履帶式花生聯合收獲機路徑跟蹤控制方法與試驗
2023-03-31 07:01:18滿忠賢羅錫文李明錦李偉聰
農業工程學報 2023年1期
關鍵詞:模型
何 杰,滿忠賢,胡 煉,羅錫文,汪 沛,李明錦,李偉聰
履帶式花生聯合收獲機路徑跟蹤控制方法與試驗
何 杰1,2,3,滿忠賢1,胡 煉1,2,3※,羅錫文1,2,3,汪 沛1,2,3,李明錦1,李偉聰1
(1. 華南農業大學南方農業機械與裝備關鍵技術教育部重點實驗室,廣州 510642;2.嶺南現代農業科學與技術廣東省實驗室,廣州 510642;3. 廣東省農業人工智能重點實驗室,廣州 510642)
為提高無人駕駛履帶式花生收獲機沙地作業路徑跟蹤精度,以4HBL-2型自走式花生聯合收獲機為研究對象,開展了履帶式收獲機無人駕駛路徑跟蹤控制研究。建立了履帶式收獲機運動學模型與虛擬轉向角函數關系;以航向偏差值作為觀測量、阿克曼模型推算角速度作為測量值,設計卡爾曼融合算法,獲得基于阿克曼模型的虛擬轉向角度;根據虛擬轉向角度對PID路徑跟蹤算法進行改進,提出了基于預瞄跟蹤的雙PID路徑跟蹤控制方法;通過脈沖寬度控制器實現了履帶式花生收獲機路徑跟蹤精準控制。仿真試驗結果表明:基于預瞄跟蹤雙PID的路徑跟蹤控制方法能夠進行路徑跟蹤控制,具有控制平滑和穩態誤差小等特點。田間試驗表明:花生收獲機在沙地以0.6m/s的速度作業時,系統直線跟蹤平均絕對誤差為2.23 cm,最大偏差為4.14 cm,相對于PD路徑跟蹤控制器分別提高了56.12%和66.07%。上線試驗中,初始偏差分別是0.5、1.0和1.5 m時,上線時間分別為11.00、12.92和13.78 s,上線距離為6.60、7.75和8.26 m;最大超調量分別為5.68%、5.84%和8.06%,相較于輪式收獲機,上線距離分別減小了1.92%、4.43%、8.71%,超調量分別減少了8.45%、17.56%、5.17%;接行最大偏差為5.87 cm,平均絕對誤差為2.72 cm,接行偏差在±5和±10 cm內的比例分別為97.11%和100%,路徑跟蹤控制精度能夠滿足沙地無人駕駛作業要求。
農業機械;收獲;路徑規劃;花生;預瞄控制;虛擬阿克曼
0 引 言
花生是重要的油料和經濟作物[1-2]。花生收獲是花生生產的關鍵環節之一,作業成本占花生生產成本約50%[3-5]。花生主要種植區域花生收獲機械化率較高,但是智能化水平仍然較低。加裝自動導航的拖拉機應用于花生播種作業中,提高了壟行直線度和播種質量,同時減少了人工勞動強度。花生收獲機械也亟待向智能化、無人化方向發展。
目前履帶式花生聯合收獲機是主要的花生收獲機械之一,具有接地面積大、對土壤壓強小和轉彎半徑小等特點[6-8]。針對履帶式花生聯合收獲機運動學特點和對壟收獲作業的特點,建立起適合履帶式車輛的路徑跟蹤控制方法是提高履帶式車輛適應性的關鍵技術之一。康翌婷等[9]針對履帶式車輛自主行駛控制中滑動參數難以精確估計和在復雜地面條件下難以穩定跟蹤目標路徑的問題,建立起了基于球-面接觸原理的履帶式車輛運動學模型,相較于傳統的履帶式車輛滑動轉向模型,控制器在地面不平條件下仍然能夠實現穩定的路徑跟蹤控制,跟蹤正弦曲線的位置絕對誤差減小0.06 m,航向角絕對誤差減小0.25 rad。張聞宇等[10]針對無人駕駛過程中傳統的二輪運動學模型無法描述運動狀態的問題,以油菜播種機為研究平臺,提出了基于SVR逆變模型的雙切圓尋線純跟蹤模型,在直線速度為1.2 m/s的情況下,位置偏差最大值小于6 cm,絕對平均誤差不大于1.5 cm。
丁幼春等[11]以小型履帶式油菜播種機為研究對象,采用電磁鐵作為執行機構,北斗導航和電子羅盤進行組合導航,提出了一種基于免疫PID的路徑跟蹤控制方法,比傳統PID路徑跟蹤控制方法最大跟蹤誤差降低了18.1%,平均跟蹤誤差降低了32.6%。張朝宇等[12]為實現履帶式播種機自動導航作業要求,設計了基于模糊自適應純跟蹤導航控制方法,對航向偏差、橫向偏差、速度進行模糊化,提高了導航系統穩定性,實現了較少人為干預下的播種作業,田間試驗表明模糊自適應可自主調節前視距離,當油菜播種機速度為0.5、0.8、1.2 m/s時,模糊自適應純跟蹤控制器最大跟蹤偏差分別不大于0.082、0.086、0.092 m,平均絕對偏差分別不大于0.031、0.032、0.034 m。關卓懷等[13]針對水田環境下的履帶式收獲機路徑跟蹤控制方法,以履帶式聯合收獲機為研究對象,建立起履帶式車輛轉彎運動學模型,為黏濕土壤環境中的履帶收獲機路徑跟蹤算法的設計提供理論參考。
花生種植于沙質土壤中,由于沙地表面松軟易產生流動,引起農機發生側滑、滑轉等現象,影響花生收獲機作業路徑跟蹤控制精度和穩定性。賈全等[14]提出了一種基于航向預估模型的路徑跟蹤控制算法,利用車輛當前航向和航向預估量之和作為反饋量,在一定程度上克服了滑移現象對控制精度的影響。由于沙質路面條件呈非線性變化,履帶式車輛在路徑跟蹤時存在不確定動態變化,轉向過程中存在控制一致性差、轉向響應慢等問題,因此設計優良的路徑跟蹤控制算法對提高履帶車輛在沙地環境下的運動性能尤為重要。此外,收獲機在收獲一壟兩行種植方式的花生時,合秧器和挖掘機構將兩行花生秧果集成一行通過傳動鏈傳送到摘果機構中,如不能實現精準路徑跟蹤將使合秧器偏離花生行出現漏收,導致收獲損失大、效率低等問題[15-17]。當前收獲機無人駕駛的研究與應用主要以相對定位為主,且作業方式為無重疊作業,而花生收獲機要求精準對壟作業,針對無人駕駛的履帶式花生收獲機在確保對壟直線收獲和自動對行收獲作業方面研究較少。因此,亟需研究履帶式花生收獲機的路徑跟蹤控制方法,實現花生壟行精準跟蹤和對行收獲作業。
本文以東泰4HBL-2型履帶自走式花生聯合收獲機為研究對象,針對履帶式花生收獲機在沙地環境下的花生壟行精準跟蹤和對行收獲作業的問題,根據虛擬阿克曼模型建立履帶式車輛的車體運動學模型,建立阿克曼模型的虛擬轉向角度卡爾曼融合算法,采用定位模塊獲取花生收獲機距離偏差和航向偏差作為導航控制器的輸入,設計了基于預瞄跟蹤雙PID的路徑跟蹤控制方法。以轉向控制角度作為轉向控制器的輸入,通過脈沖寬度調制控制進行轉向控制,并進行仿真分析和田間試驗驗證。
1 履帶式花生收獲機運動學模型
履帶式花生收獲機的行走裝置包含兩條與機器縱軸線平行的履帶,既無法實現偏轉車輪轉向,也無法實現折腰轉向,只能通過兩側履帶驅動鏈輪的轉速差實現轉向[18-20]。履帶式花生收獲機采用單邊制動方式實現差速轉向,轉向中心位于制動輪的外側,因此車輛在轉彎時,車輛的轉向中心會在左右履帶的外側切換[21-23],兩側履帶圍繞轉彎中心做純滾動運動[24-26]。履帶式花生收獲機向左轉彎時,左側轉向角度大于右側角度,車輛圍繞同一個圓心做轉動,反之履帶式花生收獲機向右轉彎時,右側轉向角度大于左側角度,內側與外側形成一定的轉角差。忽略轉向過程中的滑移,單邊制動轉向時會在一段時間內雙側履帶轉速不同,忽略車輛在軸方向的運動,只考慮平面運動可將履帶式花生收獲機簡化為單車模型。轉向時左右側履帶轉向角度不同,同側履帶作為一個剛性系統,可將雙側履帶轉向簡化成阿克曼轉向特性的虛擬輪角進行控制。虛擬阿克曼模型如圖1所示,以正北方向為軸正向,以正東方向為軸正向建立車體坐標系,轉向時存在如下幾何關系:
令為履帶平均轉向角度,則
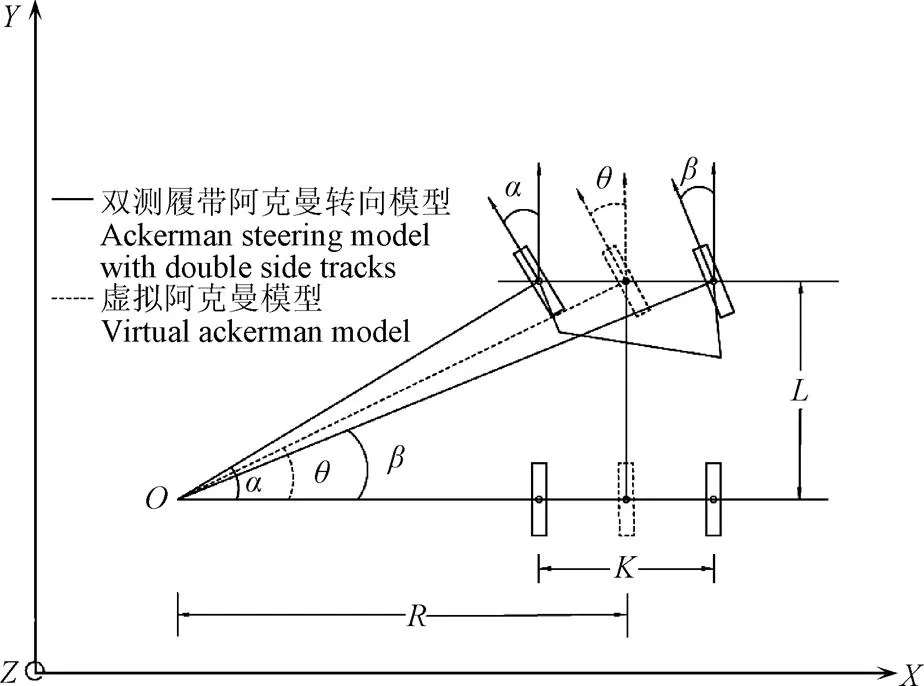
注:α為內測履帶轉向角度,(°);β為外測履帶轉向角度,(°);θ為車輛前進方向正東方向的夾角即航向角,(°);L是車輛履帶的長度,m;K為履帶軌距,m;R為轉彎半徑,m。
虛擬阿克曼模型車輛的控制中心位于虛擬后輪上,在笛卡爾坐標系下轉向角速度為
式中′為基于虛擬阿克曼模型的車輛轉向角速度,rad/s。
2 履帶式花生收獲機路徑跟蹤控制
2.1 虛擬轉向角度估計
采用雙天線GNSS獲取車體的航向變化,利用車輛轉向角速度獲取角度變化率。履帶式車輛在轉向過程中實現兩側履帶同步控制,在任何時刻都需滿足式(1)中的轉角約束條件。
以航向偏差值作為觀測量、阿克曼模型推算的角速度為測量值,時刻的虛擬轉向角度和阿克曼模型轉向角速度偏差作為狀態向量參數,建立阿克曼模型的虛擬轉向角度卡爾曼融合算法。
虛擬阿克曼轉向系統狀態方程為
式中x為時刻的狀態向量;R、分別為時刻的虛擬轉向角度和轉向角速度偏差。
建立時刻的轉角運動的遞推方程和觀測方程

根據卡爾曼融合算法可得
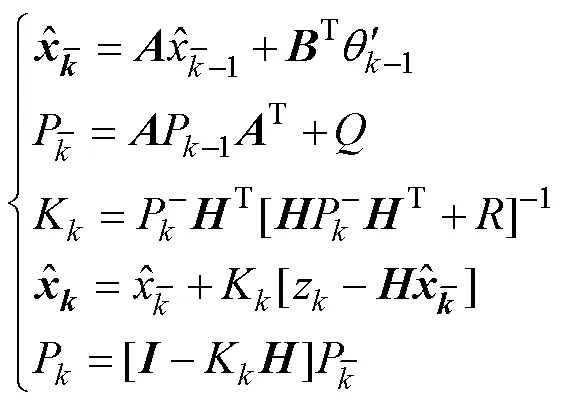
式中為單位向量。
通過卡爾曼融合算法可得基于阿克曼模型的履帶式花生收獲機的虛擬轉向角度為
2.2 預瞄跟蹤雙PID控制
采用預瞄跟蹤控制方法實現履帶式花生聯合收獲機路徑跟蹤控制,如圖2所示,建立車體導航坐標系(XOY)。定義履帶式車輛的前進方向與正東方向的夾角為航向角,規劃的跟蹤直線是導航基準線,設定車輛在導航基準線的左側位置偏差為負(P<0),車輛在導航基準線的右側位置偏差為正(P>0),相對于導航預瞄基準點的航向偏差′為
則車輛轉向角度θ為
式中1,2為控制常數。
當系統受到干擾時,單靠預瞄跟蹤控制效果較差,抗干擾能力弱。因此在預瞄跟蹤的基礎上增加PID控制環節,根據位置偏差和航向偏差分別采用不同PID控制參數以滿足系統的快速響應性和穩定性。
針對位置偏差的PID控制量θ為

式中K,K,K為位置偏差的控制PID參數;P(k),P(?1)為和?1時刻的位置偏差,m;為位置偏差采集周期,s。
根據式(12)和式(13)可得出轉向角度控制量為
采用的轉向控制角度采用增量式PD控制器,其中控制增量為
輸出到轉向系統控制量為

注:為履帶式收獲機的預瞄跟蹤控制點,是導航基準線上的一個預瞄點,d是預瞄距離,m,是過點的導航基準線垂線,P表示車輛中心距離導航基準線的距離即位置偏差,m;′為相對于導航預瞄基準點的角度偏差,(°);為航向偏差,(°)。
Note:means preview tracking control point of crawler harvester;means a preview point on the navigation datum line;dmeans the preview distance, m;is the vertical line passing throughas the navigation reference line;Pmeans the distance between the center of the vehicle and the navigation reference line is the position deviation, m;′ is the angular deviation from the navigation preview reference point, (°);is heading deviation, (°).
圖2 預瞄跟蹤模型
Fig.2 Preview tracking model
2.3 轉向控制決策
式(16)中轉向角度θ是花生收獲機控制點(GNSS右天線)的虛擬轉向角,但實際控制目的是保證花生收獲機構(即合秧器和挖掘機構)準確跟蹤花生行,控制點與花生收獲機構存在桿臂效應[27-30],控制點與花生收獲機構桿臂效應如圖3所示。桿臂效應誤差是由于花生收獲機構與控制點中心不重合的情況下轉向角度發生偏移引起的。當花生收獲機發生轉向時,由于航向偏差影響,控制中心所計算的虛擬轉向角度和收獲機構實際轉向角度存在一個誤差角度,導致最終花生收獲機構存在控制誤差。因此,在代入轉向決策時需要進行桿臂效應誤差補償。
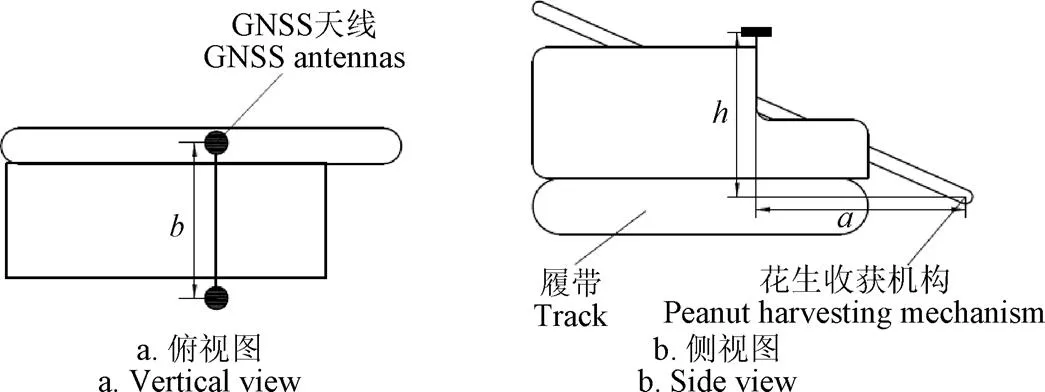
注:a、b、h為控制點與花生收獲機構底盤中心的位置偏差,m。
控制點到花生收獲機構的桿臂長度矩陣為
根據花生收獲機雙天線GNSS所測得的收獲機姿態位置信息中的航向角φ,(°);橫滾角φ,(°),車體坐標系以控制點為坐標原點,導航坐標系與車體坐標系的轉換矩陣為

在航向角方向上合成最終的虛擬轉向角度為
根據履帶式花生收獲機的轉向特性,采用開關式電磁閥控制“離合器撥叉”組成新的轉向系統;導航控制器控制指令控制電磁閥的開關,對離合器撥叉進行通斷,最終達到單邊制動轉向。考慮到機械傳動系統中存在間隙以及開關閥的滯后性,為了降低履帶式車輛轉向時的抖動,提高控制精度,結合計算出的虛擬轉向角,建立脈沖寬度調制(pulse width modulation,PWM)運動控制器驅動花生收獲機轉向:
式中max為車輛最大轉向角度,(°);max為一個控制周期內最大控制次數;S為一個控制周期內轉向的次數;S為輸出轉向控制次數。
2.4 仿真分析
為了驗證虛擬阿克曼模型和預瞄跟蹤雙PID路徑跟蹤控制方法的正確性和有效性,在Matlab中對虛擬轉向角度控制進行仿真。設定輸入的決策角度為峰值28°的正弦信號,輸出為運動控制器的階躍信號,仿真時間70 s,采樣時間間隔為0.01 s,探究在不同輸入角度下系統輸出脈寬信號,虛擬轉向控制仿真模型如圖4所示。
仿真試驗結果如圖5所示,在不考慮外界噪聲的情況下,當系統輸入較小轉向角度時,轉向決策系統將不再輸出左右轉向,收獲機保持直線行駛;當輸入大于最小轉向角度時,轉向決策系統會根據輸入角度的增大而增加輸出角度。轉向控制系統將虛擬轉向角度分解成若干個控制階段,使收獲機更加平穩地執行轉向動作仿真結果表明:基于預瞄跟蹤雙PID的路徑跟蹤控制方法能夠進行路徑跟蹤控制,具有控制平滑和穩態誤差小等特點。
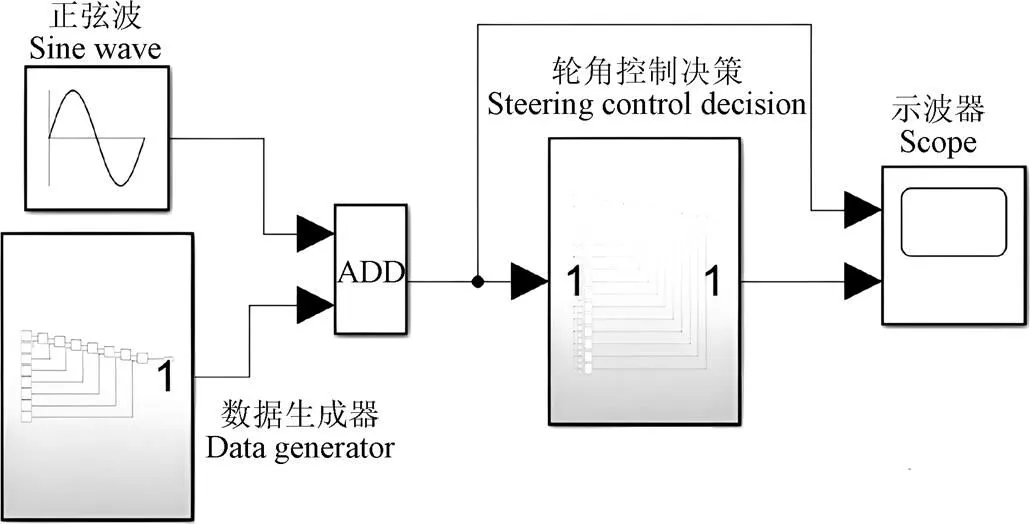
圖4 虛擬轉向控制仿真模型
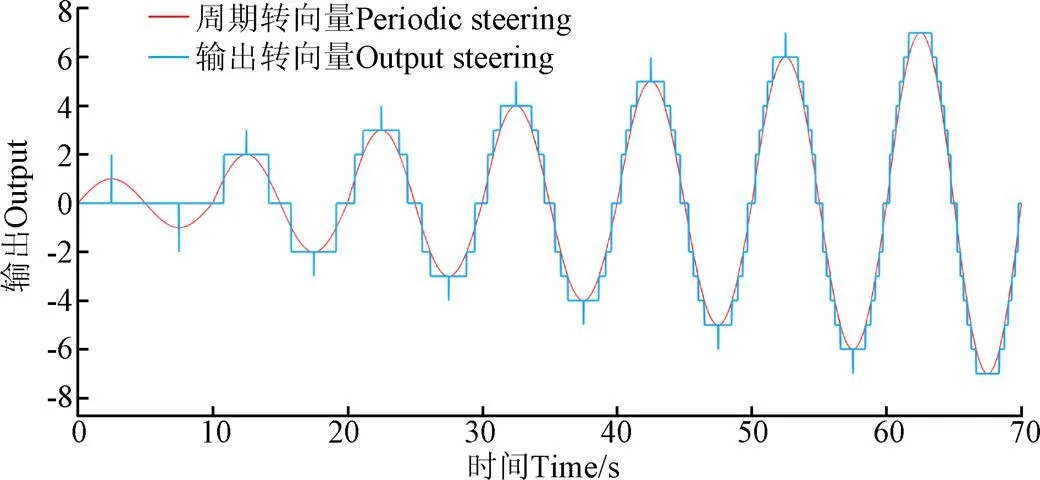
圖5 輸出脈寬控制信號
3 田間試驗與分析
3.1 試驗材料
履帶式花生聯合收獲機采用東泰生產的4HBL-2型自走式花生聯合收獲機,由履帶式底盤、柴油發動機、收獲機構、摘果及清選機構、輸送機構、儲藏卸果機構組成。無人化設計后的無人駕駛履帶式花生收獲機組成如圖6所示。
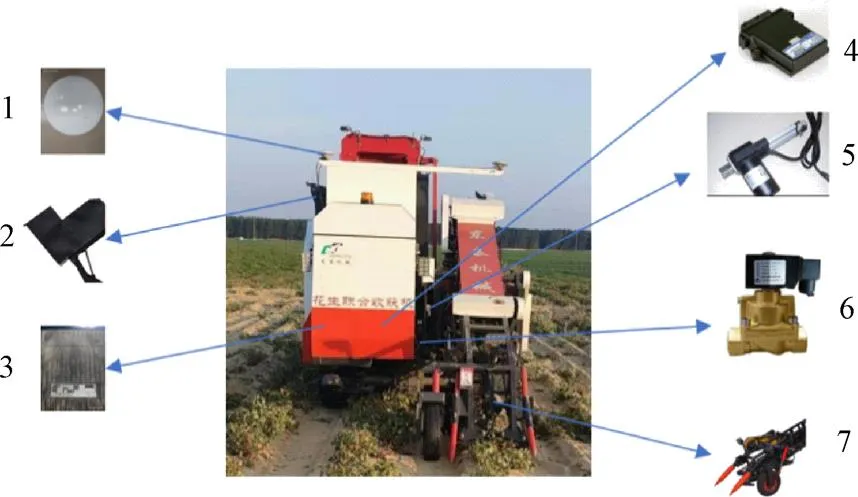
1.定位天線 2.儲藏與卸果裝置 3.導航控制器 4.運動控制器 5.推桿電機 6.開關電磁閥 7.收獲裝置
無人駕駛系統由導航控制器、顯示終端、網絡差分模塊和轉向機構組成。控制器集成了高精度北斗定位模塊,北斗定位模塊采用雙天線板卡K728,其定位精度為1 cm,航向精度0.2°/0(0為雙天線基線長,本文采用的是1.6 m),控制器直線導航控制精度為±2.5 cm,平均接行精度為±2.5 cm;顯示終端采用嵌入式電容觸摸顯示屏7"TFT LCD,分辨率800×480,用于配置導航控制參數及實時路徑顯示;網絡差分模塊采用HY-C44R網絡差分接收機通過NTRIP協議建立起GNSS差分數據傳輸通道,RTK精度為水平方向±1 cm,為導航控制器提供實時差分定位;轉向系統是由推桿電機、開關式電磁閥和運動控制器組成,運動控制器采用SPC-STW-2612CM,具備6路比例閥PVC功能及2路H橋功能。運動控制器通過控制推桿電機的伸縮和開關式電磁閥的通斷來控制履帶式花生機的轉向機構。導航控制系統結構框圖如圖7所示。
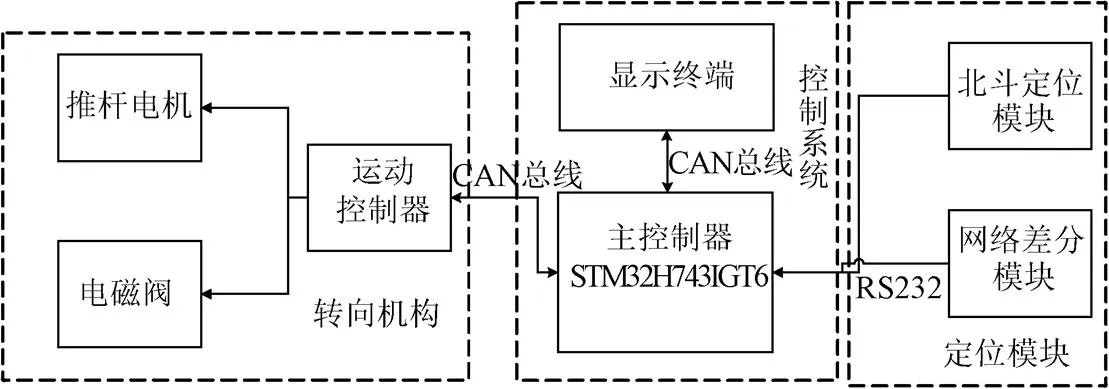
圖7 導航控制系統結構框圖
3.2 試驗方法
為驗證基于預瞄跟蹤雙PID的路徑跟蹤控制方法在沙地環境下的控制精度,在廣東省湛江市南三鎮沙地花生種植基地進行試驗,試驗分3組進行:
1)直線跟蹤試驗:履帶式收獲機在沙地中自動導航作業,考察其小角度控制的跟蹤精度。
2)上線性能試驗:在不同位置偏差的情況下,花生收獲機自主上線,考察其上線時間及超調量。
3)接行性能試驗:收獲機在完成一行作業之后自主轉向下一行作業,考察其轉向性能及偏差量。
試驗時,設定的系統參數分別為:預瞄距離d=2,常數1、2分別為1.1、0.9,位置偏差控制PID參數K、K、K為0.9、0.05、0.5,航向偏差控制PID參數′p、′i、′d為1.2、0.08、0.5,控制點到花生收獲機構的桿臂長度=[2.4 0.8 2.1]T,坐標原點位于車體幾何中心。
3.2.1 直線跟蹤試驗
控制收獲機以0.6 m/s的速度,初始位置偏差和航向偏差為0的條件下(初始的位置偏差至±3 cm,航向偏差至±1.5°)進行直線跟蹤試驗。采用北斗定位裝置記錄車輛位置信息和航向信息,定位信息采樣頻率為10 Hz,進行多次試驗計算其相對偏差量。
試驗步驟:
1)獲取地塊的邊界點信息,分別在地塊的兩端選取P、P兩點作為直線跟蹤試驗的起點和終點;
2)導航系統選擇無人駕駛模式,使收獲機沿著PP進行直線跟蹤;
3)設置收獲機的速度為0.6 m/s,放下花生收獲機收獲大架調節至合適高度;
4)啟動花生收獲機,開始進行直線跟蹤試驗;
5)根據車載北斗定位裝置實時記錄車輛定位數據;
6)重復進行多次試驗,并將試驗數據進行滑動均值濾波,消除異常點的干擾,分析直線跟蹤特性。
試驗結果如圖8所示,圖8a中可見階梯狀的位置偏差,表明系統為防止持續糾偏導致震蕩,將轉向過程分解成多個過程完成,提高了系統的穩定性。圖8b中將航向偏差控制在一定范圍內,航向偏差發生較大的改變時系統控制花生收獲機執行轉向操作,并不會對位置偏差產生較大的影響。當位置偏差和航向偏差累計到一定程度時系統能夠快速糾偏以保證直線跟蹤。直線跟蹤誤差進行統計,結果如表1所示,在沙地環境下,位置偏差絕對值極值為4.14 cm,平均絕對誤差為2.23 cm,位置偏差標準差為1.17 cm。相對于PD控制器[31],基于預瞄跟蹤雙PID的路徑跟蹤控制方法平均絕對誤差提高了56.12%,最大位置偏差減小66.07%。試驗表明預瞄跟蹤雙PID算法適用于沙地無人駕駛,在凹凸不平的沙地具有良好的魯棒性,提高了花生收獲機沙地收獲作業直線度。
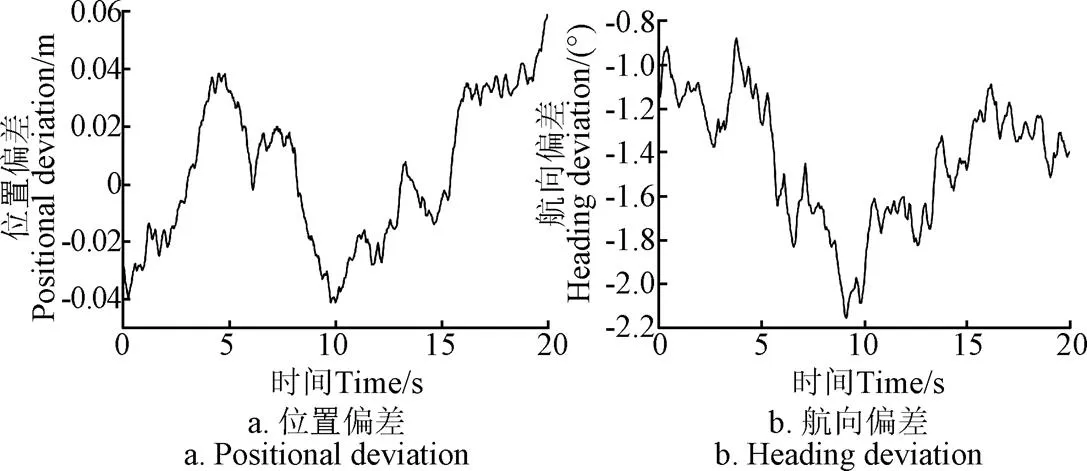
圖8 直線跟蹤位置偏差和航向偏差
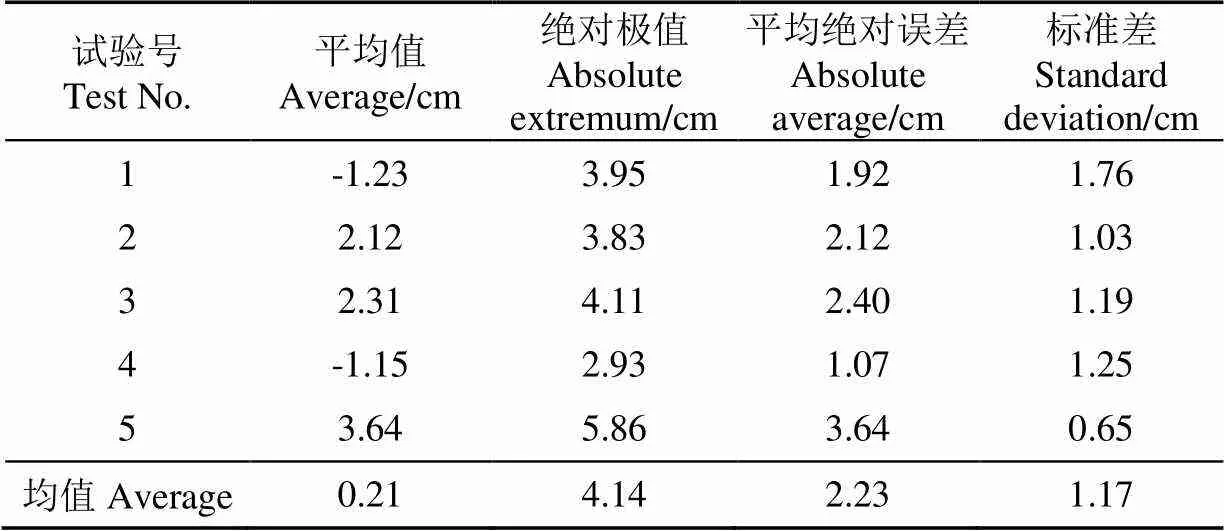
表1 直線跟蹤的位置偏差統計
3.2.2 上線性能試驗
選取距離目標航線0.5、1.0和1.5 m作為初始位置偏差,收獲機速度為0.6 m/s,測試履帶式花生收獲機的上線要求。按照花生收獲所需的上線性能,將花生收獲機位置調整到導航基準線±5cm范圍,航向偏差調整到±1.5°范圍,即達到上線要求。其中初始位置是指車輛與目標航線的垂直距離,初始航向偏差保證在±1°,上線距離為車輛達到上線狀態所走過的距離。
試驗結果如圖9所示。上線過程中由于位置偏差較大,會產生一個較大的橫向速度,甚至朝著規劃路徑的垂直方向駛去,當位置偏差不斷縮小,縱向速度不斷加大,車輛擺正方向迅速上線。由于開關閥轉向特性,收獲機在上線之后還會存在一個橫向速度,系統進入慣性狀態,隨著時間推移系統逐步進入穩定狀態。對上線過程中位置偏差進行統計,結果如表2所示,可以看出位置偏差為0.5、1.0、1.5 m時上線時間分別為11.00、12.92、13.78 s;上線距離為6.60、7.75、8.26 m;最大超調量分別為5.68%、5.84%、8.06%;相較于輪式收獲機上線性能[32],上線距離分別減小了1.92%、4.43%、8.71%,超調量分別減小了8.45%、17.56%、5.17%。在不同的位置偏差條件下,上線距離相差不大,但上線時間相差較大,上線時間取決于初始的位置偏差。試驗結果表明,采用基于預瞄跟蹤雙PID的路徑跟蹤控制方法可以有效提高開關式轉向的履帶式收獲機的上線效果和穩定性,上線后收獲機快速進入直線跟蹤模式,超調量較小。
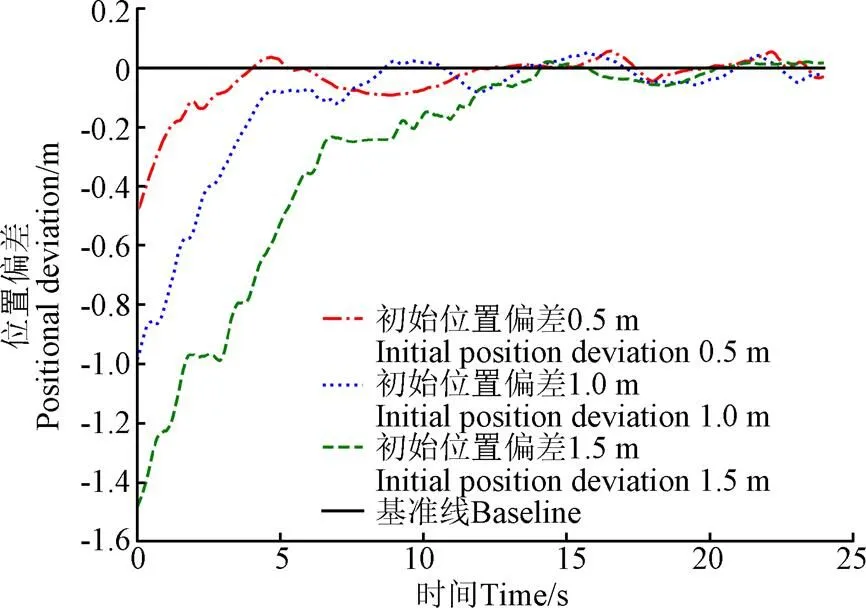
圖9 不同初始位置的上線過程
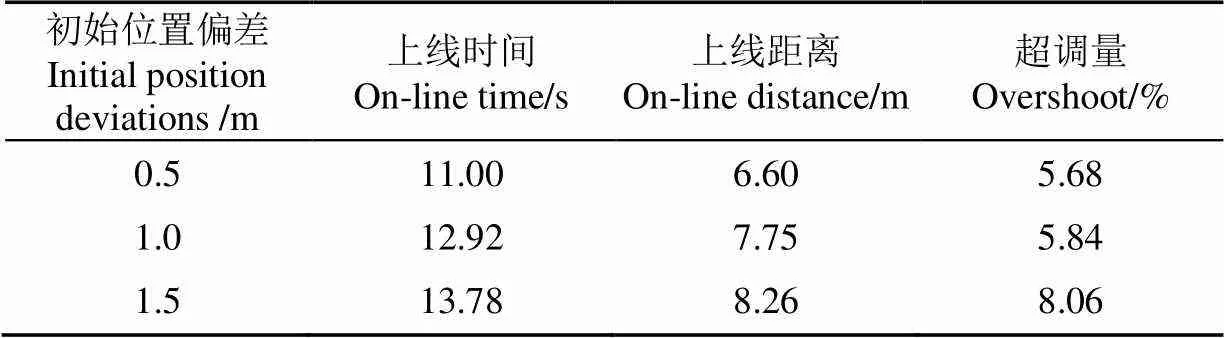
表2 不同初始位置偏差上線性能數據統計
3.2.3 接行性能試驗
選取一塊待收獲的花生地作為試驗場地,如圖 10所示,測試花生收獲機的地頭接行精度。

圖10 花生收獲機實地作業圖
試驗過程為:首先采集試驗場地的邊界信息,自動生成作業路徑,設置基本的控制參數,將收獲機動力檔放到N檔,啟動導航開始作業,待機器上線進入直線作業后開始記錄數據。
采集的收獲機的實時定位數據如圖11所示,花生田塊邊界兩邊預留出安全的轉向距離,采用口字形路徑規劃方法規劃出20行作業行,行與行之間間距80 cm,經過實地測量保證每一規劃行都位于花生壟中心。當花生機到達地頭轉彎點時,花生收獲機原地旋轉90°,行走至下一行的轉彎點。下一行上線后能夠迅速進入直線跟蹤狀態,控制平穩、對行精度高,適用于花生收獲機自主換行。履帶式花生收獲機在不同位置的轉向接行性能測試,結果如表3所示,花生收獲機接行最大偏差為5.87 cm,平均絕對誤差為2.72 cm,接行偏差在±5和±10 cm內的比例分別為97.11%和100%,接行性能滿足相對于T/CAAMM 14-2018農業機械衛星導航自動駕駛系統后裝通用技術條件要求。
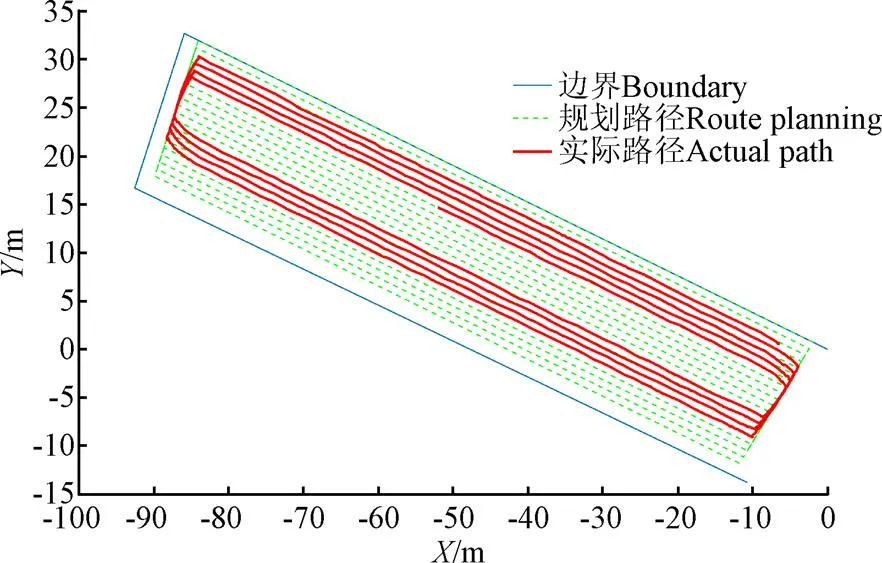
圖11 花生收獲機實時路徑圖
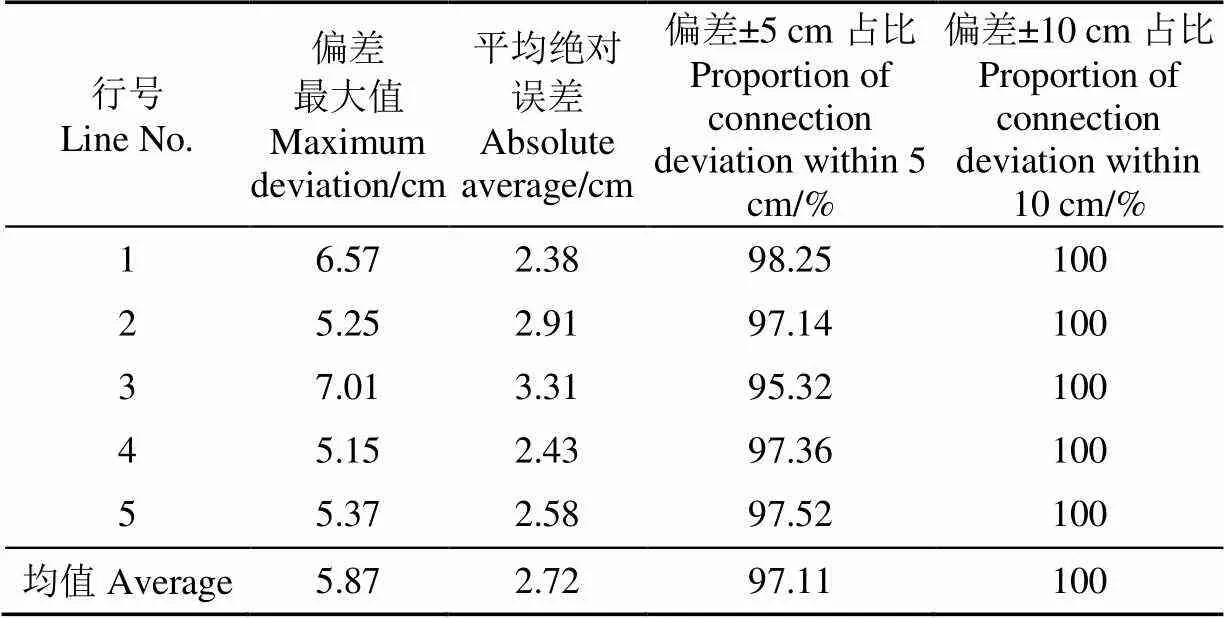
表3 接行性能測試結果
4 結 論
1)設計了雙側履帶阿克曼轉向模型,建立了履帶式花生收獲機運動學模型和轉向角傳遞函數,并構建了Simulink仿真模型,正弦波仿真試驗結果表明:基于預瞄跟蹤雙PID 的路徑跟蹤控制方法能夠進行路徑跟蹤控制,具有控制平滑和穩態誤差小等特點。驗證了雙側履帶阿克曼轉向模型的可行性。
2)設計了基于預瞄跟蹤雙PID的路徑跟蹤控制方法,與路徑跟蹤PD 控制相比,預瞄雙PID路徑跟蹤控制方法平均絕對誤差提高了56.12%,最大位置偏差減小了66.07%。
3)在沙地開展了履帶式花生聯合收獲機路徑跟蹤控制方法的直線、上線和接行性能試驗。結果表明:花生收獲機以0.6 m/s的速度作業時,位置偏差絕對極值為4.14 cm,平均絕對誤差為2.23 cm,位置偏差標準差為1.17 cm;上線試驗中,初始位置偏差分別是0.5、1.0、1.5 m時,上線時間分別為11.00、12.92、13.78 s;上線距離為6.60、7.75、8.26 m;最大超調量分別為5.68%、5.84%、8.06%;接行試驗中花生收獲機接行最大偏差為5.87 cm,平均絕對誤差為2.72 cm,接行偏差在±5和±10 cm內的比例分別為97.11%和100%,控制精度滿足履帶式花生收獲機沙地作業要求。
[1] 陳有慶,胡志超,王申瑩,等. 割秧后花生收獲機撿拾裝置設計與試驗[J]. 農業工程學報,2020,36(16):1-8.
CHEN Youqing, HU Zhichao, WANG Senying, et al. Design and experiment of picking device of peanut harvester after seedling cutting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(16): 1-8. (in Chinese with English abstract)
[2] 龐德亮,張書坤,李玉杰. 花生收獲機的研究現狀及發展趨勢[J]. 南方農機,2019,50(4):32.
[3] 王伯凱,顧峰瑋,于昭洋,等. 軸流式全喂入花生收獲機撿拾機構設計與試驗[J]. 農業機械學報,2020,51(10):132-141.
WANG Bokai,GU Fengwei,YU Zhaoyang,et al. Design and experiment of picking-up mechanism of axial-flow full-feed peanut harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(10): 132-141. (in Chinese with English abstract)
[4] 史正芳,王蘭安. 花生收獲機械的發展現狀與前景[J]. 山東農機化,2019,331(2):25-26.
[5] 王斌斌,張軒. 南方花生收獲機的設計與試驗[J]. 現代農業裝備,2020,41(4):33-38.
WANG Binbin, ZHANG Xuan. Design and experiment of peanut harvester in South China[J]. Modern Agricultural Equipment, 2020, 41(4): 33-38. (in Chinese with English abstract)
[6] 解彬彬,劉繼展,蔡連江,等. 小地塊履帶農機UWB導航系統設計及其基站布置[J]. 農業工程學報,2022,38(7):48-58.
XIE Binbin,LIU Jizhan,CAI Lianjiang,et al. Design of the UWB navigation system for tracked agricultural machinery
in small land and analysis of base station layout[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(7): 48-58. (in Chinese with English abstract)
[7] 游兆延,吳惠昌,胡志超,等. 4HLB-2型花生收獲機挖掘深度的模糊控制[J]. 西北農林科技大學學報(自然科學版),2015,43(11):221-227.
YOU Zhaoyan, WU Huichang, HU Zhichao, et al. Fuzzy control of digging depth of HLB-2 peanut harvester[J]. Journal of Northwest A&F University (Natural Science Edition), 2015, 43(11): 221-227. (in Chinese with English abstract)
[8] TANG Z, ZHANG T, LI C, et al. Developments of crawler steering gearbox for combine harvester straight forward and steering in situ[J]. International Journal of Agricultural and Biological Engineering, 2020, 13(1): 120-126.
[9] 康翌婷,張煜,曾日芽. 地面不平條件下考慮滑動轉向特性的履帶車輛路徑跟蹤控制[J]. 中南大學學報(自然科學版),2022,53(2):491-501.
KANG Yiting, ZHANG Yu, ZENG Riya. Path tracking control of tracked vehicle considering sliding steering characteristics under uneven ground conditions[J]. Journal of Central South University (Science and Technology), 2022, 53(2): 491-501. (in Chinese with English abstract)
[10] 張聞宇,丁幼春,李兆東,等. 基于雙切圓尋線模型的農機導航控制方法[J]. 農業機械學報,2016,47(10):1-10.
ZHANG Wenyu, DING Youchun, LI Zhaodong, et al. Navigation control method of agricultural machinery based on double tangent circle line-finding model[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(10): 1-10. (in Chinese with English abstract)
[11] 丁幼春,何志博,夏中州,等. 小型履帶式油菜播種機導航免疫PID控制器設計[J]. 農業工程學報,2019,35(7):12-20.
DING Youchun, HE Zhibo, XIA Zhongzhou, et al. Design of navigation immune PID controller for small crawler rapeseed seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(7): 12-20. (in Chinese with English abstract)
[12] 張朝宇,董萬靜,熊子慶,等. 履帶式油菜播種機模糊自適應純追蹤控制器設計與試驗[J]. 農業機械學報,2021,52(12):105-114.
ZHANG Chaoyu, DONG Wanjing, XIONG Ziqing, et al. Design and experiment of fuzzy adaptive pure tracking controller for crawler seeder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2021, 52(12): 105-114. (in Chinese with English abstract)
[13] 關卓懷,沐森林,吳崇友,等. 履帶式聯合收獲機水田作業轉向運動學分析與試驗[J]. 農業工程學報,2020,36(13):29-38.
GUAN Zhuohuai, MU Senlin, WU Chongyou, et al. Kinematics analysis and experiment of crawler combine harvester steering in paddy field[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(13): 29-38. (in Chinese with English abstract)
[14] 賈全,張小超,苑嚴偉,等. NF-752型履帶式拖拉機自動駕駛系統[J]. 農業工程,2018,8(4):24-29.
JIA Quan, ZHANG Xiaochao, YUAN Yanwei, et al. Automatic driving system of NF-752 crawler tractor[J]. Agricultural Engineering, 2018, 8(4): 24-29. (in Chinese with English abstract)
[15] 翟新婷,陳明東. 花生聯合收獲機秧蔓夾持輸送系統載荷譜編制[J]. 農業機械學報,2020,51(S1):261-266.
ZHAI Xinting, CHEN Mingdong. Load spectrum compiling of peanut combine harvester's seedling clamping and conveying system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(S1): 261-266. (in Chinese with English abstract)
[16] 王申瑩,胡志超,吳峰,等. 全喂入花生撿拾收獲機喂入量建模與試驗[J]. 農業工程學報,2019,35(23):29-36.
WANG Shenying,HU Zhichao,WU Feng,et al. Modeling and experiment of feeding rate for full-feed peanut pickup
harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(23): 29-36. (in Chinese with English abstract)
[17] 于昭洋,胡志超,曹明珠,等. 切流式花生全喂入聯合收獲機清選機構設計[J]. 農業工程學報,2019,35(9):29-37.
YU Zhaoyang, HU Zhichao, CAO Mingzhu, et al. Design of cleaning device of tangential flow and whole-feed peanut combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(9): 29-37.(in Chinese with English abstract)
[18] 曾錦鋒,陳晨,楊蒙愛. 基于阿克曼轉向原理的四輪轉向機構設計[J]. 輕工機械,2013,31(3):13-16.
CENG Jinfeng, CHEN Chen, YANG Meng'ai. Design of four-wheel steering mechanism based on Ackerman steering principle[J]. Light Industry Machinery, 2013, 31(3): 13-16. (in Chinese with English abstract)
[19] 薛昊淵,連晉毅,王嘉侖,等. 阿克曼轉向模型的改進及其電子差速控制仿真[J]. 汽車實用技術,2020(10):118-121.
XUE Haoyuan, LIAN Jinyi, WANG Jialun, et al. Improvement of ackerman steering model and simulation of electronic differential control[J]. Automobile Applied Technology, 2020(10): 118-121. (in Chinese with English abstract)
[20] 時培成,陳旭,楊愛喜,等. 4WID-4WIS智能車阿克曼轉向軌跡規劃及位置估算[J]. 工程設計學報,2022,29(2):1-10.
SHI Peicheng, CHEN Xu, YANG Aixi, et al. Steering trajectory planning and position estimation of 4WID-4WIS intelligent vehicle ackerman[J]. Chinese Journal of Engineering Design, 2022, 29(2): 1-10. (in Chinese with English abstract)
[21] 羅承銘,熊陳文,黃小毛,等. 四邊形田塊下油菜聯合收獲機全覆蓋作業路徑規劃算法[J]. 農業工程學報,2021,37(9):140-148.
LUO Chengming,XIONG Chenwen,HUANG Xiaomao,et al. Coverage operation path planning algorithms for the rape combine harvester in quadrilateral fields[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 140-148. (in Chinese with English abstract)
[22] 丁幼春,張莉莉,楊軍強,等. 油菜精量直播機播種監測系統傳感裝置改進及通信設計[J]. 農業工程學報,2018,34(14):19-26.
DING Youchun, ZHANG Lili, YANG Junqiang, et al. Design and experiment of variable replanting system of precision seed metering device for rape[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(14): 19-26. (in Chinese with English abstract)
[23] 張聞宇,張智剛,羅錫文,等. 收獲機與運糧車縱向相對位置位速耦合協同控制方法與試驗[J]. 農業工程學報,2021,37(9):1-11.
ZHANG Wenyu, ZHANG Zhigang, LUO Xiwen, et al. Position-velocity coupling control method and experiments for longitudinal relative position of harvester and grain truck[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(9): 1-11. (in Chinese with English abstract)
[24] 丁幼春,楊軍強,張莉莉,等. 油菜精量排種器變量補種系統設計與試驗[J]. 農業工程學報,2018,34(16):27-36.
DING Youchun, YANG Junqiang, ZHANG Lili, et al. Design and experiment of variable replanting system of precision seed metering device for rape[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(16): 27-36. (in Chinese with English abstract)
[25] ZHANG H, ZHANG R, LI L, et al. Research on virtual Ackerman steering model based navigation system for tracked vehicles[J]. Computers and Electronics in Agriculture, 2022, 192: 106615.
[26] 蓋軍雄,雷曉春,江澤濤. 基于ROS的阿克曼機器人室內導航實現[J]. 中國體視學與圖像分析,2021,26(3):215-225.
GAI Junxiong, LEI Xiaochun, JIANG Zetao. Realization of indoor navigation of Ackerman robot based on ROS[J]. Chinese Journal of Stereology and Image Analysis, 2021, 26(3): 215-225. (in Chinese with English abstract)
[27] 陳永展,袁濤,曲建嶺,等. 不同海況等級下傳遞對準桿臂效應的影響研究[J]. 計測技術,2022,42(1):63-71.
CHEN Yongzhan, YUAN Tao, QU Jianling, et al. Study on the influence of transfer alignment lever arm effect under different sea conditions[J]. Metrology & Measurement Technology, 2022, 42(1): 63-71. (in Chinese with English abstract)
[28] 陶冶,張東良,李建利. 基于桿臂補償的多MIMU六方位倍速率標定方法[J]. 導航定位與授時,2021,8(1):168-175.
TAO Ye, ZHANG Dongliang, LI Jianli. Multi-MIMU six-azimuth multiple rate calibration method based on lever-arm compensation[J]. Navigation Positioning and Timing, 2021, 8(1): 168-175. (in Chinese with English abstract)
[29] LIU J, WANG L, LI K, et al. A compensation method of lever arm effect for tri-axis hybrid inertial navigation system based on fiber optic gyro[J]. Measurement Science and Technology, 2017, 28(5): 055103.
[30] 譚強俊,程永生,唐彬,等. 航姿參考系統的改進桿臂效應補償方法[J]. 哈爾濱工業大學學報,2020,52(5):129-136.
TAN Qiangjun, CHENG Yongsheng, TANG Bin, et al. Improved lever arm effect compensation method for attitude reference system[J]. Journal of Harbin Institute of Technology, 2020, 52(5): 129-136. (in Chinese with English abstract)
[31] 胡煉,關錦杰,何杰,等. 花生收獲機自動駕駛作業系統設計與試驗[J]. 農業機械學報,2022,53(9):21-27.
HU Lian, GUAN Jinjie, HE Jie, et al. Design and test of automatic driving operation system for peanut harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2022: 53(9): 21-27. (in Chinese with English abstract)
[32] 王輝,王桂民,羅錫文,等. 基于預瞄追蹤模型的農機導航路徑跟蹤控制方法[J]. 農業工程學報,2019,35(4):11-19.
WANG Hui, WANG Guimin, LUO Xiwen, et al. Tracking control method of agricultural machinery navigation path based on preview tracking model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(4): 11-19. (in Chinese with English abstract)
Path tracking control method and experiments for the crawler-mounted peanut combine harvester
HE Jie1,2,3, MAN Zhongxian1, HU Lian1,2,3※, LUO Xiwen1,2,3, WANG Pei1,2,3, LI Mingjin1, LI Weicong1
(1.510642,; 2.510642,;3.(-),510642)
Peanut harvesting has posed a great promise for the sustainable development in modern agriculture. This study aims to improve the path-tracking accuracy of an unmanned crawler-mounted peanut harvester on sandy land. 4HBL-2 self-propelled peanut combine harvester was taken as the research object. A systematic investigation was also carried out on the unmanned path-tracking control of the crawler-mounted harvester. The optimal relationship was established between the kinematic model of the crawler-mounted harvester and the virtual steering angle function. The course deviation was used as the observation value, whereas, the angular velocity calculated by the Ackerman model was used as the measurement value. Kalman Fusion Algorithm was also designed to obtain the virtual steering angle using the Ackerman model. The PID path tracking was improved significantly, according to the virtual steering angle. A double PID path tracking control was proposed using preview tracking. A pulse width controller was then selected to realize the accurate path-tracking control of the crawler-mounted peanut harvester. The simulation test results showed that the path tracking control method based on preview tracking double PID can perform path tracking control, and had the characteristics of smooth control and small steady-state error. There was no change in the signal period and waveform distortion. A series of field experiments show that the average absolute error and the maximum deviation of the linear tracking were 2.23, and 4.14 cm, respectively, when the peanut harvester was operated at a speed of 0.6 m/s in the sand. The performance of the improved system was enhanced by 56.12%, and 66.07%, respectively, compared with the PID path tracking controller. The path tracking experiments showed that the response duration values of the control system were 11.00, 12.92, and 13.78 s, respectively, while the corresponding distances were 6.60, 7.75, and 8.26 m, respectively, when the initial deviation was 0.5, 1.0, and 1.5 m, respectively. Specifically, the maximum overshoot was 5.68, 5.84, and 6.09 cm, respectively. The tracking path distance was reduced by 1.92%, 4.43%, and 8.71%, respectively, whereas, the overshoot was reduced by 8.45%, 17.56%, and 5.17%, respectively, compared with the wheeled harvesters. The maximum deviation and average absolute error of the peanut harvester were 5.87 and 2.72 cm, respectively. The ratios of deviation within ±5 cm and ±10 cm were 97.11%, and 100%, respectively. The general technical conditions were also compared for the post-installation of the satellite navigation automatic driving system of agricultural machinery in the industry standard. The connection performance of the crawler peanut harvester can be expected to meet the high requirements of the connection performance. The path tracking control accuracy of the crawler-mounted peanut harvester can also fully meet the harsh requirements of unmanned operation in sandy land.
agricultural machinery; harvest; path planning; peanut; preview control; virtual Ackerman
2022-08-08
2022-12-25
廣東省人工智能實驗室項目(2021B1212040009);嶺南現代農業科學與技術廣東省實驗室科研項目(NT2021009);國家花生產業技術體系(CARS-13)
何杰,博士,高級實驗師,研究方向為智能農機裝備。Email:hooget@scau.edu.cn
胡煉,博士,博士生導師,研究員,研究方向為智能農機裝備。Email:lianhu@scau.edu.cn
10.11975/j.issn.1002-6819.202208067
S24; TP273
A
1002-6819(2023)-01-0009-09
何杰,滿忠賢,胡煉,等. 履帶式花生聯合收獲機路徑跟蹤控制方法與試驗[J]. 農業工程學報,2023,39(1):9-17. doi:10.11975/j.issn.1002-6819.202208067 http://www.tcsae.org
HE Jie, MAN Zhongxian, HU Lian, et al. Path tracking control method and experiments for the crawler-mounted peanut combine harvester[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(1): 9-17. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202208067 http://www.tcsae.org
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
