炸點目標雷達回波建模及雙門限檢測算法研究
2023-04-07 10:01:26潘慧沖羅丁利徐保慶
火控雷達技術 2023年1期
潘慧沖 羅丁利 徐保慶
(西安電子工程研究所 西安 710100)
0 引言
雷達目標特性是雷達技術的重要研究內容。對于戰場偵察雷達,常見的目標形式包括單兵、車輛、坦克、直升機等,而炸點目標則是一類特殊的目標。目前,國內外對戰場偵察雷達目標種類的研究主要針對于單兵、車輛、飛行器等,對炸點目標的研究十分稀少。炸點目標相對普通目標包含更加復雜的速度成分,使炸點回波具有相對復雜的多普勒頻率組成[1],在深入分析炸點目標與戰場偵察雷達其它各類目標回波特性的基礎上,可以進一步對各類目標的分類特征進行提取[2]。各類恒虛警檢測算法在不同的雜波背景下表現出的檢測性能也各不相同[14],很難找出一種恒虛警檢測算法對炸點目標進行有效地檢測,而雙門限檢測通過合理設置兩重門限檢測算法,可以在低數據率傳輸時實現較好的目標檢測效率[12-13]。無論是在炮兵的訓練過程中,還是在戰場偵察上,對炸點目標快速而準確地檢測與識別都是雷達發揮高效作戰效能的基礎。當下對炸點的研究中缺少有效的炸點模型,炸點爆炸過程中的干擾因素較多,而且對于炸點爆炸時的內部參數難以進行有效測量;雷達虛警問題也一直存在,而“炸點+虛警”則更是一個棘手的雙重問題。本文針對于炸點目標的研究現狀,從爆炸過程中反射物飛行過程的角度建立炸點模型,以點目標回波建模的方法為基礎,對炸點回波進行建模,與實測炸點回波數據進行對比分析;基于炸點目標的回波特性,對炸點目標的檢測采用雙門限檢測算法,根據檢測結果設置特征門限值,對檢測結果是否為炸點目標進行判斷,以實測炸點數據進行驗證,檢驗算法對炸點目標的檢測性能。
1 炸點數學模型
在炸點爆炸過程中,因爆炸而飛射出的主要反射物有飛石、彈片和土塊等,此外,還包括由爆炸氣流引起的沙塵等。在對爆炸過程的建模分析中,將主要反射物簡化為點目標,忽略沙塵等細小目標,進而將炸點目標看作是由無數點目標進行矢量疊加而成。建立雷達-炸點三維直角坐標系,雷達位于直角坐標系原點,炸點坐標位于(x0,y0,z0),炸彈爆炸后,首先對單個點目標進行建模分析。
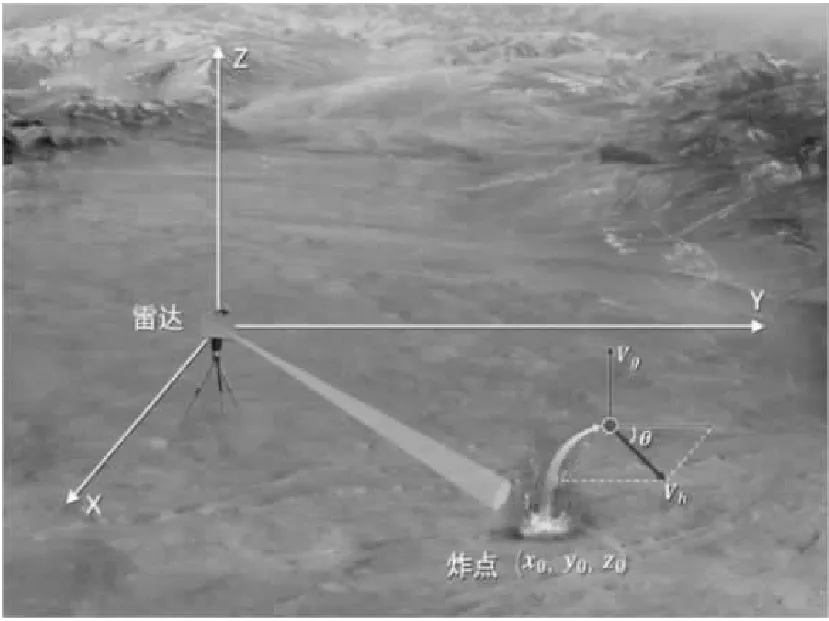
圖1 炸點建模示意圖
點目標速度由垂直速度分量和水平速度分量合成,水平速度分量與Y軸夾角為θ,假設水平初始速度為(vh0sinθ,vh0cosθ,0),垂直初始速度為(0,0,vg0),雷達掃描間隔為TS,點目標在運動過程中受重力與空氣阻力的作用作減速運動,其中重力方向垂直向下,空氣阻力的公式為
(1)
其中,C為空氣阻力系數,該值通常為實驗值,與物體的自身性質有關;ρ為空氣密度;S為物體迎風面積;ν為物體與空氣相對運動速度。
為簡化模型,可將公式(1)簡化為
F=kν2
(2)
其中,k為簡化后的空氣阻力系數,空氣阻力方向與點目標運動方向相反,大小與點目標運動速度的平方成正比,則點目標所受空氣阻力的初始值為
(3)
空氣阻力方向與水平方向夾角的初始值為
(4)
水平方向加速度的初始值為(假設點目標質量為1)
ah=Fcosα
(5)
垂直方向加速度的初始值為
ag=Fsinα+g
(6)
隨著爆炸進行,點目標水平運動速度為
vh(n)=vh(n-1)-ah(n-1)TS
(7)
點目標垂直方向運動速度為
vg(n)=vg(n-1)-ag(n-1)TS
(8)
式(8)中,n表示雷達掃描幀數,矢量合成后的速度為
v(n)=[(vh(n-1)-ah(n-1)Ts)sinθ,
(vh(n-1)-ah(n-1)Ts)cosθ,
vg(n-1)-ag(n-1)Ts]
(9)
點目標所受空氣阻力為
(10)
空氣阻力方向與水平方向夾角為
(11)
水平加速度為
ah(n)=F(n)cos(α(n))
(12)
豎直加速度為
ag(n)=F(n)sin(α(n))+g
(13)
點目標的位置為
(14)
雷達測得的距離為
(15)
雷達測得的速度vradar為v在雷達視線方向的投影,令a=[x(n),y(n),z(n)],則投影速度分量為
(16)
其中,(v,a)表示向量v和a的內積。至此,單個爆炸點目標運動模型已經建立完成,其與炸點的初始位置、初始速度以及飛射角度θ有關,其中θ服從[0,360]均勻分布,每個角度Δθ=1°飛射出點目標的數量服從[0,100]均勻分布,水平初始速度與豎直初始速度都服從[0,80]均勻分布。
2 炸點目標雷達回波建模
對炸點目標的雷達回波進行建模,首先對炸點爆炸過程中單個點目標的回波進行建模分析,然后將炸點爆炸過程中所有點目標回波進行矢量疊加,構成炸點目標的回波信號,接下來對雜波與噪聲進行建模,將三者疊加構成炸點目標的雷達回波信號。
2.1 炸點目標回波信號建模
首先對爆炸過程中單個點目標的回波信號進行建模分析,在本文中,發射波為脈沖式線性調頻信號,假設線性調頻信號st(t),脈沖寬度為T,帶寬為B,可表示為
st(t)=μ(t)ej2πf0t
(17)
式(17)中,f0為載頻,μ(t)為信號復包絡,具體表達式為
(18)
(19)
式(19)中,M為發射的脈沖數,Tr為脈沖重復周期。
由式(15)、式(16)可得
(20)
(21)
式(20)中,τ(n)為回波時延;c為光速。式(21)中,fd(n)為多普勒頻率;λ為雷達發射波長。
則運動“點目標”回波信號為
sr(n)=SLFM(n-τ(n))ej2πfd(n)(nTS-τ(n))
(22)
根據上述對點目標回波建模的分析,將爆炸過程中飛射出的主要反射物簡化為點目標,將點目標回波進行矢量疊加,共同構成炸點目標的回波信號,則炸點目標回波表達式為
(23)
式(23)中,N為nTS時刻炸點中所包含點目標的數目;τi(n)表示第i個點目標的時延;fdi(n)表示第i個點目標的多普勒頻率。
2.2 雜波及噪聲信號建模
本文中采用較為經典的零記憶非線性變換法(ZMNL)進行雜波信號建模,主要考慮Rayleigh分布,高斯譜模型的雜波,產生Rayleigh雜波的原理圖如圖2所示。
圖2 Rayleigh雜波仿真原理圖
雷達噪聲信號的來源十分復雜,包括系統內部噪聲與外部噪聲,這些噪聲共同構成了雷達回波中的噪聲信號。在本文中,將噪聲信號看做高斯白噪聲[5]。
基于以上分析,仿真炸點目標的雷達回波信號,在仿真實驗中,設炸點坐標(6000,1200,0),雷達掃描間隔TS=0.1s,空氣阻力系數k=0.0115,發射信號為脈沖式線性調頻信號,帶寬20MHz,脈沖寬度10μs,載頻為10GHz,脈沖重復周期100μs,采樣率為1.5倍帶寬,噪聲功率為-8dB,雜波功率譜選取高斯模型,概率密度函數參數σ=2。本文所構建炸點回波信號每個脈沖重復周期(PRT)內共有3000個采樣值,先對仿真得到的回波信號進行頻域形式數字脈沖壓縮處理,加入漢明窗,提高脈壓信號主副瓣比,然后對相鄰128個脈沖處于相同距離單元的數據進行MTD處理,得到一個128×3000雷達數據矩陣。
3 炸點目標雙門限檢測算法
炸點目標回波在經過脈沖壓縮、MTD處理后,得到的距離多普勒平面如圖7所示,圖7中展示了炸點爆炸過程中多個時間點回波的具體表現,炸點回波會在爆炸過程中,在多普勒維展寬,根據炸點目標的回波特性,對炸點目標完成第一門限恒虛警檢測后,沿多普勒維對炸點回波進行二進制積累,第二門限值選為K/M,即在M個監測點中,超過第一門限的脈沖數大于等于K時,均判為有信號[8]。
3.1 第一門限恒虛警檢測
對于常規單體目標,其距離多普勒平面呈點狀分布,通過恒虛警檢測算法即可將目標提取出來。而炸點目標速度成分復雜,在多普勒維呈帶狀展寬。圖3為經典恒虛警檢測器流程框圖,圖3中,xi和yi為檢測單元兩側參考單元采樣,參考單元長度為N=2n,X和Y分別是前后背景雜波強度的局部估計[9],以4種CFAR檢測器對炸點目標進行距離維第一門限恒虛警檢測。
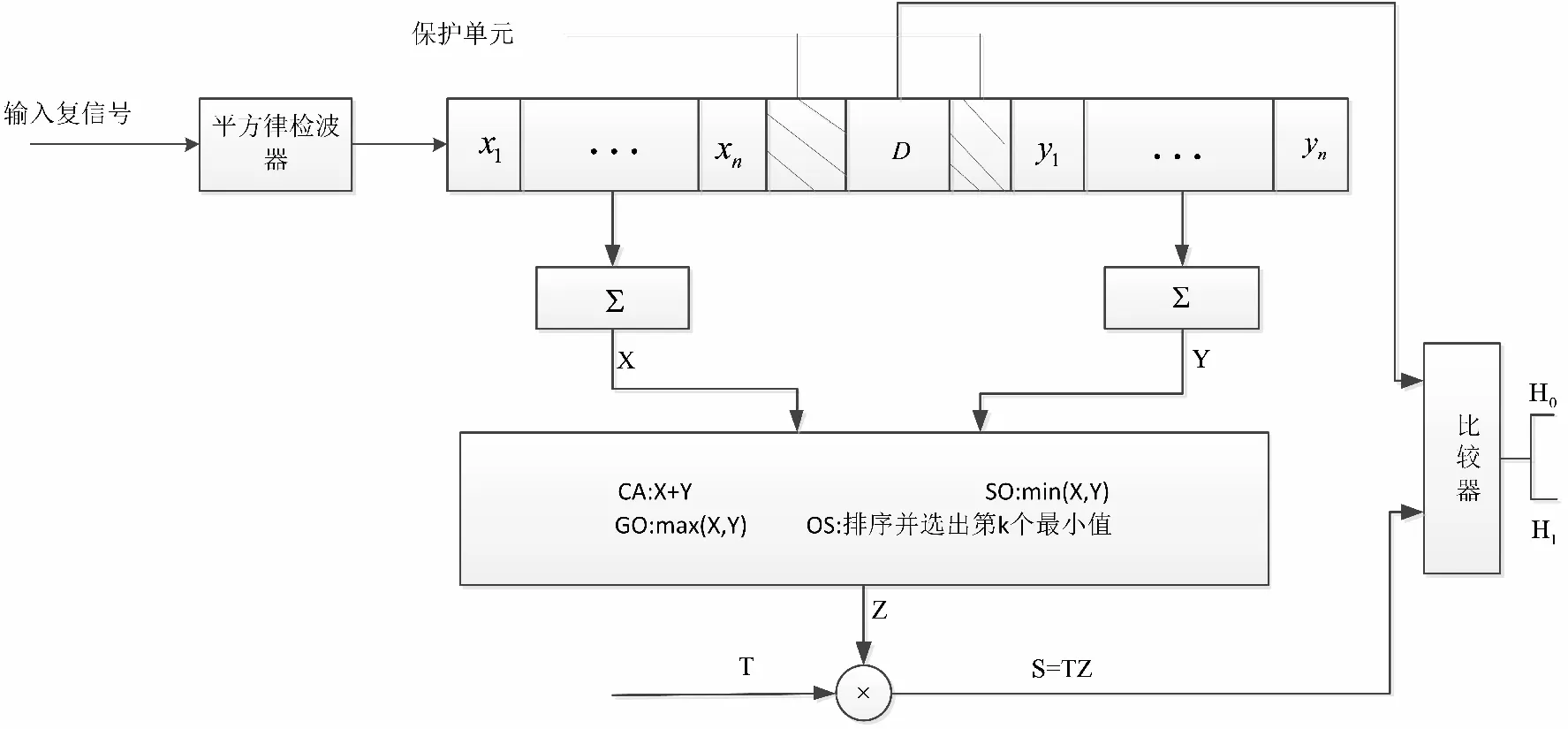
圖3 經典恒虛警檢測器流程框圖
3.2 第二門限二進制積累檢測算法
完成距離維恒虛警檢測后,炸點目標過距離維第一門限后的點在多普勒維呈帶狀密集集中分布(如圖7所示),因此通過二進制積累可有效提高對炸點目標的檢測性能。使用滑窗法對檢測得到的點跡數進行累積,并設置相應的門限值,若累積數目超過門限值,則判定探測到炸點,否則無。
4 仿真結果與實測數據分析
4.1 炸點目標回波仿真結果及分析
選取爆炸剛開始時無噪聲、無雜波的雷達數據矩陣,三維圖像如圖4所示,經分析,在爆炸剛開始時,處于爆炸中心的各點目標速度處于最大值,且相對雷達的徑向速度成分相對復雜,雷達回波中的多普勒成分也十分復雜,而此時,爆炸剛剛開始,回波信號在距離維上的展寬并不明顯,故而呈現在距離維上相對集中,而在多普勒維帶狀展開的寬頻信號模式。
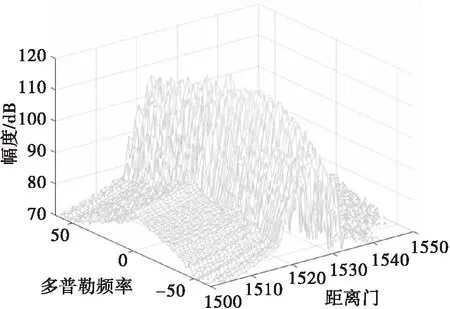
圖4 無噪聲、雜波的炸點回波仿真結果
為驗證模型的有效性,將仿真結果與實測數據進行對比分析,圖5為加入雜波與噪聲后的炸點回波數據矩陣的三維圖像,圖6為實測炸點回波數據,通過兩者對比可以發現,炸點回波仿真結果與實測數據可以較好地吻合。
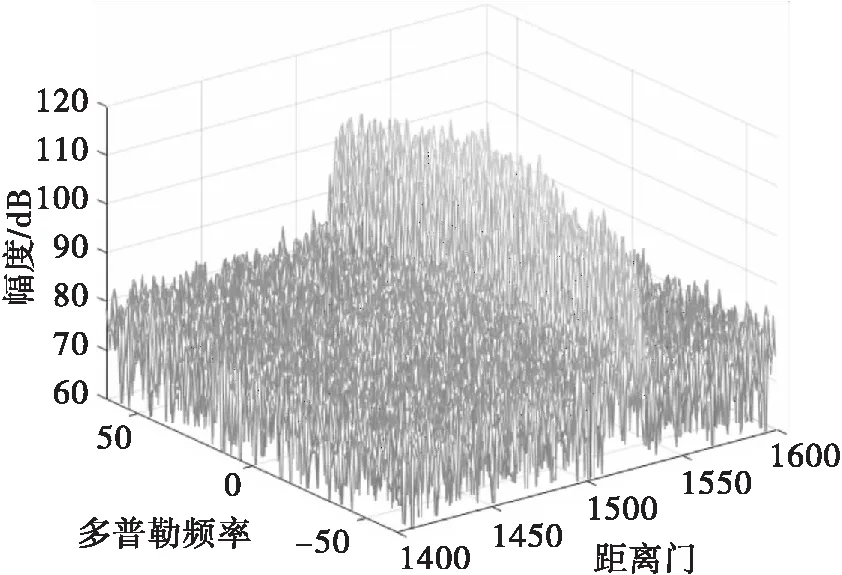
圖5 加入噪聲、雜波的炸點仿真數據
分析炸點爆炸過程,炸點起爆后,隨著時間推移,炸點內部點目標迅速向四周運動,運動過程中同時受到重力和空氣阻力影響,并且炸點內部存在部分高速運動的點目標落地。如圖7所示,為炸點目標的距離多普勒平面的具體表現,圖8為仿真得到的炸點目標距離多普勒平面的動態變化情況,將實測數據與仿真結果進行對比,兩者的變化趨勢大致吻合,理論分析與實測結果一致。
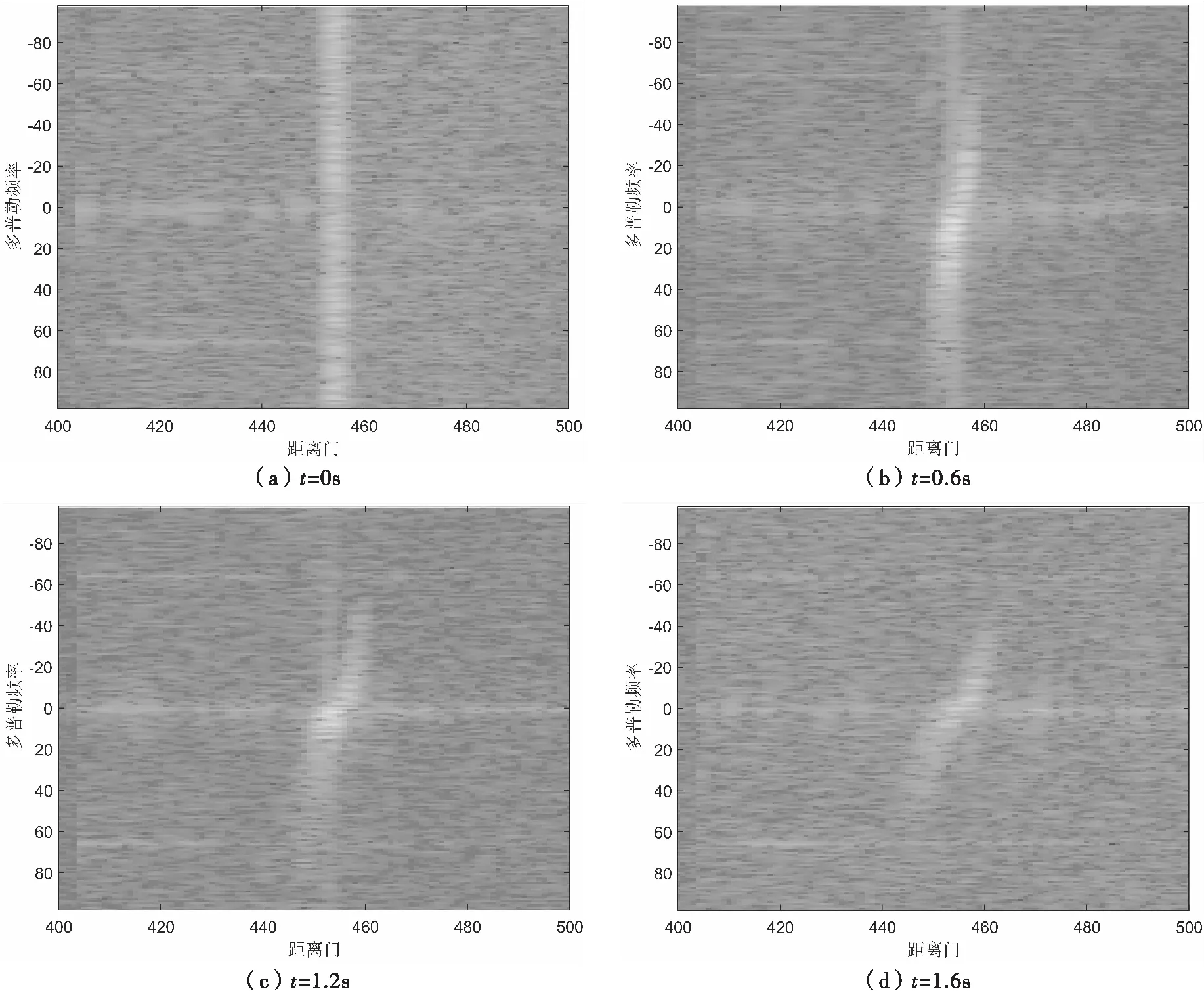
圖7 炸點距離速度變化實測數據
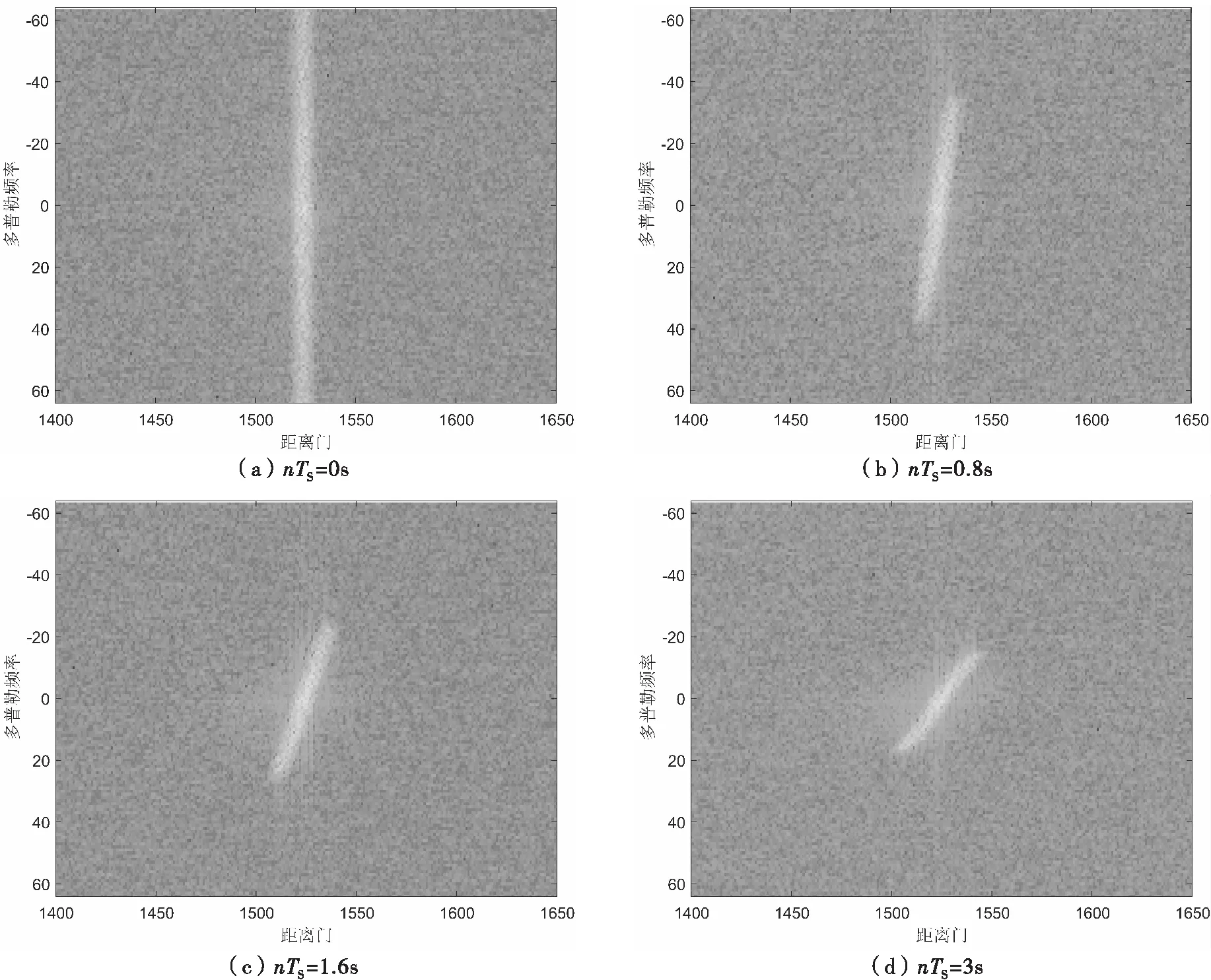
圖8 炸點距離速度變化仿真結果
4.2 炸點目標雙門限檢測算法仿真結果及分析
4.2.1 第一門限檢測算法仿真結果及分析
為了對比4種恒虛警檢測器對炸點目標的檢測性能,設定虛警率Pfa=10-6,保護單元個數2,參考單元個數32,以實測炸點數據進行仿真實驗。表1是t=0s、0.6s、1.6s時4種第一門限恒虛警檢測器對炸點檢測情況的統計結果,為了更直觀地比較不同時間點4中檢測器的檢測結果,圖9、圖10分別給出了4種第一門限檢測器對爆炸過程中點目標與虛警點的檢測結果,從圖中可以看出:SO-CFAR與OS-CFAR檢測器對炸點的檢測性能較好,但SO-CFAR檢測器會引入了較多的虛警點,CA-CFAR和GO-CFAR檢測器雖然引入的虛警較少,但對炸點目標檢測的損失較為嚴重,則OS-CFAR檢測器作為第一門限檢測器檢測性能最優。
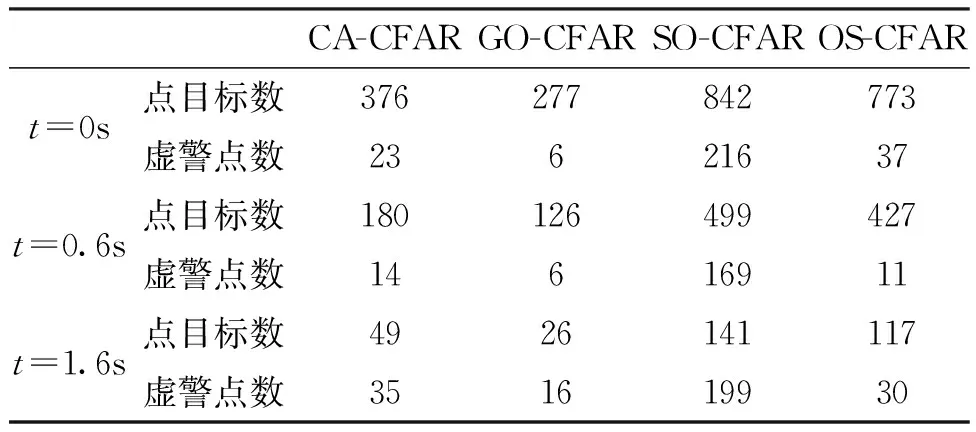
表1 第一門限檢測器檢測結果統計表
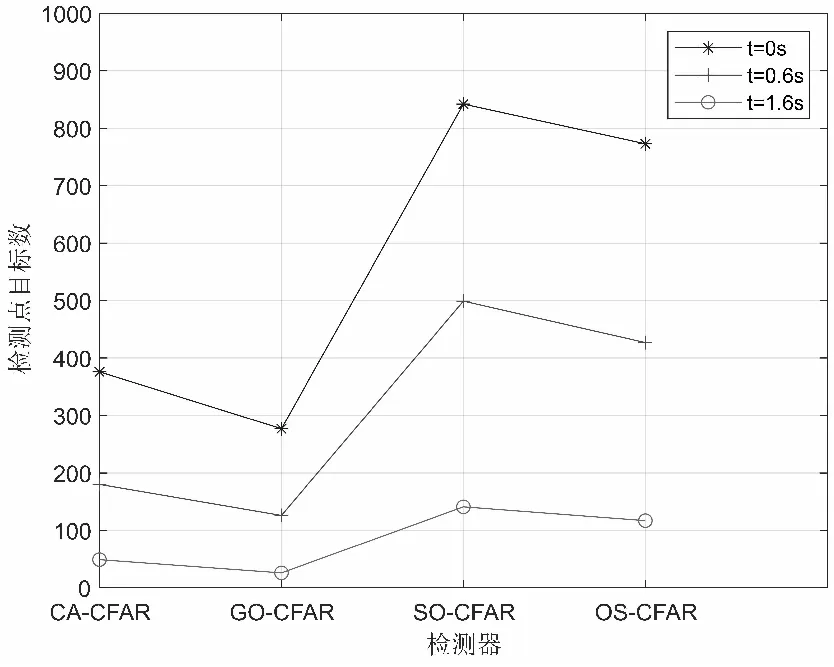
圖9 第一門限檢測器點目標檢測結果
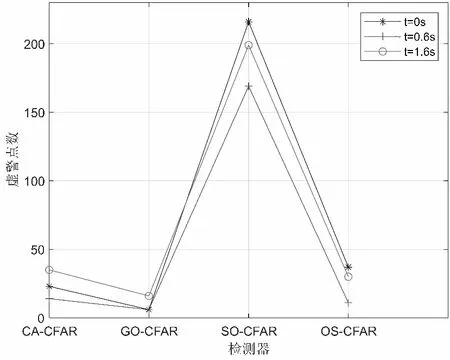
圖10 第一門限檢測器虛警點檢測結果
4.2.2 第二門限檢測算法仿真結果及分析
圖11為t=0s時炸點目標二進制積累后的結果及局部放大圖,從圖11中可以看出炸點目標十分明顯,其中SO-CFAR檢測算法引入了較多的虛警點,從局部放大圖可以看出,4種檢測算法中SO-CFAR與OS-CFAR檢測器的積累點數相對較高。
圖12為t=0.6s時炸點目標二進制積累后的結果及局部放大圖,從圖12中可以看出,相比于爆炸起始瞬間,經過一段時間后,能檢測到的點目標數量有所減少,從局部放大圖可以看出,相比于SO-CFAR和OS-CFAR檢測器,CA-CFAR和GO-CFAR檢測器對炸點目標的檢測損失較大。
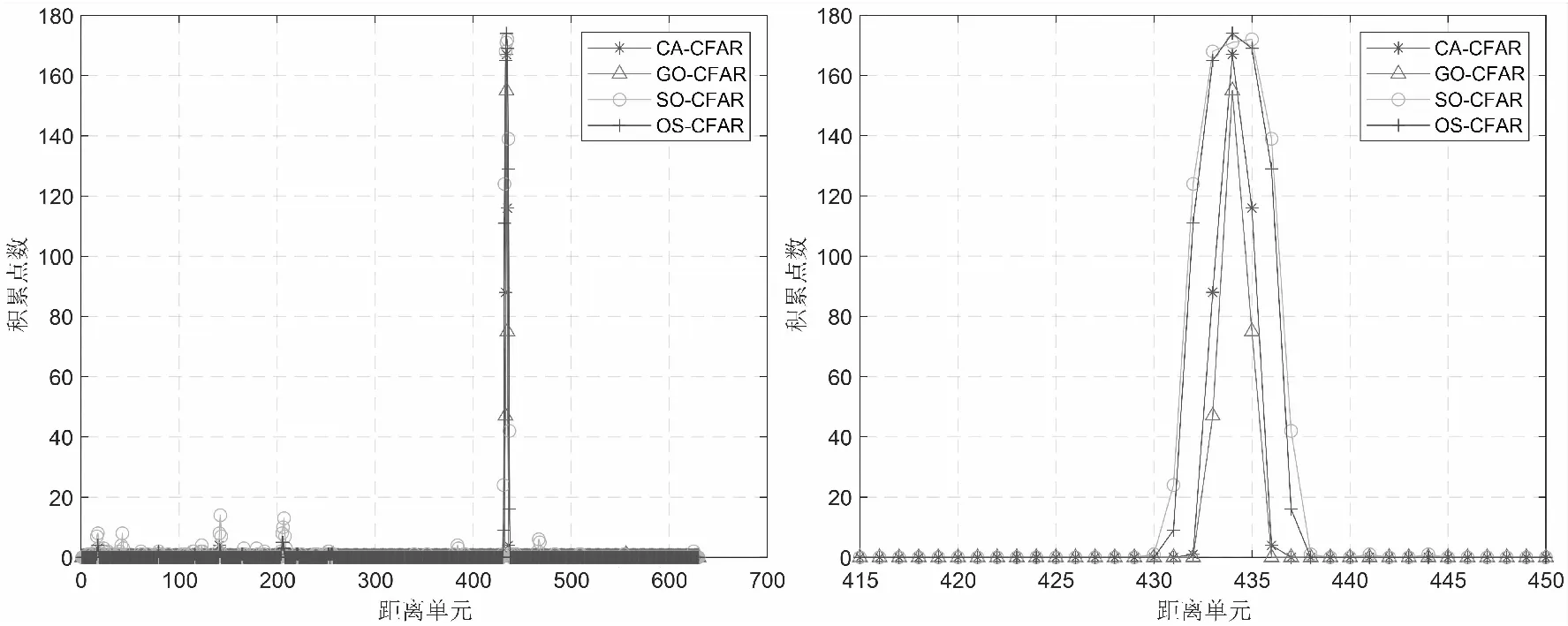
圖11 t=0s時炸點目標二進制積累結果及局部放大圖
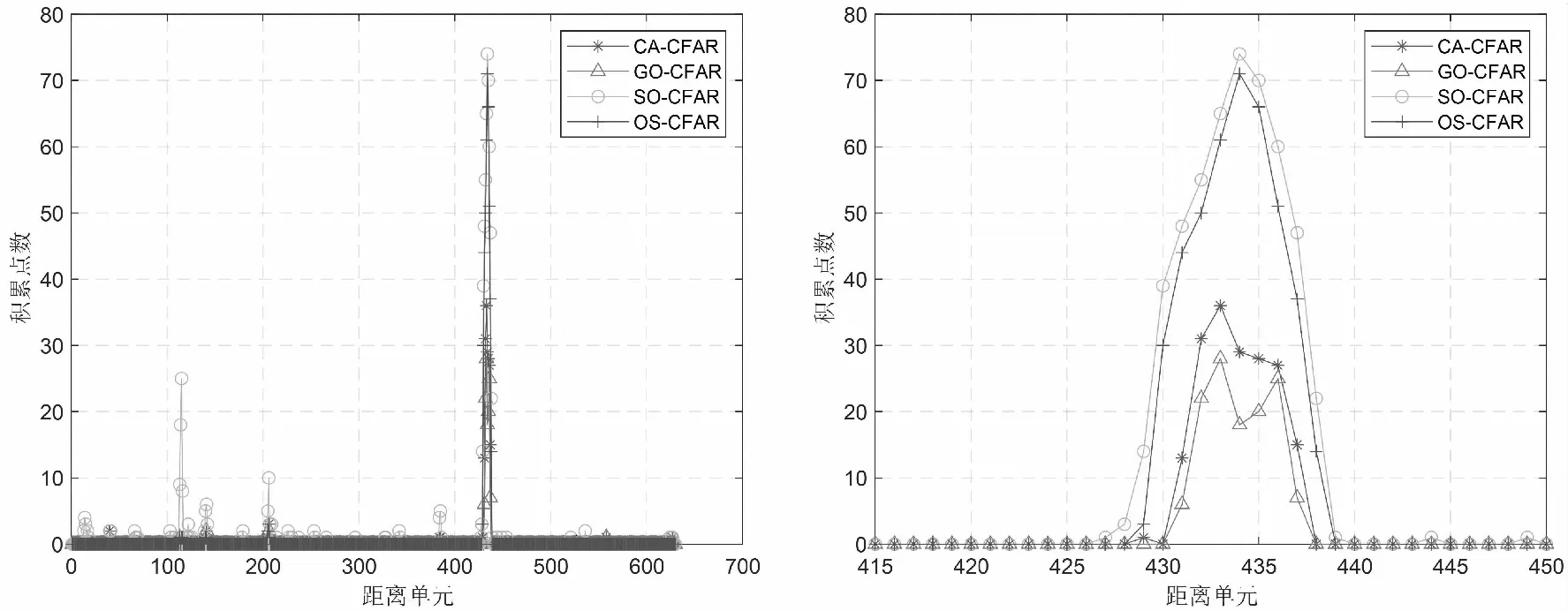
圖12 t=0.6s時炸點目標二進制積累結果及局部放大圖
圖13為t=1.6s時炸點目標二進制積累后的結果及局部放大圖,此時爆炸接近尾聲,采用CA-CFAR和GO-CFAR檢測器雷達探測到的炸點目標與雜波等虛警點的二進制積累結果基本保持一致,對炸點目標難以進行有效探測,而SO-CFAR與OS-CFAR檢測器仍具有相對較好的檢測性能。
基于以上實測數據的二進制積累結果,設一長度為S的滑窗,S應與炸點的目標長度相適應,對滑窗中的點跡數求和,若總數超過門限值,則認為檢測到炸點目標,否則認為沒有檢測到。根據以上的分析結果,考慮到炸點距離擴展長度,設定滑窗長度S=12,炸點檢測門限值為100,圖14(a)為t=0s時炸點目標滑窗積累結果,炸點起爆的瞬間,二進制滑窗積累對炸點目標的檢測具有良好的效果,圖14(b)、圖14(c)分別為t=0.6s,t=1.6s時炸點目標滑窗積累結果,從圖14中可以看出,在爆炸進行過程中,爆炸產生的點目標數目急劇減少,SO-CFAR與OS-CFAR檢測器依舊表現出良好的檢測性能。
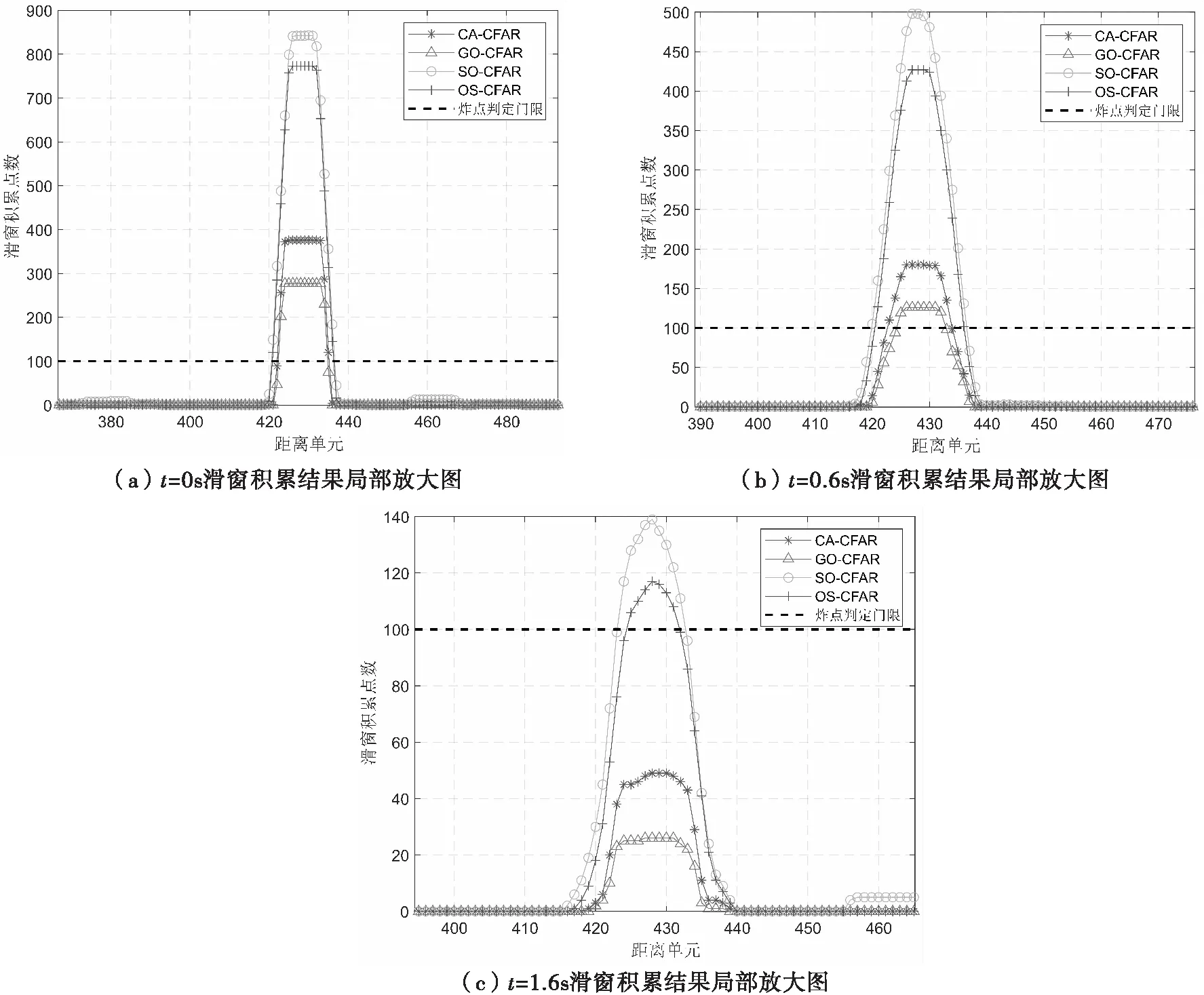
圖14 炸點目標二進制滑窗積累結果
5 結束語
本文對炸點目標回波信號建模與檢測算法作了研究,提出了炸點目標回波模型與炸點目標的雙門限檢測算法。文中構建了炸點爆炸過程的數學模型,將點目標回波進行矢量疊加構成炸點回波信號。通過與實測數據進行對比分析,所建立的炸點回波模型可以較好地模擬出炸點回波;本文根據炸點目標回波特征,提出炸點目標的雙門限檢測算法,并以實測炸點回波數據進行仿真實驗,結果表明:該算法對于炸點目標具有較好的檢測效果。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
