行人與自動駕駛汽車的交互研究
2023-03-22 07:39:00張澤宇王天博
中國機(jī)械工程 2023年5期
呂 偉 郭 伏 劉 莉 張澤宇 王天博
1.東北大學(xué)工商管理學(xué)院,沈陽,110169 2.沈陽航空航天大學(xué)經(jīng)濟(jì)與管理學(xué)院,沈陽,110136
0 引言
在道路交通系統(tǒng)中,行人是各類道路使用者中最脆弱、承受安全風(fēng)險(xiǎn)最高的一類。世界衛(wèi)生組織(world health organization,WHO)發(fā)布的《2018年全球道路安全現(xiàn)狀報(bào)告》顯示,全球每年約有135萬人死于道路交通事故,其中行人占比約為22%,在部分國家甚至高達(dá)65%[1]。WHO通過調(diào)查指出,行人受傷或死亡的誘因主要來自如下三個(gè)方面:駕駛?cè)艘蛩?如超速、飲酒、疲勞、分心駕駛等),行人因素(如分心或感知/行動能力受限等),道路交通因素(如缺乏行人安全設(shè)施以及交通法規(guī)約束等)。自動駕駛汽車(automated vehicles, AVs)作為一門近年來新興的技術(shù),能夠通過環(huán)境感知、高精地圖與人工智能等技術(shù)實(shí)現(xiàn)自主決策與自動控制,有望在降低交通事故發(fā)生、減少能源消耗、提高交通效率、改善行動能力受限人士出行等方面發(fā)揮巨大作用[2]。根據(jù)國際汽車工程師協(xié)會(SAE)對駕駛自動化的分級標(biāo)準(zhǔn),L3級以上自動駕駛汽車將不需要駕駛?cè)藢?shí)時(shí)監(jiān)控道路環(huán)境或執(zhí)行動態(tài)駕駛?cè)蝿?wù)[3],因此能夠避免來自駕駛?cè)说娘L(fēng)險(xiǎn)因素,從而改善行人及其他脆弱道路使用者的風(fēng)險(xiǎn)暴露水平。自動駕駛汽車實(shí)現(xiàn)規(guī)模化、商業(yè)化應(yīng)用的前提之一是能夠與其他道路使用者進(jìn)行安全、準(zhǔn)確、高效的交互,其中,由于行人行為的不確定性以及個(gè)體間的差異性,實(shí)現(xiàn)行人與自動駕駛汽車的良好交互被廣泛認(rèn)為是一項(xiàng)重大挑戰(zhàn)[4]。
MARKKULA等[5]將道路交通系統(tǒng)中的交互定義為:至少兩方道路使用者因意圖在同一時(shí)間使用同一道路空間而使雙方行為受到影響的情境。根據(jù)該定義,行人與汽車的交互主要表現(xiàn)為行人穿越機(jī)動車道時(shí)與來車(駕駛?cè)?間相互感知、溝通以及作出決策與行為的過程。已有的關(guān)于行人與傳統(tǒng)汽車交互的研究指出,行人的過街決策與行為主要受到汽車隱式特征的影響(如汽車速度、人車間距、汽車到達(dá)時(shí)間(time to arrival,TTA)等)[6]。同時(shí),顯式信息也廣泛存在于行人與汽車的交互過程中并產(chǎn)生影響,包括汽車的聲光信號,行人的肢體語言以及與駕駛?cè)说氖謩莼印⒛抗饨佑|等[6]。此外,行人與汽車的交互過程也受到環(huán)境因素(如交通信號、行人安全設(shè)施、道路幾何特征等)等外部因素的支配影響[4]。行人通過對來車的運(yùn)行狀態(tài)、駕駛?cè)藗鬟f的信息以及環(huán)境信息進(jìn)行整合,作出相應(yīng)的決策并在執(zhí)行過程中進(jìn)行動態(tài)調(diào)整。考慮到自動駕駛汽車與傳統(tǒng)汽車在隱式特征與顯式特征方面的潛在差異,當(dāng)前已有學(xué)者就行人與自動駕駛汽車在部分簡單交通場景中的交互行為開展了探索性研究。
與傳統(tǒng)汽車相比,自動駕駛汽車由于駕駛?cè)说娜笔Щ蛉蝿?wù)轉(zhuǎn)變,將喪失一部分由駕駛?cè)藗鬟f出的顯式信息,行人的決策將更加依賴于對自動駕駛汽車隱式特征的預(yù)估和對環(huán)境要素的感知,這將會對人車交互的效率與安全造成負(fù)面影響。一方面,此前的研究結(jié)果表明行人在感知汽車的速度與距離等隱式線索時(shí)往往存在偏差,尤其是在汽車距離較遠(yuǎn)時(shí)[7]。同時(shí),自動駕駛汽車與傳統(tǒng)汽車可能在運(yùn)動學(xué)特性方面(如讓行行為與制動模式)存在差異,行人在與之交互的過程中可能與既定的期望、習(xí)慣或行為相沖突,這將進(jìn)一步影響交互的效率和效果。因此,需要對自動駕駛汽車隱式線索對人車交互過程的影響開展進(jìn)一步研究。另一方面,學(xué)者借助外部人機(jī)界面(external human-machine interface, eHMI)將自動駕駛汽車的駕駛模式、運(yùn)行狀態(tài)或預(yù)期行為等信息展示在汽車外部[8],輔助其他道路使用者感知自動駕駛汽車的狀態(tài)或意圖。目前,學(xué)者針對自動駕駛汽車eHMI的含義、形式、顏色與位置等內(nèi)容開展了探索性研究,并在部分維度形成了初步共識。例如,在eHMI的表征含義方面,自動駕駛汽車的意圖信息對其他道路使用者最為重要[9];在eHMI色彩設(shè)計(jì)方面,青色被認(rèn)為具有良好的可見性、區(qū)分度以及與現(xiàn)行道路交通信號系統(tǒng)的兼容性[10]。但在eHMI的設(shè)計(jì)形式上,目前仍未形成一致的結(jié)論,仍需要進(jìn)一步探索不同eHMI設(shè)計(jì)的可用性。
目前,由于實(shí)際道路環(huán)境中缺乏真正的自動駕駛汽車,部分學(xué)者基于虛擬現(xiàn)實(shí)(virtual reality,VR)或幕后模擬法對行人與自動駕駛汽車在簡單道路場景(如單行道、停車場)中的交互行為進(jìn)行了研究[11],在復(fù)雜環(huán)境場景中(如交叉路口和特殊交通狀況等)行人與自動駕駛汽車的交互研究仍然相對缺乏。這導(dǎo)致自動駕駛汽車隱式與顯式特征設(shè)計(jì)在復(fù)雜環(huán)境中的可用性及其對人車交互行為的影響仍不明確,并在一定程度上限制了自動駕駛汽車的商業(yè)化與規(guī)模化應(yīng)用。
綜上,為進(jìn)一步完善現(xiàn)有研究的不足,本文借助虛擬現(xiàn)實(shí)和動作捕捉系統(tǒng)開發(fā)行人與自動駕駛汽車交互實(shí)驗(yàn),探索自動駕駛汽車隱式特征(讓行行為)與顯式特征(有無外部人機(jī)界面)在不同道路環(huán)境中(有無行人安全設(shè)施、汽車不同駛近方向)對人車交互過程以及行人過街行為的影響。此外,本研究將生存分析方法(Kaplan-Meier分析和Cox回歸)應(yīng)用于行人與自動駕駛汽車的交互研究中,兼顧行人的過街結(jié)果狀態(tài)與決策時(shí)間。
1 研究方法
1.1 實(shí)驗(yàn)材料
考慮到當(dāng)前自動駕駛汽車的可獲得性與安全性以及虛擬現(xiàn)實(shí)平臺的沉浸感、安全性、可控性與經(jīng)濟(jì)性,本研究基于洞穴式自動虛擬環(huán)境(cave automatic virtual environment,CAVE)搭建了虛擬交互環(huán)境。該CAVE系統(tǒng)通過四面投影屏幕搭建一個(gè)具有高度沉浸感的三維立體虛擬仿真環(huán)境(長×寬×高:9 m×4 m×2.5 m),并借助VR交互設(shè)備(包括動作捕捉、位置跟蹤、數(shù)據(jù)手套和力學(xué)反饋)使參與者獲得較為真實(shí)的三維交互式體驗(yàn),如圖1a所示。在實(shí)驗(yàn)過程中,行人在虛擬的道路空間中與駛來的自動駕駛汽車進(jìn)行交互;同時(shí),基于光學(xué)傳感的動作捕捉與定位系統(tǒng)能夠?qū)⑿腥诉\(yùn)動學(xué)數(shù)據(jù)(位置、速度、高度等信息)傳入虛擬交互場景中,輔助基于Unity 3D開發(fā)的自動駕駛汽車感知行人位置、完成交互過程,實(shí)驗(yàn)場景如圖1b所示。

(a)洞穴式自動虛擬環(huán)境
1.2 實(shí)驗(yàn)被試
為實(shí)現(xiàn)行人與自動駕駛汽車在虛擬現(xiàn)實(shí)環(huán)境中的交互,本次實(shí)驗(yàn)共面向社會招募了38名被試(其中18名男性,20名女性),被試的平均年齡為33.82±10.30(均值±標(biāo)準(zhǔn)差)歲。所有被試均自述身體健康、無行走障礙,裸眼視力或矯正視力正常。實(shí)驗(yàn)持續(xù)時(shí)長約為40 min,所有被試均對實(shí)驗(yàn)內(nèi)容與流程知情同意、自愿參加,并在實(shí)驗(yàn)結(jié)束后獲取一定現(xiàn)金報(bào)酬。
1.3 實(shí)驗(yàn)設(shè)計(jì)
為探索自動駕駛汽車隱式與顯式線索在不同環(huán)境中對人車交互行為的影響,本研究在整體上采用組內(nèi)三因素(2×2×2)重復(fù)測量設(shè)計(jì),三個(gè)自變量分別為自動駕駛汽車的讓行行為(讓行/不讓行,yielding/no-yielding,Y/NY)、有無行人安全設(shè)施(有/無斑馬線,zebra/no-zebra,Z/NZ)以及自動駕駛汽車的駛近方向(對向/右側(cè),oncoming/right direction,OD/RD)。每名被試在各因素水平組合下完成6次過街任務(wù),總計(jì)6×8=48次。此外,為進(jìn)一步調(diào)查eHMI在行人與自動駕駛汽車交互過程中的提示效應(yīng),對自動駕駛汽車在讓行條件下eHMI呈現(xiàn)與否進(jìn)行了操控,即讓行條件下的所有試次中,50%試次不呈現(xiàn)eHMI,另外50%采用青色、光帶式eHMI傳達(dá)汽車的減速讓行意圖(圖1b),其他條件下均不呈現(xiàn)eHMI。結(jié)合已有研究中關(guān)于eHMI設(shè)計(jì)形成的初步共識以及LEE等[12]與KALEEFATHULLAH等[13]研究中的eHMI設(shè)計(jì)方案,本研究設(shè)計(jì)了位于汽車擋風(fēng)玻璃邊沿的青色、閃爍、光帶式eHMI,用以傳達(dá)自動駕駛汽車的讓行意圖。
在實(shí)驗(yàn)場景的選擇與設(shè)置上,本文主要考慮了傳統(tǒng)道路交通中交通事故的多發(fā)場景[14]以及自動駕駛背景下相關(guān)研究中使用的人車交互場景[6],實(shí)驗(yàn)場景設(shè)定為行人在無信號燈控制的十字路口等待過街,如圖1b中黃色“×”所示。此時(shí),一輛自動駕駛汽車從行人所在位置的右側(cè)或?qū)ο蛞?0 km/h的速度駛近。由于該路口缺乏信號燈、指示牌等標(biāo)識,自動駕駛汽車預(yù)設(shè)的行為模式包括讓行和不讓行。本實(shí)驗(yàn)中,自動駕駛汽車在“看見”行人但對其過街意向不明確的情況下將采取減速行駛的策略,自動駕駛汽車在3 s內(nèi)以恒定的加速度(-4 m/s2)減速至速度為0。汽車在讓行或不讓行條件下的速度曲線見圖2(其中汽車的速度與加速度設(shè)置參考了已有研究中的相關(guān)參數(shù)設(shè)置[6,15])。
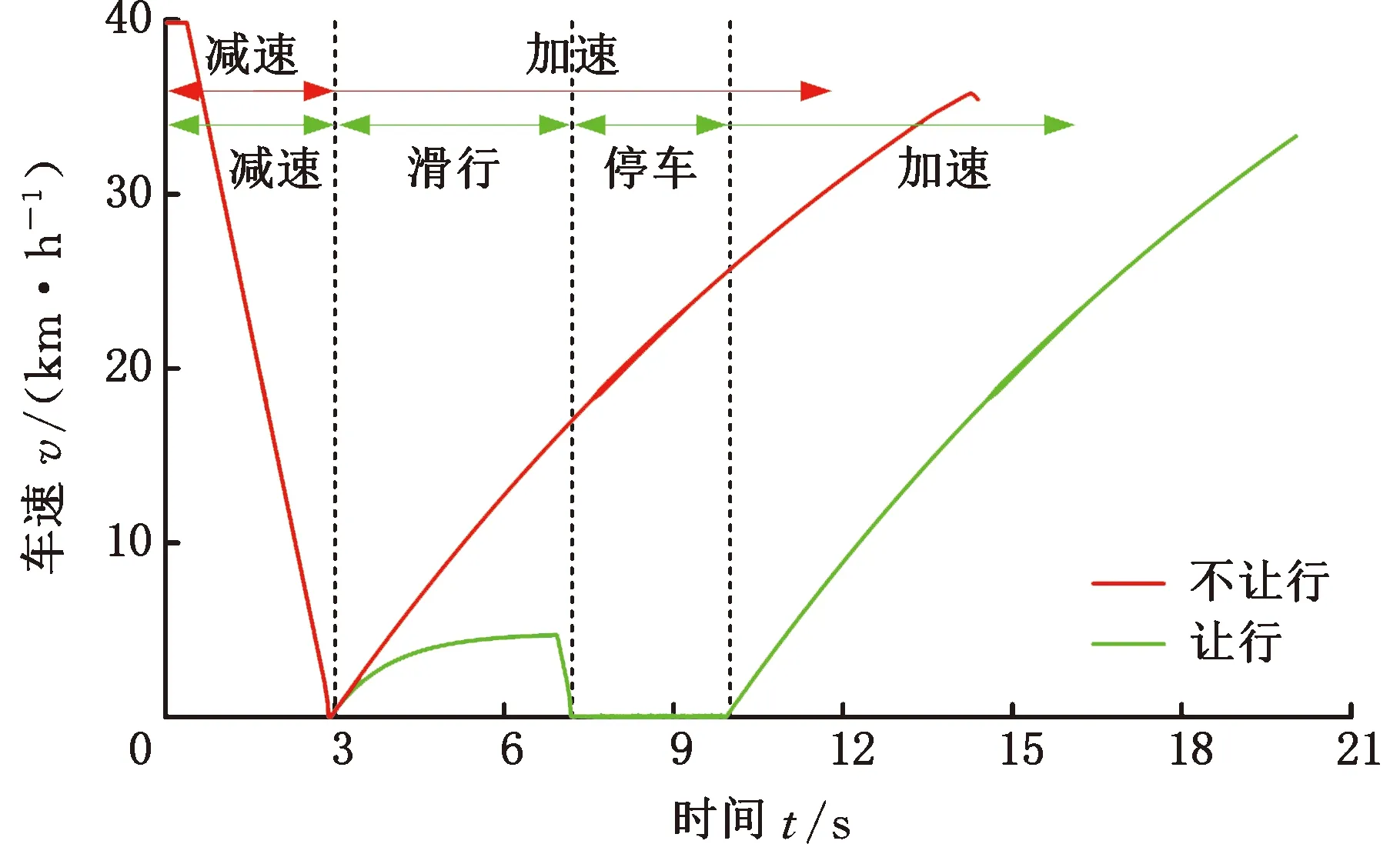
圖2 自動駕駛汽車讓行/不讓行條件下的速度模式Fig.2 Speed pattern of AV for yielding/no-yielding condition
此后,如果該試次預(yù)設(shè)為自動駕駛汽車不讓行,那么自動駕駛汽車將迅速加速駛離行人所在位置(但如果行人在汽車加速駛離過程中開始過街,則汽車將會停車讓行,避免與行人發(fā)生碰撞)。如果該試次預(yù)設(shè)為自動駕駛汽車為行人讓行,則汽車將會在速度降至0后繼續(xù)以低于5 km/h的速度繼續(xù)向前“滑行”4 s后完全制動(基于實(shí)際交通中對駕駛?cè)诵袨榈挠^察與模仿),隨后完全停車(持續(xù)時(shí)長為3 s)等待行人過街。如果行人在汽車“滑行”或停車期間過街,汽車則會在行人過街后加速駛離行人的初始位置;如果行人在汽車“滑行”或停車期間未開始過街,汽車在完全停車3 s后將加速駛離行人所在位置(即行人未呈現(xiàn)出過街意圖或行為)。此外,如果某個(gè)讓行試次預(yù)設(shè)為自動駕駛汽車顯示eHMI,那么eHMI將在自動駕駛汽車進(jìn)入“滑行”階段時(shí)(即第3 s時(shí))開始呈現(xiàn)。
在與自動駕駛汽車交互的過程中,行人在其認(rèn)為安全時(shí)即可開始過街,實(shí)驗(yàn)平臺將記錄從汽車出現(xiàn)到行人開始過街時(shí)刻的時(shí)間間隔(即為過街決策時(shí)間或過街等待時(shí)間)以及行人在自動駕駛汽車前或后過街(即為過街結(jié)果狀態(tài))。此外,在實(shí)驗(yàn)結(jié)束后,行人被要求及時(shí)完成關(guān)于實(shí)驗(yàn)內(nèi)容與體驗(yàn)的電子問卷與在線訪談。
1.4 實(shí)驗(yàn)數(shù)據(jù)分析方法
本研究將生存分析方法中的Kaplan-Meier分析和Cox比例風(fēng)險(xiǎn)模型應(yīng)用于行人與自動駕駛汽車的交互行為分析中。生存分析起源于醫(yī)學(xué)領(lǐng)域,旨在研究終點(diǎn)事件和生存時(shí)間及其影響因素間的關(guān)系及程度大小,其中終點(diǎn)事件是指某一事件的結(jié)果,生存時(shí)間是指該事件從起點(diǎn)到終點(diǎn)的時(shí)間跨度[16]。生存時(shí)間數(shù)據(jù)主要有兩類:①完全數(shù)據(jù)(complete data)(觀察對象在觀察窗口內(nèi)發(fā)生終點(diǎn)事件,即時(shí)間信息是完整的);②刪失數(shù)據(jù)(censored data)(未觀察到研究對象發(fā)生終點(diǎn)事件,即時(shí)間信息是不完整的)。生存分析方法能同時(shí)兼顧事件結(jié)局狀態(tài)與時(shí)間跨度,并能有效應(yīng)對事件數(shù)據(jù)不完整或時(shí)間分布不明確等實(shí)證或?qū)嶒?yàn)研究常見問題。近年來,已有部分學(xué)者將生存分析理論與方法應(yīng)用于交通領(lǐng)域內(nèi),研究交通擁堵時(shí)間、事故持續(xù)時(shí)間、行人過街等待時(shí)間及其影響因素相關(guān)問題[17-18]。
本次實(shí)驗(yàn)中,行人在與自動駕駛汽車交互的過程中,通過對道路環(huán)境信息與汽車運(yùn)行狀態(tài)的綜合判斷作出在汽車到達(dá)前或駛離后過街的決策,兩種決策的結(jié)果狀態(tài)及決策歷經(jīng)的時(shí)間均被平臺自動記錄。與其他研究行人過街或闖紅燈的研究類似,本研究重點(diǎn)關(guān)注行人從汽車前過街的決策與行為。一方面,在實(shí)際道路交通系統(tǒng)中,行人在車前過街是具有時(shí)間壓力以及動態(tài)風(fēng)險(xiǎn)的交互過程,同時(shí)對來車的運(yùn)行狀態(tài)產(chǎn)生潛在影響。另一方面,在本實(shí)驗(yàn)中,行人如果在車前過街,則存在可知的決策時(shí)間(即從自動駕駛汽車出現(xiàn)到行人發(fā)起過街時(shí)刻的時(shí)間間隔);若行人在汽車駛離后發(fā)起過街或未過街,則由于缺乏時(shí)間或任務(wù)壓力,無法確定行人在汽車駛離后的決策時(shí)間。結(jié)合生存分析的理論,在行人與自動駕駛汽車交互過程中,行人從車前過街時(shí),決策時(shí)間(生存時(shí)間)為完全數(shù)據(jù);反之,當(dāng)行人從車后過街時(shí),決策時(shí)間為刪失數(shù)據(jù)。本文將借助生存函數(shù)曲線以及Cox模型對行人過街決策時(shí)間與結(jié)果狀態(tài)進(jìn)行分析與論述。
2 行人與自動駕駛汽車的交互分析
2.1 描述性分析
實(shí)驗(yàn)結(jié)束后,通過問卷的形式調(diào)查了影響行人過街決策的因素及重要性。結(jié)果表明,約有92%的被試認(rèn)為汽車的速度對其過街決策的影響最大,其次為與汽車的距離(84%)以及有無斑馬線設(shè)施(63%),最后是eHMI(39%)。進(jìn)一步的訪談表明,共有37名被試在實(shí)驗(yàn)過程中注意到了eHMI的存在,18名被試指出eHMI對他們的過街決策產(chǎn)生了影響,其中12名被試對eHMI的含義作出了正確的解釋。
本研究中38名被試共計(jì)進(jìn)行了38×48=1824次過街實(shí)驗(yàn),剔除由于技術(shù)原因?qū)е碌膶?shí)驗(yàn)數(shù)據(jù)采集失敗試次52次,共獲得有效實(shí)驗(yàn)試次1772次,各條件下的行人過街頻數(shù)與決策時(shí)間如表1所示。從表1中可以看出,在自動駕駛汽車不讓行的情況下,沒有斑馬線時(shí),僅有13.74%的行人選擇從正在駛近的自動駕駛汽車前過街,平均決策時(shí)間為2.27 s;這一比例在有斑馬線設(shè)施時(shí)上升至37.10%,平均決策時(shí)間則縮短為1.79 s。而在自動駕駛主動停車讓行的情況下,沒有斑馬線時(shí),約有70.50%的行人從車前過街,平均決策時(shí)間為6.81 s;當(dāng)?shù)缆飞嫌邪唏R線時(shí),該比例上升至84.84%,決策時(shí)間縮短至4.88 s。這表明在僅考慮行人過街決策結(jié)果狀態(tài)(即從車前過還是從車后過街)時(shí),行人的過街決策與行為主要受到汽車運(yùn)行狀態(tài)(例如本研究中的汽車讓行行為)的影響,但行人安全設(shè)施的存在能夠進(jìn)一步明確沖突道路空間中道路的使用優(yōu)先權(quán),從而提高行人在汽車前過街的感知安全與過街比例,同時(shí)縮短其過街決策時(shí)間。
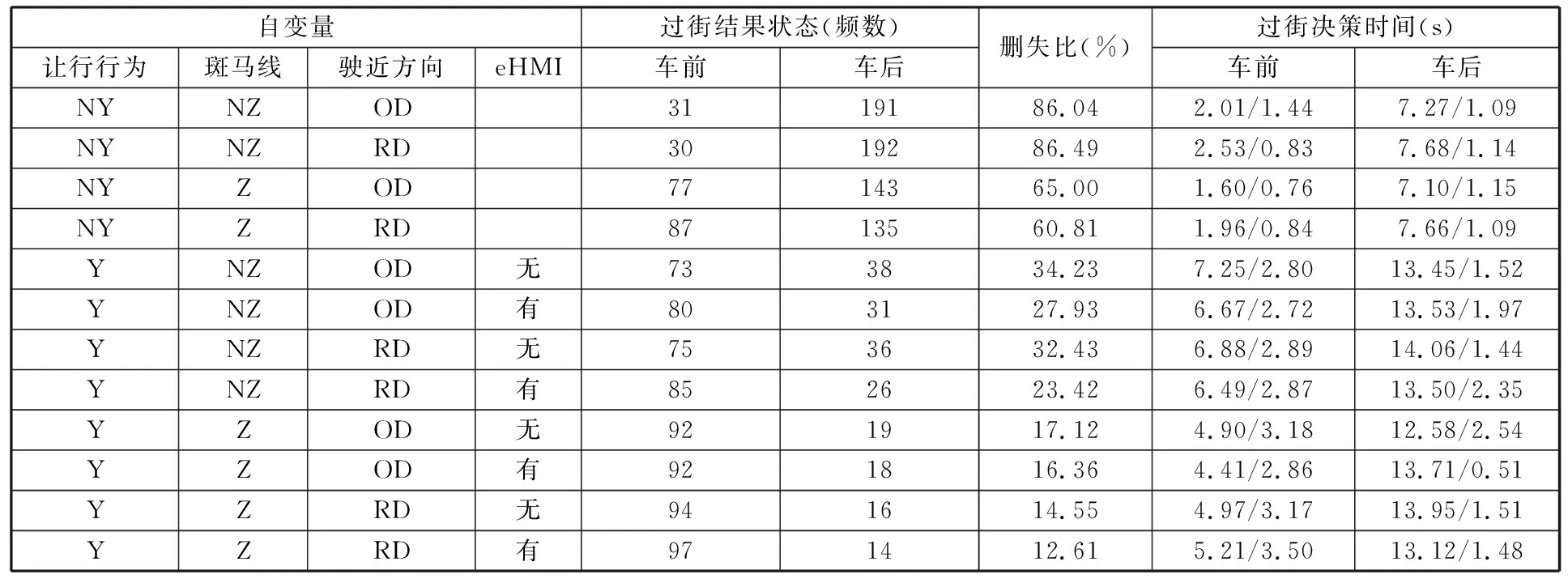
表1 各條件下行人過街結(jié)果狀態(tài)與決策時(shí)間
行人在自動駕駛汽車讓行與不讓行兩種條件下的過街決策時(shí)間直方圖見圖3a。結(jié)合自動駕駛汽車在讓行與不讓行兩種條件下的速度模式(見圖2),可以更為直觀地看出行人過街決策時(shí)間的分布與自動駕駛汽車速度模式間的關(guān)系。在不讓行情況下,行人的過街決策時(shí)間呈現(xiàn)出J形分布,約有25.40%的行人在自動駕駛汽車減速駛近過程中開始過街,其他行人則在自動駕駛汽車駛離后開始過街。在自動駕駛汽車讓行情況下,行人的過街決策時(shí)間呈現(xiàn)出多峰分布,多數(shù)行人的過街模式表現(xiàn)為在汽車距離較遠(yuǎn)時(shí)或距離較近但速度較低時(shí)從自動駕駛汽車前方過街,但仍有約20.88%的行人在汽車駛離后才開始過街。此外,在汽車讓行的條件下,有無eHMI時(shí)行人的過街決策時(shí)間直方圖見圖3b,在有/無eHMI兩種情況下,行人呈現(xiàn)出類似的過街結(jié)果狀態(tài)與決策時(shí)間分布。然而,與沒有eHMI相比,在有eHMI顯示自動駕駛汽車減速讓行意圖時(shí),更多行人更快地作出了從汽車前過街的決策,這表明eHMI能夠在一定程度上促進(jìn)行人對自動駕駛汽車減速狀態(tài)與讓行意圖的感知與理解,從而縮短決策時(shí)間并從車前過街。
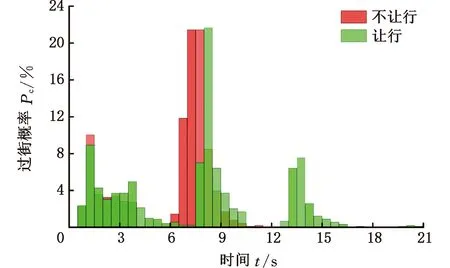
(a)讓行與不讓行條件
2.2 Kaplan-Meier生存分析
根據(jù)上一節(jié)對生存分析中終點(diǎn)事件和生存時(shí)間的定義,將各自變量、過街結(jié)果狀態(tài)與過街決策時(shí)間數(shù)據(jù)導(dǎo)入IBM SPSS Statitics 20統(tǒng)計(jì)分析軟件中,先進(jìn)行單因素Kaplan-Meier生存分析,篩選對行人過街生存率有顯著影響的變量再進(jìn)行多因素Cox比例風(fēng)險(xiǎn)模型回歸分析。各變量的行人過街生存曲線見圖4,其中橫軸為等待時(shí)間(生存時(shí)間),縱軸為累積生存率(即截止到某一時(shí)刻仍未開始過街的行人比例)。
從圖4中可以看出,自動駕駛汽車的讓行行為、斑馬線設(shè)施以及eHMI對行人過街的生存率有顯著影響(風(fēng)險(xiǎn)比Hazard Ratio>1且Log-rank檢驗(yàn)下的顯著性水平pL<0.05)。其中,風(fēng)險(xiǎn)比表示協(xié)變量的效應(yīng)大小,即某一因素對“生存”的影響程度,風(fēng)險(xiǎn)比值大于1在研究中意味著會提高行人過街的概率。汽車的駛近方向?qū)π腥说倪^街決策時(shí)間與狀態(tài)影響不顯著(pL=0.70)。除自動駕駛不讓行情況,其他變量的各水平下,行人過街的生存曲線均遵循相似的模式,即:在0~4 s內(nèi)生存率逐漸降低(行人距離汽車較遠(yuǎn)時(shí),作出盡早、盡快過街決策);在5~8 s內(nèi)生存率降速放緩(隨著汽車駛近,行人過街意愿降低);在8~10 s內(nèi)生存率迅速下降(行人感知到自動駕駛汽車的主動讓行意圖,大量行人開始過街);隨后生存曲線趨于平緩,出現(xiàn)大量刪失數(shù)據(jù),這是由于自動駕駛汽車加速駛過行人所在位置,行人開始從車后過街。
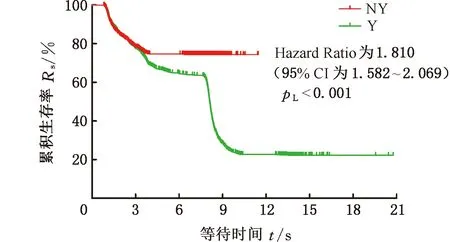
(a)讓行行為
此外,從圖4a中可以看出,在0~4 s內(nèi),兩條生存曲線呈現(xiàn)出相同的下降趨勢,即不論汽車讓行與否,約有25%的行人會在4 s內(nèi)作出過街決策(見兩條生存曲線的重合部分)。隨后由于讓行條件下汽車的減速、停車行為,兩條生存曲線在8 s后開始呈現(xiàn)出更明顯的差異。這表明汽車運(yùn)行狀態(tài)對行人過街決策的影響主要體現(xiàn)在行人與汽車距離較近時(shí),此時(shí)行人能夠比較準(zhǔn)確地感知、判斷汽車的運(yùn)行狀態(tài)與意圖。從圖4b中可以看出,在有斑馬線的條件下,累積生存率在4 s內(nèi)迅速下降至60%,兩種條件下的生存率差異逐步增大;在8 s后兩條生存曲線間的差異縮小,這表明斑馬線設(shè)施能夠幫助行人明確沖突道路的優(yōu)先使用權(quán),進(jìn)而在過街間隙出現(xiàn)時(shí)作出快速過街的決策,但斑馬線的這種提示效應(yīng)會在距離汽車較近時(shí)被削弱。與汽車讓行行為和斑馬線設(shè)施相比,eHMI變量下兩條生存曲線的差異相對較小,并且主要體現(xiàn)在4~8 s內(nèi),結(jié)合圖2中自動駕駛汽車在讓行時(shí)的速度模式,此時(shí)自動駕駛汽車處于低速行駛或停車狀態(tài)。圖4c表明自動駕駛汽車的駛近方向(對向/右側(cè))對行人的過街決策影響不顯著。圖4d中,在有eHMI的情況下,累計(jì)生存率降速較快,表明本實(shí)驗(yàn)中的eHMI有助于行人理解汽車的讓行意圖,因而縮短了過街決策時(shí)間;但結(jié)合問卷調(diào)查結(jié)果與圖3中有無eHMI時(shí)行人的過街頻率可以看出本實(shí)驗(yàn)中eHMI對行人的提示效應(yīng)很微弱。
2.3 Cox生存分析
將上述顯著影響行人過街“生存率”的因素導(dǎo)入SPSS軟件中進(jìn)行多因素Cox生存分析,各自變量及其交互項(xiàng)的回歸系數(shù)(β)、標(biāo)準(zhǔn)誤(es)、顯著性水平(p)、Wald統(tǒng)計(jì)量及風(fēng)險(xiǎn)比(Exp(β))等參數(shù)如表2中模型1數(shù)據(jù)所示。由于本研究中eHMI僅用于表征汽車的讓行意圖,僅半數(shù)讓行試次中涉及eHMI變量,因此對讓行條件下的變量(含eHMI)進(jìn)行了第二次Cox生存分析,相關(guān)參數(shù)如表2中模型2所示。
Cox回歸分析結(jié)果表明,與不讓行條件相比,自動駕駛汽車主動讓行能夠顯著提高行人從汽車前過街的比例,為前者的2.889倍(β=1.061,Wald(1)=41.634,p<0.001)。與沒有斑馬線設(shè)施相比,斑馬線設(shè)施能夠明確行人在道路使用權(quán)沖突路段的優(yōu)先權(quán),有斑馬線時(shí)行人在自動駕駛汽車前過街的比例為無斑馬線時(shí)的3.573倍(β=1.273,Wald(1)=58.557,p<0.001)。此外,斑馬線設(shè)施與汽車讓行行為間存在交互效應(yīng)。考慮eHMI的作用時(shí),斑馬線設(shè)施同樣能夠提高行人在汽車前過街的概率,為無斑馬線時(shí)的2.016倍(β=0.701,Wald(1)=40.208,p<0.001)。與沒有eHMI相比,通過呈現(xiàn)于自動駕駛汽車擋風(fēng)玻璃邊緣的光帶類eHMI來表征汽車的讓行意圖,能夠促進(jìn)行人對自動駕駛汽車運(yùn)行狀態(tài)與意圖的感知,行人從車前過街的概率為無eHMI時(shí)的1.261倍(β=0.232,Wald(1)=4.190,p=0.041)。
3 結(jié)果討論
本研究通過設(shè)計(jì)行人與自動駕駛汽車在虛擬現(xiàn)實(shí)環(huán)境中的交互實(shí)驗(yàn),探索道路交通環(huán)境中有無斑馬線設(shè)施、自動駕駛汽車讓行行為與駛近方向以及外部人機(jī)交互界面等因素對行人過街行為的影響,運(yùn)用Kaplan-Meier和Cox回歸對行人過街決策結(jié)果與決策時(shí)間進(jìn)行了生存分析。
本研究證實(shí)了斑馬線設(shè)施以及自動駕駛汽車讓行行為在行人過街決策中起主導(dǎo)作用,Cox生存分析結(jié)果表明,在有斑馬線和汽車主動讓行情況下行人從車前過街的比例分別是無斑馬線和不讓行情況下的3.573倍和2.889倍。從數(shù)值大小上看,有無斑馬線設(shè)施對行人過街行為的影響比汽車讓行行為更大,這與此前部分研究指出的“行人過街的決策主要受到汽車運(yùn)動學(xué)狀態(tài)的影響”結(jié)論不太一致。例如,SOLMAZ等[19]、CLAMANN[20]開展的行人與自動駕駛汽車交互實(shí)驗(yàn)結(jié)果表明,對行人過街決策(過街/不過街)影響最大的因素為人車間距、汽車速度或碰撞時(shí)間,其次為行人安全設(shè)施的存在與否或汽車外部人機(jī)交互界面呈現(xiàn)的信息。該差異是由于本研究關(guān)注行人過街結(jié)果狀態(tài)(重點(diǎn)關(guān)注行人從車前過街的行為)的同時(shí)也考慮了決策時(shí)間因素的影響,即哪些因素促使行人從車前過街并對其決策時(shí)間產(chǎn)生了影響。
首先,本研究發(fā)現(xiàn)行人安全設(shè)施的存在會顯著影響行人的過街決策(車前/車后過街)與決策時(shí)間(早過街/晚過街)。對比圖4a與圖4b可以發(fā)現(xiàn)斑馬線的存在會促使行人在與汽車距離較遠(yuǎn)(或等待時(shí)間較短)時(shí)發(fā)起過街,因而在0~4 s內(nèi)累計(jì)生存率差異迅速提高,此時(shí)汽車尚未呈現(xiàn)出明顯的讓行意圖。這表明,斑馬線對行人決策的影響主要體現(xiàn)在過街間隙出現(xiàn)的早期或距離汽車較遠(yuǎn)時(shí),而汽車運(yùn)行狀態(tài)對行人的影響作用時(shí)間相對較晚、距離相對較近,這對自動駕駛汽車的讓行模式設(shè)計(jì)提出的建議是在有斑馬線的路段必須為行人讓行。盡管這與此前部分研究指出的顯式信息或環(huán)境信息主要存在于行人與汽車的近距離交互中并發(fā)揮次要作用不一致[21],但也表明生存分析方法能夠有效揭示不同因素對行人過街行為的影響過程。因此,本文使用生存分析方法重點(diǎn)考慮行人在自動駕駛汽車前過街的決策結(jié)果與決策時(shí)間,與實(shí)際情況更為貼合,在解釋行人的感知、決策與行為過程層面更為精細(xì)。
其次,本研究對自動駕駛汽車主動讓行情況下50%試次的eHMI進(jìn)行了操控,生存分析結(jié)果表明,eHMI雖然不是影響行人過街的主導(dǎo)因素,但是能夠在一定程度上促進(jìn)行人對自動駕駛汽車減速讓行意圖的理解,縮短過街決策時(shí)間,進(jìn)而提高交通效率。雖然有研究指出行人的過街決策不依賴于汽車傳達(dá)出的顯式信息(包括eHMI),即eHMI不會成為未來自動駕駛汽車規(guī)模化、商業(yè)化應(yīng)用的障礙[21],但是HABIBOVIC等[22]的調(diào)查結(jié)果表明行人在與有eHMI的自動駕駛汽車交互過程中可感知到的安全性與愉悅度更高,并且行人在經(jīng)過簡短的培訓(xùn)后能準(zhǔn)確、迅速地理解eHMI所傳達(dá)的自動駕駛汽車信息。這與本研究的發(fā)現(xiàn)一致,盡管在實(shí)驗(yàn)開展過程中未告知被試本研究中自動駕駛汽車eHMI所傳達(dá)的汽車信息,但事后訪談結(jié)果表明,約有50%的被試提到eHMI對他們的過街決策產(chǎn)生了影響;約有31%的被試在經(jīng)歷若干次與帶有eHMI的自動駕駛汽車的交互后,能夠準(zhǔn)確解釋該eHMI的含義。然而,這一比例也揭示了本研究中eHMI設(shè)計(jì)方案中提示效應(yīng)的有限性。一方面,此前的研究(如EISMA等[23]與GUO等[24])表明光帶式eHMI相比于文本式或圖案式eHMI在行人的感知與理解方面更為模糊,但后者在跨文化可用性與遠(yuǎn)距離可視性方面存在爭議。因此,本研究中部分被試未能在有限的交互次數(shù)中感知到青色eHMI傳達(dá)的含義。另一方面,近兩年的研究(如HOCHMAN等[25]與LEE等[26])指出,在與自動駕駛汽車交互的過程中,行人在感知eHMI的含義時(shí)存在顯著的學(xué)習(xí)效應(yīng),即隨著接觸同一eHMI的次數(shù)的增加,行人會強(qiáng)化eHMI設(shè)計(jì)特征與汽車其他隱式或顯式特征的聯(lián)系,逐漸理解eHMI傳達(dá)的自動駕駛汽車狀態(tài)或意圖信息,并最終加快決策的過程。這對本文的設(shè)計(jì)啟示為,事先告知行人光帶式eHMI的含義或?qū)π腥诉M(jìn)行必要的培訓(xùn)可能會進(jìn)一步縮短行人的決策時(shí)間、提高人車交互與交通系統(tǒng)的效率。
此外,本文通過對行人過街等待時(shí)間進(jìn)行統(tǒng)計(jì)分析發(fā)現(xiàn),在自動駕駛汽車不讓行的情況下,行人的決策時(shí)間表現(xiàn)為J形分布,而在讓行情況下,表現(xiàn)為多峰分布。這與LI[27]關(guān)于行人過街仿真研究的結(jié)果一致,即行人的過街等待時(shí)間一般表現(xiàn)為U形分布,在特定的道路交通環(huán)境下可能衍變?yōu)镴形或L形分布。一方面,行人的過街開始時(shí)間受到汽車運(yùn)行狀態(tài)的影響,例如,大部分行人選擇在汽車低速或停車時(shí)從車前過街,或等待至汽車駛離后從車后過街(如圖3直方圖中6 s后數(shù)據(jù)所示)。此外,行人的過街決策時(shí)間也受到行人自身特質(zhì)的影響,風(fēng)險(xiǎn)偏好的行人可能會在不充分獲取車輛、道路、交通信息的情況下或在任意可能的時(shí)刻下作出過街決策[27],如圖4a與圖4b所示,不論汽車減速或讓行與否、斑馬線有無,總有約20%的行人在4 s內(nèi)迅速過街。
4 結(jié)論
本研究從行人-汽車-環(huán)境系統(tǒng)的視角出發(fā),探索道路交通系統(tǒng)中行人安全設(shè)施、自動駕駛汽車讓行行為、駛近方向以及外部人機(jī)交互界面等因素對行人在與自動駕駛汽車交互過程中過街決策與行為的影響。研究通過行人與自動駕駛汽車在虛擬現(xiàn)實(shí)環(huán)境中的交互實(shí)驗(yàn),獲取行人在交互過程中的過街結(jié)果狀態(tài)與等待時(shí)間,并使用生存分析的相關(guān)理論與方法進(jìn)行數(shù)據(jù)分析。研究結(jié)果表明:在與自動駕駛汽車交互的過程中,道路環(huán)境中的斑馬線設(shè)施、自動駕駛汽車的讓行行為是影響行人過街決策和時(shí)間的主要因素,能夠顯著提高行人從車前過街的概率(分別為無斑馬線設(shè)施、汽車不讓行時(shí)的3.573、2.889倍),并且前者對行人決策的影響體現(xiàn)在過街間隙出現(xiàn)的早期,自動駕駛汽車讓行行為的影響相對滯后。位于擋風(fēng)玻璃邊沿的光帶式eHMI能夠在一定程度上輔助行人感知、判斷汽車的讓行意圖、縮短過街等待時(shí)間,但可能需要針對eHMI的功能進(jìn)行必要的培訓(xùn)。本文的實(shí)驗(yàn)設(shè)計(jì)和數(shù)據(jù)處理方法為研究行人與自動駕駛汽車的交互過程提供了可行的思路。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
體育科技文獻(xiàn)通報(bào)(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
民用飛機(jī)設(shè)計(jì)與研究(2019年4期)2019-05-21 07:21:24
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
作文大王·低年級(2016年4期)2016-04-18 00:24:37