公路病害精準檢測機器人在工程中的應用
2023-04-04 08:12:22劉憲明鐘新然
科技創新與應用 2023年9期
劉憲明,閆 晨,楊 睿,鐘新然*
(1.山東高速工程檢測有限公司,濟南 250003;2.山東高速股份有限公司,濟南 250014;3.上海圭目機器人有限公司,上海 200433)
公路是支持國家經濟發展與社會進步的重要基礎設施,隨著近幾十年國民經濟的快速發展,國家在道路建設方面的投資已逐漸趨于頂峰,從而整個交通行業即將面臨由“建”轉“養”的格局變化。隨著公路運行時間及交通荷載的增長,公路表觀和內部結構病害發展趨勢加快,而大多數行車事故都直接或間接因道路病害長期積累與惡化而致,同時大量高能耗、高成本的公路維修工程也是因為道路病害惡化而被動實施,造成大量的資金和人力資源浪費。目前,傳統的公路檢測手段主要依賴人工(人工目視、人工手持儀器檢測)、半自動(車載儀器檢測)手段,存在著效率低、主觀性強、工作強度大、數據精度差等諸多問題。因此,實現更高效、更精準地病害檢測對公路狀況評價、維修養護決策具有重要意義。
近年來,國內外學者及工程師對公路病害自動化檢測技術進行了大量的研究及實踐探索。崔國麗[1]提出了基于立體的交向拍攝測量結構的公路路面損壞裂縫自動檢測技術,通過立體雙目相機交向拍攝測量,獲取路面裂縫病害信息。黃建斌[2]針對高速公路路面檢測速度較慢的問題,以線陣相機作為核心,實時獲取高速公路破損原始數據,并通過光照均勻化、交通標記線去除等圖像預處理算法,實現病害檢測。周游佳等[3]研發了基于三維檢測技術的道路綜合檢測車,可快速采集路面灰度圖像和橫斷面三維高程數據并識別裂縫、車轍、坑槽等常見公路表觀病害。龐靜等[4]研制了基于車載攝像頭的高速公路病害自動檢測系統,并利用深度學習技術進行公路表觀病害的自動檢測及分類,并通過云端管理系統進行病害管理、統計及規劃,提升高速公路病害檢測及管理的效率及準確度。此外,加拿大FURGO ROADWARE 系統、澳大利亞ARRB 系統、美國DHDV 和PATHWWAY 系統[5]、中國的CiCs[6]等產品化的公路綜合檢測車也開始逐步應用于公路檢測作業。總體而言,目前已有的大多數公路病害自動檢測技術都是依托車載檢測裝備,相較于人工作業方式其檢測效率已有顯著提高,但在自動化程度、數據密度和數據定位精度上還有待進一步提升。
為了進一步提升自動化、智能化的公路病害精準檢測水平,本文依托公路智能檢測機器人系統,利用搭載的相機和三維地質雷達模塊自動采集公路路面表觀與內部結構數據,從而實現公路全結構、全斷面的精準病害檢測。依托山東省內某國道公路檢測項目開展現場測試及工程應用,驗證技術有效性。
1 公路病害檢測機器人系統
公路病害檢測機器人系統架構如圖1 所示,機器人系統由數據采集作業系統、數據處理與信息管理系統、遠程監控與輔助系統組成。數據采集作業系統包括四轉四驅智能機器人平臺、表觀視覺檢測模塊、三維探地雷達檢測模塊、任務規劃器、機器人遙控器和機器人遠程監控系統。數據處理與信息管理系統包括數據處理與病害分析軟件、路面病害信息管理軟件。遠程監控與輔助系統包括多功能運輸車、遠程控制臺。
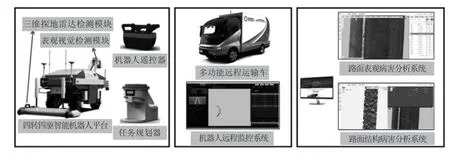
圖1 道路檢測機器人系統總覽
在道路檢測任務中,檢測機器人以自主檢測作業的方式,利用搭載的表觀視覺檢測模塊及三維探地雷達檢測模塊分別采集檢測區域內的道路表觀圖像和內部結構數據,并結合高精度定位信息生成檢測區域道路表觀和內部結構三維模型。最后,數據分析工程師依據JTG 5210—2018《公路技術狀況評定標準》[7]并結合基于深度學習的病害識別算法進行檢測數據分析,可直觀、快速獲取道路表觀及內部結構病害。
2 基于公路病害檢測機器人的現場應用技術
2.1 現場作業流程
為了保證公路病害檢測機器人正常開展作業,制定了詳細的現場作業流程,如圖2 所示。在現場踏勘、確認檢測區域后,現場作業工程師確認交通組織及封路正常,即可開始現場作業。現場工程師根據作業區域實際面積,采集檢測區域坐標并在遠程監控系統中設置檢測任務,隨后將該檢測任務發布到機器人平臺。現場工程師在機器人作業過程中可通過遠程監控系統查看機器人當前的工作狀態和數據采集狀況。任務結束后,確認數據采集完整即可回收設備,撤離現場。
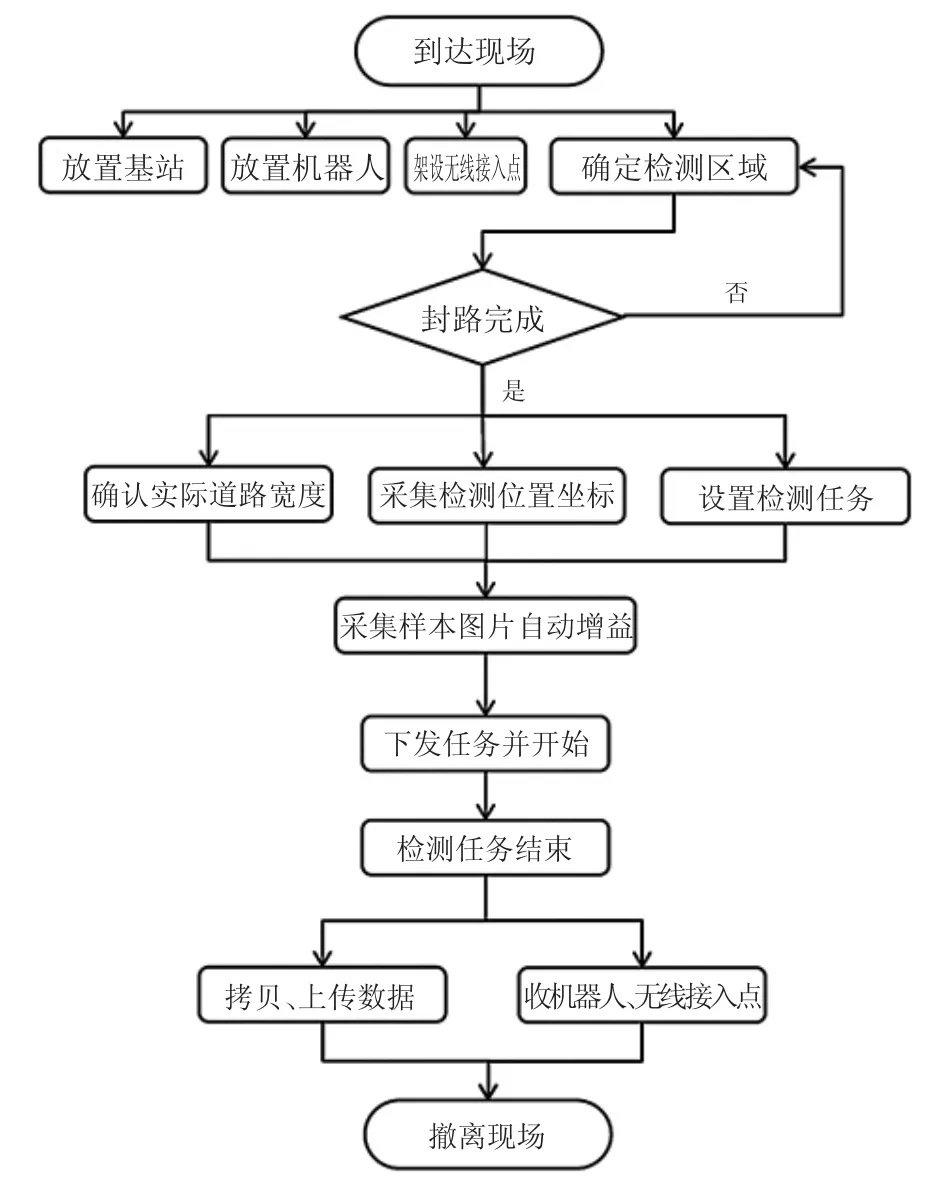
圖2 現場作業流程圖
2.2 公路路面結構數字化實景建模
現場檢測工作結束后,將采集的圖像及雷達數據輸入數據處理與信息管理系統,利用圖像拼接算法一鍵生成整體公路路面實景圖,如圖3 所示。

圖3 道路數字化建模
此外,利用位置對齊的圖像和探地雷達數據,可實現對路面同一位置的表觀病害和內部結構病害融合分析。
2.3 公路病害分析及評價方法
2.3.1 表觀病害分析及評價
在實景模型上鑒別路面損壞類型,利用病害圈定功能標注病害。系統自動統計病害類型、病害編號、損壞程度、病害尺寸和病害坐標等。表觀病害觀測精度±1 mm。評價指標參照JTG 5210—2018《公路技術狀況評定標準》。
2.3.2 內部結構病害評價
基于探地雷達波特征的地下病害的識別方法一般是根據正演規律推斷某些病害特征的波形、振幅、相位與頻率的變化等,然后根據現場探測得到的波來反演路面內部形態,輔以水平切片的直觀形態,對結構病害做精確、詳盡地判斷[8]。
依據JGJ 437—2018《城市地下病害體綜合探測與風險評估技術標準》[9],脫空、空洞、富水體、裂縫和沉陷不分影響程度,僅有疏松體分為“一般”和“嚴重”2 個等級。
3 公路檢測現場驗證及工程應用
3.1 工程背景及工程概況
本工程主要檢測路段為山東省內G104 國道某路段,K558+660~K558+900 下行行車道,其中有跨線橋跳過40 m,K552+500~K552+750 上行行車道,共計450 m,檢測面積為1 580 m2,檢測區域如圖4 所示。針對該區域路段開展智能機器人自動病害檢測試驗,測量表觀病害位置和尺寸信息作為基準,將機器人檢測結果中表觀病害信息進行對比,驗證其結果準確性。機器人現場作業情況如圖5 所示。

圖4 檢測路段

圖5 機器人現場作業情況
3.2 現場檢測結果
3.2.1 路面表觀病害檢測
本次檢測路段的2 個區域分別為水泥混凝土路面和瀝青路面,表1、表2 分別為2 個區域的路面表觀病害詳細調查結果統計。

表1 G104 調查區域K552+500~K552+750 段路面損壞統計表

表2 G104 調查區域K558+660~K558+900 段路面損壞統計表
其中,水泥混凝土路面檢測出路面損壞45 處,損壞類型包括破碎板、裂縫、邊角剝落。其中破碎板面積為315.448 m2。瀝青路面檢出路面損壞60 處,損壞類型包括龜裂、塊狀裂縫、縱向裂縫、橫向裂縫,路面損壞總長度為79.57 m。檢出縱向裂縫17 處,面積為44.253 m2;檢出橫向裂縫41 處,總面積為35.317 m2;塊狀裂縫面積為17.628 m2,龜裂面積極小。依據規范要求,裂縫類、條狀修補檢測結果應用影響寬度(0.2 m)換算成損壞面積。經現場工程師分析比對,檢測結果與路面實際狀況吻合。
3.2.2 路面內部結構病害檢測
經過探地雷達數據和表觀圖像融合分析,本次檢測路段共檢出結構病害31 處,損壞的類型為疏松、裂縫、脫空、沉陷。裂縫分布于底基層,總面積為13.820 m2;脫空分布在面層、基層、底基層,總面積為16.791 7 m2;疏松分布在底基層和土基,總面積51.713 1 m2。沉陷分布在底基層和土基,總面積58.901 1 m2。結構病害的統計結果見表3。
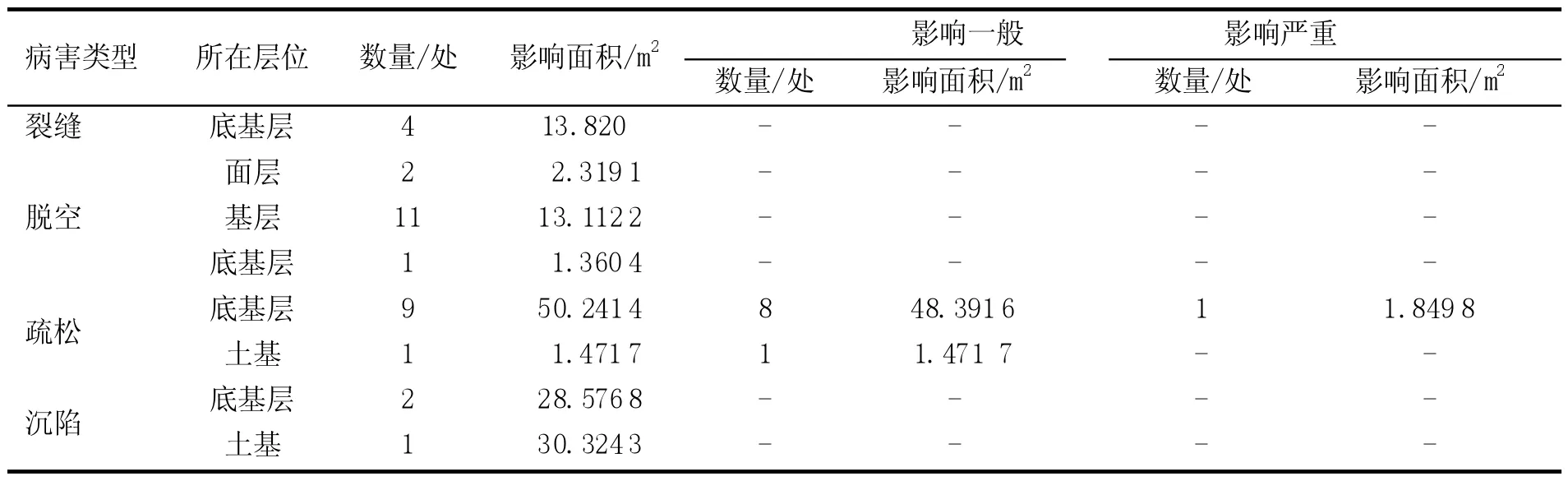
表3 G104 調查區域結構病害統計表
4 結束語
公路病害檢測機器人具有自動采集數據、自主定位導航、全覆蓋的特點,在實際作業中無需人工操作控制,2 名現場工程師即可完成現場作業。公路病害檢測機器人搭載的路面表觀視覺檢測模塊和三維探地雷達模塊可以實現全覆蓋、全結構的路面數據采集,為路面表觀病害和內部結構病害分析提供了高質量、高精度、位置對齊的檢測數據。此外,利用數據處理與信息管理系統可以實現路面數字化實景建模及各類病害的原位繪制與詳情統計,有助于管理單位對路面技術狀況進行研判,并為后續維修養護決策提供數據支撐。依托山東省內的國省道公路檢測項目,基于機器人的公路病害精準檢測技術得到了測試驗證和工程應用,進一步證實了該技術的有效性和先進性。
猜你喜歡
商品與質量(2021年43期)2022-01-18 05:31:32
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
石油瀝青(2021年4期)2021-10-14 08:50:40
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
人民交通(2019年16期)2019-12-20 07:04:10
中國公路(2017年12期)2017-02-06 03:07:33
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12