MEMS陀螺半實物仿真系統設計*
2023-03-22 01:35:54王燦斌劉志鵬邢昌達
飛控與探測 2023年5期
王燦斌,劉志鵬,邢昌達,李 崇
(中國海洋大學 工程學院·青島·266100)
0 引 言
MEMS陀螺是慣性傳感器的一種,可以用于測量角速度和旋轉角度,具有非常廣泛的應用范圍[1-2],在姿態檢測、導航、定位等領域均占有一席之地[3-4]。自DARPA實驗室成功研發世界上第一只MEMS陀螺以來[5],其性能隨精密加工工藝的發展和機械結構的優化而不斷提高。然而,由于現有加工精度和可用調制方法的限制,MEMS陀螺測控方法的發展受到制約。因此,為解決因MEMS固有缺陷所帶來的發展受阻問題,將半實物仿真(Hardware-in-loop Simulation,HILS)技術應用在MEMS陀螺上成為了一個新的研究方向。
HILS技術是一種特殊的仿真技術,該技術通過將現實世界中的一些關鍵對象附加到仿真中,使得此種仿真比一般仿真更為可靠[6]。此外,該技術在高復雜度模型的仿真中也具有很大優勢[7],它不需要模擬對象的精確數學模型,因此可以減少系統建模的工作量,縮短研發時間。同時,可以通過HILS系統的輸出結果對其數學模型進行校正[8]。因此,將HILS技術應用于MEMS陀螺的機理研究和接口系統開發,為打破MEMS陀螺固有特性的制約提供了新思路。
HILS技術最初的發展地在美國,為了開展對于控制系統的仿真,美國在20世紀40年代建立了一批用于半實物仿真的實驗室,在此基礎上,半實物仿真技術得到不斷發展。在近幾十年的發展中,美國各武器研發系統均針對自身需求制定了復雜先進的仿真系統,其中以紅石兵工廠的美國陸軍航空和導彈司令部高級仿真中心最為著名[9]。將HILS技術應用于MEMS 陀螺研究方案最初是由佐治亞理工學院的Arashk Norouzpour-Shirazi在2016年提出[10],該團隊通過構建等效RLC電路對MEMS陀螺進行建模,并對內部參數變化對性能的影響進行了軟件仿真。盡管該仿真僅在軟件級別實現,并且沒有提供硬件工程實例,但這仍為將HILS仿真系統應用于MEMS陀螺提供了參考。
本文首先從MEMS陀螺的基礎數學模型出發,分析MEMS陀螺和RLC振蕩電路特征方程上的相似性,完成對MEMS陀螺基本的HILS電路模型的設計。然后,在充分考慮MEMS陀螺的模態間耦合、輸入輸出特性、頻率特性等本身性質的基礎上,將這些固有特性也添加到HILS系統中。最后,在HILS系統模型設計的基礎上,完成HILS系統硬件電路的開發以及對該系統的測試。通過實驗結果來證明將HILS技術應用于MEMS陀螺特性仿真及接口電路開發的可行性,以及驗證該HILS系統可成為一個可靠的MEMS陀螺內部機理研究和接口電路方案驗證的平臺。
1 MEMS陀螺的HILS等效電路原理分析與設計
首先進行MEMS陀螺基本動力學分析,闡述其運行的基本原理。而后從MEMS陀螺的基本原理出發,通過對比其單模態動力學方程與RLC電路特征方程的形式[11],說明利用RLC電路模擬MEMS陀螺基本輸入輸出特性的可行性,為下一節的MEMS陀螺HILS系統硬件電路設計奠定理論基礎。
1.1 MEMS陀螺動力學分析
MEMS陀螺是基于科里奧利力效應工作的傳感器器件,科里奧利力效應表示傳感器件的兩個正交共振模式之間因為外部旋轉而產生能量傳遞的效應,又稱科氏力。在旋轉過程中,原本進行直線運動的質點因為科里奧利力發生偏移,旋轉角速度不同,其偏移量大小不同,因此可以通過其偏移量大小得到旋轉角速度大小。科里奧利力可以表示為
fC=2mv×Ω
(1)
其中,m為質點的質量,v為質點相對于轉動坐標系的運動速度,Ω為旋轉的角速度。
MEMS陀螺的兩個模態可以等效為兩個獨立的諧振器,為“阻尼—彈簧—質量塊”組成的二階系統,在受到驅動力的作用以后,質量塊會在力的方向上產生簡諧運動。與此同時,因為科里奧利力的作用,另一模態會產生科氏力加速度,從而在本身諧振方向上做簡諧運動,通過位移信息可得輸入的角速度。
MEMS陀螺的基本物理模型如圖1所示,理想情況下,陀螺兩個運行模態不存在相互的剛度和阻尼耦合,其數學模型表示如下
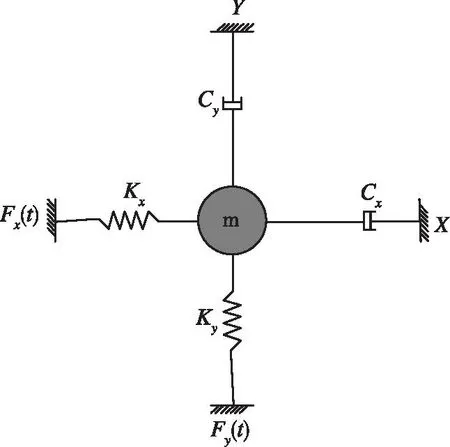
圖1 理想陀螺物理模型Fig.1 Ideal gyro physical model
(2)
其中,mx為x模態質量,my為y模態質量。x,y為陀螺的兩個振動模態上的位置坐標,dx和dy為兩模態沿各自軸的阻尼系數,kx和ky為兩模態沿各自軸的剛度系數,Ωz為外部角速度,λ為角度增益系數,fx(t)和fy(t)為兩模態的驅動力輸入。
實際情況下,兩模態難以避免會產生剛度耦合和阻尼耦合。考慮剛度耦合和阻尼耦合的非理想情況下陀螺的物理模型,如圖2所示,其數學模型可表述為
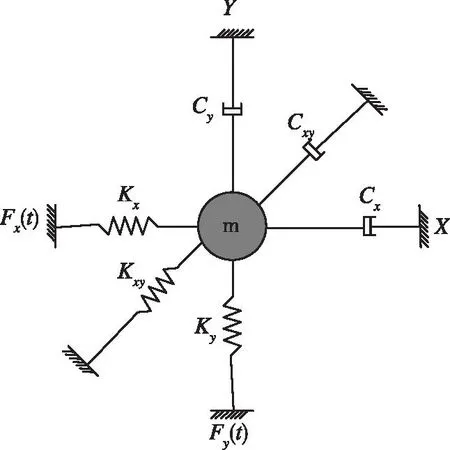
圖2 非理想陀螺物理模型Fig.2 Non-ideal gyro physical model
(3)
其中,dxy與kxy為兩模態之間的阻尼耦合與剛度耦合系數。
1.2 MEMS陀螺等效電路設計可行性分析
理論上,MEMS陀螺單模態動力學方程為
(4)
其中,x是指質量塊在單個振動模態上的位移,k為剛度系數,d為阻尼系數。
公式(4)是一個二階線性常系數微分方程。RLC串聯電路的特征方程與該動力學方程具有相同方程形式,因此選擇RLC電路模型作為MEMS陀螺的等效電路模型[8]。
一個基本的RLC串聯電路如圖3所示,由一個電阻、一個電容和一個電感串聯而成。電容兩端的電壓定義為UC,電阻、電容和電感值分別被定義為R,C和L。在上述電路中滿足式(5)、(6)、(7)
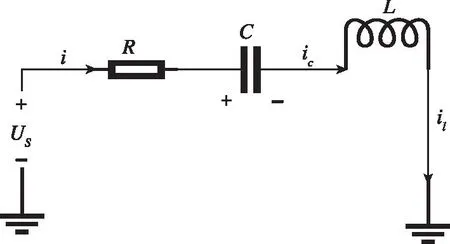
圖3 RLC振蕩電路模型Fig.3 RLC oscillation circuit model
(5)
(6)
(7)
可得RLC電路模型方程如下
(8)
式(8)為RLC電路的模型方程,與式(4)MEMS陀螺的基本動力學方程具有相似形式,由此可得二者具有相似的輸入輸出特性,故選擇RLC串聯電路作為MEMS陀螺單模態等效電路,其中的位移和力由電荷和電壓表示,速度由電流表示,質量系數m由電感L表示,剛度系數k由電容的倒數1/C表示,阻尼系數d由電阻R表示。采用變壓器作為驅動諧振器并感測其位移的轉換機構。考慮到MEMS陀螺有兩個模態,其基本等效電路的示意圖如圖4所示。
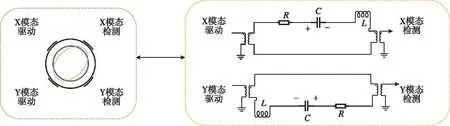
圖4 MEMS陀螺與其等效電路模型示意圖Fig.4 Schematic diagram of MEMS gyroscope and its equivalent circuit model
圖4左側展示了真實MEMS陀螺的輸入輸出電極。實際情況下,可通過驅動電極輸入正弦信號完成對單個模態的驅動,并通過檢測電極來檢測角度和角速度信號。圖4右側MEMS陀螺等效電路中,MEMS陀螺單個模態被等效為一個RLC串聯電路的閉合回路,可通過驅動模態變壓器輸入正弦驅動信號,完成對電路的驅動,并通過檢測模態變壓器檢測回路在驅動下產生的信號,完成對MEMS陀螺驅動和檢測的模擬。
2 硬件電路實現
在MEMS陀螺等效電路中,模態間的耦合與模態自身的耦合以受控源的方式實現,受控源指的是受電路中其他電流或電壓信號控制的電流源或電壓源,主要分為四種,分別是電壓控制電壓源(Voltage Controlled Voltage Source,VCVS)、電流控制電壓源(Current Controlled Voltage Source,CCVS)、電壓控制電流源(Voltage Controlled Current Source,VCCS)、電流控制電流源(Current Controlled Current Source,CCCS)[12]。在本設計中,涉及的受控源有電壓控制電壓源與電流控制電壓源。由第1章中MEMS陀螺HILS系統電路原理可知,系統主要分為五個功能板塊,分別是電源、阻尼耦合、剛度耦合、角速度輸入、主體諧振電路。下面將對這些功能對應電路做詳細的描述。
2.1 MEMS半實物仿真系統功能實現
2.1.1 阻尼耦合電路設計
由于加工工藝限制,陀螺機械結構存在不同程度的結構不對稱性,這導致兩模態之間存在阻尼耦合與剛度耦合,使得陀螺存在同相誤差與正交誤差。阻尼耦合在等效電路中的表達式為Rxyiy與Ryxix,可以等效為將y模態中的電流iy放大Rxy倍,或者將x模態中的電流ix放大Ryx倍,因此稱為電流控制電壓源。其實現方式如圖5所示,其中Ix,Iy代表x模態和y模態的電流,Ryx代表y模態與x模態間的耦合電阻值,此圖以x模態在y模態的耦合項為例。
2.1.2 剛度耦合電路設計
剛度耦合在等效電路中的表達式定義為VQx=(Cy/Cyx)VCy與VQy=(Cx/Cxy)VCx,等效為將x模態電容兩端的電壓放大Cx/Cxy倍、將y模態電容兩端的電壓放大Cy/Cyx倍,然后通過互感器耦合到另一模態上,采用電壓控制電壓源的方式實現,其實現方式如圖6所示,其中C代表等效電路中的電容,將電容兩端的電壓放大并耦合到另一模態,該圖以x模態在y模態的耦合項為例。
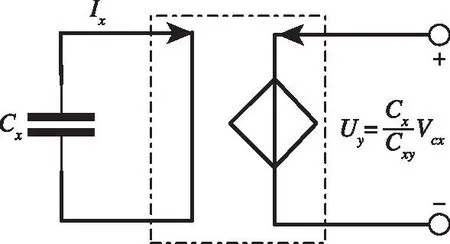
圖6 剛度耦合實現電路示意圖Fig.6 Schematic diagram of stiffness coupling implementation circuit
2.1.3 科里奧利力輸入電路設計
科里奧利力在等效電路中的表達式定義為2LmλΩziy與-2LmλΩzix,其中Lm為兩模態間耦合電感,等效為將x模態上的電流或者y模態上的電流放大-2LmλΩz與2LmλΩz倍,然后耦合到另一模態上。為實現不同的角速度輸入,角速度輸入Ωz用電壓等效,即將x模態上的電流或者y模態上的電流放大-2Lmλ與2Lmλ倍,繼而輸入至乘法器的一個輸入端,乘法器的另一輸入端引入表征角速度Ωz的等效電壓。科里奧利力輸入的實現電路示意圖如圖7所示。該示意圖以x模態作為驅動模態、y模態作為檢測模態,將x模態電流放大-2Lmλ倍,然后通過增益可調乘法器(Variable Gain Amplifier,VGA)將電流放大Ωz倍,即引入角速度,最后將輸出耦合至y模態,即科里奧利力輸入。
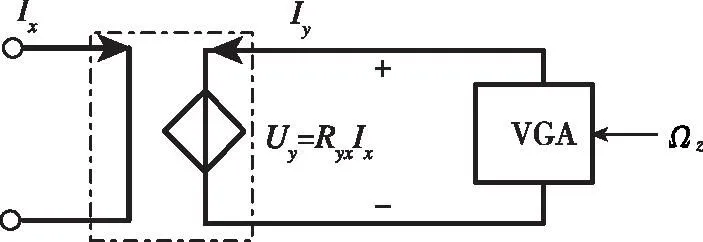
圖7 科里奧利力輸入實現電路示意圖Fig.7 Coriolis force input implementation circuit schematic diagram
2.1.4 調諧電壓輸入電路設計
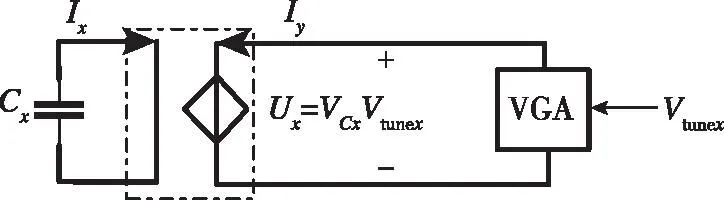
圖8 調諧電壓輸入實現電路示意圖Fig.8 Schematic diagram of tuning voltage input implementation circuit
2.2 MEMS半實物仿真系統電路實現
2.2.1 電源電路
為滿足乘法器及運算放大器供電要求,供電采用±10V電源供電,并加入4.7μF與0.1μF電容濾波以降低外部干擾對電源的影響,供電電路圖如圖9所示。
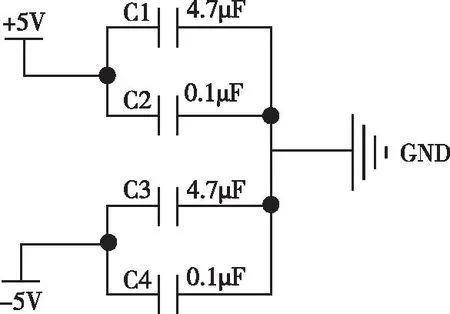
圖9 電源供電原理圖Fig.9 Power supply schematic diagram
2.2.2 剛度耦合電路
剛度耦合是將諧振電路的電容兩端的電壓差放大Cy/Cyx倍,然后耦合到另一模態上。為避免對諧振電路產生諧振點影響,采用電壓跟隨器采集電容兩端的電壓,兩電壓從兩運算放大器的正輸入端引入,然后通過乘法器將壓差乘Cy/Cyx倍,輸入到另一模態中,完成剛度耦合。剛度耦合電路原理圖如圖10所示。
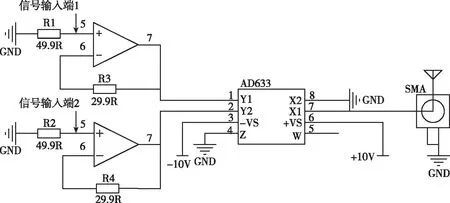
圖10 剛度耦合原理圖Fig.10 Stiffness coupling principle diagram
2.2.3 阻尼耦合電路
阻尼耦合是將諧振電路中的電流與耦合電阻相乘,即為跨阻放大電路。為了可以任意設定耦合電阻大小,將跨阻放大器的電阻更換為可變電阻。電流信號可從互感器獲取,阻尼耦合電路原理圖如圖11所示。
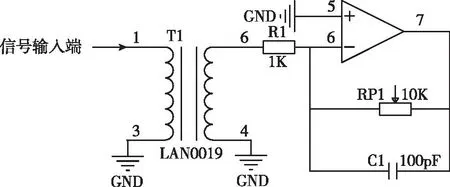
圖11 阻尼耦合原理圖Fig.11 Damping coupling principle diagram
2.2.4 角速度輸入電路
等效角速度即科里奧利力的表達式為2LmλΩzix/y,相當于將兩模態的電流乘以2LmλΩz倍,然后耦合到另一模態中。在本設計中,將2Lmλ等效為電阻,角速度Ωz等效為電壓,則2LmλΩzix/y可以等效為2Lmλix/y電壓與Ωz電壓相乘。科里奧利力輸入的電路原理圖如圖12所示。
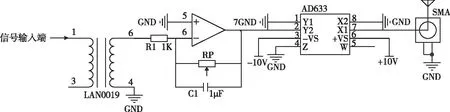
圖12 角速度輸入電路原理圖Fig.12 Schematic diagram of angular rate input circuit
2.3 MEMS陀螺等效電路完備性設計
2.3.1 阻尼耦合項、剛度耦合項和角速度輸入功能設計
由于實際MEMS陀螺存在剛度耦合項、阻尼耦合項及角速度輸入功能,因此本文設計的HILS等效電路模型若要完整模擬MEMS陀螺特性,則RLC等效電路中也應添加實際MEMS陀螺中的剛度耦合項和阻尼耦合項及角速度輸入功能。如2.1.1,2.1.2和2.1.3中所設計的受控源電路,剛度耦合項、阻尼耦合項及角速度輸入功能都將以受控源的形式實現。包含上述三種功能的HILS模型電路的示意圖如圖13所示,藍色區域是剛度耦合項、阻尼耦合項和等效角速度輸入項,通過引入三個受控源電路,可將一個模態產生的信號輸入到另一個模態中,實現剛度耦合和阻尼耦合,并完成等效角速度的輸入。
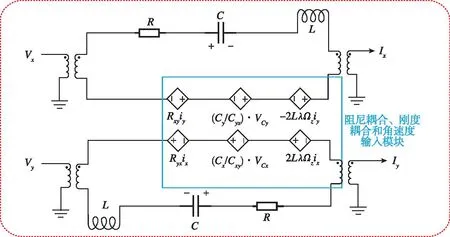
圖13 含有剛度耦合項、阻尼耦合項、等效角速度輸入項的等效電路示意圖Fig.13 Equivalent circuit diagram containing stiffness coupling term,damping coupling term,and equivalent angular rate input term
2.3.2 諧振頻率調節和Q值調節設計
由于加工批次的不同,不同陀螺的諧振頻率和Q值是會產生變化的。為了滿足模擬不同陀螺的工作要求,應設置諧振頻率和Q值調節功能。
RLC串聯電路的方程為關于電容電壓UC的常系數二階微分方程。其特征方程為
(9)
對該式求解可得
(10)
因此,MEMS陀螺等效HILS電路的諧振頻率可以用以下公式表示
(11)
由式(11)可得,可以通過調整電感L和電容C的值來進行諧振頻率的調節,具有調諧功能的電路如圖14所示,其中藍色區域代表頻率調節功能模塊,通過受控源引入調諧電壓,兩模態電容兩端的電壓與所需調節電壓相乘,然后通過互感器耦合至自身模態,完成調諧功能。當電路工作在諧振狀態時,電路中電感的阻抗和電容的阻抗大小相等,符號相反。
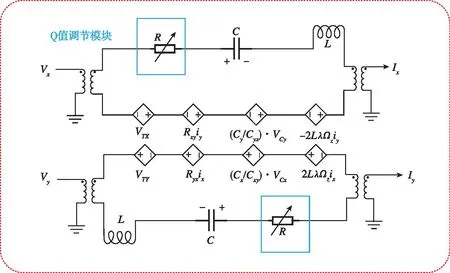
圖14 具備調諧電極的陀螺等效模型電路示意圖Fig.14 Schematic diagram of the equivalent model circuit of a gyroscope with tuning electrodes
在 RLC 諧振電路模型中,根據品質因數Q值定義,電路工作在諧振狀態時,電路中電感的阻抗ZL和電容的阻抗ZC大小相等,符號相反。因此,MEMS 陀螺的 Q 值可以由以下公式表示
(12)
具有Q值調節功能的HILS模型電路如圖15所示,其中藍色區域代表Q值調節功能,將原RLC電路中電阻替換為可變電阻,由公式(12)可知,可通過調節電阻的值R實現Q值的調節。
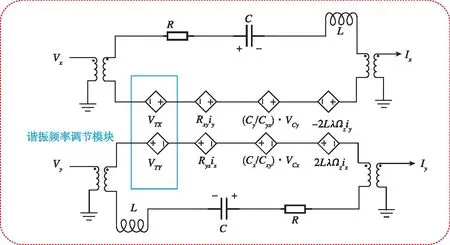
圖15 具備調諧電極與Q值調節功能的MEMS陀螺等效電路模型Fig.15 MEMS gyroscope equivalent circuit model with tuning electrode and Q value adjustment function
2.4 總體電路實現
總體諧振電路中包含了可調電阻、可調電容、工字電感、激勵輸入端、信號輸出端等基本諧振電路所需器件。除此之外,還接入了互感器實現耦合信號的輸入與輸出。同時,為方便調試,將每一個節點處接入跳線帽,通過調節跳線帽的插拔來按照需求引入耦合量,便于測試。
陀螺等效電路3D電路圖及其與等效電路模型圖對應關系示意圖如圖16所示,圖中紅色部分為HILS系統模型的兩個模態驅動輸入接口,黃色部分為剛度耦合、阻尼耦合模塊以及調諧電壓,綠色部分為等效角速度輸入功能模塊,藍色部分為兩模態信號的檢測接口。
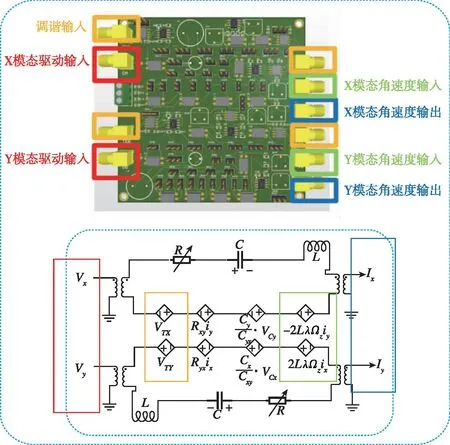
圖16 陀螺等效電路3D電路圖及其與等效電路模型圖關系示意圖Fig.16 3D circuit diagram of the gyroscope equivalent circuit and its relationship with the equivalent circuit model diagram
HILS模型的硬件如圖16中所示,包括功率輸入、驅動信號輸入、調諧輸入、檢測信號輸出和角速度輸入。電源采用線性電源,提供±5V直流電壓,并將等效角速度輸入端連接到信號發生器。調諧輸入根據所需的輸入直流電壓進行調諧。
連接完成后,進行系統測試,其測試結果將在下一章中進行展示。
3 MEMS陀螺HILS模型測試
3.1 頻率特性模擬
通過改變電感和電容的值,HILS模型電路可以模擬不同諧振頻率的兩種模式。該HILS模型電路的幅頻和相頻及特性如圖17所示。在引入正弦驅動信號的情況下,x模態可讀出檢測信號,其諧振頻率在79625Hz;y模態在引入相同驅動信號的情況下,可讀出檢測信號,其諧振頻率在84543Hz。兩模態相位信號變化均符合二階系統預期響應,相位改變-180°。從實驗結果可以看出,兩種模式都可以在預期的諧振頻率下振蕩,兩種模式的諧振頻率存在一定的差異。
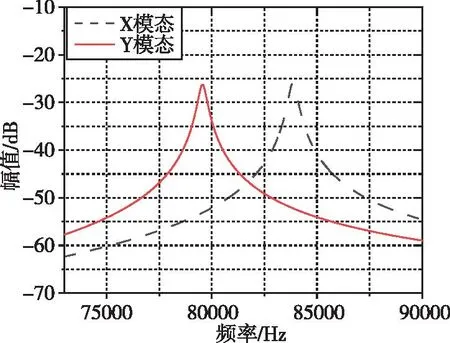
(a) 幅頻特性
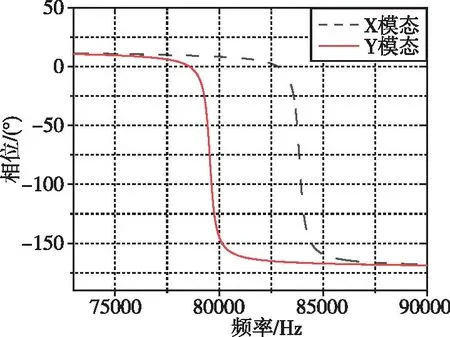
(b)相頻特性圖17 頻率特性Fig.17 Frequency characteristics
3.2 模態匹配和Q值調節模擬
在該HILS模型電路中引入調諧電壓,對其中一個模態諧振頻率進行微調,使該模態的諧振頻率與另一種模態重合或分裂,從而完成諧振頻率調整。實驗結果如圖18所示,從實驗結果可以看出,在單模態引入+5V調諧電壓之后,諧振頻率點向右移動,其諧振頻率從79625Hz轉移到了84532Hz,接近于另一模態諧振頻率,因此,該HILS系統模型可通過引入調諧電壓實現模態匹配,滿足電壓調諧的要求。
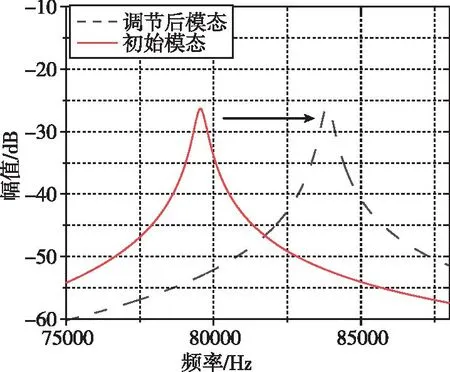
圖18 模態調諧示意圖Fig.18 Schematic diagram of modal tuning
為了模擬不同Q值的陀螺,在HILS系統等效電路中增加了Q值調整功能,不同Q值電路的幅頻特性如圖19所示,Q值越高,響應幅值越高,在HILS系統電路中,通過改變可變電阻的阻值實現了單模態諧振幅值從-40dB到-32dB的提升,實現了調整Q值功能。從實驗結果可以看出,該系統可以在不改變諧振頻率的情況下實現Q值的調整,可以滿足不同Q值的陀螺的仿真。
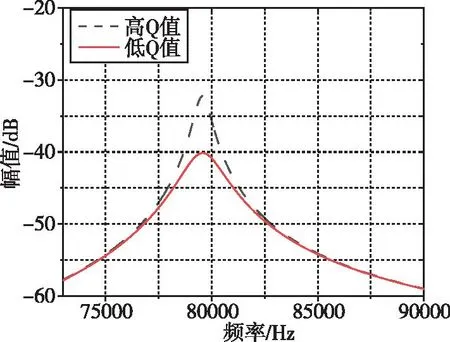
圖19 Q值調節幅頻特性Fig.19 Q value adjustment amplitude-frequency characteristics
3.3 等效角速度測試
為了模擬有角速度輸入時陀螺的工作狀態,本文所設計的MEMS陀螺的HILS系統中增加了等效科里奧利力輸入部分。在激勵相同但角速度輸入不同情況下的檢測模態幅值如圖20(a)和圖20(b)所示。從實驗結果可以看出,如圖20(a)所示,在引入20(°)/s的角速度時,驅動模態和檢測模態的諧振峰值分別在11dB和-30dB;如圖20(b)所示,在引入10(°)/s的角速度時,驅動模態和檢測模態的諧振峰值均發生改變,其值分別在5dB和-55dB,因此該等效電路可以模擬不同角速度下陀螺的輸入功能。
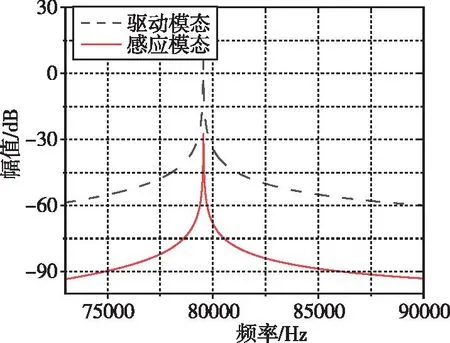
(a) 大角速度輸入幅頻特性
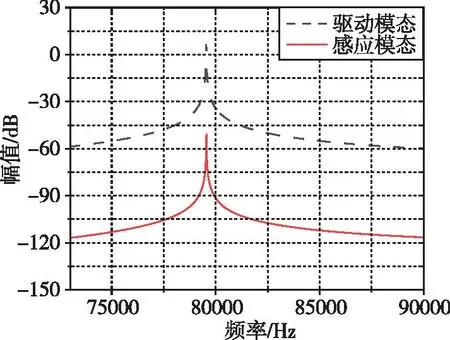
(b) 小角速度輸入幅頻特性圖20 等效角速度輸入測試Fig.20 Equivalent angular rate input test
3.4 角速度輸入測試
角速度輸入測試方法為通過鎖相放大器的鎖相環使驅動模態一直工作在諧振頻率處,通過檢測模態輸出幅值來判斷角速度輸入大小。不引入角速度時的檢測模態幅值如圖21(a)所示,該等效電路的底噪幅值約為2.73mV,其中橫坐標代表時間,縱坐標代表電壓。引入等效正弦角速度時檢測模態幅值如圖21(b)所示,檢測模態的信號也為正弦信號,其幅值可達47mV,該HILS仿真模型具有良好的信噪比。
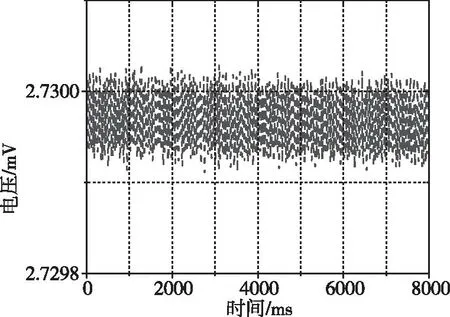
(a) 無角速度輸入時檢測模態輸出
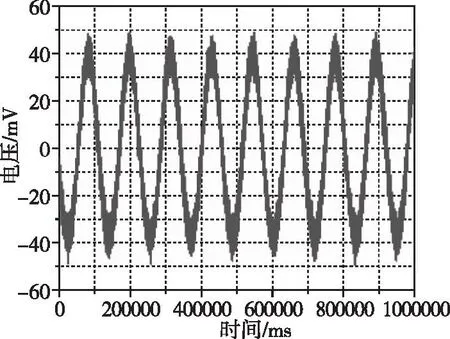
(b) 輸入正弦角速度時檢測模態輸出圖21 角速度輸入測試Fig.21 Angular rate input test
由實驗結果圖分析可知,檢測模態的輸出也為正弦信號,即等效電路可以實現旋轉信號輸入與檢測功能,可以根據輸入外部角速度時的狀況進行仿真。
從本節的實驗結果可以證實,本文設計的HILS系統可以完成MEMS陀螺內部運行機理的仿真,可以調整參數,并代替MEMS陀螺測試陀螺的前端模擬電路和數字系統。
4 總結與展望
本文開發了MEMS陀螺的HILS系統,并完成了該系統的實驗驗證。HILS模型可以為陀螺接口電路的設計提供實驗平臺,縮短開發過程。同時,也為MEMS陀螺的內部機理研究提供了一個研究平臺。未來,可基于HILS系統平臺,對MEMS陀螺的不同調制方式進行更多的研究,MEMS陀螺的接口電路的設計和驗證也可以依托HILS系統進行,用以驗證所設計的接口電路的可靠性和普適性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
核科學與工程(2015年4期)2015-09-26 11:59:03
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
