高軌遙感衛(wèi)星持續(xù)跟蹤多個(gè)動(dòng)目標(biāo)的任務(wù)規(guī)劃方法
2023-04-03 10:11:02劉云鶴
航天器工程 2023年1期
關(guān)鍵詞:規(guī)劃
劉云鶴
(中國(guó)空間技術(shù)研究院遙感衛(wèi)星總體部,北京 100094)
隨著航天科技的發(fā)展,我國(guó)發(fā)射了世界第1顆面向?qū)Φ赜^測(cè)的高軌中高分辨率光學(xué)遙感衛(wèi)星。由于對(duì)地觀測(cè)的任務(wù)要求不斷提高,高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤的任務(wù)規(guī)劃也成為了急需解決的問(wèn)題。然而,傳統(tǒng)遙感衛(wèi)星對(duì)地觀測(cè)的任務(wù)規(guī)劃大多為低軌遙感衛(wèi)星對(duì)靜止目標(biāo)的任務(wù)規(guī)劃[1-2]。其任務(wù)規(guī)劃方法可以分為兩類。第一類采用精確求解的思想,將遙感衛(wèi)星對(duì)地觀測(cè)的任務(wù)規(guī)劃問(wèn)題構(gòu)造成整數(shù)規(guī)劃問(wèn)題,用分支定界或者分支定價(jià)的方法來(lái)求解整數(shù)規(guī)劃問(wèn)題。例如文獻(xiàn)[3]中考慮到云層的不確定性,建立了衛(wèi)星前攝式觀測(cè)的期望調(diào)度模型,基于丹齊格-沃爾夫(Dantzig-Wolfe)分解,利用分支定價(jià)方法解決整數(shù)規(guī)劃問(wèn)題。文獻(xiàn)[4]中考慮到云層的不確定性及數(shù)據(jù)傳輸約束,將對(duì)地觀測(cè)的任務(wù)規(guī)劃問(wèn)題構(gòu)造成線性的整數(shù)規(guī)劃問(wèn)題,最后利用商業(yè)求解器求解,在求解效率和求解精度上都得到了非常好的效果。另外一類研究將遙感衛(wèi)星的調(diào)度問(wèn)題視為多項(xiàng)式復(fù)雜程度的非確定性問(wèn)題(NP)難的問(wèn)題,構(gòu)造了如車(chē)輛路徑規(guī)劃(VRP)模型、圖論模型[5]及生產(chǎn)車(chē)間調(diào)度(Flow-shop)模型[3]。利用非精確解法(如啟發(fā)式算法[6-8]、元啟發(fā)式算法及基于機(jī)器學(xué)習(xí)[9]方法)求解。文獻(xiàn)[5]中將高約束的非線性整數(shù)規(guī)劃問(wèn)題分解為主問(wèn)題(Master Problem)和子問(wèn)題(Subproblem)。將Subproblem構(gòu)造成圖論模型并解決路徑規(guī)劃問(wèn)題。文獻(xiàn)[10]中簡(jiǎn)化了衛(wèi)星的能量約束、儲(chǔ)存約束及時(shí)間約束,將對(duì)地觀測(cè)調(diào)度問(wèn)題簡(jiǎn)化為車(chē)間調(diào)度問(wèn)題。
上述研究的共同特點(diǎn)在于觀測(cè)目標(biāo)是靜止的,并且為低軌遙感衛(wèi)星。高軌遙感衛(wèi)星對(duì)單個(gè)動(dòng)目標(biāo)的任務(wù)規(guī)劃也有一些相關(guān)研究。例如,文獻(xiàn)[8]中利用數(shù)據(jù)驅(qū)動(dòng)的方法對(duì)動(dòng)目標(biāo)的運(yùn)動(dòng)進(jìn)行了預(yù)測(cè),之后建立低軌遙感衛(wèi)星對(duì)動(dòng)目標(biāo)成像的任務(wù)規(guī)劃模型,并且利用遺傳算法求解。文獻(xiàn)[11]中提出了高軌遙感衛(wèi)星對(duì)單個(gè)動(dòng)目標(biāo)觀測(cè)的任務(wù)規(guī)劃方案,方案通過(guò)九宮格跟蹤算法實(shí)現(xiàn)對(duì)單個(gè)動(dòng)目標(biāo)的觀測(cè)及跟蹤。文獻(xiàn)[12]中設(shè)計(jì)了光學(xué)遙感衛(wèi)星對(duì)海上目標(biāo)的搜索方案。但是到目前為止,高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤的任務(wù)規(guī)劃研究尚未進(jìn)行。
基于此,本文提出了高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤的任務(wù)規(guī)劃方法,該方法可實(shí)現(xiàn)對(duì)多個(gè)動(dòng)目標(biāo)的全面跟蹤觀測(cè),并且可以有效減少姿態(tài)機(jī)動(dòng)次數(shù),盡可能地實(shí)現(xiàn)對(duì)多個(gè)目標(biāo)的連續(xù)監(jiān)視,自主實(shí)現(xiàn)在遙感衛(wèi)星的觀測(cè)范圍內(nèi)同時(shí)對(duì)1個(gè)高速動(dòng)目標(biāo)及多個(gè)中低速動(dòng)目標(biāo)的持續(xù)跟蹤。
1 任務(wù)規(guī)劃方法
高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤的任務(wù)過(guò)程如下。①已知各個(gè)動(dòng)目標(biāo)的編號(hào)和初始位置信息,以及高速動(dòng)目標(biāo)編號(hào),衛(wèi)星從對(duì)高速動(dòng)目標(biāo)成像開(kāi)始,依次對(duì)其余多個(gè)動(dòng)目標(biāo)成像,最后再次指向高速動(dòng)目標(biāo)。②在初始對(duì)動(dòng)目標(biāo)成像過(guò)程中,先對(duì)動(dòng)目標(biāo)進(jìn)行多次連續(xù)觀測(cè),利用九宮格算法估算動(dòng)目標(biāo)的運(yùn)動(dòng)速度,并依據(jù)運(yùn)動(dòng)速度預(yù)測(cè)相機(jī)在下次周期指向各個(gè)動(dòng)目標(biāo)的最晚時(shí)間。③考慮起始及終端狀態(tài)約束、服務(wù)次數(shù)約束及時(shí)間分配約束,以機(jī)動(dòng)角最小為目標(biāo),利用遺傳算法生成衛(wèi)星姿態(tài)機(jī)動(dòng)調(diào)度方案。④重復(fù)步驟②和③,直至任務(wù)結(jié)束。任務(wù)規(guī)劃的總體思路如圖1所示。
1.1 任務(wù)規(guī)劃的數(shù)學(xué)模型


1.2 對(duì)多個(gè)動(dòng)目標(biāo)調(diào)度方案的求解
由第1.1節(jié)可知,高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤任務(wù)規(guī)劃的求解主要分為:①對(duì)單個(gè)動(dòng)目標(biāo)持續(xù)跟蹤問(wèn)題的求解;②對(duì)多個(gè)動(dòng)目標(biāo)調(diào)度任務(wù)規(guī)劃的求解。針對(duì)①,本文采用文獻(xiàn)[13]中的九宮格算法實(shí)現(xiàn)高軌遙感衛(wèi)星對(duì)單個(gè)動(dòng)目標(biāo)的持續(xù)跟蹤。針對(duì)②,本文將詳細(xì)介紹高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)調(diào)度的求解方法。對(duì)多個(gè)動(dòng)目標(biāo)任務(wù)規(guī)劃問(wèn)題,等同于帶有約束條件的旅行商問(wèn)題(TSP),可以歸結(jié)為NP難的問(wèn)題,需要利用智能優(yōu)化算法搜索求解。
1.2.1 目標(biāo)函數(shù)
高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)任務(wù)規(guī)劃的最終目的,是在對(duì)多個(gè)動(dòng)目標(biāo)進(jìn)行連續(xù)跟蹤的前提下實(shí)現(xiàn)總機(jī)動(dòng)角最小,為了表征在1個(gè)任務(wù)周期內(nèi)總機(jī)動(dòng)角最小的特性,設(shè)目標(biāo)函數(shù)表達(dá)形式為
(1)
式中:θ為最優(yōu)機(jī)動(dòng)角函數(shù)解;αm和φm分別為衛(wèi)星相機(jī)光軸從上個(gè)動(dòng)目標(biāo)am-1指向動(dòng)目標(biāo)αm時(shí)相機(jī)光軸的滾動(dòng)角和俯仰角。
1.2.2 約束條件
1)起始及終端狀態(tài)約束
在高軌遙感衛(wèi)星對(duì)多目標(biāo)跟蹤成像的1個(gè)任務(wù)周期內(nèi),在周期的起始和結(jié)束階段,相機(jī)光軸需要指向高速動(dòng)目標(biāo)為任務(wù)集合Q的表達(dá)形式。
2)服務(wù)次數(shù)約束
在1個(gè)任務(wù)周期內(nèi),高軌遙感衛(wèi)星對(duì)于除高速動(dòng)目標(biāo)外的中低速動(dòng)目標(biāo),其相機(jī)只進(jìn)行1次跟蹤成像,即不對(duì)其重復(fù)成像,在任務(wù)序列中,元素q1分別處于最先和最后的位置,即
Q=[q1…qi…qj…qn]i≠j
(2)
3)時(shí)間分配約束

(3)
1.2.3 應(yīng)用遺傳算法的調(diào)度方案求解
根據(jù)目標(biāo)函數(shù)及約束條件,需要利用遺傳算法求出高軌遙感衛(wèi)星對(duì)動(dòng)目標(biāo)成像的最佳序列。在其中的1個(gè)任務(wù)周期內(nèi),應(yīng)用遺傳算法的衛(wèi)星調(diào)度方案見(jiàn)圖2。首先,根據(jù)起始及終端狀態(tài)約束(約束1)和服務(wù)次數(shù)約束(約束2),生成隨機(jī)任務(wù)序列Q。其次,將種群遺傳變異后得到子代總?cè)海⑶彝ㄟ^(guò)時(shí)間約束(約束3)刪除不符合約束的個(gè)體。通過(guò)目標(biāo)函數(shù)(即以高軌遙感衛(wèi)星機(jī)動(dòng)角之和最小為目標(biāo))進(jìn)行環(huán)境選擇,循環(huán)操作上述步驟,直到滿足終止條件。

圖2 應(yīng)用遺傳算法的調(diào)度方案Fig.2 Scheduling scheme using genetic algorithm
針對(duì)高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)調(diào)度的任務(wù)規(guī)劃問(wèn)題,應(yīng)用遺傳算法對(duì)多個(gè)動(dòng)目標(biāo)的調(diào)度方案起到了關(guān)鍵的作用。高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)跟蹤成像在1個(gè)任務(wù)周期內(nèi)的具體步驟為:①相機(jī)光軸指向高速動(dòng)目標(biāo);②根據(jù)遺傳算法進(jìn)行相機(jī)調(diào)度任務(wù)規(guī)劃;③依次對(duì)動(dòng)目標(biāo)進(jìn)行跟蹤成像;④將相機(jī)指向高速動(dòng)目標(biāo);⑤本個(gè)任務(wù)周期結(jié)束,并且進(jìn)行下個(gè)任務(wù)周期循環(huán)。
2 仿真結(jié)果及分析
為了驗(yàn)證本文提出的高軌遙感衛(wèi)星持續(xù)跟蹤多個(gè)動(dòng)目標(biāo)任務(wù)規(guī)劃方法的可行性及有效性,進(jìn)行如下的仿真試驗(yàn)。選擇的高軌遙感衛(wèi)星為靜止軌道衛(wèi)星,星下點(diǎn)經(jīng)度為110°。選擇3類動(dòng)目標(biāo)進(jìn)行跟蹤成像,包括1架高速飛機(jī)、2艘低速輪船和2輛中速汽車(chē)。動(dòng)目標(biāo)的初始狀態(tài)設(shè)定見(jiàn)表1,隨機(jī)生成動(dòng)目標(biāo)的運(yùn)動(dòng)路徑,仿真時(shí)長(zhǎng)設(shè)定為2.5 h。高軌遙感衛(wèi)星姿態(tài)機(jī)動(dòng)序列見(jiàn)表2,對(duì)多個(gè)動(dòng)目標(biāo)跟蹤結(jié)果見(jiàn)圖3。

表1 動(dòng)目標(biāo)的初始狀態(tài)Table 1 Initial state of moving targets

表2 衛(wèi)星姿態(tài)機(jī)動(dòng)序列Table 2 Satellite attitude maneuver sequence
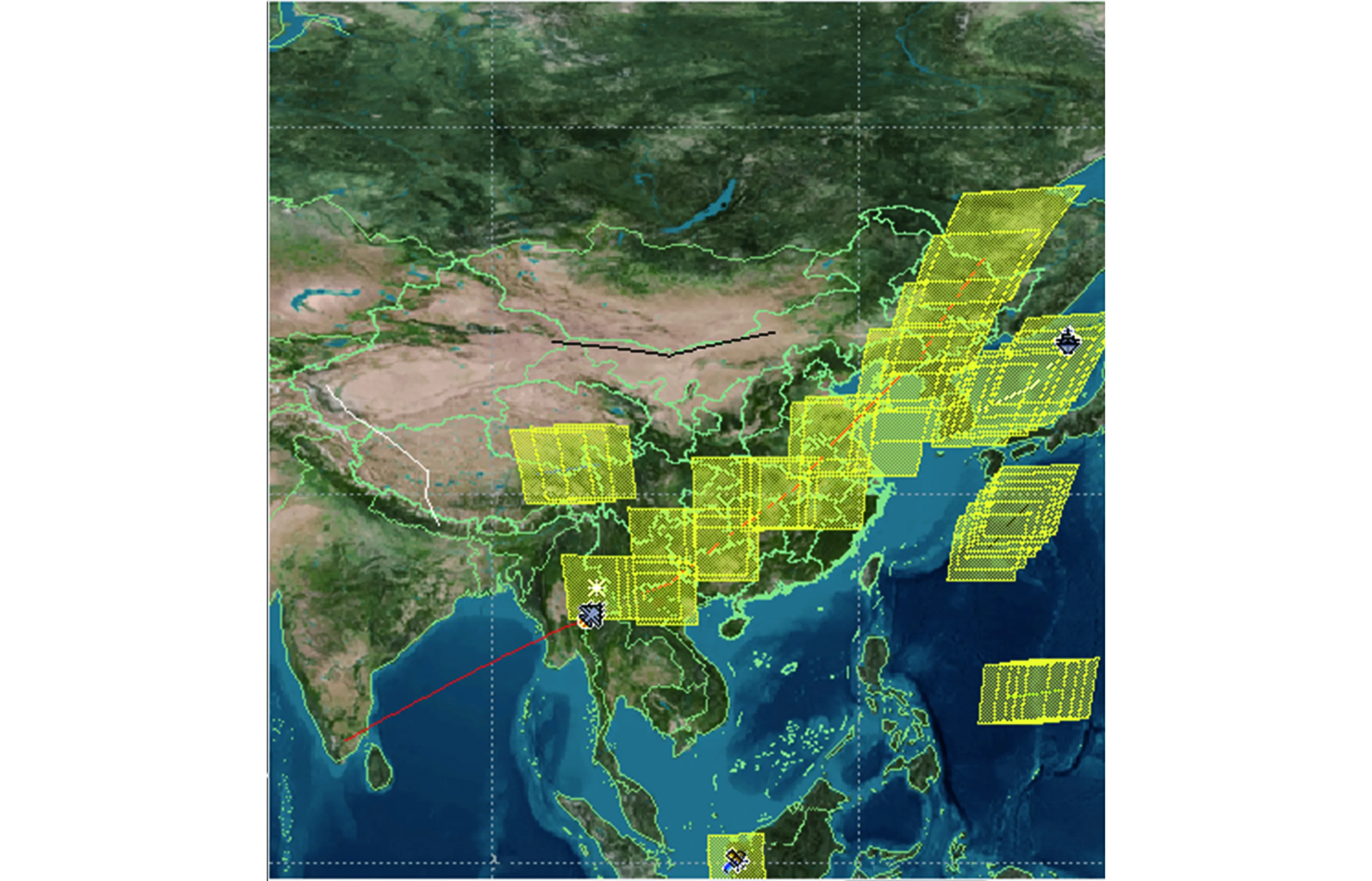
圖3 高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)跟蹤結(jié)果Fig.3 Results of high-orbit remote sensing satellite tracking moving multi-targets
由表2及圖3可知,高軌遙感衛(wèi)星首先對(duì)高速動(dòng)目標(biāo)飛機(jī)進(jìn)行持續(xù)跟蹤,當(dāng)?shù)退賱?dòng)目標(biāo)輪船和中速動(dòng)目標(biāo)汽車(chē)運(yùn)動(dòng)將要達(dá)到下次的視場(chǎng)邊界時(shí),衛(wèi)星指向中低速運(yùn)動(dòng)目標(biāo),依次成像后繼續(xù)指向高速動(dòng)目標(biāo)。循環(huán)多次,最終實(shí)現(xiàn)對(duì)多個(gè)動(dòng)目標(biāo)的持續(xù)跟蹤。該仿真結(jié)果表明:本文提出的任務(wù)規(guī)劃方法針對(duì)于1個(gè)高速動(dòng)目標(biāo)和多個(gè)中低速動(dòng)目標(biāo)的持續(xù)跟蹤效果良好,能夠在跟蹤動(dòng)目標(biāo)路徑的前提下對(duì)多個(gè)動(dòng)目標(biāo)進(jìn)行持續(xù)觀測(cè)與跟蹤。
為了更好地體現(xiàn)本文任務(wù)規(guī)劃方法的優(yōu)勢(shì),設(shè)計(jì)對(duì)比參照試驗(yàn)。對(duì)比試驗(yàn)采用貪婪求解的任務(wù)規(guī)劃方法(即當(dāng)高軌遙感衛(wèi)星對(duì)其中1個(gè)動(dòng)目標(biāo)九宮格跟蹤成像后,從其余動(dòng)目標(biāo)中選擇1個(gè)最易丟失的動(dòng)目標(biāo)進(jìn)行跟蹤成像,依次對(duì)動(dòng)目標(biāo)個(gè)體跟蹤成像,直至任務(wù)結(jié)束)。本文方法計(jì)算得到的姿態(tài)機(jī)動(dòng)角之和為18.632°,用貪婪算法計(jì)算得到的姿態(tài)機(jī)動(dòng)角之和為38.267°。可以看出:本文提出的高軌遙感衛(wèi)星持續(xù)跟蹤多個(gè)動(dòng)目標(biāo)任務(wù)規(guī)劃方法在姿態(tài)機(jī)動(dòng)角方面要遠(yuǎn)小于貪婪算法,可以有效減少姿態(tài)機(jī)動(dòng)角,縮短姿態(tài)機(jī)動(dòng)消耗時(shí)間。
3 結(jié)束語(yǔ)
本文針對(duì)高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤觀測(cè)的問(wèn)題,提出了任務(wù)規(guī)劃方法。在建立了高軌遙感衛(wèi)星對(duì)多個(gè)動(dòng)目標(biāo)持續(xù)跟蹤任務(wù)規(guī)劃數(shù)學(xué)模型的基礎(chǔ)上,以總機(jī)動(dòng)角最小為優(yōu)化目標(biāo),并且考慮起始、終端狀態(tài)約束、時(shí)間分配約束及服務(wù)次數(shù)約束。將高軌遙感衛(wèi)星對(duì)動(dòng)目標(biāo)的持續(xù)成像問(wèn)題分解為衛(wèi)星調(diào)度問(wèn)題及衛(wèi)星對(duì)動(dòng)目標(biāo)跟蹤問(wèn)題,在衛(wèi)星的調(diào)度過(guò)程中利用遺傳算法對(duì)數(shù)學(xué)模型求解。仿真結(jié)果表明:本文方法能夠?qū)崿F(xiàn)對(duì)1個(gè)高速動(dòng)目標(biāo)和多個(gè)中低速動(dòng)目標(biāo)的持續(xù)跟蹤,并且相比于傳統(tǒng)的智能優(yōu)化算法,利用該方法得到的優(yōu)化結(jié)果能夠有效地減少衛(wèi)星姿態(tài)機(jī)動(dòng)角,縮短姿態(tài)機(jī)動(dòng)消耗的時(shí)間,提升對(duì)多個(gè)動(dòng)目標(biāo)跟蹤的可靠性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國(guó)石油石化(2021年9期)2021-07-17 09:24:00
中國(guó)農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41