星載GNSS-R 監測海面目標技術進展
2023-03-23 11:36:16胡媛顧世森劉衛江志豪袁鑫泰
全球定位系統 2023年1期
胡媛,顧世森,劉衛,江志豪,袁鑫泰
(1.上海海洋大學 工程學院 上海 201306;2.上海海事大學 商船學院 上海 201306)
0 引言
海洋占地球表面的71%,因此進行海面目標監測,對于國家海洋安全和海洋資源使用具有重要意義.對海冰、海面溢油以及海面船舶等實現精確實時監測,具有廣泛的應用,如海面實施管控,監視海面交通,海洋污染監測.
傳統的海面目標監測技術有微波監測和光學監測技術.光學監測技術中的遙感器容易受到天氣影響,不能全天候的監測海面目標.微波遙感技術不受天氣影響,具有全天候監測能力,但是對于大范圍的海面目標進行持續監測,所需成本極高,并且由于它的觀測模式為側視掃描,成像會存在大量噪點,影響監測精度.全球衛星導航反射信號(GNSS-R)技術是一種新興的遙感手段,是由歐空局科學家Martinneria[1]于1993年首次提出的被動反射和干涉系統(PARIS)的理論概念,其主要思想是利用導航衛星海面反射波作為測距信號.GNSS-R 技術不需要專門的發射機,在軌的導航衛星提供了豐富的免費信號,因此降低了監測成本[2].降雨、大霧等惡劣天氣對反射信號的影響較小,有利于實現長時間對海面進行監測.GNSS-R 技術的引入,可以與傳統海面監測方法做到優勢互補.
1 GNSS-R 監測海面目標平臺
使用GNSS-R 對海面特征參數進行反演的應用,Hall等[3]于1988年提出利用GPS 散射信號測量海面的設想.利用GNSS-R 進行海洋微波遙感,已成為GNSS 除了導航定位應用之外新的研究方向.這種新的海洋遙感手段,無需發射機、信號源豐富、時空分辨率高、成本低,是一種新型的全球海洋遙感數據采集手段.按照數據來源分類,可以將GNSS-R 數據分為:岸基、機載和星載數據.
1.1 岸基GNSS-R
通常將接收天線架設在岸邊相對較高的地方,例如近海的巖石、高建筑或者山頂上,接收到的數據為岸基GNSS-R 數據.岸基GNSS-R 數據可以對特定區域進行長期穩定的觀測,對近海域的監測具有重要作用.Soulat等[4]利用岸基GNSS-R 數據驗證了反射信號時間序列與有效波高的關系.Fabra等[5]利用歐洲空間局在格陵蘭島迪斯科海岸采集的GPS 數據,使用相干相位差法對海冰進行監測,得到了較好的結果.1997年,Martin-neria等[6]在荷蘭的Zeeland 橋利用岸基GNSS-R 數據進行了PARIS 高度計橋I、橋Ⅱ和橋Ⅲ試驗,三次實驗均反演出海面高度,其中實驗橋Ⅲ試驗測量誤差小于10 cm[7].文獻[8]利用北斗衛星岸基反射信號數據進行了特定的污油池油膜進行了監測實驗,對油面的介電常數特性進行了研究.發現當水面有油污時,介電常數反演結果均值為3.6,標準差為2.13,這與油的真實介電常數范圍2.0~4.5 一致,遠小于海水介電常數,證明了應用岸基GNSS-R數據監測海面溢油具有可行性.
由于岸基接收機平臺架設固定,高度低、探測區域有限,接收的反射信號數據相對于星載和機載數據,具有信號強度高、信號間相關性強和信號在時間延遲的拓展小等特點.岸基GNSS-R 數據在監測近海域海面具有廣泛應用,不適用于遠海岸和大范圍區域.
1.2 機載GNSS-R
GNSS 信號接收機架設在飛機或其他飛行器上,可以得到機載GNSS-R 數據.1994年一架飛機偶然捕獲到經海面反射的GPS 信號[9],隨后對機載GNSS-R 數據進行了大量研究.1999年,NASA 蘭利研究中心的研究人員通過對兩組機載GNSS-R 數據與雷達衛星散射測量結果的研究發現[10],中等高度的接收機采集到的數據能夠明顯區分海冰和海水的反射系數.2000年,NOAA 利用颶風獵人號飛機搭載GNSS-R 接收機,通過機載數據成功獲取風速[11].2004年,Ruffini等[12]進行了低空機載測量海面高度實驗,并將結果與Jason-1 衛星測高結果進行比較,精度可達到10 cm.文獻[13]利用安裝在飛機上的多普勒延遲測繪接收機,在三亞附近海域進行了實時數據采集活動.初步實驗結果表明,機載GPS 反射信號數據可以很好地用于艦船目標檢測.2013年,Rodriguezalvarez等[14]通過對機載GNSS-R數據分析,建立了延遲多普勒圖(DDM)與風速的線性關系,表明了DDM 可以提供更好的反演精度.2016年,文獻[15]對加利福尼亞蒙特雷灣得到的機載GNSS-R 數據進行分析,使用三種反射信號到達時間跟蹤算法,測量海面高度的精度達到0.6 cm.
機載數據與岸基數據均是對靠近海岸區域的監測,對星載監測海面起到補充作用.相對于岸基GNSS-R 數據,機載GNSS-R 數據可以對更遠、更廣的區域進行監測,并且接收機是安裝在飛行器上,所以可以對監測區域進行靈活選擇.但是由于機載探測海面時,飛行器的高度相對于岸基接收機的平臺較高,GNSS 反射信號之間的相關性下降,岸基數據中觀測量的敏感度會降低.
1.3 星載GNSS-R
接收機被搭載到小型衛星上進行反射信號收集,得到星載數據.星載GNSS-R 數據的發射衛星源較多,并且具有高時空分辨率,可以實現全天候、全天時、廣覆蓋的地球表面參數反演,與岸基、機載數據形成互補.1996年,Katzberg等[16]進行了有關在太空中使用接收器從海洋中接收散射GPS 信號的理論研究,Lowe等[17]對星載GPS 信號數據進行了首次研究.文獻[18-20]通過獲取UK-DMC 兩組星載GNSSR 數據對海冰進行了監測,一組于2005年2月4日在阿拉斯加海岸附近獲得,另一組于2005年6月23日在南大洋南極洲附近獲得.通過與現場海冰數據驗證,由第一組數據得到區域90%面積被30~70 cm 的海冰覆蓋,第二組數據得到了海冰濃度介于70%~90%.2014年,英國發射了全球首個技術演示衛星(TDS-1),公布了數百萬的GNSS-R 星載數據,這為研究人員推進研究提供了便利.Yan等[21]利用TDS-1 星載數據對海水和海冰進行了監測,結果表明,對海水和海冰的分辨率可達到99.73%.
通過在各種平臺上部署多個GNSS-R 接收機,可以在全球和區域范圍內實現時間和空間密集覆蓋.以旋風全球導航衛星系統(CYGNSS)為例:平均重訪時間為4 h[22],非相干散射的空間分辨率約為10 km,相干散射的空間分辨率約為500 m[23].
2 星載GNSS-R 監測海面常用方法
第一次獲得的星載GNSS-R 數據來源于英國災害監測星座(UK-DMC)衛星.文獻[24-28]應用數據對海冰進行了監測.通過現場海冰驗證,對兩組星載GNSS-R 數據進行驗證,發現DDM 中表現出較強的峰值和較小的擴散.它們的差異說明,粗糙的海水表面會降低整體相干鏡面反射,并導致較大的閃爍區.分析表明,利用星載GNSS-R 監測海冰區域是可行的.此外,不同的信號功率、時延和多普勒擴展程度與不同的海冰厚度有關,說明GNSS-R 具有監測海冰厚度的潛力.文獻[19]中提到,對于從冰面反射的相干信號,可以恢復載波相位信息以進行精確的測高測量.2014年TDS-1 發射后,數百萬的GNSS-R 的 DDM數據已向公眾提供,這為研究人員提供了更多研究機會.使用TDS-1 的DDM 于海冰監測的實驗有文獻[24-27],現有的研究主要集中在監測海冰厚度和海面船舶和溢油等方面.由于監測海面目標的方法種類繁多,將在第2.2-2.4 節中討論.分別從基于DDM、基于散射系數反演監測和基于機器學習監測三種方法總結了監測海面目標的研究進展.
2.1 基于DDM 觀測值信息提取
海面閃爍區散射功率在時間延遲和多普勒延遲的映射被稱為DDM,如圖1 所示.TDS-1 獲取的DDM 數據首次應用于監測的海面目標是海冰[28],使用的是評估DDMs 中提取的監測值.同時,文獻[24]研究了不同觀測值下的海冰探測應用.DDM觀測值最初是用來描述DDM 的擴散程度,它由表面粗糙度決定,用來監測海面目標的觀測值[29-35],描述如下:
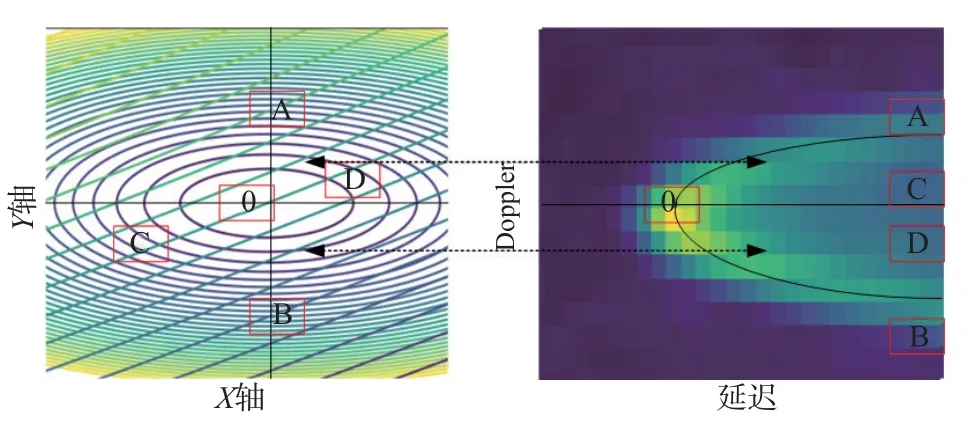
圖1 DDM 示意圖
1)比預設閾值的DDM 具有更大功率的DDM像素數.
2)標準化的DDM 的功率總和.
3)從標準化DDM 中心像素點[GCT,GCF]到最大像素點[MAXT,MAXF]的距離,計算公式為
式中,G Cτ和G Cf分別為延遲和多普勒像素的平均值.
4)歸一化DDM 在其峰值附近的平均值.
5)多普勒積分波形的斜率.
6)所獲得的多普勒積分波形和Woodward 模糊函數(WAF)的多普勒之間的相關系數.
7)目標區域的標準差.
目標DDMs 與海水DDMs 的區別在于擴散程度不同,典型的海水DDMs 具有更大的擴散性.上述觀測值能夠描述DDM 的傳播范圍.對于1)~4)觀測值,較大的值對應于更大的擴散.然而,對于5)~7)觀測值,較小的值表示更大的擴散.因此,可以通過將可觀測到的DDM 值與其相應的閾值進行比較來實現海面目標監測.
2.2 基于散射系數目標反演
利用DDM 觀測數據進行海面目標監測是一種有效的方法.然而,詳細空間分布很難利用這些觀測值來解釋.通過將散射系數(σ0)反演到空間域中,文獻[36-41]提供了監測海面目標及其分布的新方法.文獻[36-37]是基于反卷積法.文獻[38-39]中的方法涉及空間積分法(SIA).文獻[40-41]中的方法是基于二維截斷奇異值分解(TSVD).DDM 描述了GNSS-R,可使用Zavorotny-Voronovich(ZV)模型[39]進行描述,GNSS-R 二維相關功率可以表示為二維卷積
χ為伍德沃德模糊函數(WAF),可以表示為
式中:Ti為相干積分時間;τc是C/A 碼芯片的長度.
Σ為Sigma 函數,它包含了表面特性、幾何結構、天線方向圖.2009年在文獻[41]提出了延遲和多普勒值的顯式表達式,利用空間和延遲-多普勒域之間對應關系,通過雅可比矩陣快速計算DDMs.Sigma函數被表示為
式中:D為天線輻射模式;σ0為觀測表面的散射系數;R0為每個表面點到接收器的距離;R為每個表面點到發射器的距離;J為從物理域到延遲多普勒域的域變換產生的Jacobian 函數.
在反演散射系數時,需要先獲得Sigma 函數.可以應用以下三種方法.
2.2.1 反卷積法
首先利用CLS 濾波器,由等式(2)得到Sigma 函數的估計值
將(8)式代入(7)式中得到
式中,P為平滑準則函數,由 γ參數加權.將得到Sigma 函數的估計值代入式(6)中,得到表面散射系數
2.2.2 基于空間積分法
通過精確地考慮每個空間點的貢獻,基于ZV 模型首次提出SIA[42].將式(2)中Sigma 函數表示為
式中,A為反射面的面積.用反卷積方法中的公式求得Sigma 函數的估計值,代入式(11)中得到散射系數
此方法中,由于 δ函數的影響,每個延遲多普勒(DD)點的積分范圍是其對應的空間點簇.所以此方法的優點是,在整個DD 域中確定散射系數只需對每個空間點進行一次積分.利用空間域和DD 域之間的關系,可以將DD 域中的散射系數分布映射到空間域中.2014年,Li等[43]對監測海面溢油進行了研究,將星下點溢油監測的仿真場景(90°的固定仰角)擴展到任意角度,進一步擴展了星載GNSS-R 監測海面的衛星仰角范圍.
2.2.3 TSVD
Schiavulli等[44]提出了一種基于TSVD 的反演方案,從包含不同非均勻區域的模擬海洋場景相關的噪聲DDM(包括熱噪聲)中重建散射系數.首先,功率分布的數學表達式為
從數學的觀點出發,式(13)表達為
式中:L(·)為卷積算子;X為散射功率;B為相對應的DDM.將X和B矢量化后,式(13)可以寫成矩陣形式
式中:A是一個n×n矩陣,其大小使得Ax近似于式(14);b是測量DDM 的離散化值.
用正則化方法求解方程(14).正則化方法的基本思想是使殘差范數最小.該方法可以表示為
式中,P代表進行最小化的空間.根據二維TSVD 方法[45],通過奇異值分解得到式(15)的解,使用截斷奇異值分解來濾除含噪的奇異值,得到正則解.因此,TSVD 解中只包含前k個奇異值
這三種方法都能定性地監測到海面目標的存在.然而,基于二維TSVD 的方法依賴于視覺檢測來解決模糊問題,可能耗時且不能自動進行,意味該方法的應用范圍十分有限.
2.3 基于機器學習監測海面目標
近年來,因為機器學習能夠直接從數據中構建遙感數據與目標遙感數據之間的關系,所以它被作為一種新的遙感圖像處理方法而廣泛使用.此外,機器學習方法已經成功地應用于海冰監測,例如,合成孔徑雷達[46]、高度計[47]和被動微波數據[48].一般的機器學習過程包括三個步驟:遙感數據的預處理、訓練和測試.星載GNSS-R 數據進行目標監測的機器學習技術主要有三種.
2.3.1 神經網絡
在輸入到神經網絡(NN)之前,每個DDM 都經過了噪聲去除、歸一化和數據拉伸的預處理.為了減輕噪聲影響,每個DDM 去除噪聲底,該噪聲底被確定為無信號像素(包含所有多普勒像素的前四個延遲像素)的平均值.比如,TDS-1 的DDM 數據由128 個延遲單元(分辨率244 ns)和20 個多普勒單元(分辨率500 Hz)組成.然后每個DDM 根據其峰值功率進行歸一化,峰值功率由DDM 中的局部極大值確定.基于局部極大值選擇信號值,然后將二維信號值轉化為一個字典序向量,該向量包含800 個元素,是NN的輸入.
利用所構造的神經網絡,訓練過程開始確定權重和偏差,可采用反向傳播學習[49]和Levenberg-Marquardt算法[50].詳細公式見文獻[51].利用DDM 數據的訓練集及其對應的海水/冰標簽數據進行學習,將處理后的DDM 輸入訓練后的神經網絡,生成海冰監測結果.
2.3.2 卷積神經網絡和支持向量機
與NNs 相比,卷積神經網絡(CNN)部署了額外的卷積層.卷積層直接與輸入的二維DDM 交互,保持相鄰DDM 像素之間的相關性.池層的使用有助于減少數據中的冗余,并使CNN 對DDM 數據的不對稱敏感性降低.CNN 的數據預處理比NN 少,包括噪聲去除和歸一化.文獻[52]設計了一個CNN 架構,包含1 個卷積層(由5 個7*7 濾波器組成),然后是1 個2*2 池層和2 個完全連接層(其功能類似于NN的輸入層和隱藏層).卷積層φ的使用可以描述為
式中,a、b、hk和Hk是輸入、偏差、第k卷積圖像(k∈[1,5])和濾波器.*為卷積運算.
支持向量機(SVM)[53]能夠通過找到一個超平面來進行分類任務,并且能夠提供比其他分類模型更好的精度[54-55].在文獻[55]中,除了噪聲歸一化外,還進行了另一個特征提取過程作為預處理,即計算每個多普勒沿延遲軸的平均值.這樣一個由20 個元素組成的數組被其最大值歸一化,并因此保留為特征向量.
通過分析發現,當使用原始輸入大小時,基于CNN 的海冰監測顯示出比基于NN 更高的精度.CNN 的一個優點是在卷積層結合濾波器,可以降低DDM 中的噪聲.卷積層和池層使得CNN 對DDM 反射點的不對稱敏感性降低.然而,當通過裁剪DDM對數據進行適當預處理時,CNN和NN 都可以產生良好的結果.基于SVM 的目標監測方法相對于基于NN和CNN(以原始DDM 圖像為輸入)的方法具有更高的精度.
3 結束語
表1 總結了利用星載GNSS-R 進行的海面目標監測研究.基于機器學習的方法相對于基于DDM 觀測值的方法,在監測海冰時候的檢測精度有所提升.這是因為,機器學習完全依賴于數據的學習過程進行分類,而DDM 觀測值是基于研究者的篩選.海冰DDMs 與海水DDMs 之間的差異是明顯的,可以用推導得到的觀測值進行研究.因此,利用DDM 觀測值進行海面目標監測的結果精度具有真實性.利用星載GNSS-R 監測海面目標類型分類和具體規模等復雜問題具有難度,在這種情況下可以采用與岸基GNSS-R、機載GNSS-R 相結合,實現更復雜的監測.

表1 星載GNSS-R 監測海面目標的應用
全球氣候變化關系到人類的可持續發展,海洋面積占全球面積71%,在全球氣候變化研究中占據重要地位,而系統的高質量連續獲取海洋環境的信息又是實現高水平海面變化研究的前提條件.在現有的探測海面體系中,應當有效地將基于衛星遙感觀測與近海站點觀測相結合,將近海海面和大洋面監測相銜接.需加快建立以衛星為主的空基平臺、星載平臺、沿海觀測站點和GNSS 聯合的海平面綜合監測體系,進而構建長期、連續、穩定的高質量海平面監測模式,為海面監測和全球氣候變化研究等提供有力保障.
猜你喜歡
海洋通報(2021年3期)2021-08-14 02:20:38
成都信息工程大學學報(2021年2期)2021-07-22 07:23:32
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子技術與軟件工程(2016年24期)2017-02-23 19:13:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國學術期刊文摘(2016年8期)2016-02-13 13:04:44
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
河北遙感(2014年4期)2014-07-10 13:54:59