基于激光雷達技術的路面平整度算法
2023-03-22 09:28:42朱立偉冷志鵬李宏偉
物聯網技術 2023年3期
關鍵詞:深度
朱立偉,冷志鵬,李宏偉
(浙江杉工智能科技有限公司,浙江 寧波 315000)
0 引 言
近年來,隨著社會經濟的不斷發展,我國的公路交通網絡也在不斷完善。截至2020年底,全國公路總里程已達到519.8萬公里,公路密度已達到每百平方公里54.15公里。在對路面進行運營養護時,必須先對路面狀況進行客觀、量化的評估。路面平整度是路面評價及路面運營養護中的一個重要指標,反映的是路面縱斷面剖面曲線的平整性。不平整的路面會增大行車阻力,并使車輛產生附加的振動作用,影響行車的速度和安全、駕駛的平穩性和乘客的舒適度。同時,振動作用還會對路面施加沖擊力,從而加快路面損壞,影響路面的使用壽命[1]。
路面平整度的設備檢測方法主要有兩大類:縱斷面測定法和響應式檢測法[2]。縱斷面測定法直接測出路面縱斷面剖面曲線,然后對測出的縱斷面曲線進行數學分析得出平整度指標。常用設備包括三米直尺、平整度儀等。這類檢測方法由于采樣較少,很難客觀評價路面整體的平整度,還存在受人為因素影響大、精度低、效率低等缺點[3,4]。響應式檢測法通過測出車輛對路面縱斷面變化的力學響應,對其進行數學分析得出平整度指標。這類方法檢測速度快,但精度較低,難以滿足高質量公路日趨增長的檢測需求[5,6]。因此,對公路平整度檢測設備和方法的研究愈發重要,各國相關行業的研究人員都致力于其中[7],公路網發達的國家已研制出能夠直接獲得可靠檢測數據的檢測儀器[8]。
激光雷達技術作為一種新型空間數據獲取技術發展迅速,其測量精度和處理效率得到快速提升,被廣泛應用于各種領域[9]。通過車載激光雷達采集路面深度信息作為數據源對路面進行平整度計算已具有技術可行性,通過這一技術可實現公路養護管理的智能化,能夠有效降低成本[10]。
1 算法框架
本算法主要由數據采集模塊、數據處理模塊、平整度計算分析模塊和路面狀況評估模塊組成,算法框架如圖1所示。
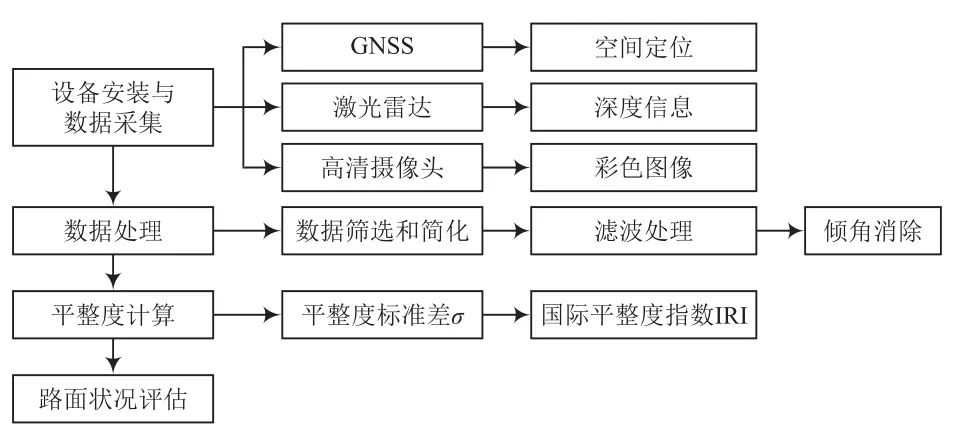
圖1 算法框架
(1)設備安裝與數據采集:主要設備包括GNSS、激光雷達、高清攝像頭等。GNSS對監測位置進行定位,激光雷達采集深度信息用于計算路面平整度,高清攝像頭采集路面圖片為后續養護工作提供支持。
(2)數據處理:主要包括數據篩選及簡化、濾波處理、傾角消除等步驟。在兼顧準確度和處理效率的前提下,對設備采集到的數據進行預處理,并保留有效的、調整過的深度數據以進行后續計算。
(3)平整度計算:主要包括平整度標準差σ、國際平整度指標IRI計算。參考連續式平整度儀的測量原理,處理深度信息后,獲得路面高程信息,計算平整度標準差σ;再根據路面實際狀況的σ與IRI的經驗關系,將平整度標準差σ換算為國際平整度指標IRI。
(4)路面狀況評估:根據平整度計算結果對路面的狀況進行評估。
2 數據采集
數據采集設備的搭載工具為小轎車,主要采集設備包括GNSS、激光雷達、高清攝像頭等。其中激光雷達是路面深度信息采集的核心設備,其測量原理是利用激光測距來獲取物體表面的三維坐標信息,即向測量目標發射激光,通過接收激光接觸物體后反射回來的信號獲取激光雷達到目標的距離。
由于本算法對深度信息要求較高,同時綜合考慮經濟性與便捷性,最終選用了Intel Realsense L515激光雷達作為本算法的主要數據采集設備。Intel Realsense L515是一款革命性的固態LiDAR深度相機,它兼具深度信息采集和彩色圖像拍攝功能,采用了專有的MEMS鏡面掃描技術;與其他飛行時間技術相比,激光功率和效率更高。相機實物如圖2所示。

圖2 Intel Realsense L515深度相機
激光雷達工作時,使其以垂直于路面的姿態掃描路面,可以獲得拍攝處的RGB彩色圖像和深度信息及其對應的深度圖像。深度信息是采集設備到場景中各采集點的距離及采集點的平面坐標。深度圖像是深度信息在圖像上的具體表現,是以各采集點的深度值為像素值得到的圖像[11]。理想情況下,深度圖像的正中心為坐標原點,是攝像頭到路面的垂直投影位置;豎直方向為y軸,是車輛的行進方向(即路面平整度測量的方向),向上為正,向下為負;水平方向為x軸,是路面橫斷面方向,向右為正,向左為負;垂直圖像方向為z軸,是攝像機俯拍路面方向,垂直路面向外為正。采集得到的RGB彩色圖像和深度圖像示例如圖3所示。
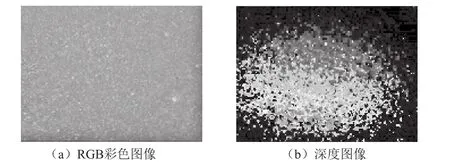
圖3 采集到的RGB彩色圖像和深度圖像
激光雷達能夠采集得到豐富的三維點云數據,但點云數據的質量受采集設備性能、采集時設備的平穩程度、光照等因素的影響,因此激光雷達的工作質量直接影響采集到數據的準確度,影響路面平整度計算的精度。
3 數據分析與處理
3.1 數據篩選與簡化
(1)計算區域選擇
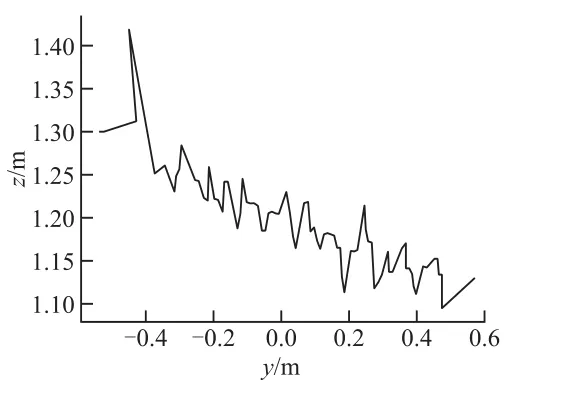
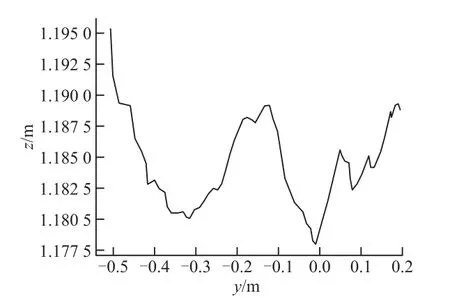
對路面平整度進行分析計算時,主要考察的是沿汽車行駛方向上的圖像中心區域的路面平整度。因此可以簡化計算,選擇指定區域作為此張照片處路面平整度的計算區域,計算區域內的點云數據為計算路面平整度的參數對象。平整度計算區域以圖像中心為標準,選擇沿汽車行駛方向上與圖像中心水平距離小于0.1 m,即-0.1 m 圖4 平整度計算區域示意圖 (2)三維點云數據降維 路面平整度的計算主要是為了量化沿道路方向上的路面起伏變化,因此可以將計算區域上的三維點云數據簡化為深度z對應沿道路中心線方向y坐標變化的二維數據。由于對應計算區域上的同一個y值,可能存在一個深度點,也可能存在多個深度點,所以在轉化為二維數據時,需要對存在多個深度點的y坐標位置進行等效處理,即將此處多個點的深度信息等效為多個點深度值的平均值。處理后即可得到計算區域內,路面深度z沿道路中心線方向坐標y的一一對應的變化曲線,如圖5所示。 圖5 路面深度變化曲線 由于激光雷達測量受到了高頻噪聲的影響,結果具有一定的不穩定性,所以采集到的數據有一定波動,需要對其進行濾波處理,以盡可能減小其對計算的影響。 本文采用加權滑動窗口濾波算法對深度數據進行預處理。本方法是對一個滑動窗口內的所有深度值進行重計算,用窗口內不同位置的深度值加權計算得到一個新的深度值,代替窗口中心點的深度值的一種線性平滑法。滑動窗口加權濾波算法原理簡單、計算時間短,能在有效減小數據處理時深度值波動對結果的干擾的同時,較好地保留路面的起伏情況。 采用不同的滑動窗口大小對數據進行滑動窗口加權濾波處理時,若滑動窗口過小,則處理效果欠佳;若滑動窗口過大,則曲線過于平緩,無法反映路面起伏的細節變化,路面平整度計算的誤差較大。因此,在對深度變化曲線進行滑動窗口濾波處理時,根據特定的設備、拍攝距離等,選擇合適的窗口大小尤為重要。加權計算時,計算點深度值的權重隨著離窗口中心距離的增大而逐漸減小,以放大離窗口距離近的計算點的測得深度值對濾波結果的影響。現分別采用滑動窗口大小為2、權重系數為[1,1],滑動窗口大小為3、權重系數為[1,2,1],滑動窗口大小為5、權重系數為[1,2,3,2,1],滑動窗口大小為 10、權重系數為 [1,2,3,4,5,5,4,3,2,1],滑動窗口大小為15、權重系數為[1,2,3,4,5,6,7,8,7,6,5,4,3,2,1],滑動窗口大小為20、權重系數為[1,2,3,4,5,6,7,8,9,10,10,9,8,7,6,5,4,3,2,1]對深度變化曲線進行滑動窗口濾波處理,結果如圖6所示。 圖6 不同滑動窗口大小處理后的深度變化曲線 由結果可知,在本文所使用的數據采集設備和拍攝環境下,選擇大小為15的窗口進行滑動窗口加權濾波處理,效果較好,同時也能較好地保留路面起伏的細節變化。 傾角消除是指消除由于攝像頭懸掛位置不垂直于地面或汽車行進過程中的顛簸等原因造成的傾角。 由于攝像頭懸掛時位置不正、路面存在坡度、汽車行駛時上下顛簸等原因,雷達掃描路面時往往不是完全垂直于路面,而是存在一定的傾角。因此,得到的路面深度變化曲線往往不是水平的,需要預先對其進行矯正,以減小路面平整度計算時的難度,增加結果的準確度。 由于路面對象的特殊性,深度變化曲線總趨勢一般為直線,因此可以通過深度變化曲線擬合一階直線的方式來確定傾斜,再通過二維旋轉公式,將傾斜的深度變化曲線矯正到水平,如圖7所示。由圖7可知,傾角消除效果較好,深度變化曲線主體走向基本為水平方向,深度變化曲線極值點大小基本在幾厘米范圍內波動。 圖7 消除傾角后的深度變化曲線 可參考連續平整度儀的測量方法對激光雷達采集并處理后的數據進行平整度計算。連續式平整度儀是通過數據采集設備直接采集路面相對于動態基準的縱向高差數據,再進行計算分析,得到標準差σ(又稱均方差)對路面平整度進行表征[12]。計算平整度標準差σ的具體步驟如下: (1)以激光雷達采集到的單張路面深度圖像(長度一般為0.5~1 m)為對象,按前文的方法進行數據分析與處理,可以得到車輛行進方向上、圖像中心附近位置處的點云y-z軸深度變化曲線。 (2)讀取每個點的深度值z1,z2,z3, ...,zn,并計算所有點的平均深度zm。 (3)通過下式計算路面的平整度標準差σ。 經過統計計算,深度變化曲線極大值點最大為1.195 m,極小值點最小為1.780 m,平整度標準差σ約為3.5 mm。 已知平整度標準差σ,可以通過經驗公式σ=a×IRI+b計算得到國際平整度指標IRI[13]。由路面實際狀況確定的σ與IRI的經驗關系如下: 經過計算,此處路面的國際平整度指標IRI為5.88。與3 m直尺法人工測量的結果相比,理論誤差在10%以內。 本文提出了一種先進的路面平整度評價方法,通過激光雷達技術實現路面平整度快速分析計算,為路面養護提供了一種新思路,可大大降低傳統檢測方式在人員方面的投入,降低檢測成本。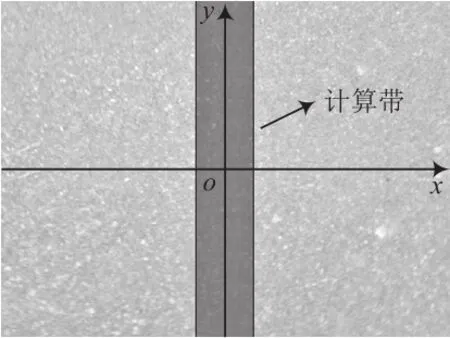
3.2 濾波處理

3.3 傾角消除
4 路面平整度計算算法和國際平整度指數換算
4.1 計算平整度標準差
4.2 計算IRI
5 結 語
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57