/低電平的方式向外界輸送選擇信號,依據天氣輻照度變化切換跟蹤模式。系統工作過程中持續供給CD4052使能端低電平信號保證開關芯片導通,調試窗口可以實時監測到當前的輻照度值與控制模式,掌握舵機的運行狀態。
3 混合跟蹤系統研制及控制判據
3.1 非聚光太陽能混合跟蹤系統樣機試驗
試驗地點為哈爾濱市東北農業大學(45°74′N,126°73′E),選取2022年5月20日到2022年6月5日08:00-16:40進行非聚光太陽能混合跟蹤系統試驗。每隔20 min進行一次測量,測量持續時間為1 min,首先在光電跟蹤模式下測量多組數據,之后在視日運動軌跡跟蹤模式下測量多組數據,記錄不同跟蹤模式運行時系統的電壓、電流、輻照度、溫度數據,計算對應時刻不同跟蹤模式下光伏電池的發電功率。為保證視日運動軌跡跟蹤準確運行,需采用指南針調整裝置的起始運行位置朝向正南方向,非聚光跟蹤試驗如圖5所示。
非聚光跟蹤試驗選用1片80 mm×80 mm尺寸的多晶硅光伏電池,通過上位機信號切換光電跟蹤模式與視日運動軌跡跟蹤模式,分析不同天氣下2種跟蹤模式的切換依據并對判據展開研究。
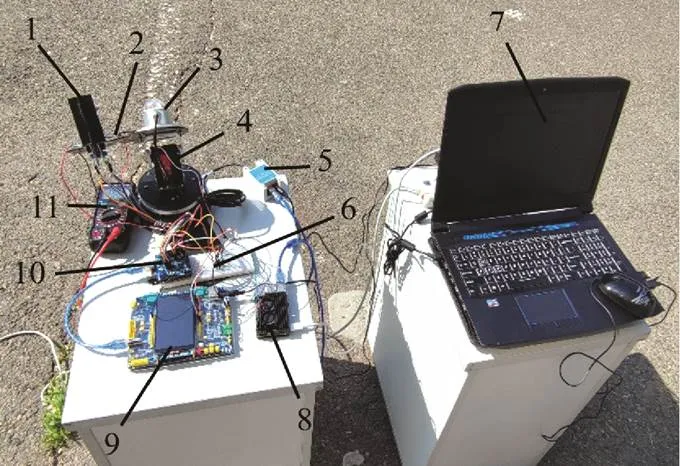
1.光電傳感器 2.光伏電池板 3.輻照度傳感器 4.雙自由度舵機云臺 5.USB通訊模塊 6.CD4052信號切換模塊 7.PC端 8.樹莓派控制器 9.STM32視日運動軌跡跟蹤控制單元 10.Arduino光電跟蹤控制單元 11.萬用表
圖6為非聚光晴天、多云天下太陽能跟蹤系統運行在不同跟蹤模式下的輻照度與發電功率曲線。晴天數據選取5月23日分析系統跟蹤特性,光電跟蹤與視日運動軌跡跟蹤模式接收的輻照度與發電功率曲線如圖6a所示。
晴天光電跟蹤接收的輻照度與發電功率普遍高于視日運動軌跡跟蹤,光電跟蹤與視日運動軌跡跟蹤獲取的太陽輻照度值變化趨勢基本保持一致。由于大氣折射與機械誤差等因素,導致視日運動軌跡跟蹤計算出的動作位置與實際地面輻照度最強位置存在偏差。該偏差在11:00-13:00間達到峰值,視日運動軌跡跟蹤接收的輻照度同光電跟蹤最多可相差221 W/m2,正午時段視日運動軌跡跟蹤發電功率較低。
5月23日晴天最高輻照度達到1 153 W/m2,當輻照度值處于835~1 153 W/m2之間時,相同時間段光電跟蹤接收的太陽輻射更多且發電功率更高。此時光電跟蹤能始終保持太陽垂直照射光伏電池板,但在15:00之后出現光電跟蹤接收的太陽輻照度值急劇波動的現象(圖6a)。由圖6b可知,5月23日15:00-17:00時段內出現長時間云層遮擋,隨著太陽西落,輻照度逐漸下降。光電跟蹤控制下的舵機開始頻繁動作,系統頻繁調整位置導致光電跟蹤效果變差。當光電跟蹤接收的輻照度數值降到339 W/m2時,視日運動軌跡跟蹤接收輻照度為621 W/m2,此時視日運動軌跡跟蹤接收輻照度更高,具有較高的發電功率輸出。
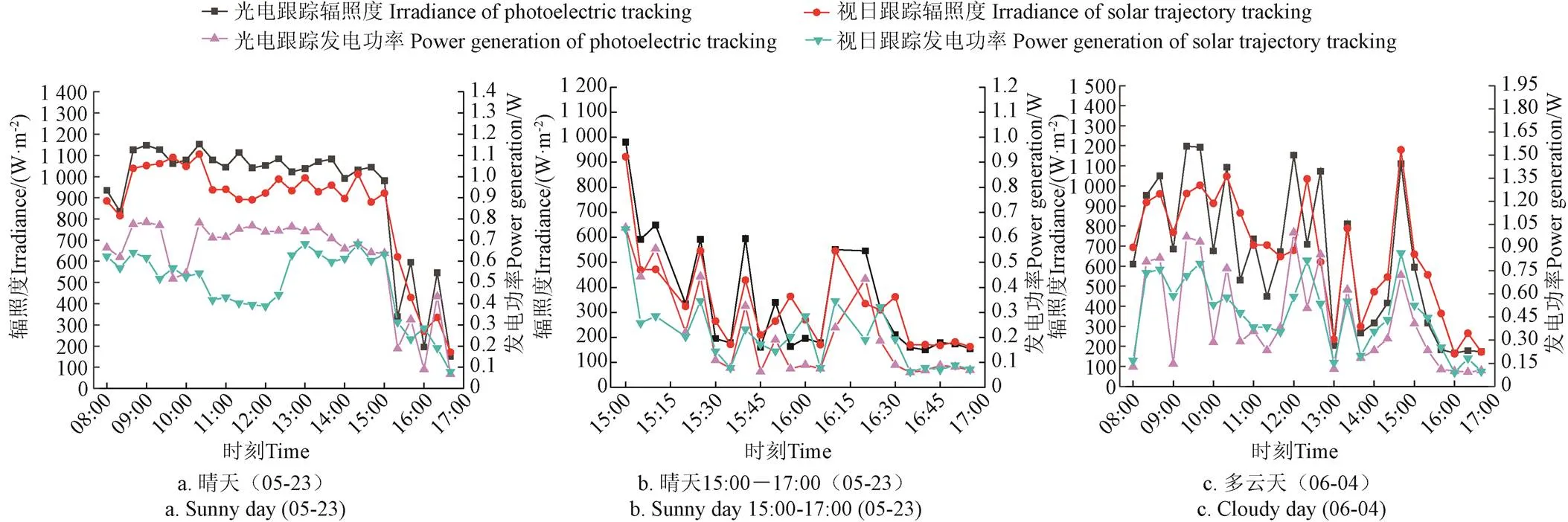
圖6 非聚光太陽能跟蹤系統不同跟蹤模式輻照度及發電功率
試驗選取6月4日分析多云天氣下系統的跟蹤特性,光電跟蹤與視日運動軌跡跟蹤模式接收的輻照度及系統發電功率如圖6c所示。由圖6c可知,6月4日多云天氣的輻照度波動較大且波動明顯,20 min內輻照度值波動可達869 W/m2。在試驗過程中發現,該種天氣類型下1 min內輻照度的波動約為340~500 W/m2。光電跟蹤模式下裝置將一直跟隨輻照度變化反復動作尋找輻射最強位置,發電功率于0.09~0.99 W之間頻頻波動,全天平均發電功率為0.43 W。而視日運動軌跡跟蹤運行較為穩定,全天平均發電功率0.47 W,更適合在該天氣下運行。
理想條件下太陽能跟蹤系統的發電功率曲線應基本與輻照度曲線一致,測量過程中發現溫度是造成發電功率曲線較差的主要原因,光伏轉換產生的電能還受光伏電池工作溫度值的影響[29-30]。非聚光晴天、多云天下光電跟蹤與視日運動軌跡跟蹤模式下系統的發電功率與光伏電池板溫度曲線如圖7所示。
晴天溫度對于發電功率的影響強于多云天氣。由圖7a可知,晴天13:00-14:00高溫環境下,光電跟蹤系統發電功率由0.74 W下降到0.66 W,視日運動軌跡跟蹤系統發電功率由0.68 W下降到0.59 W,尤其在13:40,光伏電池板40 ℃的溫度累積使光電跟蹤與視日運動軌跡跟蹤系統發電功率降低分別達0.05和0.04 W。根據圖7b可知,對于多云天氣,溫度波動明顯且平均溫度低于晴天,此時輻照度在系統發電功率變化中起主導作用。
基于上述非聚光條件下的試驗結果可知,非聚光跟蹤系統晴天上午到正午光電跟蹤接收輻照能量高于視日運動軌跡跟蹤。當光電跟蹤輻照度在339~150 W/m2范圍內時,出現光電傳感器感光失調,舵機頻繁動作,光電跟蹤接收輻照度低于視日運動軌跡跟蹤。多云天氣輻照度值短時間內波動較大,該種天氣下視日運動軌跡跟蹤受輻照度變化影響相對較小。
3.2 聚光太陽能混合跟蹤系統樣機試驗
聚光跟蹤試驗選用1片10 mm×10 mm尺寸的GaAs光伏電池,將菲涅爾透鏡放置于木制支架上聚光并安裝水冷裝置。該試驗在水冷裝置中加入制冷片,加大冷卻效果,避免高倍聚光試驗的危險性。選取2022年6月13日到2022年6月28日08:00-16:40進行聚光太陽能混合跟蹤系統試驗。每間隔20 min進行一次測量,每次跟蹤模式測試時間為1 min,測試順序為先進行光電跟蹤測量,再切換為視日運動軌跡跟蹤進行測量。聚光跟蹤試驗如圖8所示。
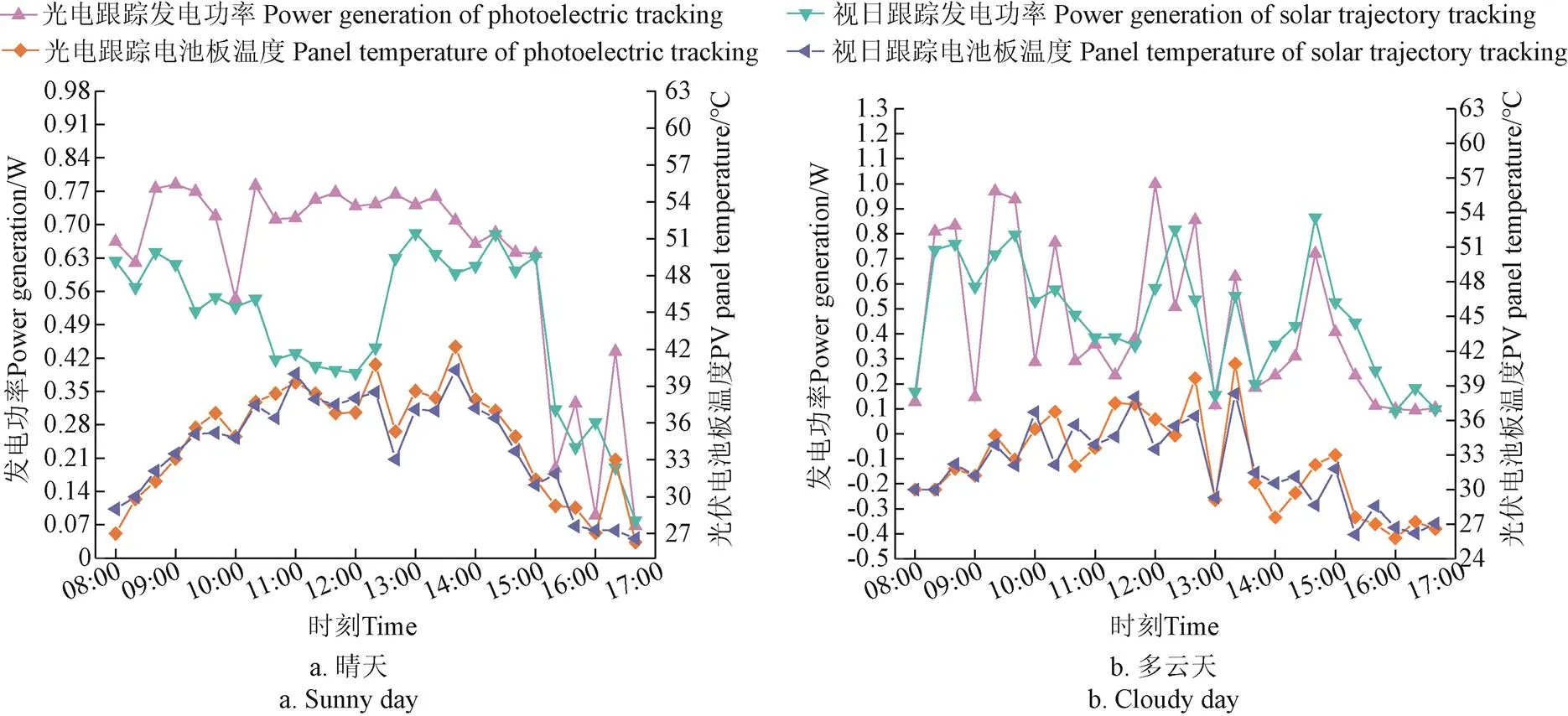
圖7 非聚光太陽能跟蹤系統不同跟蹤模式發電功率及光伏電池板溫度
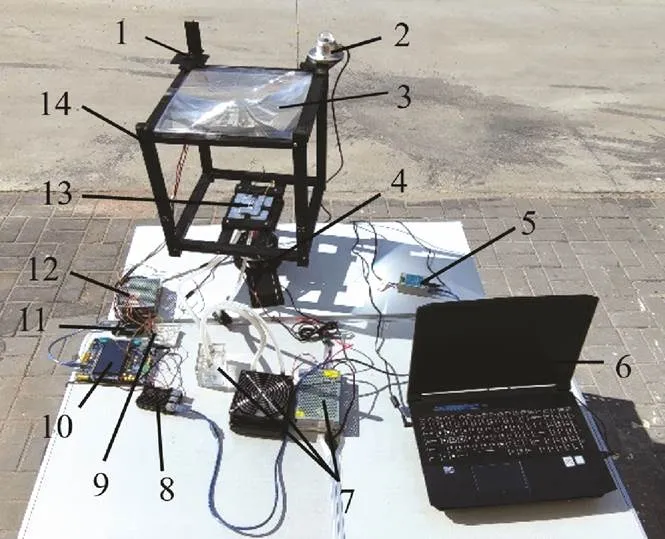
1.光電傳感器 2.輻照度傳感器 3.菲涅爾透鏡 4.雙自由度舵機云臺 5.USB通訊模塊 6.PC端 7.水冷裝置 8.樹莓派控制器 9.CD4052信號切換模塊 10.STM32 視日運動軌跡跟蹤控制單元 11.Arduino光電跟蹤控制單元 12.蓄電池 13.GaAs光伏電池 14.木制支架
試驗選取2022年6月28日的測量數據分析系統的聚光跟蹤特性,該日08:00后為晴天,11:40至16:40為多云天,便于探尋不同天氣下系統的跟蹤性質及切換依據。聚光試驗采集輻照度、電壓、電流、發電功率數據過程與非聚光試驗一致,聚光不同跟蹤模式下系統接收的輻照度及發電功率如圖9所示。
由圖9可知,聚光條件下光電跟蹤接收的輻照度及發電功率均高于視日運動軌跡跟蹤,11:00-11:40出現2種跟蹤模式接收輻照度雖然相差小(差值均低于97 W/m2),但光電跟蹤系統發電功率遠遠大于視日運動軌跡跟蹤的情況。因為此時電池表面出現明顯光斑,視日運動軌跡跟蹤方式的計算偏差導致光斑位置偏移,不同于光電跟蹤下電池的直射儲能,視日運動軌跡跟蹤下的電池不能被光斑時刻覆蓋,故與光電跟蹤發電功率相差甚遠。13:20光電跟蹤下的系統發電功率高達3.03 W,而視日運動軌跡跟蹤下的系統發電功率僅有0.09 W。
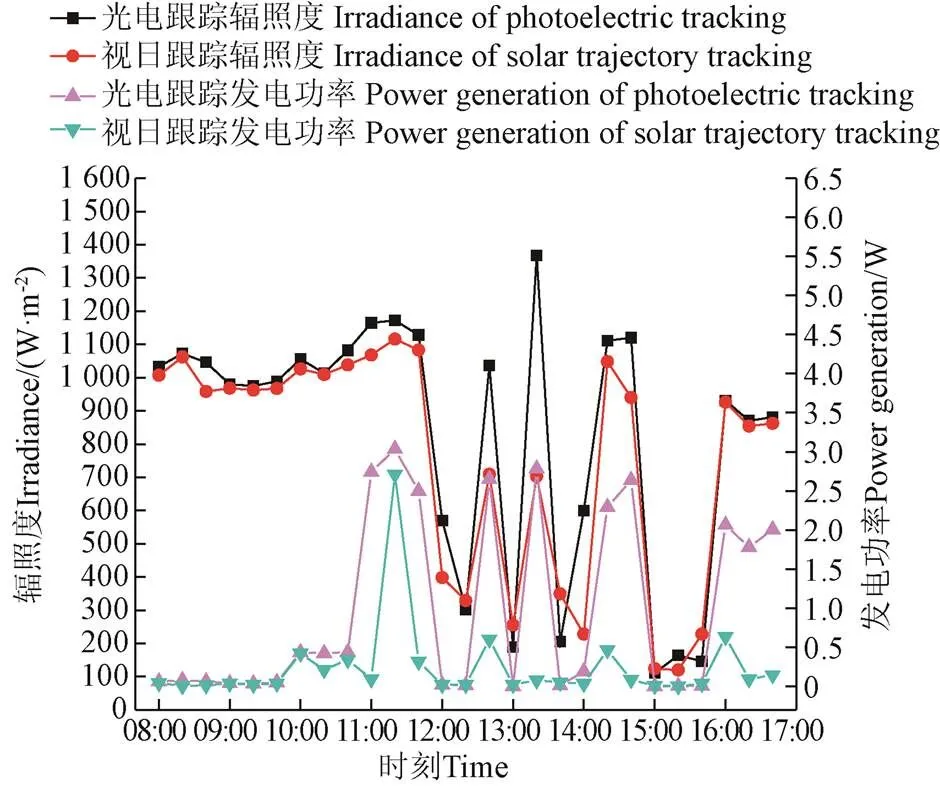
注:該日08:00-11:40為晴天,11:40-16:40為多云天。
基于上述聚光條件下的試驗結果可知,聚光跟蹤系統晴天光電跟蹤效果明顯優于視日運動軌跡跟蹤。由圖9可知,光電跟蹤接收輻照度為302~111 W/m2時,存在光電跟蹤系統發電功率小于視日運動軌跡跟蹤系統發電功率的現象,此時光電跟蹤接收輻照度小于視日運動軌跡跟蹤,光斑擴散模糊甚至消失。當出現多云情況時,光電跟蹤現象同非聚光測試效果一致,存在多動現象,即裝置會跟隨太陽輻照變化反復跟蹤尋找輻照度最強位置。
3.3 混合跟蹤系統控制判據研究
本系統的總體研究方案是在不同的天氣情況下運行不同的跟蹤方式。太陽能跟蹤系統電能主要來源于光伏組件表面輻照能量的轉化[31],光伏發電需要表面更高的輻照度,因此混合跟蹤系統依據輻照能量進行切換。
太陽輻照度對于天氣類型起決定性作用[20],不同天氣特征可體現為輻照度的變化。相關氣象研究表明:晴天輻照度范圍約為500~1 400 W/m2,陰雨天輻照度范圍約為10~491 W/m2,多云天氣輻照度范圍涵蓋晴天與大部分陰雨天范圍,約為250~1 400 W/m2[32-34]。實測數據發現,雖然多云天氣會出現高輻照度,但輻照度數據在1 min內波動幅度較大。陰雨天輻照度數據較低,雨天輻照度均低于100 W/m2,處于極低水平。參考以上天氣的輻照度范圍,結合樣機試驗的測量數據,系統控制判據基于輻照度將天氣劃分為輻照度波動天氣、高輻照度天氣、低輻照度天氣與輻照度極低天氣,通過識別天氣對應的輻照度變化切換控制模式。
考慮到系統輻照度傳感器響應時間≤5 s,為保證輻照度測量數據的可靠性與系統指令輸出的及時性,本系統設定輻照度傳感器每6 s回傳一次輻照度信息,選取1 min內的10個輻照度數值進行極值與均值數學計算,同閾值比較確定當前的天氣類別。系統基于上述4類天氣設定判據,設定輻照度波動判定閾值為,高輻照度判定閾值為,極低輻照度判定閾值為。設定10個輻照度數據中極大值為max,極小值為min,均值為v。
由于非聚光與聚光條件不會影響輻照度傳感器的測試結果,因此,非聚光與聚光系統判據設置一致。標準狀況下輻照度為1 000 W/m2時,誤差為±3%,考慮儀器最大誤差值30 W/m2,基于上述非聚光與聚光太陽能混合跟蹤試驗數據選擇判據閾值。
對于閾值:多云天氣的輻照度數值范圍變化為167~1 193 W/m2,1 min內波動約為340~500 W/m2。光電傳感器感光失調導致舵機頻繁動作,切換為視日運動軌跡跟蹤是該類天氣更理想的運行模式。多云天氣判定計算時需取輻照度差值,誤差近似為0,因此,閾值取340 W/m2,以判定輻照度波動天氣。對于閾值:系統測試晴天輻照度較高時,光電跟蹤接收的輻照度明顯高于視日運動軌跡跟蹤。隨著輻照度逐漸降低,光電跟蹤模式運行下的裝置出現多動現象,非聚光條件下光電跟蹤接收輻照度低于視日運動軌跡跟蹤的輻照度范圍為339~150 W/m2。聚光條件下光電跟蹤接收輻照度低于視日運動軌跡跟蹤的輻照度范圍為302~111 W/m2。當非聚光條件輻照度低于339 W/m2、聚光條件輻照度低于302 W/m2時均可能出現光電跟蹤多動現象。因此,輻照度高于339 W/m2時光電跟蹤運行效果較為穩定,考慮輻照度傳感器誤差30 W/m2,閾值取370 W/m2以判定適合光電跟蹤的高輻照度天氣。對于閾值:經測試,類似雨天等輻照度極低天氣,輻照度值均在100 W/m2以下,平均輻照度值為51.8 W/m2,發電功率極低不宜采用跟蹤裝置。因此,考慮儀器誤差為30 W/m2,輻照度低于100 W/m2時停止跟蹤,閾值取130 W/m2以判定輻照度極低天氣。判據設定如表1所示。
判據的天氣范圍界定與閾值設定一一對應,輻照波動天氣輻照度范圍較廣,涵蓋其他天氣情況的輻照度范圍,在系統運行中需先行判定輻照度波動天氣。判據設置1 min內輻照度波動高于340 W/m2為輻照度波動天氣,輻照度極值差(max-min)大于閾值,判定為輻照度波動天氣。在排除輻照度波動天氣后,輻照度高于370 W/m2為高輻照度天氣,介于370~130 W/m2之間為低輻照度天氣,低于130 W/m2為輻照度極低天氣,通過均值v與閾值、比較確定以上天氣。對于復雜天氣情況如輕霧、雷陣雨、沙塵暴[35-36]等惡劣天氣,可將天氣狀況依據輻照強度變化進行分類,使用輻照度判據切換跟蹤模式適應復雜天氣情況。
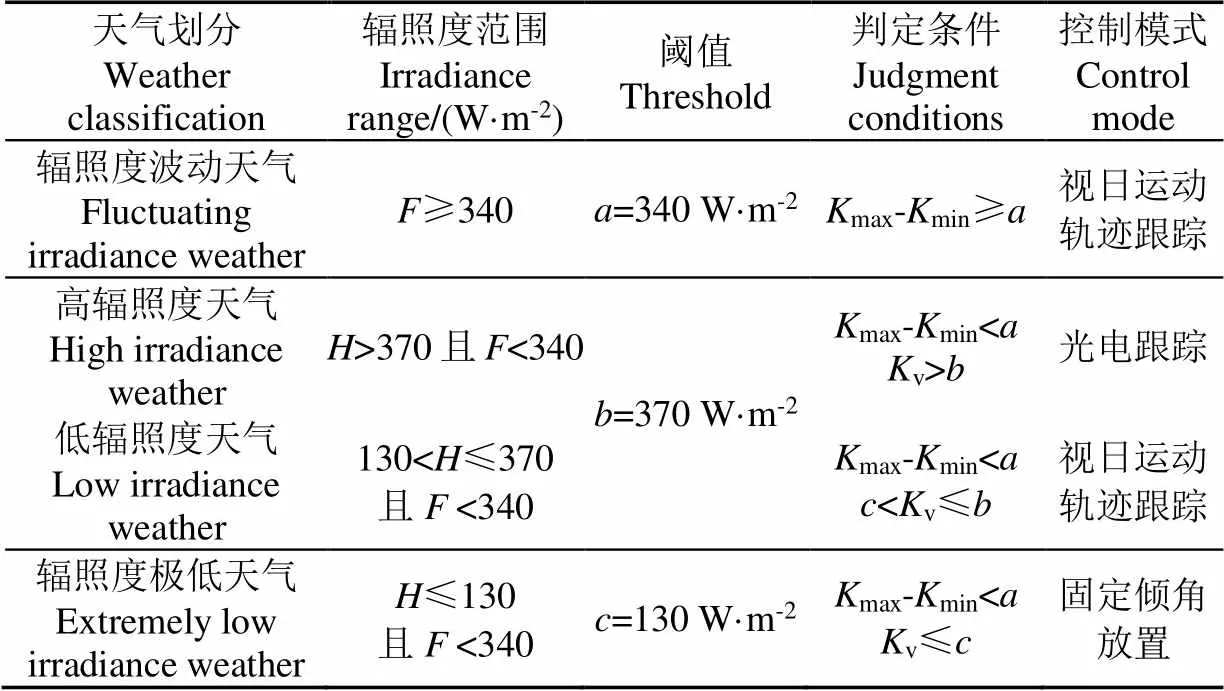
表1 混合跟蹤系統控制判據設定
注:為當前輻照度值,(W·m-2);為1 min內輻照度的波動值,(W·m-2);max、min、v分別為1 min內10個輻照度值中極大值、極小值與平均值,(W·m-2)。
Note:is the current irradiance value, (W·m-2);is the fluctuation value of irradiance in one minute, (W·m-2);max,minandvare the maximum, minimum and average values of 10 irradiance values in one minute respectively, (W·m-2).
混合跟蹤系統切換控制模式流程見圖10。跟蹤系統提取傳感器回傳的輻照度數據組進行計算,確定系統當前運行的跟蹤模式。此外,根據工程經驗,系統參考哈爾濱地區光伏組件最佳安裝傾角數據,預設俯仰角43°方位角0°為固定傾角位置。
3.4 試驗結果
測試時間選取2022年6月30日到2022年7月30日08:00-16:00,前15 d進行非聚光試驗,后15 d進行聚光試驗。非聚光與聚光條件下太陽能跟蹤系統試驗裝置同上文保持一致。為驗證判據對混合跟蹤系統的控制效果,每日試驗僅在一種跟蹤模式下運行,選取輻照度近似,天氣較為晴朗的試驗數據進行分析。在非聚光與聚光條件下分別選取3 d試驗數據,對光電跟蹤、視日運動軌跡跟蹤與混合跟蹤模式下系統的發電功率進行對比,驗證判據的控制效果。試驗過程中每20 min記錄1次系統發電功率數值,取每小時數據的平均值作為該小時的發電功率數據,結果見表2。
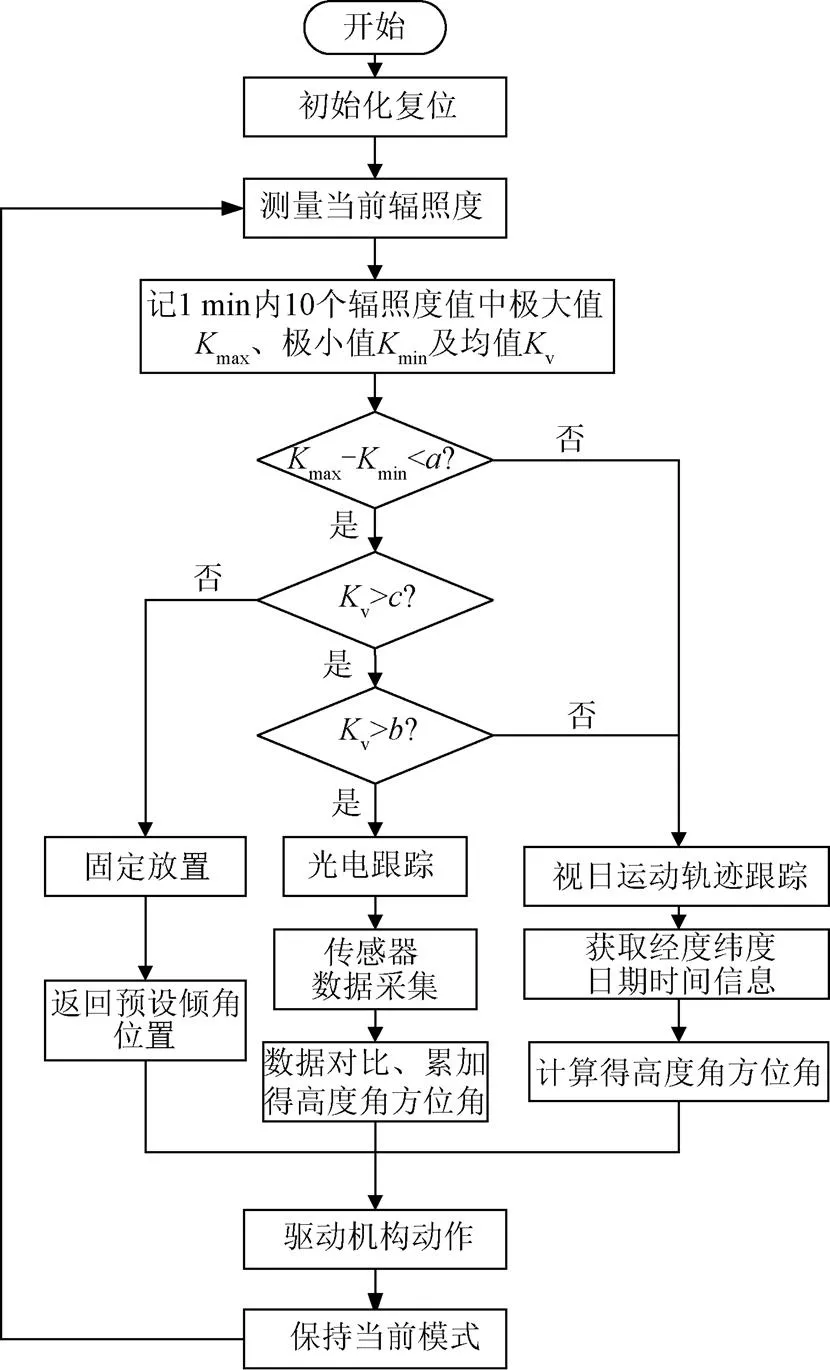
圖10 太陽能混合跟蹤系統控制流程
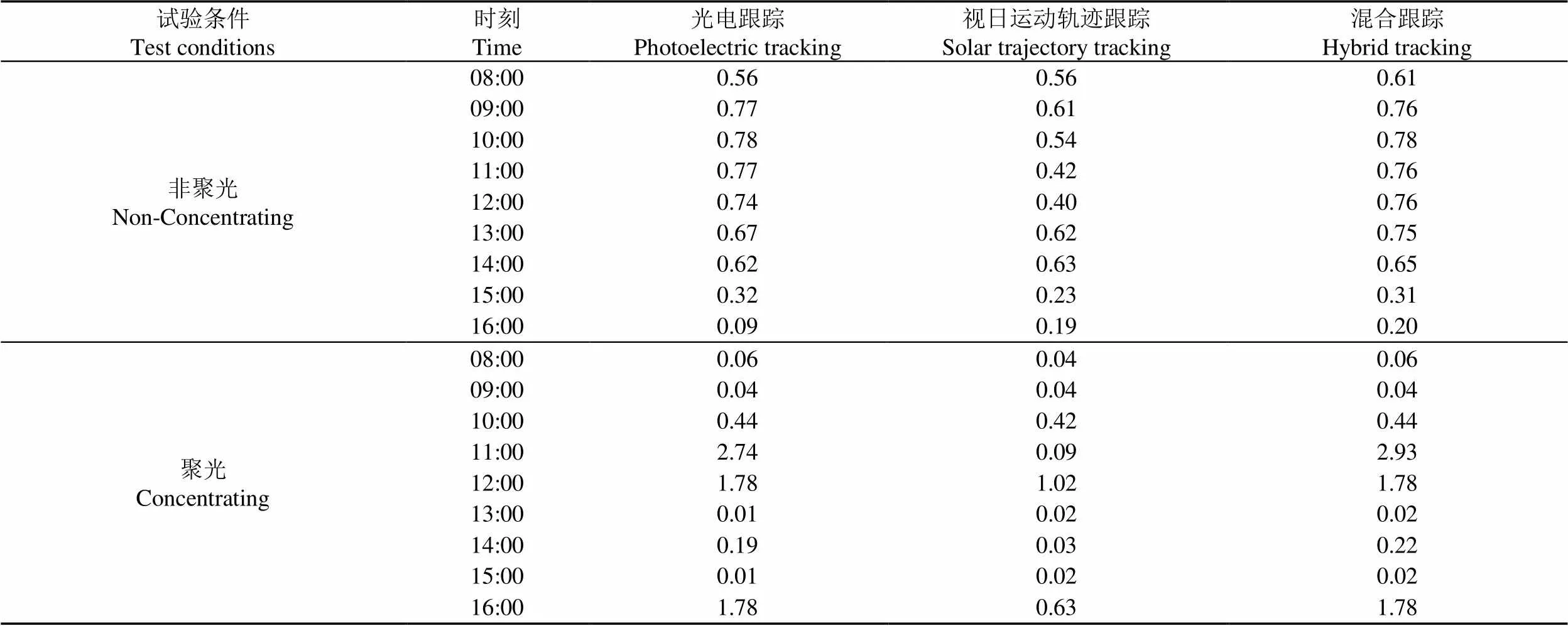
表2 非聚光與聚光條件下不同跟蹤模式系統發電功率
非聚光不同跟蹤模式下系統發電功率相對接近。視日運動軌跡跟蹤全天平均發電功率0.46 W,11:00—12: 00光電跟蹤發電功率值明顯高于視日運動軌跡跟蹤,此時視日運動軌跡跟蹤計算偏差值較大,因此接收輻照度偏低,光伏電池板不能垂直對準太陽導致發電功率較低。光電跟蹤全天平均發電功率0.59 W,比視日運動軌跡跟蹤高出0.13 W,正午輻照度較高,光電跟蹤具有一定優勢。混合跟蹤全天平均發電功率0.62 W,比光電跟蹤平均發電功率高出0.03 W,比視日運動軌跡跟蹤平均發電功率高出0.16 W,證實了該判據在非聚光條件下的可行性。
聚光不同跟蹤模式下系統發電功率具有明顯差距。視日運動軌跡跟蹤全天平均發電功率為0.26 W,光電跟蹤全天平均發電功率為0.78 W。混合跟蹤全天平均發電功率為0.81 W,高出光電跟蹤0.03 W,高出視日運動軌跡跟蹤0.55 W,證實了該判據在聚光條件下的有效性。
4 結 論
本文針對傳統混合跟蹤判據不能準確識別天氣的問題,提出了基于輻照度劃分復雜天氣情況的多閾值控制判據,分別進行了非聚光與聚光條件下的跟蹤試驗,得到以下結論:
1)溫度升高會降低電池板發電功率。溫度恒定條件下,輻照度是決定光伏電池輸出功率變化的主導因素,因此,混合跟蹤系統需跟蹤高輻照度以獲得更高的發電量。
2)輻照度的變化可直觀體現不同的天氣情況。本文參考氣象數據并結合試驗測量數據,將天氣類型劃分為輻照度波動天氣、高輻照度天氣、低輻照度天氣與輻照度極低天氣。設定1 min內輻照度波動不低于340 W/m2為輻照度波動天氣判定條件,排除輻照度波動天氣后,輻照度高于370 W/m2為高輻照度天氣,介于370~130 W/m2之間為低輻照度天氣,低于130 W/m2為輻照度極低天氣。該分類方式可依據當前天氣對應的輻照度變化驅動裝置動作,不受復雜天氣類型限制,具有一定的適普性。
3)本文基于非聚光與聚光條件下4類天氣的系統跟蹤效果設定輻照度閾值及控制判據。采用該控制判據的混合跟蹤系統非聚光條件下平均發電功率分別高出光電跟蹤與視日運動軌跡跟蹤0.03和0.16 W,聚光條件下混合跟蹤系統平均發電功率高出光電跟蹤0.03 W,高出視日運動軌跡跟蹤0.55 W。證實了控制判據的可行性,采用混合跟蹤可有效提升系統的發電功率。
后續可針對太陽能跟蹤系統電池板的溫度恒定展開研究,提高光伏電池發電效率。未來可將太陽能混合跟蹤系統應用于光伏屋頂、光伏幕墻與光伏遮陽板等光伏建筑上,不斷推動中國節能環保戰略。
[1] 孟醒. 太陽能利用的新方向[J]. 中國工業和信息化,2022(4):22-27.
MENG Xing. New direction of solar energy utilization [J]. China Industry and Informatization, 2022(4): 22-27. (in Chinese with English abstract)
[2] 王立舒,文競晨,王錦鋒,等. 基于微熱管陣列的太陽能溫差發電系統優化[J]. 農業工程學報,2019,35(22):251-256.
WANG Lishu, WEN Jingchen, WANG Jinfing, et al. Optimization of solar thermoelectric power generation components with micro heat pipe array[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(22): 251-256. (in Chinese with English abstract)
[3] 黃種明,許志龍,李煌. 光伏光熱一體機的雙光電跟蹤太陽控制器研制[J]. 農業工程學報,2021,37(8):236-241.
HUANG Zhongming, XU Zhilong, LI Huang. Development of double photoelectric solar tracking controller for photovoltaic solar thermal integrated machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(8): 236-241. (in Chinese with English abstract)
[4] SEME S, ?TUMBERGER B, HAD?ISELIMOVI? M, et al. Solar photovoltaic tracking systems for electricity generation: A review[J]. Energies, 2020, 13(16): 4224.
[5] 王林軍,門靜,許立曉,等. 基于環境因素與模糊識別的太陽自動跟蹤控制策略[J]. 農業工程學報,2015,31(9):195-200.
WANG Linjun, MEN Jing, XU Lixiao, et al. Solar auto-tracking control strategy based on environmental factors and fuzzy identification[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(9): 195-200. (in Chinese with English abstract)
[6] JAMROEN C, FONGKERD C, KRONGPHA W, et al. A novel UV sensor-based dual-axis solar tracking system: Implementation and performance analysis[J]. Applied Energy, 2021, 299: 117295.
[7] 郭會超,胡曉芳,黃家敏. 光伏發電系統智能檢測與自適應跟蹤技術的研究[J]. 內蒙古煤炭經濟,2021(16):39-40.
GUO Huichao, HU Xiaofang, HUANG Jiamin. Research on intelligent detection and adaptive tracking technology of photovoltaic power generation system[J]. Inner Mongolia Coal Economy, 2021(16): 39-40. (in Chinese with English abstract)
[8] 樊海紅,康天桂,張培珍,等. 太陽方位雙模式跟蹤系統的研究[J]. 現代電子技術,2020,43(16):51-55.
FAN Haihong, KANG Tiangui, ZHANG Peizhen, et al. Research on dual-mode tracking system of solar azimuth[J]. Modern Electronic Technology, 2020, 43(16): 51-55. (in Chinese with English abstract)
[9] ZSIBORáCS H, PINTéR G, VINCZE A, et al. A control process for active solar-tracking systems for photovoltaic technology and the circuit layout necessary for the implementation of the method[J]. Sensors, 2022, 22(7): 2564.
[10] 祁琛陽,王成龍,吳澤睿. 一種高精度太陽能跟蹤控制系統設計與實現[J]. 建模與仿真,2022,11(3):744-754.
QI Chenyang, WANG Chenglong, WU Zerui. Design and implementation of a high-precision solar tracking control system[J]. Modeling and Simulation, 2022, 11(3): 744-754. (in Chinese with English abstract)
[11] 李立鵬,高建,黃天怡,等. 基于多模式融合的雙自由度太陽能追蹤系統的研究與設計[J]. 天津科技,2019,46(4):57-59,63.
LI Lipeng, GAO Jian, HUANG Tianyi, et al. Research and design of a two-degree-of-freedom solar tracking system based on multi-mode fusion[J]. Tianjin Science and Technology, 2019, 46(4): 57-59, 63. (in Chinese with English abstract)
[12] 許迎東. 基于單片機控制的移動式光伏跟蹤系統研究與設計[D]. 保定:河北大學,2021.
XU Yingdong. Research and Design of Mobile Photovoltaic Tracking System Based on MCU Control[D]. Baoding: Hebei University, 2021. (in Chinese with English abstract)
[13] LI Q, LIU H D. Design of solar energy automatic tracking control system based on single chip microcomputer[J]. IOP Conference Series: Earth and Environmental Science, 2019(242): 022056.
[14] SAFAN Y M, SHAABAN S, EL-SEBAH M I A. Performance evaluation of a multi-degree of freedom hybrid controlled dual axis solar tracking system[J]. Solar Energy, 2018, 170: 576-585.
[15] 王林軍,門靜,張東,等. 太陽自動跟蹤系統中光電傳感器的設計[J]. 農業工程學報,2015,31(14):179-185.
WANG Linjun, MEN Jing, ZHANG Dong, et al. Research and design of mobile photovoltaic tracking system based on MCU[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 179-185. (in Chinese with English abstract)
[16] 吳碩,趙繼忠. 雙軸高精度太陽能自適應跟蹤系統研究與設計[J]. 電源技術,2022,46(3):335-339.
WU Shuo, ZHAO Jizhong. Research and design of dual-axis high-precision solar adaptive tracking system[J]. Chinese Journal of Power Technology, 2022, 46(3): 335-339. (in Chinese with English abstract)
[17] LI D H W, CHAU N T C, WAN K K W. Predicting daylight illuminance and solar irradiance on vertical surfaces based on classified standard skies[J]. Energy, 2013, 53: 252-258.
[18] 嚴曉瑜,楊苑媛,緱曉輝,等. 基于TUV模式的銀川光化輻射通量特征及其影響因子[J]. 氣象與環境學報,2022,38(3):127-136.
YAN Xiaoyu, YANG Yuanyuan, GOU Xiaohui, et al. Analysis of actinic flux and its influence factors in Yinchuan based on TUV model[J]. Journal of Meteorology and Environment, 2022, 38(3): 127-136. (in Chinese with English abstract)
[19] 姚宏民,杜欣慧,秦文萍. 基于密度峰值聚類及GRNN神經網絡的光伏發電功率預測方法[J]. 太陽能學報,2020,41(9):184-190.
YAO Hongmin, DU Xinhui, QIN Wenping. PV power forecasting approach based on density peak clustering and general regression neural network[J]. Acta Energiae Solaris Sinca, 2020, 41(9): 184-190. (in Chinese with English abstract)
[20] 程啟明,張強,程尹曼,等. 基于密度峰值層次聚類的短期光伏功率預測模型[J]. 高電壓技術,2017,43(4):1214-1222.
CHENG Qiming, ZHANG Qiang, CHENG Yinman, et al. Short-term photovoltaic power prediction model based on hierarchical clustering of density peaks algorithm[J]. High Voltage Technology, 2017, 43(4): 1214-1222. (in Chinese with English abstract)
[21] 寧宇,彭佑多,顏健. 三棱臺式太陽跟蹤光電傳感器及特性[J]. 傳感器與微系統,2018,37(12):13-16,20.
NING Yu, PENG Youduo, YAN Jian. Triangular solar tracking photoelectric sensor and its characteristics[J]. Transducer and Microsystem Technologies, 2018, 37(12): 13-16, 20. (in Chinese with English abstract)
[22] 王炳忠,湯杰. 幾種太陽位置計算方法的比較研究[J]. 太陽能學報,2001,22(4):413-417.
WANG Bingzhong, TANG Jie. Comparison of the different methods for solar position calculation[J]. Acta Energiae Solaris Sinca, 2001, 22(4): 413-417. (in Chinese with English abstract)
[23] 龔元霞,劉福華,許孝敏,等. 基于四象限的光斑位置探測系統設計[J]. 科學技術創新,2020(28):38-39.
GONG Yuanxia, LIU Fuhua, XU Xiaomin, et. al. Research on target tracking system based on four-quadrant photoelectric detection[J]. Science and Technology Innovation, 2020(28): 38-39 (in Chinese with English abstract)
[24] JEAN M. Astronomical Algorithms[M]. Inc Rich-mond, Virginia, USA, 1991: 151-154.
[25] 楊磊. 基于數字孿生的光伏跟蹤支架控制系統研究[D]. 哈爾濱:東北農業大學,2021.
YANG Lei. Research on Control System of Photovoltaic Tracking Bracket Based on Digital Twin[D]. Harbin: Northeast Agricultural University, 2021. (in Chinese with English abstract)
[26] 封居強,楊偉虎,韓芳. 基于四象限法則的高精度太陽能跟蹤系統設計[J]. 電源技術,2019,43(10):1718-1721.
FENG Juqiang, YANG Weihu, HAN Fang. Design of solar tracking system with high precision based on four-quadrant rule[J]. Chinese Journal of Power Sources, 2019, 43(10): 1718-1721. (in Chinese with English abstract)
[27] 陳舟. 太陽能雙軸自動跟蹤系統設計與研究[D]. 武漢:湖北工業大學,2015.
CHEN Zhou. Design and Research of Solar Biaxial Automatic Tracking System[D]. Wuhan: Hubei University of Technology, 2015. (in Chinese with English abstract)
[28] 韓夢佳,曲銘雯. 基于神經網絡的船舶傾覆預警系統[J]. 電子設計工程,2020,28(6):64-68.
HAN Mengjia, QU Mingwen. Pre?warning system for ship capsizing based on natural network [J]. Electronic Design Engineering, 2020, 28(6): 64-68. (in Chinese with English abstract)
[29] 王立舒,馮廣煥,張旭,等. 聚光太陽能光伏/溫差熱復合發電系統設計與性能測試[J]. 農業工程學報,2018,34(15):246-254.
WANG Lishu, FENG Guanghuan, ZHANG Xu, et al. Design and performance test of concentration solar PV/TE compound power generation system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(15): 246-254. (in Chinese with English abstract)
[30] 王立舒,黨舒俊,蘇繼恒,等. 熱開關控制光伏/溫差聯合發電裝置設計提高發電效率[J]. 農業工程學報,2018,34(14):196-204.
WANG Lishu, DANG Shujun, SU Jiheng, et al. Design of PV/TE hybrid power generation device based on thermal switch and its improving efficiency of power generation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 196-204. (in Chinese with English abstract)
[31] KANT K, SHUKLA A, SHARMA A, et al. Thermal response of poly-crystalline silicon photovoltaic panels: Numerical simulation and experimental study[J]. Solar Energy, 2016, 134: 147-155.
[32] 韓喜蓮,朱垚宇. 相變儲能型太陽能真空集熱管運行特性研究[J]. 蘭州理工大學學報,2022,48(2):123-130.
HAN Xilian, ZHU Yaoyu. Study on the operational characteristics of phase change energy storage solar vacuum collector[J]. Journal of Lanzhou University of Technology, 2022, 48(2): 123-130. (in Chinese with English abstract)
[33] 姚萬祥,李崢嶸,李翠,等. 各種天氣狀況下太陽輻射照度與太陽光照度關系[J]. 同濟大學學報(自然科學版),2013,41(5):784-787.
YAO Wanxiang, LI Zhengrong, LI Cui, et al. Relationship between bolar radiance and solar illuminance under all sky types[J]. Journal of Tongji University (Natural Science Edition), 2013, 41(5): 784-787. (in Chinese with English abstract)
[34] 鄭丹,馬尚昌,張素娟. 一種基于MEA-BP的太陽輻射反演算法[J]. 氣象科技,2018,46(5):860-867.
ZHENG Dan, MA Shangchang, ZHANG Sujuan. Solar radiation inversion algorithm based on MEA-BP[J]. Meteorological Science and Technology, 2018, 46(5): 860-867. (in Chinese with English abstract)
[35] 唐國棟,蒙仲舉,高永,等. 沙區光伏陣列對近地層風沙輸移的干擾效應[J]. 農業工程學報,2021,37(13):101-110.
TANG Guodong, MENG Zhongju, GAO Yong, et al. Interference effect of solar photovoltaic array on near surface aeolian sand transport in sandy areas[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(13): 101-110. (in Chinese with English abstract)
[36] 朱賓賓,孫雙紅,李艷紅,等. 呼倫貝爾沙地紫外輻射和太陽總輻射特征[J]. 中國沙漠,2021,41(1):111-118.
ZHU Binbin, SUN Shuanghong, LI Yanhong, et al. Characteristics of ultraviolet radiation and global radiation in alpine desert): A case of Hulun Buir Sandy Land[J]. Journal of Desert Research, 2021, 41(1): 111-118. (in Chinese with English abstract)
Solar hybrid tracking system under complex weather conditions and control criterion
WANG Lishu1, CHEN Xi1, FANG Junlong1※, XIA Haonan1, LIU Qi1, LI Xinran1, BAI Long1,2
(1.,,150030,;2,,157011,)
Solar tracking technology has been widely used in large power stations, photovoltaic agriculture, and green building industry. Among them, hybrid tracking can be expected to consider both photoelectric and solar trajectory tracking. However, it is still lacking in the accurate evaluation of different weather conditions, due to the excessively broad control criterion in the solar hybrid tracking using light intensity, and the vague conditions for the weather identification. In this research, a solar hybrid tracking system was designed under complex weather conditions. Moreover, a multi-threshold control criterion was proposed to divide the weather conditions. The tracking characteristics of the system were analyzed under different tracking strategies in the concentrated and non-concentrated environments, combined with the weather conditions.The control criterion was classified into irradiance fluctuation, high irradiance, low and extremely low irradiance weather. As such, the photoelectric and solar trajectory tracking automatically adjusted, or fixed the inclination angle, according to the external weather changes. Firstly, the prototype of a hybrid tracking system was developed for solar power generation. Specifically, the Raspberry Pi 4B controlled by Node-Red was used as the control core, and the signal was divided by the analog switch of CD4052. At the same time, the photoelectric tracking signal and the fixed inclination angle placement signal were outputted by Arduino, whereas, the tracking signal of the solar trajectory was outputted by STM32F407.Three-way parallel control was adopted to avoid interference with each other in the different control strategies. Secondly, a series of tracking tests were carried out to determine the foundation for the switching of the tracking system under concentrated and non-concentrated light conditions. The switching criteria were summarized for the hybrid tracking system since the tracking performance of the system varied depending on the weather and the tracking mode. The irradiance and power generation curves were also determined that the system received under various tracking strategies. A hybrid tracking scheme was developed to investigate the influence of weather on irradiance characteristics, in order to keep tracking the temperature change of battery panels. The irradiance and temperature curves demonstrated that the irradiance was the primary determinant of the variance in PV cell output, while the temperature remained constant. As a result, the hybrid tracking system can be expected to track the high irradiance for higher power production. Finally, the tracking prototype was tested to verify the impact of the criterion program on the hybrid tracking system. The test results showed that the average power generation of a no-concentrated hybrid tracking system on a sunny day was 0.03 and 0.16 W higher than that of photoelectric and solar trajectory tracking. Additionally, the average power generation of the concentrated hybrid tracking system on a sunny day was 0.81, which was 0.03 and 0.55 W higher than that of photoelectric and solar trajectory tracking. Anyway, the experiment verified the feasibility of the developed device. The new criterion can also provide a promising idea for hybrid tracking technology under complex weather.
solar energy; irradiance; test; hybrid tracking; power generation; criterion
10.11975/j.issn.1002-6819.202211251
TM913
A
1002-6819(2023)-05-0156-10
王立舒,陳曦,房俊龍,等. 復雜天氣狀況下的太陽能混合跟蹤系統及控制判據[J]. 農業工程學報,2023,39(5):156-165.doi:10.11975/j.issn.1002-6819.202211251 http://www.tcsae.org
WANG Lishu, CHEN Xi, FANG Junlong, et al. Solar hybrid tracking system under complex weather conditions and control criterion[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(5): 156-165. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202211251 http://www.tcsae.org
2022-11-30
2023-02-21
黑龍江省教育廳科技課題(12521038);黑龍江省教育廳基本科研業務費支持項目(1452MSYYB009);牡丹江師范學院青年學術骨干項目(GG2018004)
王立舒,博士,教授,博導。研究方向為農業電氣化與自動化;電力新能源開發與利用。Email:wanglishu@neau.edu.cn
房俊龍,博士,教授,博導。研究方向為電力系統自動化、信息處理與智能測控。Email:junlongfang@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32