用于水泥電桿爬桿的仿生機器人設計*
2023-03-13 11:14:24陳明豪孫亞楠楊皓宇劉曉陽
科技創(chuàng)新與生產力 2023年1期
關鍵詞:設計
陳明豪,王 卓,孫亞楠,楊皓宇,劉曉陽
(河北科技大學機械工程學院,河北 石家莊 050018)
近年來,我國電力工業(yè)發(fā)展步伐不斷加快,電網(wǎng)事業(yè)也不斷發(fā)展。隨著我國電網(wǎng)覆蓋率的提升,供電可靠性的要求也越來越高。目前,配電帶電作業(yè)需要高技能的人員和絕緣斗臂車等昂貴的操作設備;在野外的水泥電桿檢修方面,限制條件則更大,由于地形、氣候等環(huán)境因素影響,電力工人通常需要依靠人力進行攀爬維修,這往往是一項充滿挑戰(zhàn)且艱巨的任務,這種高空作業(yè)同時也伴隨著高危險系數(shù)、高強度和高難度。設計一款具備攀爬功能并能實現(xiàn)特定工作的機器人,不僅能夠解放人力,而且能夠保障工人人身安全,因此國內外眾多學者對此開展研究。自20世紀以來,國內外研究人員已經(jīng)開發(fā)出各種各樣類型的爬桿機器人,將人類從高危險系數(shù)、高強度和高難度的高空作業(yè)中解放出來。
爬桿機器人除了實現(xiàn)最基本的爬桿能力,還需要有一些開展其他工作的附加能力,這是目前許多爬桿機器人所忽略的。為了完成不同的工作任務,有的機器人需要安裝有實現(xiàn)一些特定功能的裝置,例如添加一個特殊的抓手或小型機械臂,這對機器人的控制提出了更高要求。通過分析機器人爬行過程中最重要的兩點要素——安全性和靈活性,本文提出一種仿樹懶式的仿生爬桿機器人。該仿生爬桿機器人可以實現(xiàn)在水泥電桿、路燈桿等桿狀物體上夾持爬升、下降,從而接近導線或者帶電體,并能開展部分配電帶電作業(yè)項目工作[1]。
1 系統(tǒng)設計
1.1 仿生爬桿機器人基本性能需求
由于仿生爬桿機器人需要攀爬至較高的桿件上,進行清洗、檢測、維護等高空作業(yè),因此需要滿足以下基本性能需求。
1)較強的機動性能。機動性能包括爬行方向、爬行速度、越障能力、避障能力等。除此之外,還需要具備一定程度的變直徑桿件適應能力,這就需要仿生爬桿機器人具有一定的自鎖能力。
2)安全性與可靠性。從作業(yè)環(huán)境來看,仿生爬桿機器人通常需要爬升在8~20 m甚至更高的桿件上,這就要求仿生爬桿機器人具有良好的安全性與可靠性,具有較強的自鎖能力和發(fā)生意外的保護措施,避免造成控制失靈、部件掉落、高空墜落等意外。
3)智能化。現(xiàn)有的仿生爬桿機器人基本無法實現(xiàn)自主決策,對于一些突發(fā)情況無法做出即時反應,這就要求設計的仿生爬桿機器人向智能化發(fā)展,以人工智能(Artificial Intelligence,AI)技術、先進制造技術、自動化技術為基石,提高其自我感知、自適應等能力,融入第五代移動通信技術(5G技術)等“智能+”元素,從而使之更好地為人類服務。
1.2 仿生爬桿機器人總體方案設計
為了使仿生爬桿機器人兼具良好的機械性能和安全性,需要為其選擇合理的貼附方式和運動移動方式。目前,主流的機器人貼附方式有吸附式和夾持式這2種;運動移動方式則有輪式、履帶式、腿式和蠕動式這4類。將這些貼附方式和運動移動方式進行組合,可以得到多種風格的仿生爬桿機器人。通過網(wǎng)上查詢,取得生活中的各類桿件尺寸數(shù)據(jù),提出并討論“仿生爬桿機器人如何自適應不同粗細桿件”這一關鍵問題,引出爬行變直徑桿件問題的解決方法,最終采用拉彈簧式剛性抱爪的設計,通過對抱爪上的拉彈簧施加初始預緊力,完成對一定范圍變直徑桿件的自適應。
通過對各類爬桿機器人的利弊分析,學習應用于仿生爬桿機器人的新技術、新方法、新理論研究成果,通過觀察不同的動物爬行桿件的運動步態(tài)、攀爬的流暢度和牢固程度,發(fā)現(xiàn)樹懶的四臂就像4個鉤子牢牢地抓住桿件,兩兩對角交替地爬行,動作連貫且攀爬穩(wěn)固。受到樹懶爬行的啟發(fā),通過模仿樹懶的長臂并結合人類目前使用最多的爬桿工具——腳扣,設計出一種類似腳扣形裝的夾持式爬行機械結構,這種機械結構不僅可以自適應實現(xiàn)自鎖,而且在滿足攀爬要求的同時,保證了安全性與可靠性。這種自適應調節(jié)夾持力的能力使其具有較好的攀爬運動靈活性,解決了變直徑桿件問題。通過給仿生爬桿機器人設計的4個機械抱爪,使仿生爬桿機器人具有多足式的優(yōu)點,且相比輪式和蠕動式具備更好的越障能力,解決了吸附式爬桿機器人的負載能力薄弱問題;但多足式的仿生爬桿機器人運動速度較慢,對傳動要求較高[2]。圖1為仿生爬桿機器人的整體三維模擬圖。
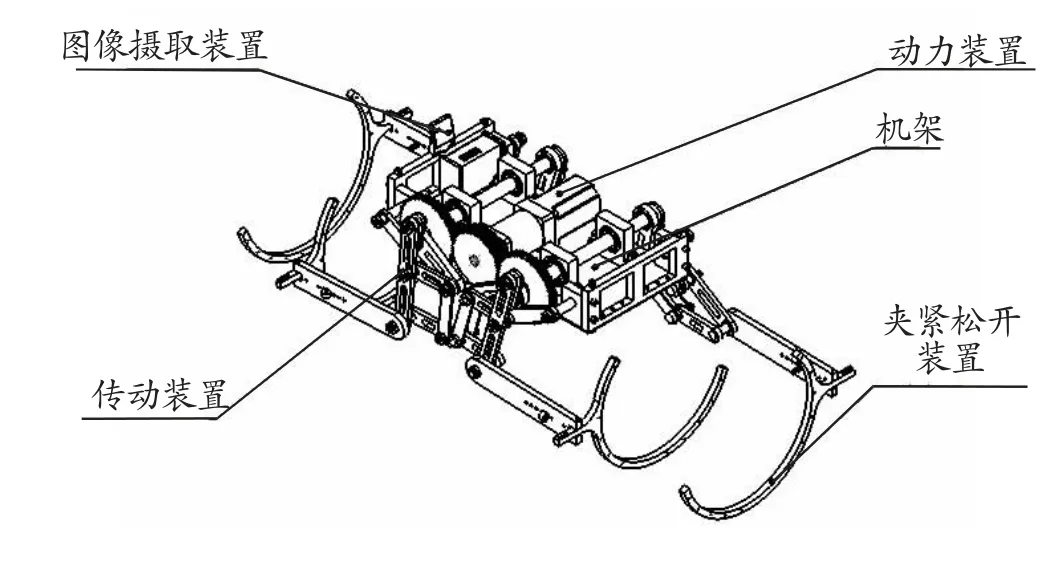
圖1 仿生爬桿機器人的整體三維模擬圖
1.3 傳動裝置設計
要讓機器人像動物一樣流暢地爬行,傳動裝置的設計是重中之重,傳動裝置需要將來自電機的輸出扭矩通過齒輪、連桿等傳遞到仿生爬桿機器人的各個執(zhí)行構件。圖2為傳動裝置的三維模擬圖。

圖2 傳動裝置的三維模擬圖
通過模仿樹懶爬行動作,進行仿生爬桿機器人的運動步態(tài)設計(即樹懶前后爪的聯(lián)動的運動步態(tài):先由前左爪和后右爪同時抓緊樹干,前右爪和后左爪向上爬行;再由前右爪和后左爪同時抓緊樹干,前左爪和后右爪向上爬行)。根據(jù)該運動步態(tài)設計方案,采用切比雪夫連桿機構作為仿生爬桿機器人的主要傳動構件,可以將電機的旋轉運動轉換為機械臂的直線運動和曲線運動的間歇往復運動,以實現(xiàn)仿生爬桿機器人的攀爬和越障[3]。圖3為傳動裝置的運動步態(tài)。

圖3 傳動裝置的運動步態(tài)
1.4 夾緊松開裝置設計
運動過程中,電機驅動后經(jīng)過減速器減速后輸出合適扭矩,之后經(jīng)過齒輪和連桿傳動將動力傳至腳扣。以向上爬升為例,對角的兩對角腳扣為一組,各自受一個聯(lián)動齒輪控制。第一組腳扣上升時,第二組腳扣依靠自身重力與連桿上的彈簧拉力,自適應調節(jié)夾緊力,在水泥電桿上形成自鎖,以此固定自身;第一組腳扣上升完畢后,繼續(xù)重復以上運動過程,帶動機器人持續(xù)向上爬升。圖4為夾緊松開裝置的三維模擬圖。
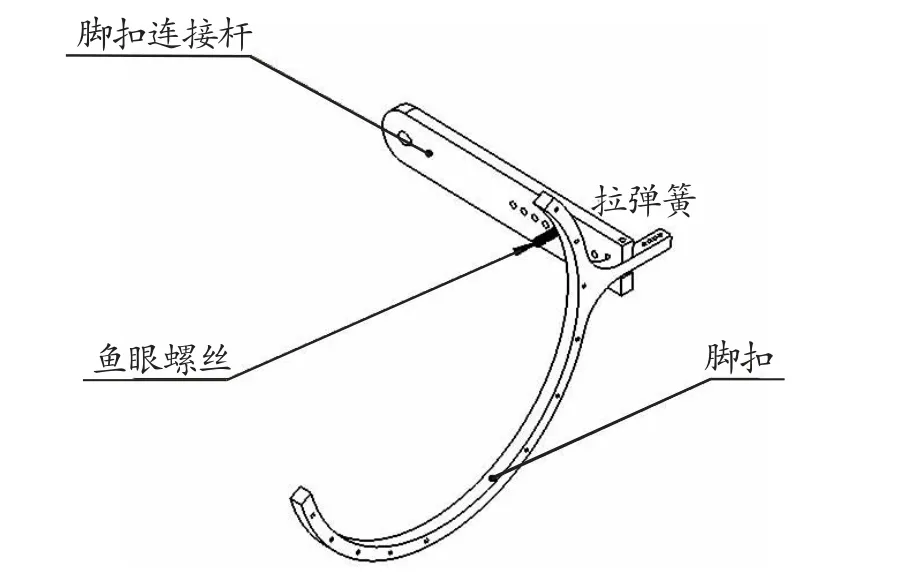
圖4 夾緊松開裝置的三維模擬圖
2 控制模塊設計
2.1 5G下的低延時傳輸與控制
在該仿生爬桿機器人的電氣控制設計中,采用了5G技術作為數(shù)據(jù)傳輸和機械控制的載體,此技術具有傳輸速率較高、能夠提供穩(wěn)定和多個接入點鏈接、數(shù)據(jù)傳輸?shù)脱訒r等一系列特點,是當前無線技術實現(xiàn)人機物互聯(lián)的網(wǎng)絡性基礎設施。以5G技術為代表的無線廣播通信技術與工業(yè)經(jīng)濟發(fā)展深度融合,相互協(xié)作,為制造業(yè)等工業(yè)領域的數(shù)字化、網(wǎng)絡化、智能化、全自動化、無人化發(fā)展提供了新的實現(xiàn)途徑。
在本次設計項目中,設計人員選用樹莓派4B+、廣角無畸變攝像頭、MH5000-82模組作為硬件以完成設備的傳輸與控制。廣角無畸變攝像頭進行視頻流的采集,采集完成之后交由流媒體處理模塊進行處理,對其進行下采樣,使其能夠在有限的性能內提高運算效率,同時降低碼流,減少視頻傳輸?shù)乃俣纫螅籑H5000-82模組為展銳UDX710平臺,具備尺寸小、穩(wěn)定性高等一系列特點,在5G SA模式下的最高下行速率為2 Gb/s,最高上行速率為1Gb/s,在多次測量中,其平均延時低于20 ms,滿足本次設計項目的使用需求[4]。
2.2 基于深度學習的電網(wǎng)故障檢測
隨著我國生產力的不斷提高和智能化的不斷發(fā)展,電能已成為人們生產生活娛樂休閑中不可缺少的能源類型,已在大范圍上取代石油、天然氣等化石能源。一方面,我國的電網(wǎng)建設開始較晚,技術迭代較多;另一方面,電網(wǎng)傳輸總長度位居全球前列,因此我國的電網(wǎng)自動化程度和智能化程度,隨著地區(qū)和建設時間的不同而產生了一定的差異性。隨著電網(wǎng)使用年限的逐漸增加,電網(wǎng)設備逐漸老化,陸續(xù)產生了各種不同的故障。在我國用電基數(shù)大、用電量大的大背景下,當供電系統(tǒng)發(fā)生錯誤時,能夠方便快捷地完成錯誤判斷、識別錯誤類型、自動上傳錯誤報告,對穩(wěn)定安全供電具有重要的意義。
基于深度學習的電網(wǎng)故障檢測,其原理如下:通過各種傳感器以及感應設備獲取電流、電壓、電阻、阻抗、溫度等一系列物理信息,結合所采集到的圖像數(shù)據(jù)信息,進行神經(jīng)網(wǎng)絡判斷,根據(jù)其結果實現(xiàn)故障自動分析、報告提交等一系列功能。在各種傳統(tǒng)方法與現(xiàn)代技術不斷發(fā)展的背景下,AI與深度學習在電網(wǎng)故障檢測領域獲得了新的機會,其中神經(jīng)網(wǎng)絡卷積訓練技術作為其中的典型代表,被各國學者深入研究。但在不斷的研究和摸索中,發(fā)現(xiàn)其存在諸多方面的缺點:一是傳統(tǒng)的神經(jīng)網(wǎng)絡需要大量的算力進行運算,對硬件的要求較高,從而對研究投入物力財力的要求較高;二是模型訓練時需要不斷地手動調節(jié)各種參數(shù),比如閾值、權重、擬合基數(shù)等;三是模型訓練所需的數(shù)據(jù)較多,需要大量的時間去采集、標注數(shù)據(jù)。這些缺點造成了神經(jīng)網(wǎng)絡模型的訓練性價比較低、使用效果不理想等一系列問題,并且在當前的算力下,存在著系統(tǒng)辨認慢、有效比率低、實現(xiàn)過程復雜等一系列缺點。
在本次設計項目中,使用基于YoloV5算法的視覺識別神經(jīng)網(wǎng)絡,結合徑向基函數(shù)(Radial Basis Function,RBF)神經(jīng)網(wǎng)絡完成對電網(wǎng)的故障檢測,RBF神經(jīng)網(wǎng)絡[4]具有計算原理簡單易于理解、所需算力低、結構模型易于構建、總體收斂快、識別較準確的優(yōu)點,在基于YoloV5算法的視覺識別神經(jīng)網(wǎng)絡的初步識別下,可快速地完成電網(wǎng)識別。
3 結束語
本文總體介紹了仿生爬桿機器人結構的設計要點、運動原理、總體設計、傳動裝置結構方案。該仿生爬桿機器人從模塊化設計理念出發(fā),將不同功能進行模塊化設計,降低了裝置機構間的耦合性[5]。同時本文論述了一些關鍵裝置機構的設計方案,介紹了爬桿機器人在爬行過程中采用對角夾緊和松開桿件的理念。與其他類型的爬桿機器人的優(yōu)缺點進行了比較,采取切比雪夫連桿機構傳動方式為設計原理,達到了實現(xiàn)模仿樹懶攀爬、越障的設計要求。在本次設計項目中,設計人員還使用基于YoloV5算法的視覺識別神經(jīng)網(wǎng)絡結合RBF神經(jīng)網(wǎng)絡,完成對電網(wǎng)的故障檢測,達到快速識別電網(wǎng)的要求。
本次設計項目只是一個基礎的設計,在制作實物過程中存在許多不完善的地方,需要不斷實踐進行改進。研制出的仿生爬桿機器人大多應用于完成桿件清洗、維修等任務,但由于自重較大或者材料所限,只能攜帶較小的有效載荷,導致完成工作單一和無法適應一些惡劣環(huán)境,為了減少成本、提高效率,要求優(yōu)化承載平臺的設計,使其有更大的承載能力,為末端執(zhí)行機的搭載提供基礎[6]。同時需要添加更多控制內容,以提高其智能化程度,使其具有良好的人機交互能力,更好地為人類服務。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04