航空攝影測量技術在綠色礦山建設動態監測中的應用
2023-05-06 08:31:30饒興元
資源導刊(信息化測繪) 2023年3期
饒興元
(梅州市測繪與地理信息中心,廣東 梅州 514071)
1 引言
礦山作為我國自然資源的重要組成部分,對資源生態服務、地質環境恢復與管理具有較大影響[1]。在礦產資源開發工程高速發展的背景下,綠色礦山建設理念逐漸興起[2]。基于廣義角度分析,綠色礦山建設是指采用科學有序的開采方法,在礦山資源開采過程中,控制礦山周邊生態環境的擾動,全面實現科學化開采礦產資源、高效化利用礦山資源、和諧化管理礦山的目標[3]。現階段,我國在綠色礦山建設動態監測方面的研究日益成熟,能夠有效監測礦山開采過程中的異常情況。文獻[4]提出基于BDS-3 衛星導航技術的礦山動態監測方法,通過分析雷達遙感、無人機遙感、遠距離三維激光掃描、無人機傾斜攝影、激光雷達等現代測量技術的優缺點,以及將這些技術應用于礦山動態監測中的可行性與局限性,實現礦山動態監測。文獻[5]提出基于傾斜攝影測量技術的礦產資源監測方法,通過構建礦山監測區域的DEM、DOM、實景三維模型等傾斜攝影測量產品,分析露天礦山企業在該時間段內的開采量、儲量、變化區域,以及是否存在越界違法開采現象等。但上述方法對無人機飛行作業高度計算的精度較低,導致航線路徑規劃存在較大偏差,降低了礦山建設動態監測結果的準確率。
航空攝影測量技術可以根據被監測礦山的實際情況,采用高精度無人機,設計指定的監測飛行路線,監測中心根據礦區地物分布情況,實時調整無人機的監測航線,具有較高的靈活性與監測精度。基于此,本文引入航空攝影測量技術,提出了一種全新的綠色礦山建設動態監測方法,有助于促進我國綠色礦山建設的信息化、智能化發展。
2 綠色礦山建設動態監測方法設計
2.1 布設綠色礦山地面監測控制點
本文設計的綠色礦山建設動態監測方法,是采用實時動態載波相位差分技術,全方位分析被監測礦區的相關情況[6]。依據被監測礦區的三維坐標,布設地面監測控制點,為后續無人機動態監測提供基礎保障[7]。首先選取綠色礦山中基準站與流動站的布設位置,通過GPS 衛星定位與無線電通訊系統,實時獲取礦山內的載波觀測信號,提取礦山地面監測控制點的有效坐標值[8]。其次,采用彩帶十字絲方法,布設地面監測控制點。需注意,由于礦區地形變化顯著,且存在一定的不確定性,在礦山采坑區域周圍布設地面監測控制點時,盡量布設密集一些 ;在地形平緩區域,可以相對稀疏一些,保證地面監測控制點覆蓋綠色礦山所有區域。
2.2 基于航空攝影測量技術規劃無人機動態監測任務
地面監測控制點布設完成后,采用航空攝影測量技術規劃設計無人機飛行任務。首先,根據礦山監測區域的地形、氣候、地質條件等情況,選取分辨率與精度較高的無人機。本文選取MAVIC PRO 四旋翼無人機,機身尺寸為214mm×91mm×84mm,重量約為905g,具有2000 萬有效像素,最大信號有效距離分別為:FCC:10000m;CE:6000m;SRRC:6000m;MIC:6000m。其次,基于航空攝影測量技術對礦山監測區域的地形進行考察,結合考察結果布設礦區地面控制點。無人機飛行任務規劃流程如圖1 所示。
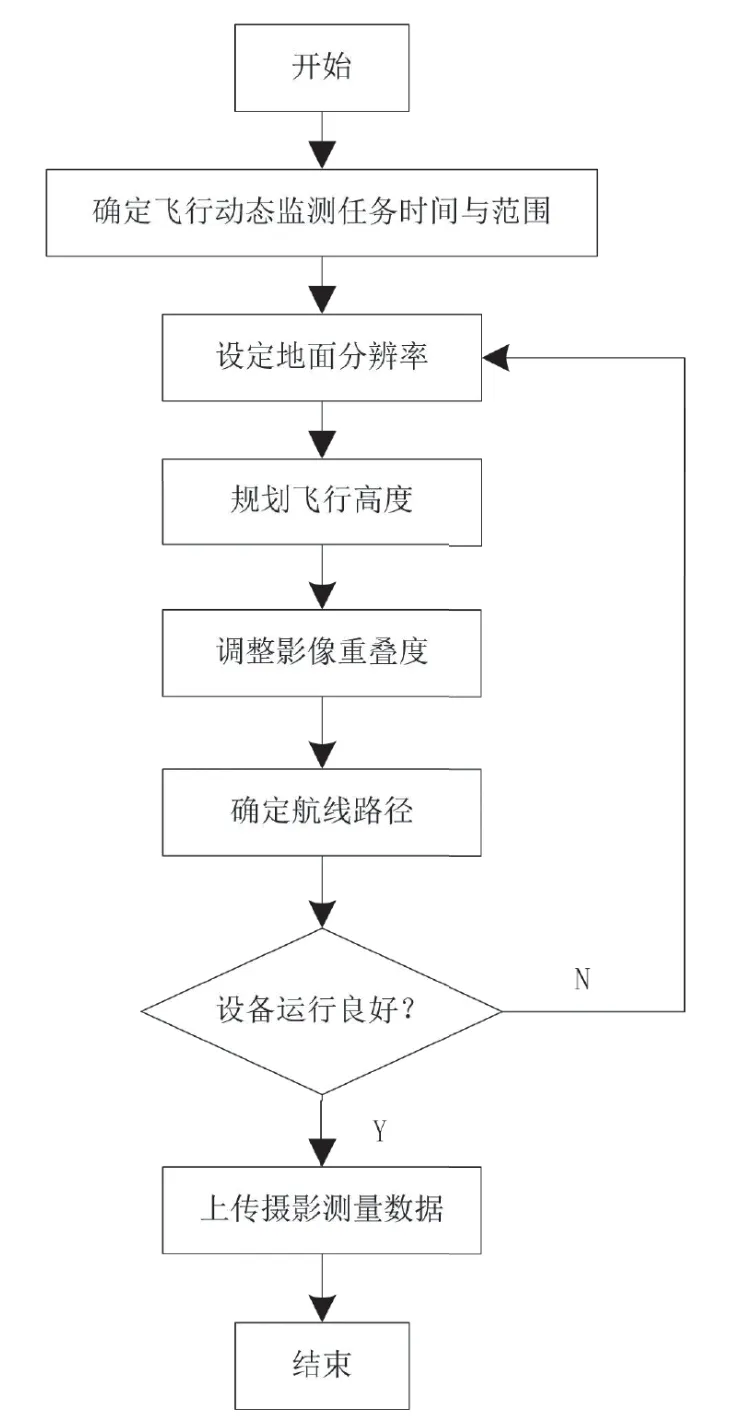
圖1 無人機動態監測飛行任務規劃流程
開展無人機飛行任務首先要根據多傳感器采集的監測礦區氣象數據,確定無人機飛行動態監測任務時間,依據導航地圖軟件,獲取無人機禁飛空域,進而確定動態監測作業范圍。然后設定不同比例尺下綠色礦山建設動態監測影像的地面分辨率。根據地面分辨率、無人機相機焦距以及航空攝影像元尺寸之間的關系,規劃無人機動態監測的飛行高度,計算公式為:
公式(1)中,qx表示綠色礦山建設動態監測影像的地面分辨率;f表示無人機相機焦距;p表示航空攝影像元尺寸。無人機動態監測作業飛行高度確定后,為提高航空攝影測量的準確度,應實時調整相同航線上礦山監測影像的重疊度,避免相鄰影像重疊度超出范圍。在此基礎上,計算無人機動態監測飛行作業基線的長度,確定無人機飛行航線路徑,計算公式為 :
公式(2)中,L表示無人機動態監測飛行作業基線長度;hx表示無人機飛行作業航線間的間隔寬度;rx表示無人機飛行作業航向重疊度。
通過計算,獲取無人機動態監測飛行作業的基線長度,確定無人機的航線路徑,然后檢查與調試無人機設備的運行狀況,檢查無誤后開始無人機航空攝影測量,實時將無人機航空攝影測量數據上傳至飛控系統。數據采集結束后,監測中心的工作人員要及時查看礦山中是否存在漏拍區域,若出現異常,則對異常部分進行補拍。
3 實例分析
為了進一步驗證本文設計的無人機動態監測方法的有效性與應用效果,以S 綠色礦山建設工程為例,進行了實例應用分析。
3.1 礦山概況
選取某地區S 綠色礦山工程為研究對象,該礦山整體呈現ES 走向,為斜坡地形,屬巖溶槽坡地貌。礦區最高點高程為+425.82m,最低點高程為+332.45m,礦區地形坡角在25°~40°范圍,地表水排放情況良好,較難形成礦區地表水匯集。S 綠色礦山所在區域屬于亞熱帶濕潤季風氣候,降雨量充沛,最大年降雨量約為1468.25mm,降雨主要集中在每年的5~8 月份,礦區平均相對濕度為78.2%。全面掌握該礦山工程情況后,將本文設計的無人機動態監測方法應用到S 綠色礦山建設中,實時監測礦山的動態變化。
3.2 結果分析
為了更加直觀地驗證本文方法的可行性,將上述基于航空攝影測量技術的綠色礦山建設動態監測方法,分別與文獻[4]、文獻[5]方法進行對比分析。采用精度較高的多旋翼無人機航空攝影測量系統與內業影像解譯系統作為試驗工具,檢查航空攝影影像質量,查看有無明顯云霧遮擋、影像清晰度是否符合要求等。利用Context Capture 軟件,對航空攝影影像進行三維建模,基于S 綠色礦山簡單的重疊影像,構建模擬出真實的監測礦區三維場景。
在S 礦山監測區域,隨機布設6 組礦區地面控制標靶監測站點,分別標號為LSKS01、LSKS02、LSKS03、LSKS04、LSKS05、LSKS06。掌握S 礦山像控點的變化,采用空三加密點,計算出礦區地面控制標靶監測站點的不規則三角網TIN。應用三種礦山建設動態監測方法,實時獲取礦山成果數據,得出監測站點的監測高程值,如表1 所示。
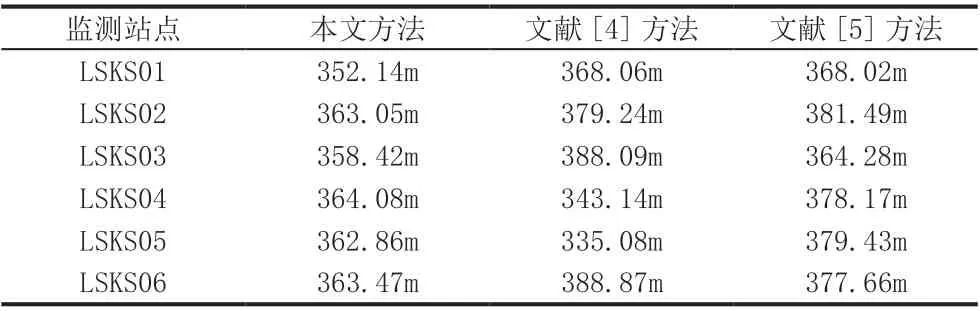
表1 三種方法礦山監測站點監測高程值
從表1 可以看出,三種方法獲取的監測高程值差異明顯。為了驗證監測高程值的精度,利用有限元分析軟件,測定S 礦山監測區域地面控制標靶監測站點的實際高程值,并與三種方法監測到的高程值進行對比,獲取三種監測方法的高程誤差率,如圖2 所示。
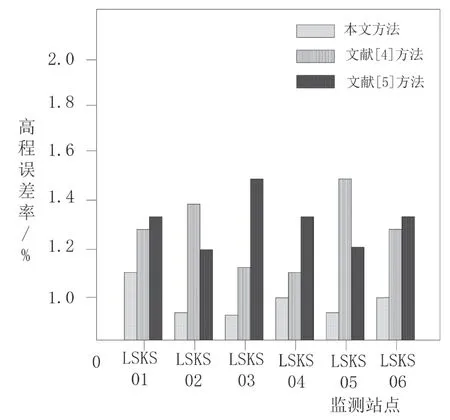
圖2 三種監測方法高程誤差率對比
從圖2 可知,采用本文提出的基于航空攝影測量技術的綠色礦山建設動態監測方法,各地面控制標靶監測站點的高程誤差率均在1.2%以下,低于另外兩種監測方法,且監測結果精度更高,偏差更小,優勢顯著。
為進一步驗證本文方法的實用性,以礦山監測時間為實驗指標,采用本文方法、文獻[4]方法與文獻[5]方法進行對比測試,測試結果如圖3 所示。
由圖3 可以看出,本文方法的監測時間最高為28s,文獻[4]方法的監測時間最高為50s,文獻[5]方法的監測時間最高為69s,本文方法的監測時間明顯低于其他兩種方法,效率較高,可有效實現對礦山的動態監測。
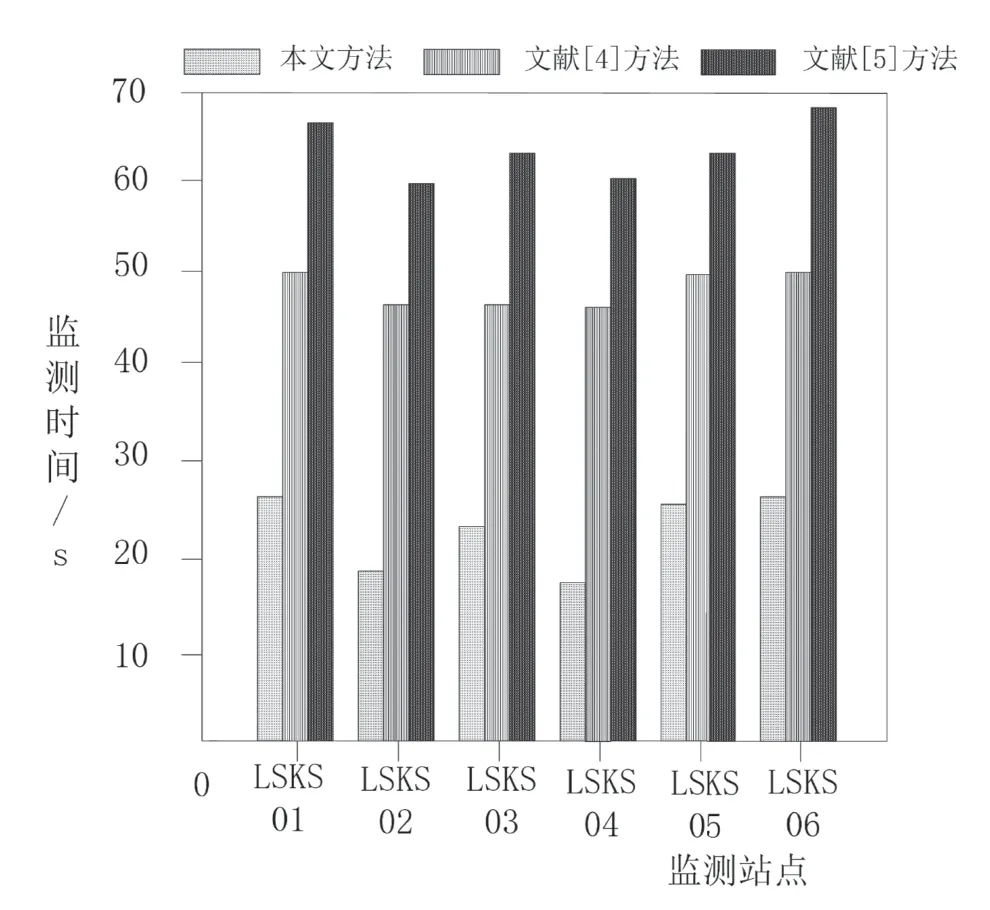
圖3 三種方法監測時間對比
4 結束語
綠色礦山是我國重要的自然資源之一,對其環境、地質與資源的動態監測要求較高。綠色礦山建設動態監測方法能有效監測開采區域地質災害、生態平衡的動態變化,為礦山安全高效開采、礦區生態恢復治理提供依據。為改善傳統礦山動態監測方法精度較低的問題,本文引入航空攝影測量技術,設計了一種全新的無人機動態監測方法,可有效提高礦山監測結果的精度,降低礦山地質災害發生與環境破壞的可能性,對促進我國綠色礦山生態管理發展具有重要意義。
猜你喜歡
品牌研究(2022年26期)2022-09-19 05:54:46
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
海峽姐妹(2019年3期)2019-06-18 10:37:10
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21