基于激光感知的農業機器人定位系統
2023-05-15 03:30:16王志敏焦晉康王晨陽李明錦
農業工程學報 2023年5期
關鍵詞:農業
胡 煉,王志敏,汪 沛,何 杰,焦晉康,王晨陽,李明錦
·農業裝備工程與機械化·
基于激光感知的農業機器人定位系統
胡 煉1,2,王志敏1,汪 沛1,2※,何 杰1,2,焦晉康1,王晨陽1,李明錦1
(1. 華南農業大學南方農業機械與裝備關鍵技術教育部重點實驗室,廣州 510642; 2.嶺南現代農業科學與技術廣東省實驗室茂名分中心,茂名 525000)
為解決基于全球導航衛星系統(global navigation satellite system,GNSS)的農業機器人和自動駕駛農機在機庫、大棚等衛星信號弱或無環境下定位精度低甚至無法定位的問題,該研究提出了基于激光感知的農業機器人定位方法。采用二維激光雷達和激光接收器設計了基于激光感知的機器人定位系統,通過二維激光雷達發射掃描激光獲取機器人上激光接收器的點云,同時激光接收器感應掃描激光,融合感應掃描激光時間差和激光接收器點云特征,得到移動激光接收器(即農業機器人)的定位。以全站儀測量為參照在大棚內開展驗證試驗,結果表明,在激光雷達掃描范圍內,機器人行駛速度為0.8 m/s時,直線行駛時最大偏差絕對平均值為4.1 cm,最大均方根誤差為1.5 cm;曲線行駛時最大偏差絕對平均值為6.2 cm,最大均方根誤差為2.6 cm,滿足農業機器人在農機庫等環境中自動導航所需定位精度要求。
機器人;激光雷達;激光傳感;定位;智能農機裝備
0 引 言
農業機器人通常應用于結構化場景與隨機的不確定場景,且作業任務日益復雜[1],定位和導航是農業機器人的關鍵技術[2]。當前農機自動駕駛技術和農機輔助導航技術快速發展[3-7],通過物聯網、大數據和人工智能等先進信息技術的聯合使用,農機自動駕駛和輔助導航技術已在無人化智慧農場開始實踐應用[8]。
全球導航衛星系統(global navigation satellite system,GNSS)作為農業機械智能化技術中的一項關鍵技術,近年來已被廣泛應用于農業生產各環節,其定位精度達到厘米級[9],基于GNSS的農業機械導航系統旱地作業直線路徑跟蹤精度優于±2.5 cm[4],水田作業直線路徑跟蹤橫向偏差平均值為4.3 cm[10]。因此,智能農機依靠GNSS定位實現了大田高精度智能化無人作業[11],但在農機機庫、農機轉移行駛過程中經過樹冠下和高架橋橋底以及溫室大棚設施等場景時,存在GNSS衛星信號差或丟失的問題,難以實現導航定位,因此亟需其他定位方法融合補充。
Wi-fi、Zigbee、藍牙和超寬帶等無線通信技術[12]以及即時定位與地圖構建(simultaneous localization and mapping,SLAM)技術是常用定位方法。無線通信技術中Wi-fi、超寬帶信號定位易受環境因素干擾[12-13],Zigbee和藍牙定位需要鋪設大量設備[14]。SLAM指在沒有環境先驗信息下,通過使用各種傳感器采集環境信息,在運動過程中構建環境地圖,并估計機器人位置[15],目前,已經有許多解決SLAM問題的數學模型與理論基礎[16]。SLAM技術包括視覺SLAM和激光SLAM,可以提供載體的相對位置信息,定位精度較高,已在物流、工業、醫療、安防、服務和農業等移動機器人以及無人駕駛領域廣泛應用[17-21]。在農業機器人出庫入庫時,因庫內外光照強度差異大,易導致視覺SLAM定位誤差增大甚至無法定位,而且圖像處理的運算量大、實時性較差[2,22]。此外,當環境中有較多移動物體時,視覺SLAM的環境地圖構建偏差增大,定位精度降低[23]。相比之下,激光SLAM技術較成熟、定位誤差更小[24],但激光SLAM構建的地圖缺乏語義信息[25],對于大場景非固定地圖仍需進一步研究[26],激光SLAM的地圖構建可使用二維激光雷達和三維激光雷達,目前在物流和工業等領域主要使用成本較高的三維激光雷達[27]。
在無人化農場作業中,若每臺無人駕駛農機均配備一套激光SLAM系統和高性能運算處理器實現小范圍衛星信號被遮擋區域內的無人駕駛農機定位,不僅不能充分利用激光SLAM系統性能,而且增加了成本。因此,在保持現有農機無人駕駛系統定位解算算法等前提下,研究能夠和GNSS系統融合補充的定位系統來解決無人駕駛農機出入庫衛星信號弱或無的問題,對無人化農場的研究與建設具有重要意義。故本文設計了基于二維激光感知的農業機器人定位系統,并進行定位試驗驗證其定位精度。
1 基于激光感知的農業機器人定位方法
1.1 基于激光感知的農業機器人定位原理
基于激光感知的農業機器人定位系統由移動激光接收器、處理器、固定激光接收器和二維激光雷達組成,如圖1所示,移動激光接收器和處理器安裝在機器人上,固定激光接收器和二維激光雷達固定在已知大地坐標位置,根據大地坐標點及激光雷達坐標系與大地坐標系的位置關系,基于激光感知的定位算法計算得到機器人的大地坐標,因此現有農機無人駕駛系統的定位解算和控制算法均無需修改即可實現無GNSS信號時實現定位和導航,例如,機器人出庫時,在既有基于激光感知的機器人定位系統定位信號又有GNSS信號的區域切換GNSS定位系統進行導航,而入庫時,在該區域切換采用基于激光感知的機器人定位系統進行導航。

圖1 基于激光感知的農業機器人定位原理示意圖
1.2 基于激光感知的農業機器人定位算法
激光雷達以一定周期掃描獲得數量已知且排序固定的點云數據,固定激光接收器感應激光雷達周期性照射產生固定激光信號,且固定激光接收器位置已知,機器人運動過程中移動激光接收器感應激光雷達周期性照射產生移動激光信號,在一個掃描周期中,根據固定激光信號與移動激光信號得到兩者的觸發時間差,由此獲得照射到移動激光接收器的激光射線與照射到固定激光接收器的激光射線夾角Δ,以此快速準確找到移動激光接收器在激光雷達點云中的散點集,結合點云特征匹配算法獲得移動激光接收器中心坐標,最后通過坐標轉換得到移動激光接收器中心在大地坐標系中的位置,即農業機器人在大地坐標系中的位置。
在激光雷達掃描平面建立以激光雷達為圓心的極坐標系和直角坐標系,極坐標系中任意點(,),其直角坐標系為(,),坐標轉換關系如下:

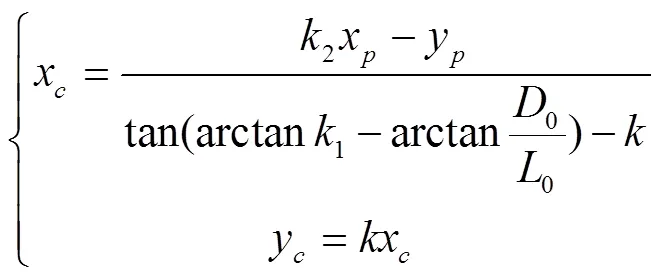
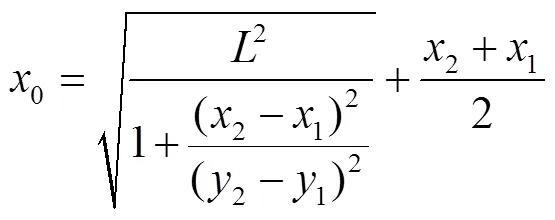
由激光接收器光電轉換模塊中心坐標推算出移動激光接收器中心坐標,再轉換至大地坐標系下移動激光接收器中心坐標,即定位坐標。
注:為接收器外殼長邊長度,cm;為接收器外殼短邊長度,cm;0為接收器感光模塊距外殼短邊距離,cm;0為接收器感光模塊距外殼長邊距離,cm;為接收器感光模塊與坐標原點連線;1為擬合出的接收器外殼長邊所在直線;3為擬合出的接收器外殼短邊所在直線,點為直線1和直線3的交點;2為接收器感光模塊與點連線;、1、2和3分別為直線1、2和3的斜率;1、2和3分別為直線1、2和3的截距。l為離光電轉換模塊中心最近的激光雷達掃描射線,θ為激光雷達射線l掃描線對應極坐標的角度值。
Note:is the length of the long side of the mobile laser receiver housing, cm;is the length of the short side of the mobile laser receiver housing, cm;0is the distance from the photosensitive module of the mobile laser receiver to the short side of the housing, cm;0is the distance from the photosensitive module of the mobile laser receiver to the long side of the housing, cm; theis the connection line between the receiver photosensitive module and the coordinate origin, the1is the fitting line of the receiver housing on long side , pointis the intersection of line1and line3,2is the connection line between the photosensitive module of the mobile laser receiver and point, the3is the fitting line of the receiver housing on short side,,1,2and3is the slope of the straight line,1,2and3, respectively;1is the intercept of the straight line1,1is the intercept of the straight line2,3is the intercept of the straight line3, thelis the closest laser radar scanning ray to the center of the photoelectric conversion module,θis the angle value of the polar coordinate corresponding to the scanning line of the laser radar rayl.
圖2 激光接收器光電轉換模塊中心坐標幾何關系示意圖
Fig.2 Schematic diagram of the central coordinate geometric relationship of the photoelectric conversion module of the laser receiver
2 基于激光感知的農業機器人定位系統試驗
2.1 系統介紹
基于激光感知的農業機器人定位(ARPLS)系統如圖3所示,以東風井關T954拖拉機為試驗平臺。ARPLS系統硬件部分主要由移動端和固定端組成,移動端包括移動激光接收器,固定端包括激光雷達和固定激光接收器。激光接收器通過濾光模塊、光電轉換模塊、信號調制模塊將激光雷達發射的光信號轉換成電信號[28],數據處理與通信傳輸模塊將激光感應信號通過CAN總線進行傳輸,激光接收器外殼長邊11 cm,短邊6.5 cm。移動激光接收器安裝在拖拉機頂部機體(沿機頭方向)中心線上,離地高度3 m,激光雷達和固定接收器固定在華南農業大學增城教學科研基地農機庫支撐柱上,且移動激光接收器和固定激光接收器均能夠接收到激光雷達發射的激光射線。移動激光接收器和固定激光接收器的CAN總線通過PCAN-USB傳輸到處理器,PCAN-USB用于監聽CAN 網絡消息,時間戳的分辨率為42 μs。激光雷達的測量距離為40~20 000 mm,掃描范圍為270°,角度分辨率為0.117 2°,掃描頻率為10 Hz,誤差為測量距離的1%。
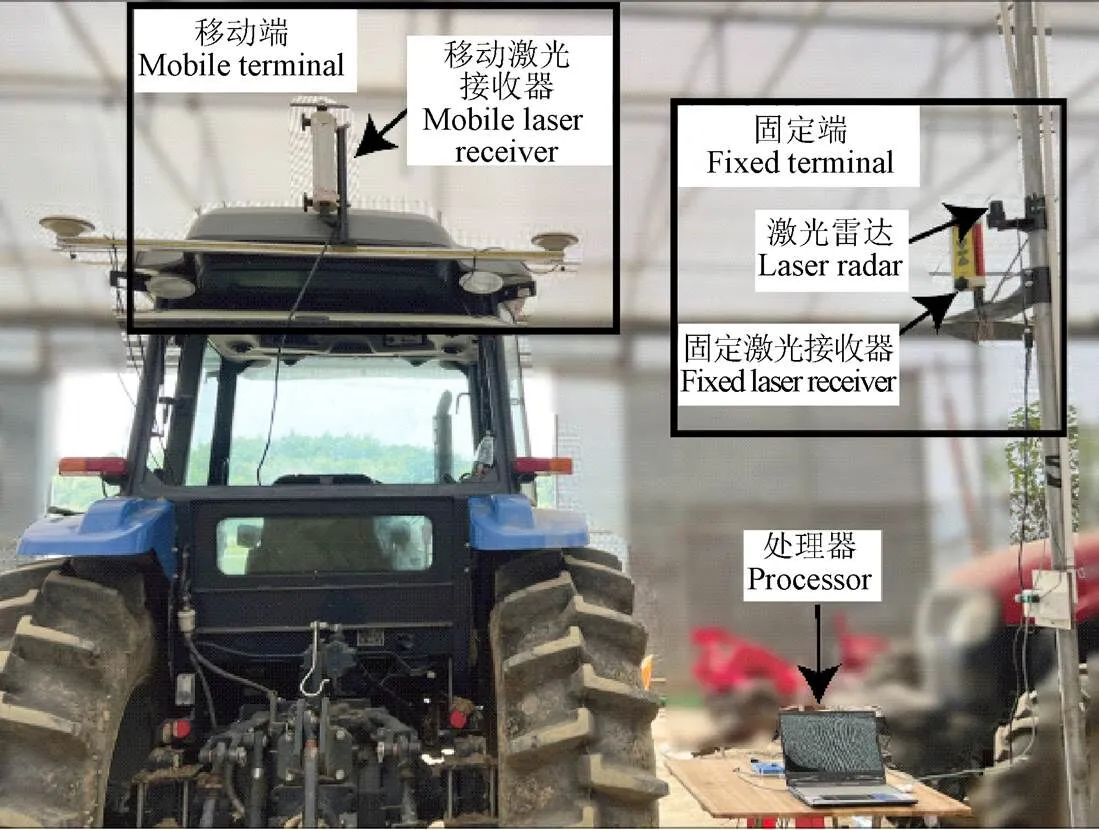
圖3 安裝在拖拉機上的基于激光感知的農業機器人定位系統
使用Visual studio 2022通過C#編程語言編寫系統軟件,采用多線程數據事件觸發的方式進行數據處理與分析,得到準確的激光雷達、移動激光接收器和固定激光接收器的數據響應時間戳,固定端數據發送到移動端進行分析處理,從而實時獲得定位數據。
試驗以全站儀和RTK GNSS系統的測量軌跡作為參考對象,且均采用WGS-84坐標系。全站儀自動跟蹤安裝在移動激光接收器上的棱鏡,進行動態跟蹤測量,全站儀為Leica Ms60,測量頻率10 Hz,100 m范圍內測量誤差1 mm;RTK GNSS系統直接測量獲取拖拉機定位,RTK GNSS板卡為K728,測量頻率10 Hz,平面定位精度1 cm。
試驗時拖拉機在激光雷達掃描范圍內以0.3、0.5和0.8 m/s分別進行往復的直線運動和曲線運動,行駛距離9~20 m,每組試驗重復5次,ARPLS系統、全站儀和GNSS三套定位系統同時采集定位數據,采集時長3~5 min,其中激光感知定位系統每次試驗獲得定位點2 000個以上。
2.2 坐標系轉換與機器人中心定位






3 結果與分析
ARPLS系統、全站儀和GNSS測量的一組拖拉機以0.8 m/s速度直線行駛和曲線行駛的軌跡分別如圖4和圖5所示,其中直線行駛距離10 m、曲線行駛距離12 m。由圖可知,ARPLS系統測量的拖拉機軌跡與全站儀和GNSS測量的軌跡基本重合,表明在試驗行駛距離范圍內,ARPLS系統提供了試驗拖拉機在WGS-84坐標系下的定位。
ARPLS系統動態測量拖拉機以0.8 m/s速度進行直線行駛和曲線行駛定位與全站儀測量定位的偏差絕對值曲線分別如圖6和圖7所示。在相同速度下,直線行駛定位的偏差絕對值明顯小于曲線行駛定位的偏差絕對值,因此,ARPLS系統動態測量直線運動定位精度高于曲線運動定位精度,測量直線運動定位偏差不大于7 cm,測量曲線運動定位偏差小于12 cm。
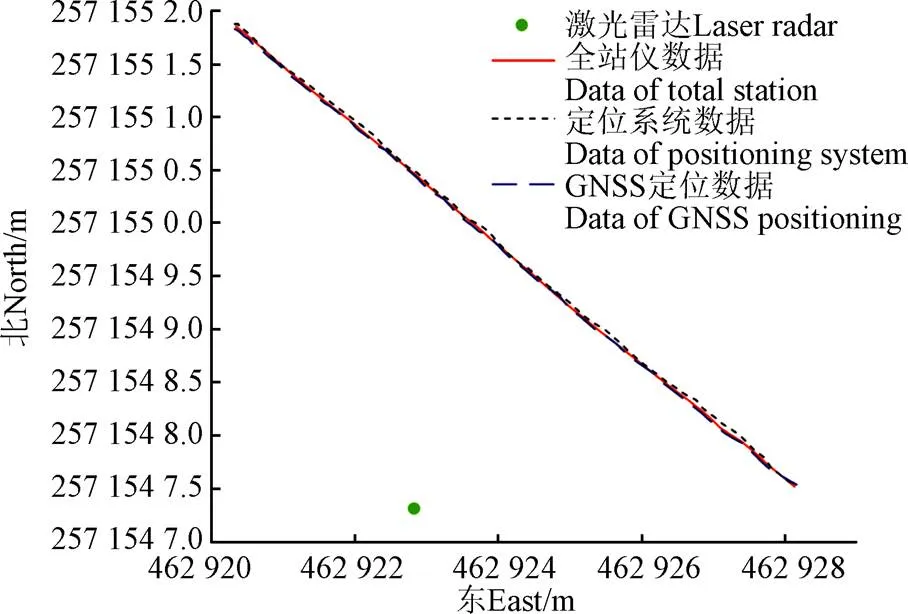
圖4 拖拉機直線行駛軌跡
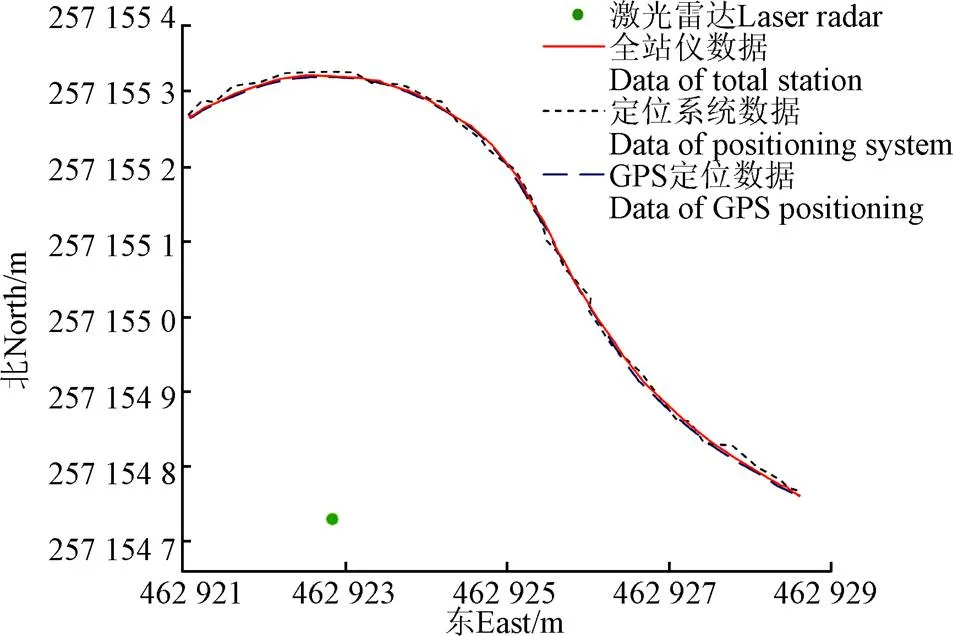
圖5 拖拉機曲線行駛軌跡
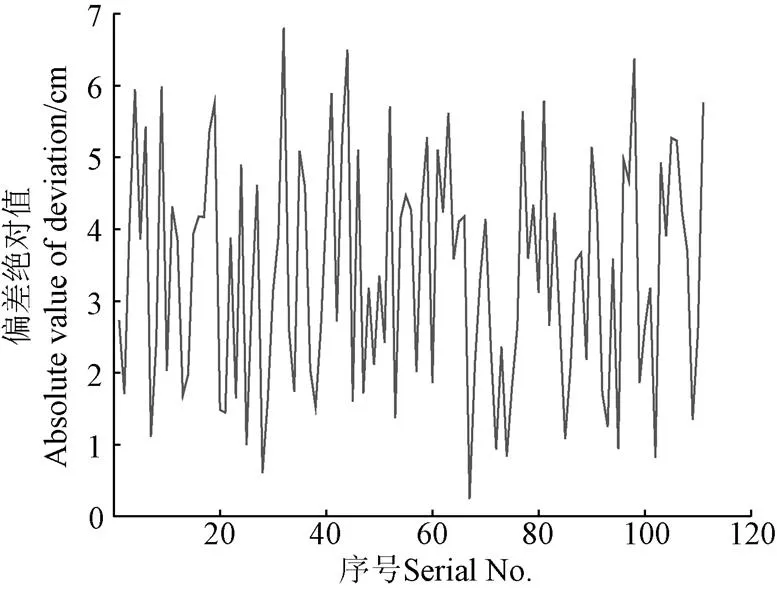
圖6 直線行駛的定位偏差絕對值曲線
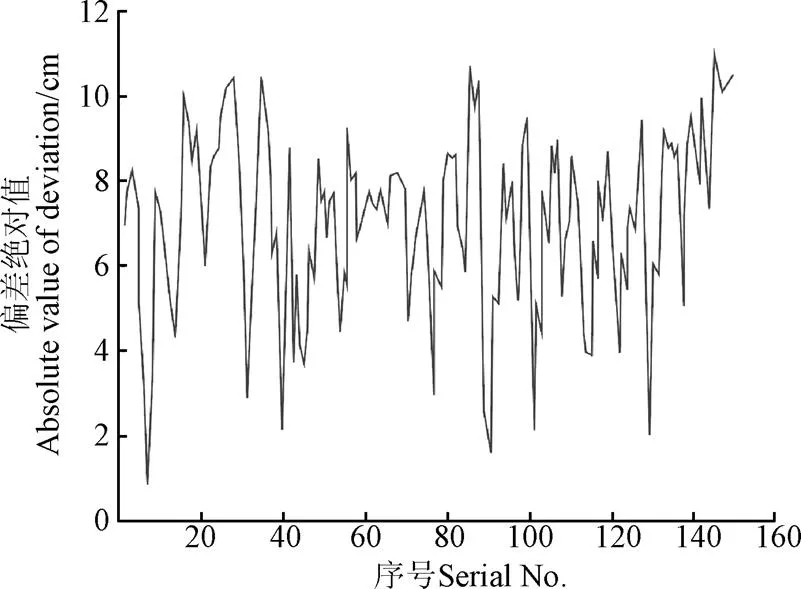
圖7 曲線行駛的定位偏差絕對值曲線
以全站儀測量定位為真值,各試驗組次ARPLS系統相對全站儀測量定位的偏差絕對平均值和均方根誤差如表1所示。表中試驗數據表明,隨著拖拉機速度越快,ARPLS系統定位相對全站儀定位的誤差隨之增大;行駛速度相同時,曲線行駛比直線行駛定位的誤差大。0.8 m/s速度時,直線行駛時最大偏差絕對平均值為4.1 cm,最大均方根誤差為1.5 cm;曲線行駛時最大偏差絕對平均值為6.2 cm,最大均方根誤差為2.6 cm。
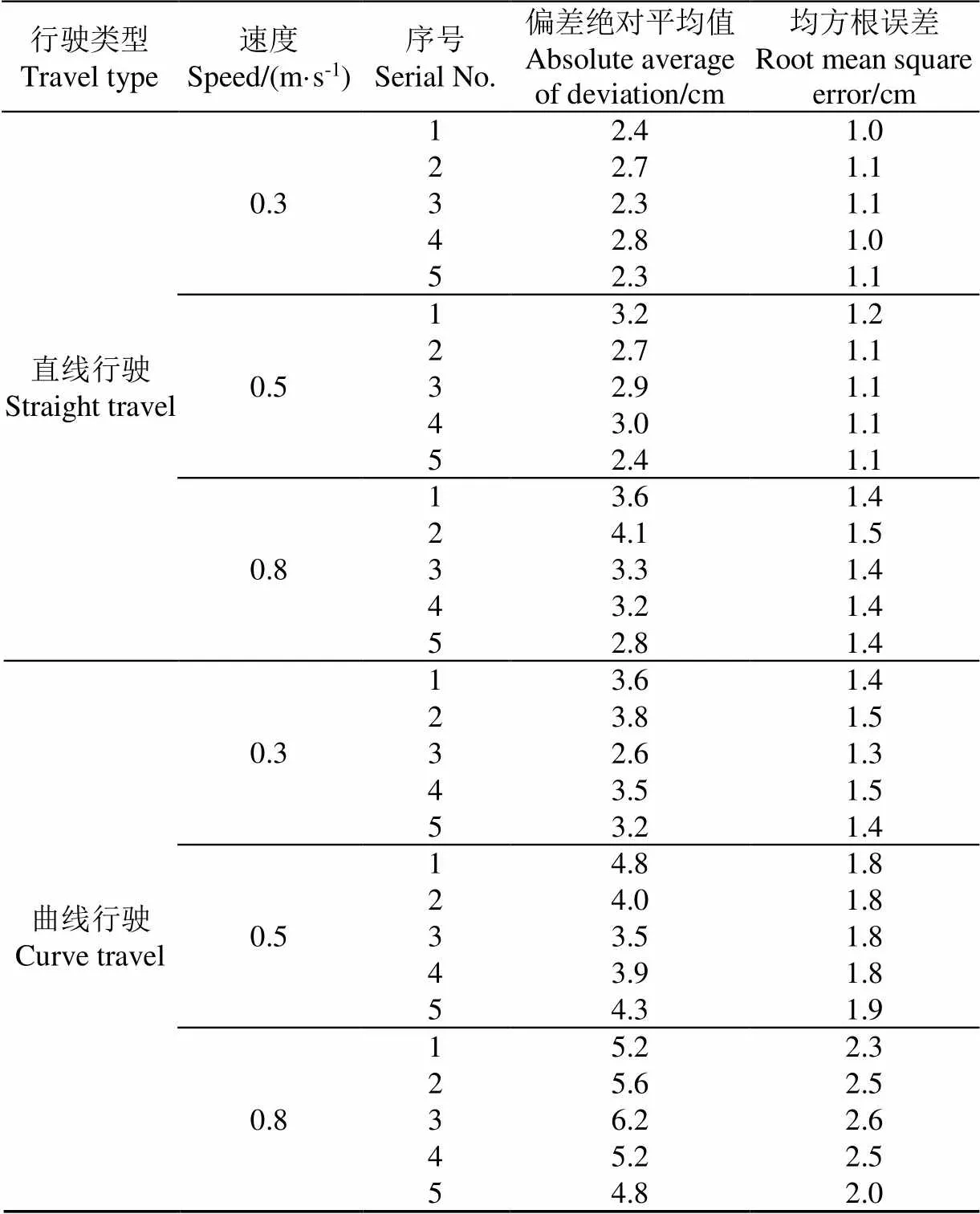
表1 激光感知定位相比全站儀定位誤差
ARPLS系統的誤差主要源于移動激光接收器和固定激光接收器感知激光的時間差誤差以及點云擬合誤差。隨著拖拉機速度增加而定位誤差增大是由于激光雷達需要完成一圈掃描才能輸出點云數據,導致定位系統數據輸出與測量時刻存在延時。曲線行駛定位誤差比直線行駛定位誤差大主要是因為曲線運動導致激光接收器長方形外殼的長邊或短邊點云數量少甚至沒有,從而降低了算法推算精度。
4 結 論
1)本文提出了基于激光感知的農業機器人定位方法,利用激光感知和激光雷達點云特征得到移動激光接收器相對固定激光雷達的位置,通過坐標轉換獲得機器人的實時大地定位坐標。
2)基于激光感知的定位算法解決了難以從二維激光雷達點云中確定目標對象點云的問題,通過固定激光信號與移動激光信號觸發時間差快速準確找到移動激光接收器在激光雷達點云中的散點集,結合點云特征匹配算法實現了快速準確地獲得目標對象定位。
3)設計了基于激光感知的農業機器人定位系統,大棚內試驗結果表明,在激光雷達掃描范圍內,機器人行駛速度為0.8 m/s時,直線行駛時最大偏差絕對平均值為4.1 cm,最大均方根誤差為1.5 cm;曲線行駛時最大偏差絕對平均值為6.2 cm,最大均方根誤差為2.6 cm。
移動接收器外形以及激光雷達掃描外殼獲得的點云數量直接影響基于激光感知的農業機器人定位系統的定位精度,因此后續將從大尺寸圓形外殼激光接收器設計、高頻率點云激光雷達選用以及與慣性傳感器融合算法等方面開展研究,進一步提高定位精度和環境適應能力。
[1] 宮金良,王偉,張彥斐,等. 基于農田環境的農業機器人群協同作業策略[J]. 農業工程學報,2021,37(2):11-19.
GONG Jinliang, WANG Wei, ZHANG Yanfei, et al. Cooperative working strategy for agricultural robot groups based on farmland environment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(2): 11-19. (in Chinese with English abstract)
[2] 陳瑜,張鐵民,孫道宗,等. 基于無線傳感器網絡的設施農業車輛定位系統設計與試驗[J]. 農業工程學報,2015,31(10):190-197.
CHEN Yu, ZHANG Tiemin, SUN Daozong, et al. Design and experiment of locating system for facilities agricultural vehicle based on wireless sensor network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 190-197. (in Chinese with English abstract)
[3] 何杰,朱金光,張智剛,等. 水稻插秧機自動作業系統設計與試驗[J]. 農業機械學報,2019,50(3):17-24.
HE Jie, ZHU Jinguang, ZHANG Zhigang, et al. Design and experiment of automatic operation systemfor rice transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(3): 17-24. (in Chinese with English abstract)
[4] 何杰,高維煒,王輝,等. 基于MEMS陀螺儀的農機轉向輪角測量方法[J]. 中國農機化學報,2020,41(4):123-129.
HE Jie, GAO Weiwei, WANG Hui, et al. Steering wheel angle measurement method of agricultural machinery based on dual MEMS gyroscope[J]. Journal of Chinese Agricultural Mechanization, 2020, 41(4): 123-129. (in Chinese with English abstract)
[5] 張雁,李彥明,劉翔鵬,等. 水田環境下水稻直播機自動駕駛控制方法[J]. 農業機械學報,2018,49(11):15-22.
ZHANG Yan, LI Yanming, LIU Xiangpeng, et al. An automatic drive control technique for rice drill seeder in uneven paddy fields[J]. Transactions of the Chinese Society for Agricultural Machinery, 49(11): 15-22. (in Chinese with English abstract)
[6] 鐘銀,薛夢琦,袁洪良. 智能農機GNSS/INS組合導航系統設計[J]. 農業工程學報,2021,37(9):40-46.
ZHONG Yin, XUE Mengqi, YUAN Hongliang. Design of the GNSS/INS integrated navigation system for intelligent agricultural machinery[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 40-46. (in Chinese with English abstract)
[7] 潘新宇,趙英策,李建勛. GNSS/INS組合導航的隨機時延卡爾曼濾波[J]. 指揮控制與仿真,2022,44(1):26-31.
PAN Xinyu, ZHAO Yingce, LI Jianxun. Random Delay Kalman Filtering of GNSS/INS integrated navigation[J]. Command Control & Simulation, 2022, 44(1): 26-31. (in Chinese with English abstract)
[8] 李道亮,李震. 無人農場系統分析與發展展望[J]. 農業機械學報,2020,51(7):1-12.
LI Daoliang, LI Zhen. System analysis and development prospect of unmanned farming[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(7): 1-12. (in Chinese with English abstract)
[9] 劉兆朋,張智剛,羅錫文,等. 雷沃ZP9500高地隙噴霧機的GNSS自動導航作業系統設計[J]. 農業工程學報,2018,34(1):15-21.
LIU Zhaopeng, ZHANG Zhigang, LUO Xiwen, et al. Design of automatic navigation operation system for Lovol ZP9500 high clearance boom sprayer based on GNSS[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(1): 15-21. (in Chinese with English abstract)
[10] 張宜寶,孫經緯,石紹軍,等. 自動駕駛插秧機控制系統的設計與試驗[J]. 農機化研究,2023,45(7):71-78.
ZHANG Yibao, SUN Jingwei, SHI Shaojun, et al. Design and experiment of control system for automatic driving transplanter[J]. Journal of Agricultural Mechanization Research, 2023, 45(7): 71-78. (in Chinese with English abstract)
[11] 羅錫文,廖娟,胡煉,等. 我國智能農機的研究進展與無人農場的實踐[J]. 華南農業大學學報,2021,42(6):8-17.
LUO Xiwen, LIAO Juan, HU Lian, et al. Research progress of intelligent agricultural machinery and practice of unmanned farm in China[J]. Journal of South China Agricultural University, 2021, 42(6): 8-17. (in Chinese with English abstract)
[12] 陳沛宇,袁勤政,戴鵬飛,等. 多技術融合的室內無線定位方法發展綜述[J]. 導航定位學報,2022,10(3):9-13.
CHEN Peiyu, YUAN Qinzheng, DAI Pengfei, et al. Overview of the development of indoor wireless positioning methods based onmulti-technology integration[J]. Journal of Navigation and Positioning, 2022, 10(3): 9-13. (in Chinese with English abstract)
[13] 閆大禹,宋偉,王旭丹,等. 國內室內定位技術發展現狀綜述[J]. 導航定位學報,2019,7(4):5-12.
YAN Dayu, SONG Wei, WANG Xudan, et al. Review of development status of indoor location technology in China[J]. Journal of Navigation and Positioning, 2019, 7(4): 5-12. (in Chinese with English abstract)
[14] 姚立健,Santosh K Pitla,楊自棟,等. 基于超寬帶無線定位的農業設施內移動平臺路徑跟蹤研究[J]. 農業工程學報,2019,35(2):17-24.
YAO Lijian, Santosh K Pitla, YANG Zidong, et al. Path tracking of mobile platform in agricultural facilities based on ultra wideband wireless positioning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(2): 17-24. (in Chinese with English abstract)
[15] DONG F C, IENG S H, SAVATIER X, et al. Plenoptic cameras in real-time robotics[J]. International Journal of Robotics Research, 2013, 32(2): 206-217.
[16] GUALTIERI M, PLATT R. Robotic pick-and-place with uncertain object instance segmentation and shape completion[J]. IEEE Robotics and Automation Letters, 2021, 6(2): 1753-1760.
[17] KIM A, EUSTICE R M. Real-time visual SLAM for autonomous underwater hull inspection using visual saliency[J]. IEEE Transactions on Robotics, 2013, 29(3): 719-733.
[18] LU T T, YEH S C, CHEN C Y. A study of indoor positioning systems using iBeacons with different transmission power levels[J]. Journal of the Chinese Institute of Engineers, 2017, 40(6): 525-535.
[19] 王世峰,戴祥,徐寧,等. 無人駕駛汽車環境感知技術綜述[J]. 長春理工大學學報(自然科學版),2017,40(1):1-6.
WANG Shifeng, DAI Xiang, XU Ning, et al. Overview on environment perception technology for unmanned ground vehicle[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2017, 40(1): 1-6. (in Chinese with English abstract)
[20] 胡廣銳,孔微雨,齊闖,等. 果園環境下移動采摘機器人導航路徑優化[J]. 農業工程學報,2021,37(9):175-184.
HU Guangrui, KONG Weiyu, QI Chuang, et al. Optimization of the navigation path for a mobile harvesting robot in orchard environment[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 175-184. (in Chinese with English abstract)
[21] 楊繼之,樂毅,張加波,等. 移動機器人定位精度實時補償策略研究[J]. 機械工程學報,2022,58(14):44-53.
YANG Jizhi, LE Yi, ZHANG Jiabo, et al. Real-time compensation strategy of mobile robot positioning accuracy[J]. Journal of Mechanical Engineering, 2022, 58(14): 44-53. (in Chinese with English abstract)
[22] 陳艷,張漫,馬文強,等. 基于GPS和機器視覺的組合導航定位方法[J]. 農業工程學報,2011,27(3):126-130.
CHEN Yan, ZHANG Man, MA Wenqiang, et al. Positioning method of integrated navigation based on GPS and machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 126-130. (in Chinese with English abstract)
[23] 王柯賽,姚錫凡,黃宇,等. 動態環境下的視覺SLAM研究評述[J]. 機器人,2021,43(6):715-732.
WANG Kesai, YAO Xifan, HUANG Yu, et al. Review of visual SLAM in dynamic environment[J]. Robot, 2021, 43(6): 715-732. (in Chinese with English abstract)
[24] 李晨陽,彭程,張振乾,等. 融合里程計信息的農業機器人定位與地圖構建方法[J]. 農業工程學報,2021,37(21):16-23.
LI Chenyang, PENG Cheng, ZHANG Zhenqian, et al. Positioning and map construction for agricultural robots integrating odometer information[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(21): 16-23. (in Chinese with English abstract)
[25] 劉凌云,蔡成林,吳芊. 室外光照易變場景下的回環檢測方法[J]. 傳感器與微系統,2022,41(4):121-124.
LIU Lingyun, CAI Chenglin, WU Qian. Loop closure detection method in outdoor scene with variable illumination[J]. Transducer and Microsystem Technologies, 2022, 41(4): 121-124. (in Chinese with English abstract)
[26] 孫曼暉,楊紹武,易曉東,等. 基于GIS和SLAM的機器人大范圍環境自主導航[J]. 儀器儀表學報,2017,38(3):586-592.
SUN Manhui, YANG Shaowu, YI Xiaodong, et al. Autonomous navigation of robot in large-scale environments based on GIS and SLAM[J]. Chinese Journal of Scientific Instrument, 2017, 38(3): 586-592. (in Chinese with English abstract)
[27] 單吉超,李秀智,張祥銀,等. 室內場景下實時地三維語義地圖構建[J]. 儀器儀表學報,2019,40(5):240-248.
SHAN Jichao, LI Xiuzhi, ZHANG Xiangyin, et al. Real-time 3D semantic map building in indoor scene[J]. Chinese Journal of Scientific Instrument, 2019, 40(5): 240-248. (in Chinese with English abstract)
[28] ZANG Y, MENG S, HU L, et al. Optimization design and experimental testing of a laser receiver for use in a laser levelling control system[J]. Electronics, 2020, 9(3): 536. (in Chinese with English abstract)
Agricultural robot positioning system based on laser sensing
HU Lian1,2, WANG Zhimin1, WANG Pei1,2※, HE Jie1,2, JIAO Jinkang1, WANG Chenyang1, LI Mingjin1
(1.,,,510642,; 2.,,525000,)
In order to solve the positioning problem of global navigation satellite system (GNSS) based robots and autonomous agricultural machinery, which is low accuracy or even unable to locate under the environment of weak or no satellite signals such as hangars and greenhouses. This research proposes an agricultural robot positioning system based on laser sensing. The system is designed by using two-dimensional laser scanner and laser receiver, which obtains the point cloud of the laser receiver on the robot through the scanning laser emitted by the two-dimensional laser scanner , and the laser receiver inductively scans by the laser scanner, the location of mobile laser receiver (i.e. agricultural robot) is obtained by fusing the time difference of laser scanning induction and the point cloud characteristics of mobile laser receiver. The agricultural robot positioning system based on laser sensing consists of mobile laser receiver, processor, fixed laser receiver and two-dimensional laser scanner. The mobile laser receiver and processor are installed on the robot, and the fixed laser receiver and two-dimensional laser radar are fixed at the known geodetic coordinate position. According to the position relationship between the laser scanner coordinate system and the known geodetic coordinate system. The laser scanner scanning at a certain period to obtain a known number of fixed-order point cloud data. The fixed laser receiver senses the periodic irradiation of the laser scanner to generate the base station laser signal, and the serial number of the fixed laser receiver shell in the point cloud is known. The mobile laser receiver senses the periodic irradiation of the laser radar to generate the mobile laser signal during the movement of the robot. According to the trigger time difference between the fixed laser signal and the mobile laser signal, the angle between the laser rays that are irradiated to the mobile laser receiver and the laser rays that are irradiated to the fixed laser receiver can be obtained in a scanning period of the laser scanner. And the scattered point set of the mobile laser receiver in the laser radar point cloud can be found, and the center coordinate of the mobile laser receiver can be obtained by combining the point cloud feature matching algorithm. The robot positioning can be calculated by combined with the geodetic coordinates of the laser scanner and the position relationship between the laser scanner coordinate system and the geodetic coordinate system, the central coordinates of the mobile laser receiver under the geodetic coordinate system. The geodetic coordinates of the robot are calculated by the positioning algorithm based on laser sensing, and the geodetic coordinates of the robot without GNSS signal are supplemented without changing the positioning solution and control algorithm of the existing robot unmanned system. For example, when the robot leaves the hangar, it switches to the GNSS positioning system for positioning and navigation in the area with both the positioning signals of the robot positioning system based on laser perception and the GNSS signal. When entering the hangar, switch to the robot positioning system based on laser sensing for positioning and navigation in the area cover with both the positioning signal of the robot positioning system based on laser perception and the GNSS signal. The verification test is carried out with the reference of total station which shows that within the scanning range of laser radar, when the robot is at a speed of 0.8 m/s, the absolute average value of the maximum deviation of the positioning error in a straight line is 4.1 cm, and the maximum root mean square error is 1.5 cm; when the robot driving on a curve, the absolute average value of the maximum deviation of positioning error is 6.2 cm , and the maximum root mean square error is 2.6 cm. The result shows that this method can achieve accurate robot positioning and meets the positioning accuracy requirements for automatic navigation of agricultural robots in agricultural machinery warehouses and other environments.
robot; laser radar; laser sensing; positioning; intelligent agricultural machinery equipment
10.11975/j.issn.1002-6819.202211144
S24; TP273
A
1002-6819(2023)-05-0001-07
胡煉,王志敏,汪沛,等. 基于激光感知的農業機器人定位系統[J]. 農業工程學報,2023,39(5):1-7.doi:10.11975/j.issn.1002-6819.202211144 http://www.tcsae.org
HU Lian, WANG Zhimin, WANG Pei, et al. Agricultural robot positioning system based on laser sensing[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(5): 1-7. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202211144 http://www.tcsae.org
2022-11-14
2023-01-16
江蘇大學農業裝備學部項目(NZXB20210106);廣東省科技計劃項目(2021B1212040009);佛山市科技創新項目(2120001008424);國家現代農業技術體系(CARS-13)
胡煉,博士,研究員,研究方向為智能農機裝備和無人農場。Email:lianhu@scau.edu.cn
汪沛,博士,講師,研究方向為農業工程、精準農業研究。Email:wangpei@scau.edu.cn
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
今日農業(2020年15期)2020-12-15 10:16:11
今日農業(2019年12期)2019-08-13 00:49:56
現代營銷(創富信息版)(2018年3期)2018-03-15 08:05:29
現代營銷(創富信息版)(2018年2期)2018-02-10 05:20:47
江蘇年鑒(2014年0期)2014-03-11 17:09:36