基于本體論的AEB關鍵場景生成方法研究
2023-03-11 03:24:46楊清蓉孫念怡
計算機仿真 2023年1期
關鍵詞:模型
楊清蓉,趙 津,孫念怡,劉 暢
(1. 貴州大學機械工程學院,貴州 貴陽 550025;2. 貴州大學現代制造技術教育部重點實驗室,貴州 貴陽 550025)
1 引言
根據世界衛生組織[1]的數據,2013年有100多萬人死于交通事故。隨著人工智能技術的發展,自動駕駛汽車(根據SAE[2]標準,等級3及以上)有望在將來減少這個數字。SAE等級1(駕駛員協助)和等級2(部分自動化)指駕駛員必須一直監控系統,并在發生系統故障時立即進行干預。從等級3(條件自動化)到等級5(全自動化),當責任從駕駛員轉移到了車輛上時安全評估變得尤其重要。與傳統的汽車系統相比,高級駕駛輔助系統(advanced driver assistance systems,ADAS)的工作狀態更加復雜和多樣,這使得傳統的道路場地測試已經無法滿足自動駕駛汽車的測試需求,另一方面,ADAS直接影響駕駛安全,因此在上市之前需要進行充分和全面的測試。在投入大量的時間和資源后,自動駕駛技術快速發展,高級駕駛輔助系統(ADAS)中的自動緊急制動(automated emergency braking,AEB)、前撞警告(Front Collision Warning,(automated emergency braking,AEB)、前撞警告(Front Collision Warning,FCW)和車道偏離警告(Lane Departure Warning,LDW)等已迅速投入市場。
2016年澳大利亞交通協會聲明高速公路上每秒鐘就有一起碰撞事故,其中大部分的碰撞事故是由于追尾。Euro-NCAP 的研究結果表明,AEB 系統可以避免27% 的交通事故,同時在很大幅度上降低事故人員的受傷害程度。因此,AEB系統受到了各國政府和企業的高度重視,如Euro-NCAP 從2014 年開始把AEB 場地測試結果納入整車安全性評價體系。
目前,自動駕駛汽車測試方法主要分為兩種[3],一種是基于場景的測試方法,另一種是基于里程的測試方法。基于里程的測試方法在經濟性和時效性方面存在不可彌補的缺陷,從統計學角度出發,驗證自動駕駛汽車比人類駕駛更安全,理論上應至少進行2.4億km以上的公共測試道路測試,這將是一個無比巨大的工程且受法律法規限制[4]。與之相比,基于場景的測試方法應用更加靈活,測試效率高且有針對性。基于此,針對場景測試的研究越來越受到國家、企業和高校的重視,如德國的PEGASUS項目,美國發起的“自動駕駛汽車可變性能測試”,我國推進北京、上海、天津等城市的智能網聯或自動駕駛示范區,2018年4月我國工信部、公安部和交通運輸部聯合發布了《智能網聯汽車道路測試管理規范(試行)》[5]。
隨著測試場景復雜程度急劇增加,場景數量也呈幾何級數增長。如文獻[6]中輸入16個影響因素,采用正交實驗方法(orthogonal experiment,OE)會導致測試場景數量的“空間災難”,測試場景數是349920000個;采用“窮盡性測試”(exhaustive testing,ET) 測試場景總數是497664000個,這樣的方法是不必要的且低效的。因此,該領域的研究將重點放在通過搜索關鍵場景來增強ADAS測試。
Bagschik等提出了基于場景生成的本體論方法,該方法設計5層模型描述場景參數[7]。因為本體論擁有有效的參數范圍、限制和其它領域知識,所以從本體論生成測試用例是可跟蹤的。利用分類圖所描述的本體可以更加直接的構造面向組合測試的整個系統。因此,Klück等[8]使用領域本體提供場景的環境模型,保證其生成合理的測試場景。
為了生成更多的關鍵場景,Zhao等人[9]和Huang等人[10]提出了加速評估方法,該方法采用重要性抽樣理論加速評估過程發現關鍵的場景,但是該方法僅考慮了特定駕駛輔助功能的有限因素,限制了其應用范圍。Menzel等[11]討論了測試自動駕駛車輛關鍵場景的方法,但未涉及如何自動地獲得關鍵場景。Gao等人提出了基于組合測試的測試場景自動生成策略[6]。Wotawa等人[12]討論了自動駕駛車輛對組合測試方法的需要。組合測試方法已被廣泛應用在計算機軟件測試領域[13],基于大多數程序錯誤是由多個影響因素相互作用造成的這一事實推動組合測試方法的發展。組合測試方法生成的測試場景集可以在場景數量盡可能少的情況保證其所需強度為n的全覆蓋。
Sotiropoulos等人[14]表明,3D仿真可以有效地用于尋找移動機器人軟件中的導航故障。因此,本文基于以往學者的研究采用本體論方法建立AEB環境模型,使用組合測試方法生成測試用例,最后仿真測試AEB測試場景。
2 AEB的環境本體
2.1 AEB縱向控制功能整體邏輯圖
自動緊急制動 (Autonomous Emergency Braking,AEB)是重要的主動安全技術,AEB系統檢測到車輛前方可能出現碰撞情況時,系統通過有效的自動制動避免碰撞或者減輕碰撞危害程度。圖1是AEB縱向控制功能整體邏輯,上層控制模型為AEB控制模型,其輸入量為兩車相對距離D和相對速度V,輸出為測試車輛加速度a;底層控制模型的輸出為節氣門開度(Throttle)和制動力(Brake)[15]。
碰撞時間(TTC)作為基于時間的安全度量指標檢測追尾事故,可用于評估AEB場景的危急程度[16]。本文研究主要關注三個變量,分別是自車速度、兩車相對距離D和自車制動力。碰撞時間TTC的定義
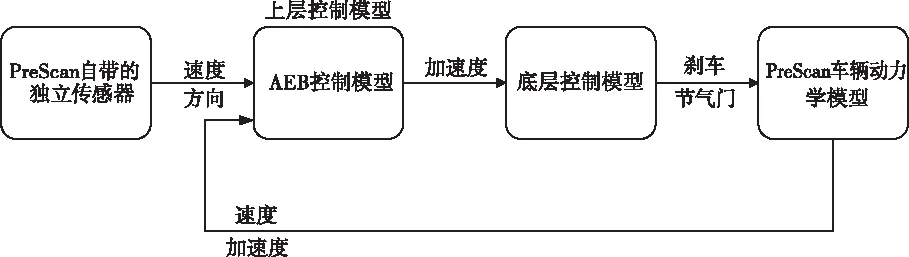
圖1 AEB縱向控制功能整體邏輯圖
TTC=-D/D′
(1)
式中,TTC為碰撞時間;D為兩車相對距離;D′為相對速度。
在仿真測試中設定TTC:TTC (預警危險)=2.6s,TTC(部分制動)=1.6s,TTC(全力制動)=0.6s。對于導致TTC值在0到1秒之間的測試場景(即接近碰撞或碰撞)定義為關鍵事件中的極端工況。
2.2 AEB環境本體
本體論是共享概念模型的明確的形式化規范說明,其特征是增加的復雜性需要高語義的表達能力,同時它描述了應用程序領域背后的知識。例如,在自動駕駛中,此類本體被用于決策、描述交通情況和導航。在場景測試中,特別是在生成測試用例時,通過本體提供特定實體及其關系的信息來提取測試用例。
概念本身可以描述一個實體,它可以來自現實世界,例如一輛車,也可以來自非物質描述,例如一個句子或一種(物理的)力量。概念是構成本體論的基本構建塊。概念也允許有屬性。例如,一個人有區別與他人的名字、生日和特殊屬性。屬性本身具有某種類型,如字符串或日期。因此,為了提供測試用例生成的輸入模型,本體論需要列舉類型作為基本的類型來指定對應于屬性的列舉元素。
本文引入了一個簡化的本體論定義[17],它基于將關系限制為組合和繼承的概念。具有屬性和特定類型的概念描述了輸入模型的基本實體。圖2描述了概念、屬性及其關系的圖示。概念對應于圖的頂點(如C1),關系對應圖的邊(如帶有箭頭和文字的線段),并且關系是包含兩個概念和一個類型組成的有向邊。
本體論已經在自動駕駛開發和測試的多個領域中被很好地建立起來。為了提高自動駕駛車輛功能的可靠性(如傳感器故障補償),研究人員[18]為抽象駕駛環境的表示和推理創造了一個本體模型,該模型能夠更好地理解交通狀況和傳感器限制,并為ADAS提供有效的數據源。Geyer等人[19]定義了常用術語,如自車和場景(動態元素,靜態元素和路網),和從自車的角度使用本體描述交通狀況。Bagschik等人[7]詳細討論了如何在自動駕駛領域的不同應用中使用本體,同時提出了一個掌握交通基礎設施的設計知識和交通參與者行為交互作用的本體。由于底層的轉換算法具有較高的計算復雜度必須保持盡可能小的本體,通過提取中國新車評價規程(C-NCAP)的參數取值范圍和代表值勾畫了一個簡化的AEB環境本體,如圖3所示。
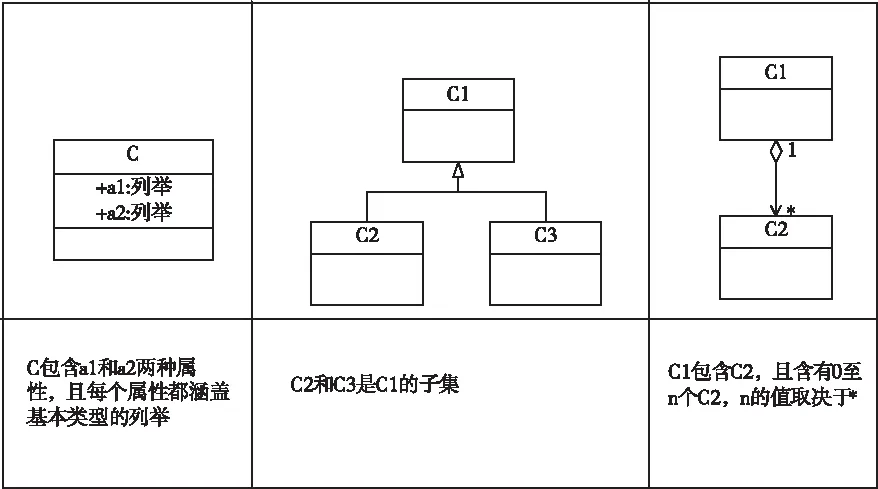
圖2[17] 本體論基本概念、屬性及其關系
AEB環境本體描述了用于測試AEB場景的所有實體,它包含4個概念(動態場景、自車、目標車輛和行人)和3個組合關系。其中,目標車輛的數量是1~3,行人數量是0~2(C-NCAP中存在行人數量為0的場景)。在每個概念中定義了動態信息(如速度和方向等)、實體的位置和類型。
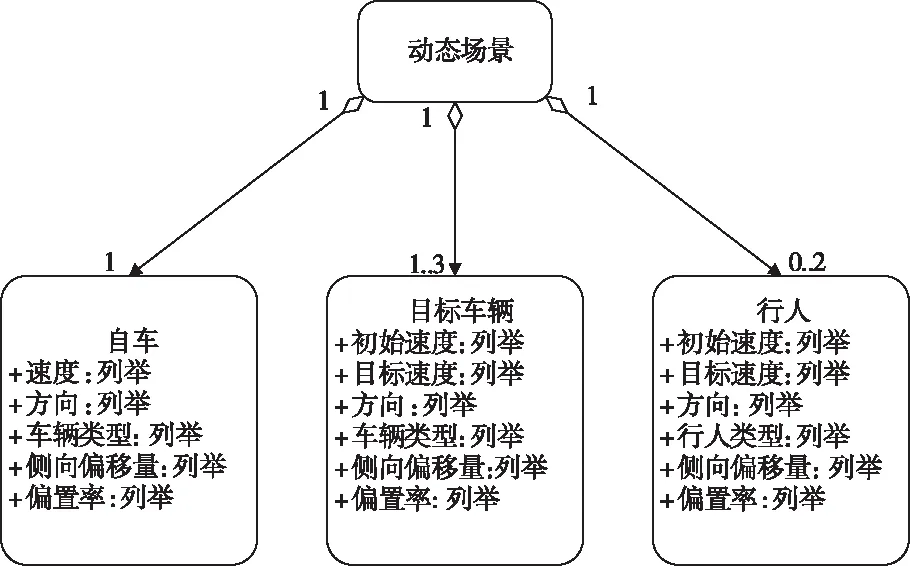
圖3 基于C-NCAP 的AEB環境本體
3 AEB功能關鍵場景生成
本節討論將本體轉換為組合測試的輸入模型。對于AEB環境本體(圖3)有3種組成關系:(動態場景,自車)、(動態場景,目標車輛)、(動態場景,行人),并獲得一組用于CT輸入模型的變量,即:
變量VCT={自車_速度,自車_方向,自車_車輛類型,自車_側向偏移量,自車_偏置率,目標車輛數量,目標車輛n_初始速度,目標車輛n_目標速度,目標車輛n_方向,目標車輛n_車輛類型,目標車輛n_側向偏移量,目標車輛n_偏置率,行人數量,行人s_初始速度,行人s_目標速度,行人s_方向,行人s_行人類型,行人s_側向偏移量,行人s_偏置率}(其中,n=1,2,3;s=1,2)。
變量域從中國新車評價規程(C-NCAP)的參數取值范圍提取。另外,生成測試用例之前需要添加必要的約束,如當車輛數為1時其它兩輛車輛的參數應該為空,即其它兩輛車不存在。當行人數量為0時行人的所有參數應該為空,即場景無行人。
在Windows 10系統下使用一臺Intel Core i9-10850 @ 3.6GHz的臺式電腦生成測試用例。輸入39個變量和36個約束后,采用ET測試方法場景總數是359538個,假設每個場景的測試時間為10s,則需要總時間0.74年。僅考慮時間的情況已經無法進行全覆蓋的遍歷式測試,為了解決這個問題,本文引入了組合測試中的成對獨立組合測試(Pairwise Independent Combinatorial Testing,PICT)[20]方法,該方法在保證組合覆蓋率的同時關注測試集的縮減。使用PICT工具計算強度為2的組合測試組僅2分鐘就可以獲得82個測試用例。表1展示了部分測試用例。
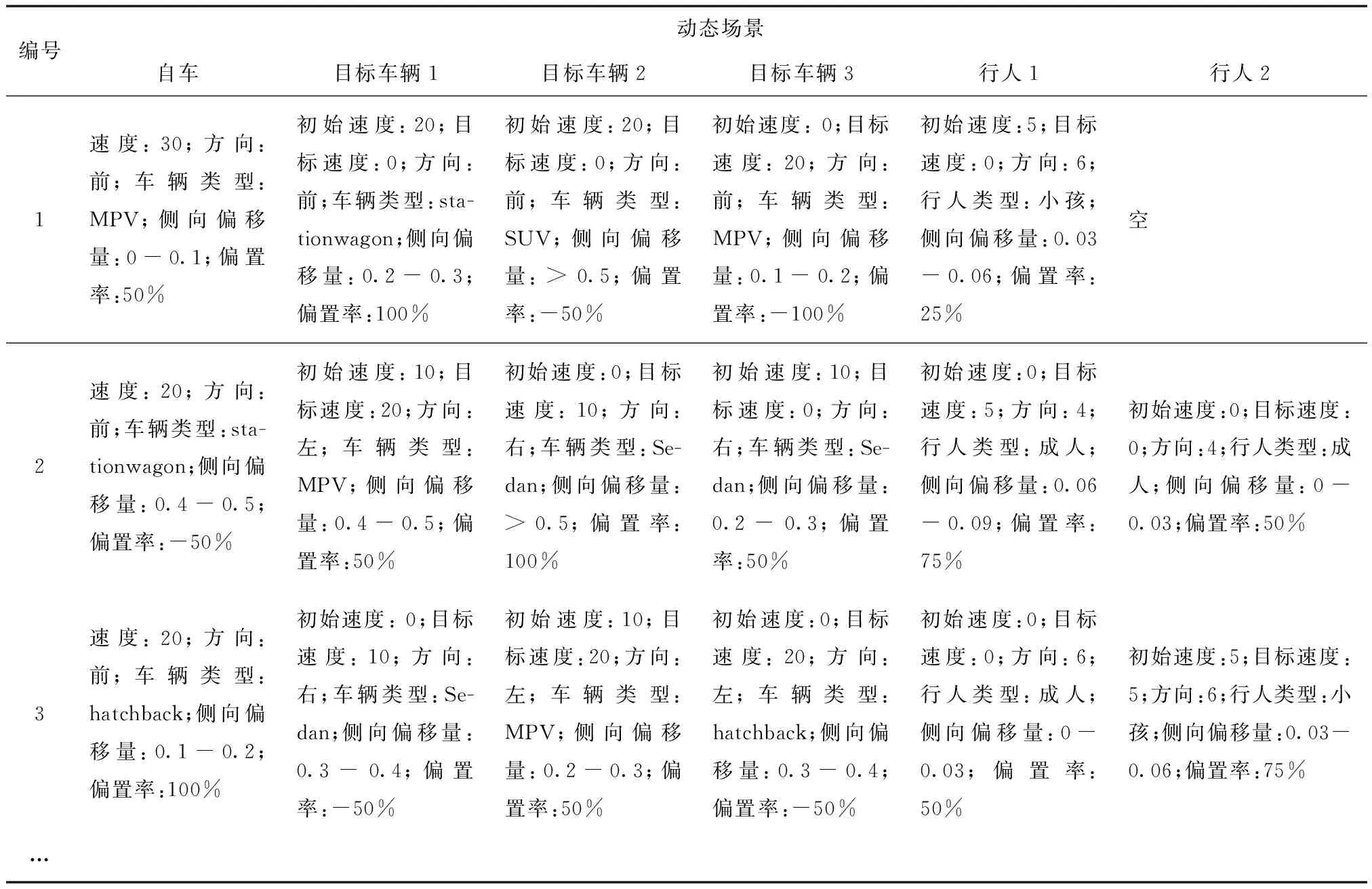
表1 測試用例部分示例
用餅狀圖說明測試用例的分布情況(圖4和表2),從餅狀圖可以看出,目標車輛數量為3和行人數量為2的測試用例占比達56.1%。因此,在實體間的多種相互作用下的測試用例具有更高的概率發現關鍵場景。
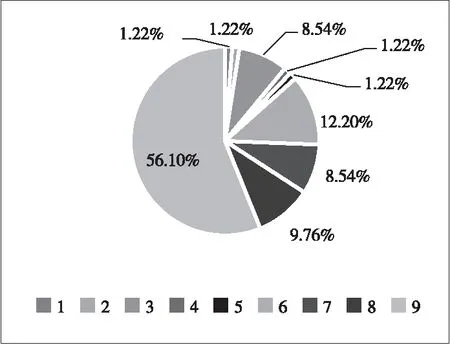
圖4 測試用例分布情況
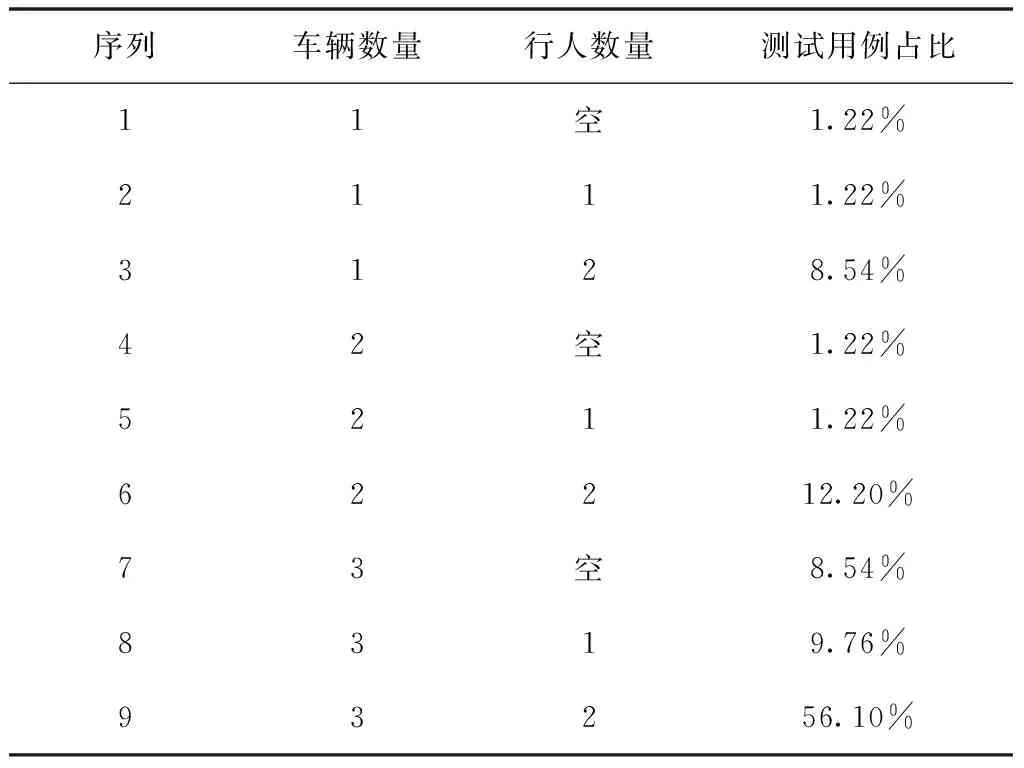
表2 測試用例分布情況
4 仿真與驗證
4.1 場景建模
本文選用的兩個場景。場景1驗證所選AEB算法的有效性,再將有效的AEB算法應用于場景2。
場景1選用《智能網聯汽車道路測試管理規范(試行)》中的前車靜止工況,自車以14m/s(約50km/h)的車速沿車道中間勻速接近前方靜止目標車輛,如圖5。測試要求:自車應在制動之前發出報警信息且目標車輛未與前車發生碰撞。
場景2選用組合測試方法生成的AEB關鍵場景,即車輛數量為3和行人數量為2。自車和目標車輛1均以14m/s(約50km/h)的車速沿車道中間勻速,另外目標車輛2和3靜止在鄰近車道,左側行人以1.4m/s(約5km/h)的速度從左向右橫穿馬路,右側行人以1.4m/s(約5km/h)的速度從右向左橫穿馬路,如圖6。測試要求:自車應在制動之前發出報警信息且自車未與目標車輛或行人發生碰撞。
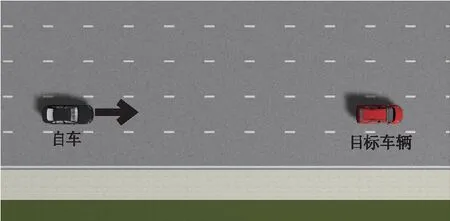
圖5 場景1(目標車靜止)
在Windows 10系統下使用一臺Intel Core i9 10850 @ 3.6GHz的臺式電腦進行虛擬仿真。測試場景由TNO的虛擬仿真軟件PreScan為ADAS建模[21]。建立一條長900m的直線道路。傳感器使用PreScan自帶的獨立傳感器(technology independent sensor,TIS),TIS1設定頻率25Hz,最大探測距離150m,俯仰角和水平角均為9°;TIS2設定頻率25Hz,最大探測距離45m,俯仰角80°和水平角9°。

圖6 場景2(關鍵場景)
本文選用PreScan自帶的車輛動力學模型,也可以使用CarSim軟件建立更加精細的測試車輛動力學模型聯合PreScan仿真。
4.2 仿真測試
場景1:測試中自車以恒定速度14m/s(約50km/h)靠近靜止的目標車輛。仿真過程輸出信息如圖7所示。在測試開始時,兩車相對距離86m,雷達探測到目標且未處于危險區域,本車未出現制動情況。3.9s時,AEB系統發出提示性警告。4.36s時,進入危險區域,AEB系統發出碰撞警告并開始以40%的制動壓力(60MPa)部分制動。5.976s時,系統開始全制動(150MPa)。本車速度在6.76s時降至0,此時相對距離達到最小值1.97m,成功避免碰撞。從場景1仿真結果可以看出(圖8),選用的AEB算法是有效的。
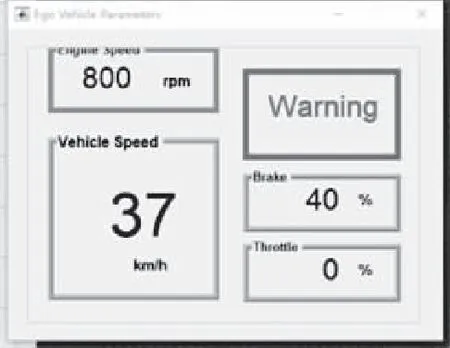
圖7 場景1仿真過程輸出信息
場景2:仿真過程輸出信息如圖9所示。測試中自車以恒定的速度14m/s和目標車輛(14m/s)穩定行駛4s后,目標車輛1開始減速至6m/s,同時左右兩邊行人都以1.4m/s (約5km/h)的速度橫穿馬路。自車探測到目標車輛1減速并做出了相應的制動后,目標車輛1加速離開時,左右側行人橫穿馬路接近自車,當自車探測到行人時全力制動(150MPa)但沒有成功避免碰撞行人。從仿真結果可以看出(圖10),自車碰撞右側行人,發生碰撞事故。
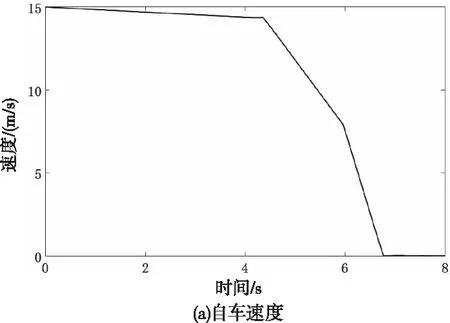
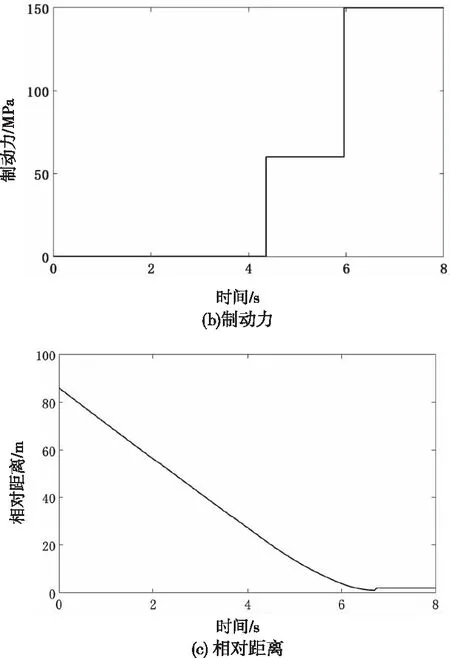
圖8 仿真結果
圖9 場景2仿真過程輸出信息
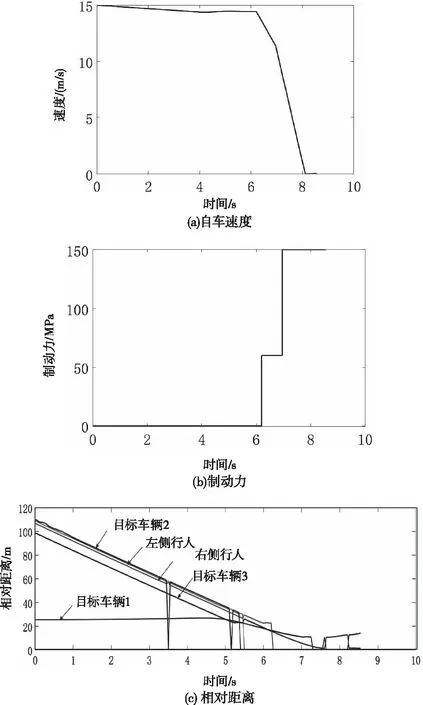
圖10 仿真結果
5 結論
針對AEB功能基于仿真測試復雜驗證需求的問題,本文應用本體論的方法建立環境模型作為組合測試的輸入模型,提取組合測試輸入模型變量,采用PICT工具自動生成82個測試用例。相比于ET測試方法,該方法更有效且提高了自動駕駛功能仿真測試場景的生成效率。在仿真軟件PreScan中運行場景2,自車和行人發生碰撞事故,實現了AEB功能關鍵場景的仿真測試。
在AEB環境本體模型中根據測試需求人為指定概念信息,未考慮概念信息真實分布特性,后續將基于自然駕駛數據集提取概念信息,提高本體環境模型的真實性和合理性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19