海工產(chǎn)品標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證平臺(tái)
2023-04-04 06:45:22馮洪奎周瑞平
船舶標(biāo)準(zhǔn)化工程師 2023年2期
馮洪奎,周瑞平,陸 劍,李 鍵
(上海海洋工程裝備制造業(yè)創(chuàng)新中心有限公司,上海 201306)
0 引言
產(chǎn)品標(biāo)準(zhǔn)是用于指導(dǎo)產(chǎn)品設(shè)計(jì)、制造、檢驗(yàn)、安裝和使用的準(zhǔn)則。標(biāo)準(zhǔn)的正確與否直接關(guān)系到產(chǎn)品的生產(chǎn)成本和使用安全,有必要重視標(biāo)準(zhǔn)的驗(yàn)證工作。隨著計(jì)算機(jī)仿真技術(shù)的飛速發(fā)展,使用仿真的方法驗(yàn)證標(biāo)準(zhǔn)條款成為標(biāo)準(zhǔn)驗(yàn)證的一種必要手段。標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證通過仿真方法檢驗(yàn)標(biāo)準(zhǔn)的合理性,為標(biāo)準(zhǔn)制定提供依據(jù)。
根據(jù)仿真方法的不同,可將計(jì)算機(jī)仿真劃分為基于硬件在環(huán)(Hardware In Loop,HIL)的半實(shí)物仿真、虛擬現(xiàn)實(shí)仿真、增強(qiáng)現(xiàn)實(shí)仿真、二維圖形仿真等;根據(jù)仿真內(nèi)容的不同,可將計(jì)算機(jī)仿真劃分為產(chǎn)品裝配仿真、生產(chǎn)線調(diào)度仿真、作業(yè)過程仿真、固體力學(xué)仿真、流體力學(xué)仿真、運(yùn)動(dòng)學(xué)仿真、動(dòng)力學(xué)仿真、科學(xué)計(jì)算仿真等。
陳杰等[1]通過ADAMS、Creo、ABAQUS 等商業(yè)軟件建立仿真平臺(tái),在此基礎(chǔ)上提出產(chǎn)品設(shè)計(jì)及工藝的線下仿真驗(yàn)證標(biāo)準(zhǔn)。采用該方式建設(shè)仿真平臺(tái),技術(shù)上比較成熟,結(jié)果比較可靠,但平臺(tái)可擴(kuò)展性不強(qiáng)。王云鋒等[2]對(duì)標(biāo)準(zhǔn)驗(yàn)證模型的指標(biāo)體系進(jìn)行研究,為搭建基于標(biāo)準(zhǔn)驗(yàn)證模型的機(jī)械產(chǎn)品設(shè)計(jì)工藝仿真標(biāo)準(zhǔn)驗(yàn)證平臺(tái)提供依據(jù),但指標(biāo)的有效性仍然需要經(jīng)過大量實(shí)踐進(jìn)行驗(yàn)證。
海工產(chǎn)品種類繁多,其對(duì)應(yīng)的標(biāo)準(zhǔn)也較多,各標(biāo)準(zhǔn)的驗(yàn)證對(duì)象和驗(yàn)證方法均不相同。海工產(chǎn)品標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證平臺(tái)自主搭建通用的海工產(chǎn)品檢驗(yàn)環(huán)境,為部分標(biāo)準(zhǔn)的制定提供依據(jù),該平臺(tái)目前主要側(cè)重對(duì)控制系統(tǒng)和通信系統(tǒng)等相關(guān)標(biāo)準(zhǔn)進(jìn)行仿真驗(yàn)證。
本文搭建海工產(chǎn)品標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證平臺(tái),并采用仿真方法驗(yàn)證海工產(chǎn)品相關(guān)標(biāo)準(zhǔn)制定的合理性。
1 系統(tǒng)架構(gòu)方案
海工產(chǎn)品標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證平臺(tái)系統(tǒng)架構(gòu)如圖1 所示,主要包括輸入、建模與仿真、仿真數(shù)據(jù)分析和輸出。該平臺(tái)建立的模型主要包括控制模型、通信模型、海洋平臺(tái)運(yùn)動(dòng)模型、船舶運(yùn)動(dòng)模型、管理系統(tǒng)模型、電力系統(tǒng)模型、推進(jìn)系統(tǒng)模型、傳感系統(tǒng)模型、位置參照系統(tǒng)模型、環(huán)境載荷模型、作業(yè)載荷模型等。利用這些模型對(duì)船舶與海洋平臺(tái)相關(guān)標(biāo)準(zhǔn)進(jìn)行驗(yàn)證。
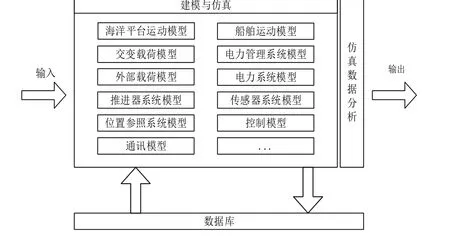
圖1 海工產(chǎn)品標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證平臺(tái)系統(tǒng)架構(gòu)圖
2 驗(yàn)證實(shí)例
2.1 標(biāo)準(zhǔn)條款
動(dòng)力定位(Dynamic Positioning,DP)系統(tǒng)[3-6]是一種重要的閉環(huán)控制系統(tǒng),用于將船舶或海洋平臺(tái)保持在較小范圍內(nèi)運(yùn)動(dòng)。DP 系統(tǒng)可根據(jù)采集的環(huán)境參數(shù)和位置參數(shù)自動(dòng)進(jìn)行計(jì)算,根據(jù)計(jì)算結(jié)果控制各推進(jìn)器的推力大小,盡可能使船舶或海洋平 臺(tái)的艏向和船位保持不變。對(duì)DP 系統(tǒng)相關(guān)標(biāo)準(zhǔn)進(jìn)行仿真測(cè)試驗(yàn)證具有重要意義,本文選擇標(biāo)準(zhǔn)T/CSNAME 008—2020 中提出的DP 控制系統(tǒng)的HIL 仿真系統(tǒng)框架結(jié)構(gòu)(見圖2)進(jìn)行驗(yàn)證[7]。HIL仿真系統(tǒng)可以在脫離真實(shí)船舶及海洋平臺(tái)作業(yè)環(huán)境的情況下對(duì)DP 系統(tǒng)的故障進(jìn)行檢測(cè)。

圖2 HIL 仿真系統(tǒng)框架結(jié)構(gòu)
2.2 HI L 仿真系統(tǒng)開發(fā)
為驗(yàn)證標(biāo)準(zhǔn)T/CSNAME 008—2020 中提出的DP 控制系統(tǒng)的HIL 仿真系統(tǒng)框架結(jié)構(gòu)是否正確,需要根據(jù)該標(biāo)準(zhǔn)條款提出的系統(tǒng)框架對(duì)HIL仿真系統(tǒng)進(jìn)行開發(fā)。若開發(fā)出的系統(tǒng)能成功實(shí)現(xiàn)仿真測(cè)試,則說明標(biāo)準(zhǔn)條款的內(nèi)容是合理的,否則說明該標(biāo)準(zhǔn)條款的內(nèi)容存在問題,需要進(jìn)一步修改。
根據(jù)標(biāo)準(zhǔn)條款搭建仿真系統(tǒng),仿真系統(tǒng)中的船舶電力仿真系統(tǒng)模型見圖3。其中:SM_gen1 子系統(tǒng)包括2 臺(tái)柴油發(fā)電機(jī)、7 臺(tái)變壓器、2 臺(tái)12 脈沖變頻器、1 臺(tái)24 脈沖變頻器和3 臺(tái)推進(jìn)電機(jī);SM_gen2子系統(tǒng)包括2臺(tái)柴油發(fā)電機(jī)、8臺(tái)變壓器、4 臺(tái)12 脈沖變頻器和4 臺(tái)推進(jìn)電機(jī);SM_gen3 子系統(tǒng)包括2 臺(tái)柴油發(fā)電機(jī)、7 臺(tái)變壓器、2 臺(tái)12 脈沖變頻器、1 臺(tái)24 脈沖變頻器和2 臺(tái)推進(jìn)電機(jī)。圖3中:Ts表示采樣時(shí)間;Trigger 表示觸發(fā)信號(hào)接口;Brk 表示斷開信號(hào)接口;SS0表示串口0 接口;SS1表示串口1 接口;SS2表示串口2 接口;Cmd 表示命令接口;Send 表示發(fā)送信號(hào)接口;Recv 表示接收信號(hào)接口;Status 表示狀態(tài)信號(hào)接口;Over 表示過載信號(hào)接口;Ai、Bi、Ci(i=1, 2, 3,…, 7)表示三相交流電的A 相、B 相、C 相電的參數(shù)接口。
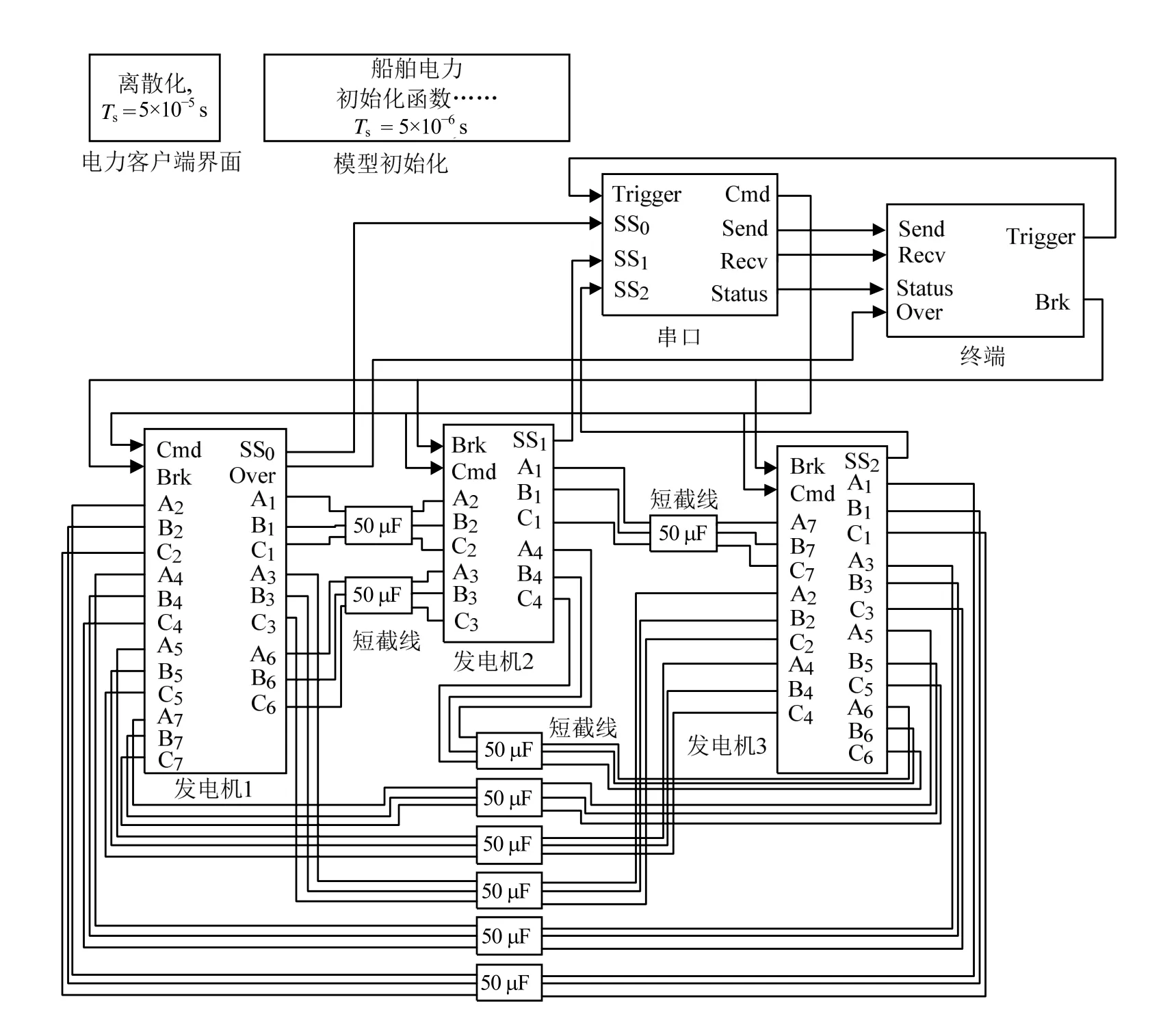
圖3 船舶電力系統(tǒng)仿真模型
失效模式仿真示意圖見圖4,分別在母線、推進(jìn)變壓器進(jìn)線端及母聯(lián)電纜上選取故障點(diǎn)K1、K2和K3進(jìn)行三相短路試驗(yàn)。圖4 中:brk1~brk7表示電閘,G 表示發(fā)電機(jī),M 表示推進(jìn)電機(jī),K1、K2和K3表示故障點(diǎn)。海洋平臺(tái)為海上鉆井、采油、集運(yùn)、觀測(cè)、導(dǎo)航、施工等活動(dòng)提供生產(chǎn)和生活設(shè)施。海洋平臺(tái)的工作環(huán)境惡劣,不僅有風(fēng)、浪、流等復(fù)雜外部載荷的作用,還會(huì)受到交變作業(yè)載荷的影響。在海洋平臺(tái)相關(guān)標(biāo)準(zhǔn)的制定過程中,涉及對(duì)風(fēng)、浪、流等外部載荷的描述,為驗(yàn)證這些描述是否正確,需要建立動(dòng)力定位仿真驗(yàn)證平臺(tái),該平臺(tái)包括船體模塊、環(huán)境干擾模塊、濾波模塊、控制器模塊和推力分配模塊。

圖4 失效模式仿真示意圖
DP 系統(tǒng)仿真模型見圖5。圖5 中:w 表示線性二階波譜的輸入?yún)?shù);s 表示拉普拉斯算子;posw表示船舶縱蕩噪聲和橫蕩噪聲組成的數(shù)組;xw表示船舶縱蕩的噪聲大小;yw表示船舶橫蕩的噪聲大小;psiw表示船舶艏向的噪聲大小;psi 表示根據(jù)船舶運(yùn)動(dòng)模型計(jì)算得到的艏向大小;y 表示模擬的船舶運(yùn)動(dòng)的位置與艏向組成的數(shù)組;該模擬值等于船舶運(yùn)動(dòng)模型計(jì)算得到的位置、艏向與相應(yīng)噪聲的和;y3表示船舶運(yùn)動(dòng)模型計(jì)算得到的艏向值psi 與艏向噪聲psiw的和;xd表示船舶初始位置沿縱向方向的大小;yd表示船舶初始位置沿橫向方向的大小;psid表示船舶艏向的初始大小;etaref為船舶的初始位置和初始艏向組成的數(shù)組;eta 表示根據(jù)船舶運(yùn)動(dòng)模型計(jì)算得到的船舶運(yùn)動(dòng)的位置和艏向組成的數(shù)組;nu表示根據(jù)船舶運(yùn)動(dòng)模型計(jì)算得到的船舶縱向、橫向、艏向速度大小組成的數(shù)組,τ表示船舶推進(jìn)器的扭矩大小;etaw表示慣性導(dǎo)航仿真器測(cè)量到的船舶運(yùn)動(dòng)位置噪聲與艏向噪聲組成的數(shù)組;psw表示慣性導(dǎo)航仿真器測(cè)量到的船舶艏向噪聲大小;D 表示度轉(zhuǎn)弧度;R 表示弧度轉(zhuǎn)度;u(3)表示取數(shù)組的第3 維數(shù)據(jù)。

圖5 DP 系統(tǒng)仿真模型
2.3 DP 控制系統(tǒng)的HIL 測(cè)試
建立DP 控制系統(tǒng),并通過相關(guān)設(shè)備運(yùn)行數(shù)據(jù)來采集數(shù)學(xué)模型參數(shù)。將HIL 仿真系統(tǒng)與現(xiàn)場(chǎng)設(shè)備(被測(cè)系統(tǒng))連接,為現(xiàn)場(chǎng)設(shè)備提供真實(shí)信號(hào),并開始進(jìn)行測(cè)試。DP 控制系統(tǒng)的HIL 測(cè)試系統(tǒng)總體架構(gòu)見圖6。試驗(yàn)平臺(tái)的電力系統(tǒng)、推進(jìn)系統(tǒng)、傳感器和位置參考系統(tǒng)的參數(shù)配置完全根據(jù)項(xiàng)目實(shí)際進(jìn)行選取,在貼近真實(shí)環(huán)境下對(duì)DP 控制系統(tǒng)的設(shè)計(jì)理念、功能性、失效處理能力等進(jìn)行測(cè)試評(píng)估。

圖6 HIL 測(cè)試系統(tǒng)總體結(jié)構(gòu)
3 標(biāo)準(zhǔn)驗(yàn)證結(jié)果
3.1 失效模式仿真
分別在母線、推進(jìn)變壓器進(jìn)線端及母聯(lián)電纜上選取故障點(diǎn)K1、K2和K3進(jìn)行三相短路試驗(yàn)。當(dāng)K1短路時(shí),同步發(fā)電機(jī)差動(dòng)保護(hù),brk1 跳閘;當(dāng)K2短路時(shí),推進(jìn)電機(jī)變壓器過流保護(hù),brk4 跳閘;當(dāng)K3短路時(shí),母聯(lián)方向比較式縱聯(lián)保護(hù),brk6 和brk7跳閘。仿真試驗(yàn)表明:當(dāng)HIL 系統(tǒng)發(fā)生三相短路故障時(shí),可將故障有效隔離,選擇性較好。
3.2 DP 系統(tǒng)仿真
在仿真測(cè)試過程中,DP 控制系統(tǒng)接收環(huán)境載荷、船舶運(yùn)動(dòng)參數(shù)、船舶位置、推進(jìn)器狀態(tài)、電網(wǎng)狀態(tài)等信息,并輸出相應(yīng)的指令至推進(jìn)器系統(tǒng)。在不同風(fēng)、浪、流的擾動(dòng)情況下,DP 控制系統(tǒng)能夠自動(dòng)控制艏向,使船體與定義運(yùn)動(dòng)軌跡間的偏差保持在合理范圍內(nèi)。DP 控制系統(tǒng)與三維視景仿真系統(tǒng)的數(shù)據(jù)可進(jìn)行實(shí)時(shí)交互(見圖7),以便多視角、多維度地進(jìn)行仿真測(cè)試。結(jié)果表明:根據(jù)標(biāo)準(zhǔn)T/CSNAME 008—2020 中提出系統(tǒng)結(jié)構(gòu)開發(fā)的HIL仿真系統(tǒng)能成功實(shí)現(xiàn)仿真測(cè)試,標(biāo)準(zhǔn)條款的內(nèi)容是合理的。

圖7 DP 控制系統(tǒng)與3D 視景仿真系統(tǒng)的實(shí)時(shí)交互
4 結(jié)論
本文搭建了海工產(chǎn)品標(biāo)準(zhǔn)仿真試驗(yàn)驗(yàn)證平臺(tái),建立了控制系統(tǒng)和通信系統(tǒng)的模型,并對(duì)模型進(jìn)行了測(cè)試。研究結(jié)果表明:根據(jù)標(biāo)準(zhǔn)T/CSNAME 008—2020 中提出系統(tǒng)結(jié)構(gòu)開發(fā)的HIL 仿真系統(tǒng)能成功實(shí)現(xiàn)仿真測(cè)試,標(biāo)準(zhǔn)條款的內(nèi)容是合理的。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
當(dāng)代陜西(2019年8期)2019-05-09 02:22:48
動(dòng)漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19

- 船舶標(biāo)準(zhǔn)化工程師的其它文章
- 意大利船級(jí)社(RINA)發(fā)布 《海事核裝置應(yīng)用指南》
- 日本船級(jí)社(NK)發(fā)布 《大容量蓄電池指南》(第2 版)
- 勞氏船級(jí)社(LR)更新船用鍛鑄件要求
- 法國(guó)船級(jí)社(BV)發(fā)布 《智能船符號(hào)規(guī)范》(R02 版)
- 法國(guó)船級(jí)社(BV)發(fā)布 《海上設(shè)施網(wǎng)絡(luò)安全規(guī)范》(R02 版)
- 法國(guó)船級(jí)社(BV)發(fā)布 《狀態(tài)監(jiān)測(cè)系統(tǒng)規(guī)范》