基于幾何非線性動力組合地基梁模型的漏糞地板自振特性
2023-05-11 02:20:04李百豐張焱輝曹瓊瓊梁宗敏蔣秀根
中國農(nóng)業(yè)大學學報 2023年6期
李百豐 張焱輝 曹瓊瓊,2 羅 雙,3 梁宗敏 蔣秀根*
(1.中國農(nóng)業(yè)大學 水利與土木工程學院,北京 100083;2.鐵總服務有限公司,北京 100844;3.中國農(nóng)業(yè)科學院 基本建設局,北京 100081)
設施養(yǎng)殖由于其養(yǎng)殖工藝標準,生長環(huán)境可控,設施設備完備,滿足健康、綠色、安全的要求,是現(xiàn)代養(yǎng)殖業(yè)的主流生產(chǎn)方式[1]。養(yǎng)殖設施的結構,需要滿足對環(huán)境耐久性和對裝備適用性的要求。以應用最為廣泛的豬舍為例,為了滿足清潔生產(chǎn)的需求,普遍采用條形漏糞孔地板下、配備自動清刮設備的糞溝[2]。除了滿足常規(guī)荷載下地板的承載力要求外,漏糞地板還應滿足由于振動產(chǎn)生的2方面功能需求:一是滿足動物福利要求,對地板振動進行控制,不致由于地板的強烈振動,而引起豬的強烈應激;二是滿足地板耐久性要求,不致由于豬糞便的強腐蝕性和振動產(chǎn)生的裂縫損傷積累2個因素的效應疊加,而引起的使用年限明顯降低。與一般建筑物樓板振動舒適性設計不同的是,漏糞地板簡單支承于糞溝兩側的地面上,可視為由兩端的彈性地基梁和中段的普通梁組成的連續(xù)梁,呈現(xiàn)出典型的組合地基梁特征,其振動分析必須考慮組合彈性地基梁的受力特征。
彈性地基梁是指支承在連續(xù)彈性地基上的梁。在結構分析時應該將其看作是結構-地基之間相互作用的模型進行力學分析,即應考慮彈性地基梁與地基之間協(xié)調(diào)變形。由于連續(xù)彈性地基的存在,彈性地基梁具備了受力及變形2方面特征:由連續(xù)分布支承提供分布力的作用;由彈性支承同時提供幾何約束和梁端自然邊界條件[3-4]。在實際工程中,房屋建筑工程中基礎梁板、護坡,交通工程中的公路面板和機場跑道等結構具有典型的彈性地基梁受力特征,設施農(nóng)業(yè)建筑中的地板也應按照彈性地基梁模型進行分析。
當遇到動力作用時,結構在變形過程中產(chǎn)生的慣性力,除了引起附加的內(nèi)力和變形,影響結構的安全性和適用性外,產(chǎn)生的振動還會引起結構舒適性以及混凝土的裂縫損傷積累導致的耐久性下降[5]。因此對于彈性地基梁分析,除了要考慮基本的靜力分析外,還應考慮結構的動力響應分析。
國內(nèi)外已有研究在彈性地基梁的靜動力響應方面取得了一系列成果,包括彈性地基梁靜力內(nèi)力及變形的有限差分求解方法[6];壓剪地基上Timoshenko梁的動力分析問題求解方案[7];基于微分變換法的自振頻率初參數(shù)求解辦法[8];不同邊界條件下的彈性地基梁自振頻率解析解[9];基于最小勢能原理的彈性地基梁靜力求解辦法[10-11];移動動力荷載下黏彈性地基平動Euler梁的動力響應分析方法[12-13]。但目前關于彈性地基梁分析模型問題的研究相對較少。基于分布質(zhì)量模型的Winkler彈性地基Euler梁求解辦法,對于地基和梁的剪切效應并未考慮[14]。Mously等[15]對Pasternak地基上的平轉(zhuǎn)動Timoshenko梁進行研究,給出了基本固有頻率近似顯式計算模型,但研究僅基于近似位移方程而不具有普遍性。黏彈性Pasternak地基平動Timoshenko梁的自振特性分析模型未考慮地基梁的轉(zhuǎn)動特性[16]。王亞升等[17]采用最小勢能原理方法,獲得了受軸向壓力雙參數(shù)彈性地基平動Euler梁自振問題的求解辦法,但僅考慮了單參數(shù)彈性地基,未能構建全參數(shù)的彈性地基梁分析模型。圍繞樓板振動對人以及儀器設備的舒適度影響已展開了許多研究,如對各國建筑結構設計規(guī)范中樓面舒適度設計要求的匯總和對比,以及以頻率和峰值加速度作為控制參數(shù)的建議指標限值[18-19];基于人體動力試驗的人體舒適度評價方法[20];樓板自振頻率和加速度的簡便求解方法[21];通過蒙特卡洛隨機模擬過程給出的人行荷載下復雜結構樓板振動舒適度評價標準[22]。
本研究擬對豬舍中漏糞地板的自振特性進行分析,考慮地基的壓縮和剪切剛度、梁的彎曲和剪切變形、運動的平動和轉(zhuǎn)動慣性力,以期建立幾何非線性雙參數(shù)彈性地基梁運動方程,給出組合地基梁自振周期求解模型。
1 基本模型與理論
1.1 模型及假定
對于彈性地基梁,按照右手螺旋準則建立坐標系,以梁的左端截面形心為原點O,梁軸線為x軸,向右為正;y軸垂直于梁軸線,向下為正;z軸垂直于xOy平面,向內(nèi)為正。對彈性地基梁進行受力分析見圖1。

V1,V2分別為左端截面和右端截面的剪力;M1,M2分別為左端截面和右端截面的彎矩;N1,N2分別為左端截面和右端截面的軸力;l為彈性地基梁長度。V1 and V2 are shear force of left section and right section.M1 and M2 are bending moment of left section and right section.N1 and N2 are axial force of left section and right section.l is elastic foundation beam length.圖1 彈性地基梁坐標系及受力示意圖Fig.1 Coordinate system and force diagram of elastic foundation beam
彈性地基梁所受外力包括,軸力N0、分布線荷載qy、分布彎矩荷載mz、截面上的地基反力P、慣性力fv、慣性力矩fθ。規(guī)定荷載方向與坐標軸方向一致為正,軸力以壓力為正。內(nèi)力包括彎矩M和剪力V。規(guī)定當截面法線方向與坐標x軸正向一致時,內(nèi)力與坐標軸方向一致為正;當截面法線與坐標x軸正向相反時,內(nèi)力與坐標軸方向相反為正。
彈性地基梁位移包括,撓度v、軸線轉(zhuǎn)角φ、截面轉(zhuǎn)角θ、截面剪切角γ、截面曲率κ。規(guī)定位移與坐標軸正向一致為正。
本研究基于以下基本假定:等直梁模型,梁的各個截面相等且始終保持為平面;Timoshenko梁模型,考慮剪切作用的影響,軸線轉(zhuǎn)角等于截面轉(zhuǎn)角與截面剪切角之和;全慣性模型,考慮梁的橫向振動和轉(zhuǎn)動慣性力;大撓度模型,考慮軸力在撓度上產(chǎn)生的二階彎矩;線彈性模型,梁的剛度保持不變,內(nèi)力和位移的關系服從胡克定律;壓剪地基模型,梁與地基無分離,結構-地基之間豎向位移一致。
1.2 基本方程
彈性地基梁位移控制方程是在平衡方程、幾何方程、物理方程和地基模型的基礎上建立的。本研究以彈性地基梁微段隔離體為研究對象建立基本方程。
1.2.1平衡方程
分別建立剪力平衡方程和彎矩平衡方程:
(1)

(2)
式中:b為彈性地基梁的寬,m;m為彈性地基梁的線密度,kg/m;ρ為材料體積密度,kg/m3;I為彈性地基梁對z軸的截面慣性矩,m4。
1.2.2幾何方程
彈性地基梁的幾何方程為[23]:
dv=tanφdx=φdx
(3)
(4)
(5)
1.2.3物理方程
彈性地基梁的物理方程為[24]:
M=EI·κ
(6)
(7)
式中:E為梁的彈性模量,GPa;G為梁的剪切模量,GPa;A為梁的截面面積,m2;μ為梁的截面剪應力分布不均勻系數(shù)。
1.2.4地基模型
壓剪地基模型單位面積上地基反力的表達式為[3]:
(8)
式中:k為地基壓縮剛度,N/mm3;Gp為地基剪切剛度,MPa。
1.3 控制方程
采用分離變量法,令:

(9)

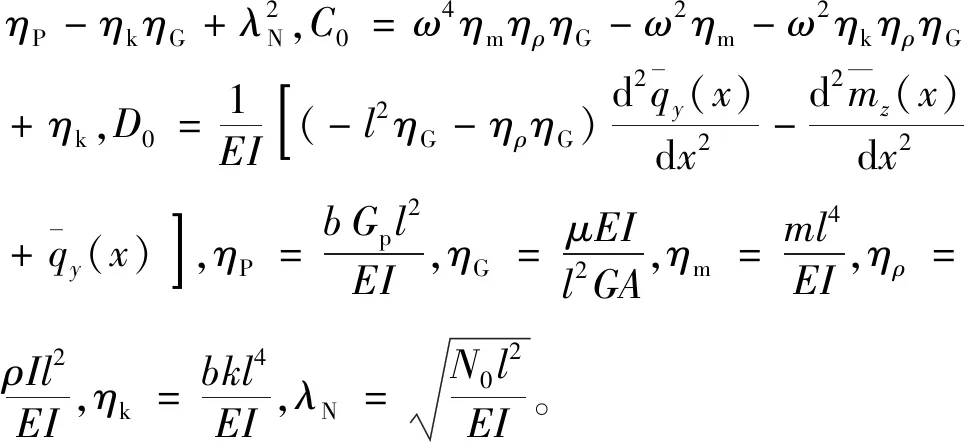
綜合基本方程(1),(2),…,(8),結合式(9),得到彈性地基梁撓度控制方程為:
(10)
進一步,得到截面轉(zhuǎn)角及截面剪切角控制方程為:

(11)

(12)
1.4 位移及內(nèi)力
1.4.1撓度
求解控制方程(10),得到彈性地基梁撓度四階齊次微分方程通解的一般形式為:
(13)
式中:c1,c2,…,c4為位移系數(shù);r1,r2,…,r4為方程的特征根。
撓度通解(13)的向量格式為:
(14)

基函數(shù)導數(shù)向量表達式為:
f′v=fvZv
(15)
式中:Zv為撓度基函數(shù)向量對應的導數(shù)轉(zhuǎn)換矩陣。不同工況下?lián)隙然瘮?shù)向量表達式見表1。
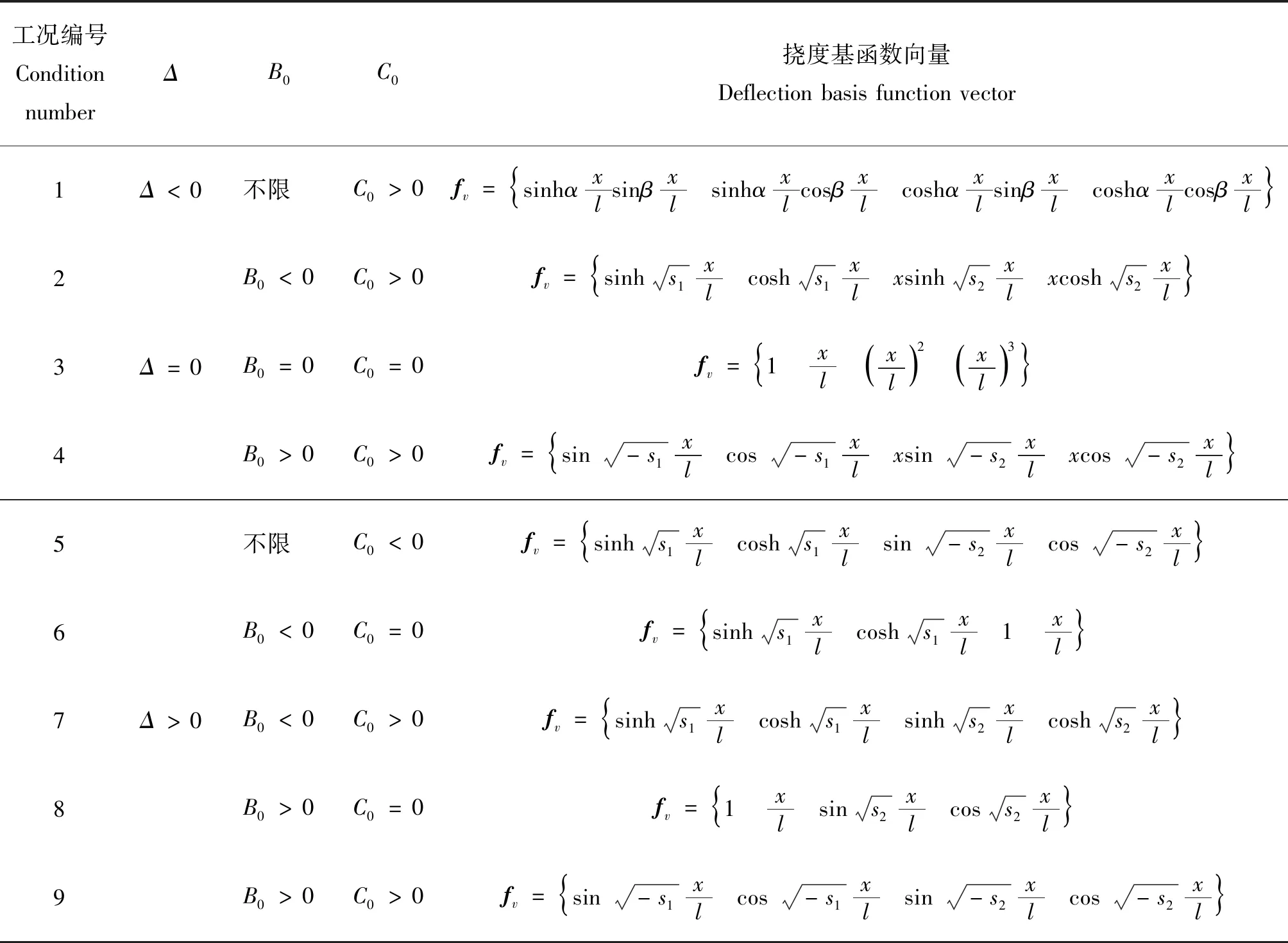
表1 不同工況下?lián)隙然瘮?shù)向量表達式Table 1 Deflection basis function vector expressions under different working conditions
導數(shù)轉(zhuǎn)換矩陣可由基函數(shù)向量求導得到。例如,對于工況5導數(shù)轉(zhuǎn)換矩陣為:
(16)
對于工況7導數(shù)轉(zhuǎn)換矩陣為:
(17)
1.4.2變形
1.4.3內(nèi)力

2 組合地基梁自振分析
2.1 結構模型及邊界條件
典型的組合地基梁為由兩端搭支在彈性地基上的彈性地基梁與中間懸空的普通梁組成的三段連續(xù)梁(圖2)。結構參數(shù)為:支承長度lⅠ=lⅢ=250 mm;溝寬lⅡ=3 000 mm;地基壓縮剛度k=100 N/mm3;地基剪切剛度GP=40 MPa。組合地基梁的邊界條件見表2。

Ⅰ、Ⅱ、Ⅲ為桿件編號;1,2,…,4為節(jié)點編號。Ⅰ、Ⅱ、Ⅲ are lever number,1,2,…,4 are node number.圖2 組合地基梁示意圖Fig.2 Diagram of combined foundation beam

表2 組合地基梁邊界條件Table 2 Combined foundation beam boundary conditions
2.2 組合地基梁自振方程
依據(jù)組合地基梁邊界條件,代入位移及內(nèi)力表達式建立自振方程:
Acoefc=0
(18)
式中:Acoef為系數(shù)矩陣,表達式為:
(19)
式中,c為位移系數(shù)向量,c={c1c2…c12}T。
2.3 自振周期及振型分析
Acoef中的元素均是與自振頻率ω相關的表達式。對于齊次線性方程組,振動時有非零解,須滿足系數(shù)矩陣行列式等于0,即得到自振頻率的特征方程:
|Acoef|=0
(20)
采用數(shù)值計算方法,求解方程(20)得到組合地基梁的自振頻率。將自振頻率代入周期計算公式:
(21)
計算出組合地基梁的自振周期。將自振頻率回帶自振方程(18),求得對應的位移系數(shù)向量。結合撓度表達式(14)得到各模態(tài)下彈性地基梁振型曲線。
3 算例與分析
3.1 組合地基梁自振特征
為研究組合地基梁的自振特征,以典型漏糞地板為分析對象,采用壓剪地基平轉(zhuǎn)動Timoshenko梁模型對其進行自振分析。結構參數(shù)為:截面尺寸100 mm×100 mm、支承長度lⅠ=lⅢ=250 mm、溝寬lⅡ=3 000 mm、地基壓縮剛度k=100 N/mm3、地基剪切剛度GP=40 MPa、材料的彈性模量E=32.5 GPa、剪切模量G=11.4 GPa、密度ρ=2 400 kg/m3、截面剪應力分布不均勻系數(shù)μ=1.2。
采用本研究模型,計算得到組合地基梁前5個模態(tài)的振型曲線見圖3。結果表明:1)采用本研究模型可以有效得到組合地基梁的自振周期和振型曲線;2)與普通梁相比,組合地基梁的振型出現(xiàn)了非單調(diào)波形增加的現(xiàn)象。

圖3 組合地基梁前5模態(tài)的振型曲線Fig.3 The first five mode shape curves of combined foundation beams
為進一步研究組合地基梁的自振規(guī)律,本研究選取了10個結構模型,在總梁長不變的前提下,分別改變其溝寬尺寸和地基剛度,得到了各模型下的自振周期及對應的振型曲線。自振周期計算結果見表3。典型組合地基梁(模型4)和典型彈性地基梁(模型7)的振型曲線分別見圖4和圖5。由計算結果可以看出:組合地基梁的模態(tài)與普通等直梁的模態(tài)有明顯差別,表現(xiàn)在不僅自振頻率不同,振型分布也存在差異性。模型7為典型的彈性地基梁,前5階振型曲線呈現(xiàn)典型的單一梁自振規(guī)律,其他所有組合地基梁的振型曲線分布均和全參數(shù)典型漏糞地板模型結果一致。其原因是,中間普通梁段的剛度較小,基本周期較大,在長周期狀態(tài)下,彈性地基梁段尚未發(fā)生振動,中間普通梁段帶動了兩邊地基梁段的振動,彈性地基梁段發(fā)生了近似剛體位移。
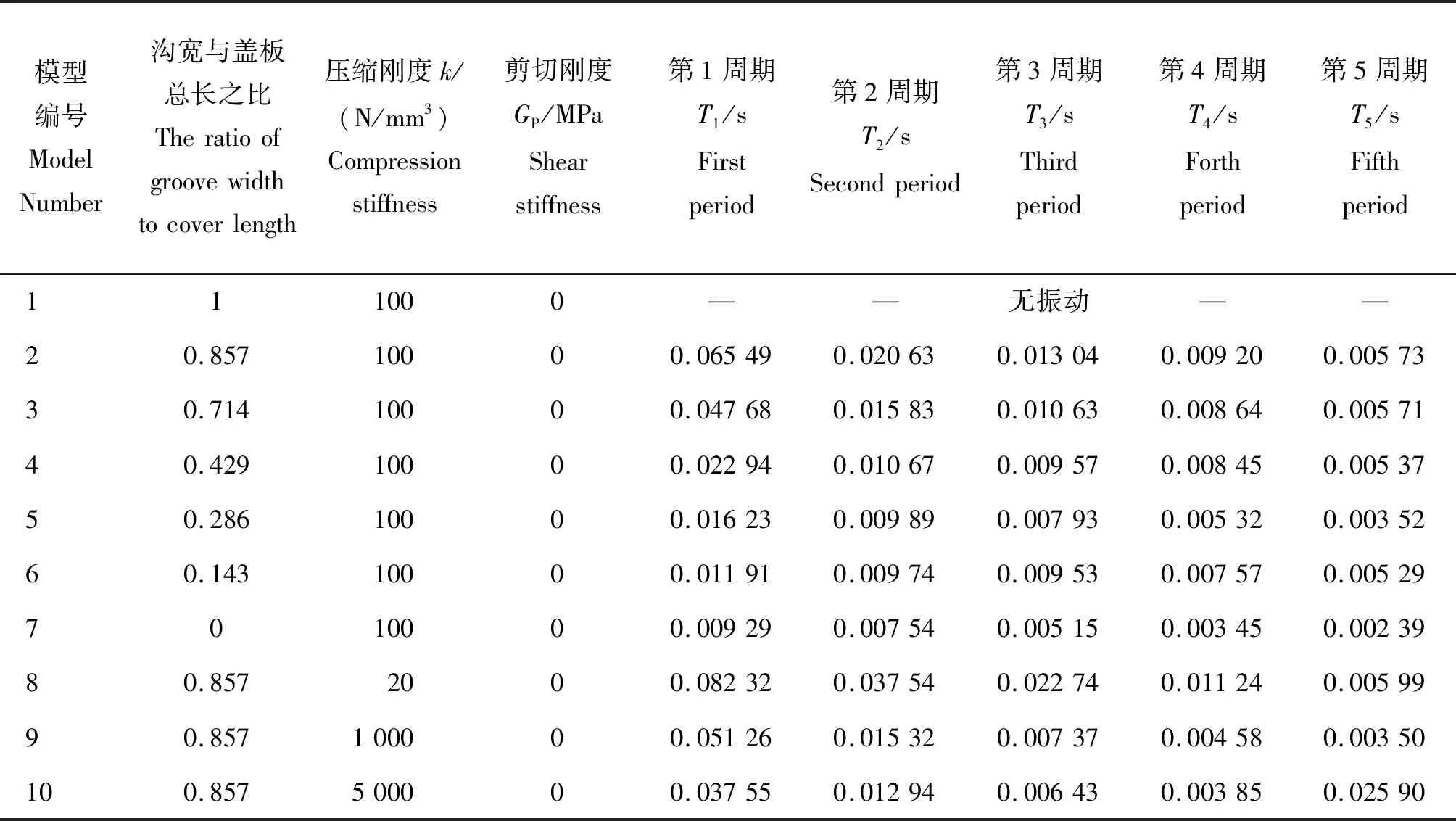
表3 組合地基梁不同模型結構參數(shù)及自振周期Table 3 Structural parameters and natural vibration period of different combined foundation beam models

圖4 模型4前5模態(tài)的振型曲線Fig.4 The first five mode shape curve of mode 4
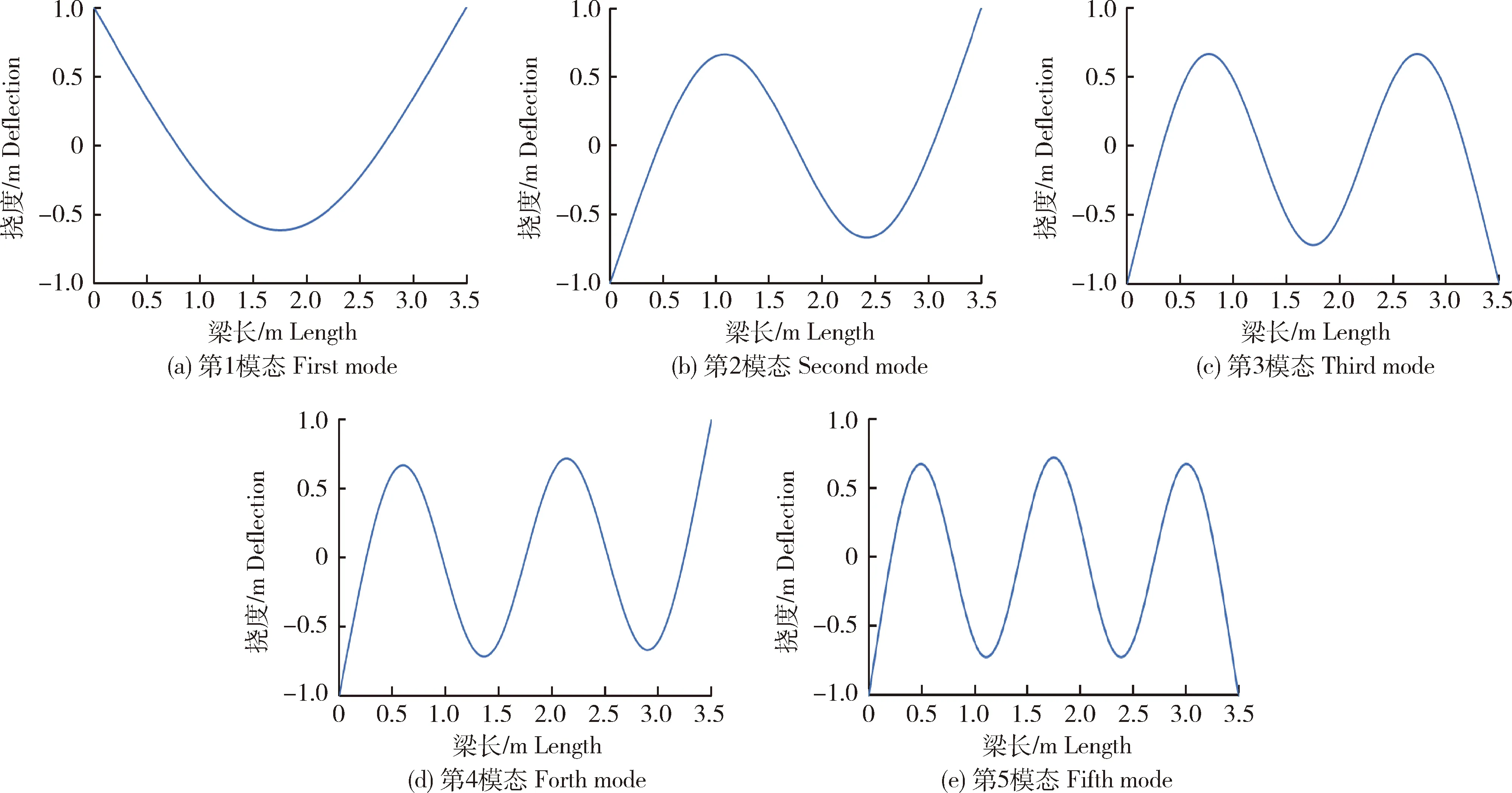
圖5 模型7前5模態(tài)的振型曲線Fig.5 The first five mode shape curve of mode 7
3.2 漏糞地板自振周期
為得到典型鋼筋混凝土漏糞地板的自振周期,本研究采用不同的分析模型,計算漏糞地板的自振周期。共選取了10種工況,其中工況1為簡支普通等直梁模型。漏糞地板彈性模量E=32.5 GPa;剪切模量G=11.4 GPa;密度ρ=2 400 kg/m3;截面剪應力分布不均勻系數(shù)μ=1.2;溝寬lⅡ=3 000 mm;梁長l=2lⅠ+lⅡ;截面高度h=100 mm;支承長度lⅠ除工況4為500 mm外,其余均為250 mm;截面寬度b除工況3中bⅠ=bⅢ=125 mm外,其余均為100 mm。漏糞地板模型及結構參數(shù)見表4,自振周期計算結果見表5。由計算結果可以看出:

表4 漏糞地板模型及結構參數(shù)Table 4 Models and structural parameters of leakage floor

表5 漏糞地板自振周期Table 5 Natural vibration period of leakage floor s
1)工況1比工況2基本周期短17.29%,這是因為考慮坑邊剛性點支承的簡支梁結構忽略了地基的變形,導致梁支座剛度變大,自振周期減小明顯;工況3與工況2的基本周期完全一致,這是由于板帶模型寬度不改變板的振動特性;工況4比工況2基本周期短76.83%,這是因為支承長度的增加導致了組合地基梁支承剛度增加,自振周期減小。工程中,可以通過調(diào)整支承長度改變漏糞地板的自振周期,使其滿足舒適性要求。
2)工況5比工況2基本周期長25.38%,隨著地基壓縮剛度的增大,漏糞地板自振周期的呈減小趨勢,但減小漸緩,其原因是地基剛度的提高使得結構整體剛度隨之增大,自振周期減小,但當?shù)鼗鶆偠茸銐虼蠛?地基變形增加不再明顯,組合地基梁逐漸呈現(xiàn)出坑間簡支梁的變形特征,因此可以通過改變地基墊層密實度來對漏糞地板進行振動控制;工況6和8及7和9對比發(fā)現(xiàn)Timoshenko梁模型比Euler梁模型的基本周期長0.09%左右,相差不大,其原因是Timoshenko梁模型考慮了剪切變形,使得結構剛度減小,自振周期增加,相差不大的原因是與跨度相比地板厚度較薄,剪切變形與彎曲變形相比可以忽略;工況6和7及8和9對比發(fā)現(xiàn)平轉(zhuǎn)動模型比平動模型的基本周期長0.04%以內(nèi),相差細微,其原因是平轉(zhuǎn)動模型考慮了轉(zhuǎn)動慣性力,增加了結構的位移,導致結構剛度減小,自振周期增加,相差細微的原因是與跨度相比地板厚度較薄,截面抗彎剛度較小,轉(zhuǎn)動慣性力與平動慣性力相比可以忽略;工況6和10及8和2對比發(fā)現(xiàn)壓剪地基梁模型比壓縮地基梁模型的基本周期短0.7%以內(nèi),偏差較小,其原因是壓剪地基梁模型考慮了地基的剪切剛度,導致結構整體剛度增加,自振周期減小,偏差較小的原因是兩端彈性地基梁段振型呈擬剛體運動特征,局部位移為直線分布,二階導數(shù)近似為零,由于地基反力剪切項與豎向位移的二階導數(shù)成正比,該分項較小,剪切引起的地基反力與壓縮引起的地基反力相比可以忽略。
為反映漏糞地板自振周期和地基剛度的關系,根據(jù)表3中的計算結果,漏糞地板第1周期隨壓縮剛度的變化見圖6。
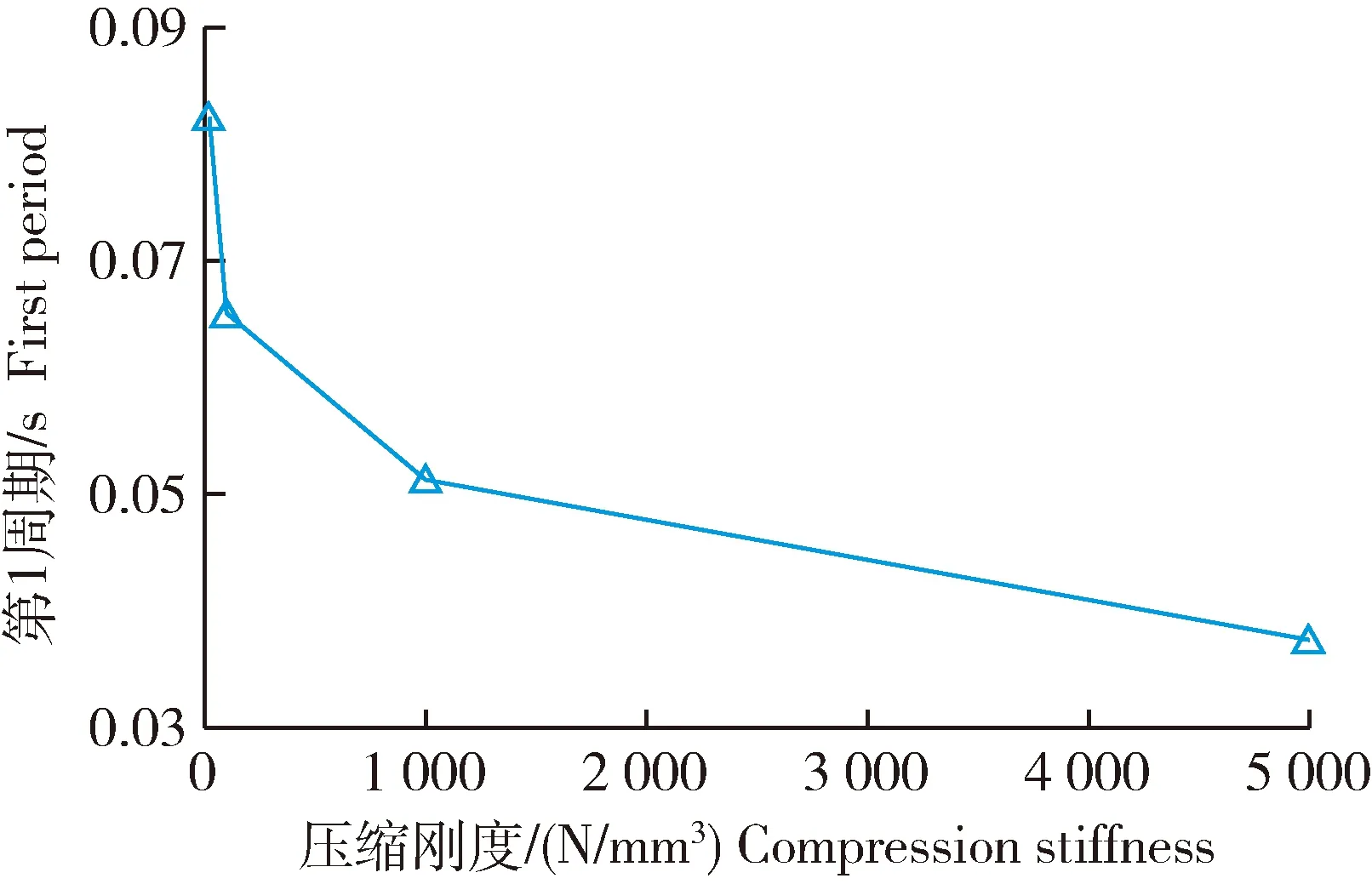
圖6 漏糞地板第1周期隨壓縮剛度變化Fig.6 The curve of first period of the leakage floor with compression stiffness
3.3 簡化漏糞地板自振周期計算方法
對漏糞地板進行自振周期分析時,在保證工程精度要求的前體下,應采用組合彈性地基梁模型,為計算簡便考慮,可忽略端部縫間板條、梁的剪切變形、轉(zhuǎn)動慣性力和地基的剪切剛度的影響。亦即采用壓縮地基平動Euler組合地基梁模型對漏糞地板進行計算。
對于壓縮地基平動Euler組合地基梁模型,其撓度基函數(shù)向量為:
(22)
由式(19)可得系數(shù)矩陣表達式為:
(23)
式中:ZvⅠ和ZvⅢ由式(17)得到,ZvⅡ由式(16)得到。
4 結束語
本研究綜合考慮了地基的壓縮和剪切剛度、梁的彎曲和剪切變形、運動的平動和轉(zhuǎn)動慣性力以及軸力的二階效應,建立了幾何非線性壓剪平轉(zhuǎn)動Timoshenko彈性地基梁動力模型。給出組合地基梁自振特性計算方法,并對漏糞地板的自振特性進行了分析。研究表明,組合地基梁的自振特性與普通梁相比存在明顯差異。各結構參數(shù)對組合地基梁的自振周期存在不同程度的影響:端部縫間板條無影響;支承長度及地基剛度影響明顯,不可忽略;剪切變形、轉(zhuǎn)動慣性力和地基的剪切剛度的影響較小,可以忽略不計。本研究建立的模型可對漏糞地板自振周期進行簡化計算。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
中華詩詞(2020年1期)2020-09-21 09:24:52
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數(shù)理化·七年級數(shù)學人教版(2017年11期)2017-04-23 07:18:00
數(shù)學大王·中高年級(2016年12期)2016-12-26 21:37:36
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03