基于中國新車評(píng)價(jià)規(guī)程(C-NCAP)的主動(dòng)安全測(cè)試系統(tǒng)研究
2023-03-08 08:15:54蔣熊力忍肖廣宇楊新鵬劉漢渝
天津科技 2023年2期
關(guān)鍵詞:系統(tǒng)
蔣熊力忍,肖廣宇,張 帥,楊新鵬,劉漢渝
(中汽研汽車檢驗(yàn)中心(天津)有限公司 天津 300300)
0 引 言
中國是汽車生產(chǎn)制造大國,也是汽車保有量大國,汽車的廣泛使用在給人們帶來便捷的同時(shí),也產(chǎn)生了相應(yīng)的安全風(fēng)險(xiǎn)。車輛的安全性能對(duì)于道路運(yùn)輸行業(yè)發(fā)展及安全出行都有重要的影響,一些重大道路交通事故會(huì)給人們的生命財(cái)產(chǎn)造成巨大損失。隨著汽車技術(shù)的不斷發(fā)展,在被動(dòng)安全技術(shù)相對(duì)成熟的前提下,主動(dòng)安全成為更多學(xué)者和科技工作者所關(guān)注的方向。為推動(dòng)主動(dòng)安全技術(shù)的發(fā)展,相應(yīng)的標(biāo)準(zhǔn)和規(guī)程在不斷完善,尤其是從中國新車評(píng)價(jià)規(guī)程(C-NCAP)實(shí)施以來,國內(nèi)汽車整體的主動(dòng)安全技術(shù)水平得到大幅提高,車輛的主動(dòng)安全裝置的配置率也顯著提高,從而使國內(nèi)汽車產(chǎn)品的安全性能得到很大程度的提升[1-3]。
目前國內(nèi)檢測(cè)機(jī)構(gòu)開展主動(dòng)安全測(cè)試使用的主要是進(jìn)口設(shè)備,而進(jìn)口設(shè)備通常是依據(jù)國外標(biāo)準(zhǔn)設(shè)計(jì)的,如某品牌所用進(jìn)口設(shè)備是以 E-NCAP 標(biāo)準(zhǔn)為依據(jù)設(shè)計(jì)的,其中測(cè)試場(chǎng)景與國內(nèi)標(biāo)準(zhǔn)存在較大差異,國內(nèi)用戶在使用該設(shè)備過程中存在使用便捷性方面的問題。通過對(duì)主動(dòng)安全測(cè)試產(chǎn)品進(jìn)行合理的開發(fā)設(shè)計(jì)能有效提高試驗(yàn)效率。
1 主動(dòng)安全測(cè)試系統(tǒng)現(xiàn)狀
主動(dòng)安全測(cè)試系統(tǒng)主要用于主動(dòng)安全測(cè)試項(xiàng)目,測(cè)試場(chǎng)景主要包括車輛追尾自動(dòng)緊急制動(dòng)系統(tǒng)、行人自動(dòng)緊急制動(dòng)系統(tǒng)等。主動(dòng)安全測(cè)試系統(tǒng)的主要供應(yīng)商基本為國外公司,如英國的 AB Dynamics汽車測(cè)試系統(tǒng)公司、4activeSystems 技術(shù)集團(tuán)公司,國內(nèi)檢測(cè)機(jī)構(gòu)也主要使用其產(chǎn)品,在國內(nèi)市場(chǎng)占有率很高。
目前國外的主動(dòng)安全測(cè)試系統(tǒng)基本上沒有專為C-NCAP 主動(dòng)安全標(biāo)準(zhǔn)而設(shè)計(jì)的軟件。隨著國內(nèi)汽車主動(dòng)安全市場(chǎng)的逐步發(fā)展,測(cè)試需求不斷增加,面向國外標(biāo)準(zhǔn)開發(fā)的測(cè)試系統(tǒng)在一定程度上已不能滿足國內(nèi)主動(dòng)安全測(cè)試的需求。例如:在速度輔助系統(tǒng)測(cè)試項(xiàng)目中,C-NCAP 測(cè)試場(chǎng)景的限速標(biāo)識(shí)速度分為 40、60 km/h,E-NCAP 測(cè)試場(chǎng)景的限速標(biāo)識(shí)速度分為城市道路 50 km/h、城際道路 80 km/h、高速公路 120 km/h。 在行人自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試項(xiàng)目中,C-NCAP測(cè)試場(chǎng)景包括 CPFA-25、CPFA-50、CPNA-25、CPNA-75、CPLA-50和 CPLA-25共 6個(gè)場(chǎng)景,而E-NCAP測(cè)試場(chǎng)景包括CPFA-50、CPNA-25、CPNA-75、CPNC-50、CPLA、CPTA、CPRA。在二輪車自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試項(xiàng)目中,E-NCAP相比C-NCAP增加了AES測(cè)試。E-NCAP 相較于C-NCAP增加了倒車 AEB 測(cè)試項(xiàng)目、交叉路口轉(zhuǎn)彎 AEB 測(cè)試項(xiàng)目,C-NCAP 相較于 E-NCAP 增加了 BSD(車輛盲點(diǎn)監(jiān)測(cè)系統(tǒng))。通過以上列舉的差異可以看出,國外的主動(dòng)安全測(cè)試系統(tǒng)在應(yīng)用于國內(nèi)的測(cè)試時(shí)存在一定程度的短板[4-5]。
主動(dòng)安全測(cè)試系統(tǒng)主要用于與可導(dǎo)航移動(dòng)平臺(tái)和駕駛機(jī)器人硬件配套使用,國內(nèi)對(duì)主動(dòng)安全硬件及軟件盡管已具備一定的研究水平,但是行業(yè)認(rèn)可度較低,僅可用于內(nèi)部測(cè)試研究使用。行業(yè)認(rèn)可度較高的主動(dòng)安全測(cè)試系統(tǒng)往往是國外產(chǎn)品,而其測(cè)試場(chǎng)景設(shè)置通常都是基于國外標(biāo)準(zhǔn)進(jìn)行設(shè)計(jì),與國內(nèi)標(biāo)準(zhǔn)存在差異。通過對(duì)行業(yè)認(rèn)可的主動(dòng)安全硬件系統(tǒng)進(jìn)行二次開發(fā),可以保證在行業(yè)具備一定認(rèn)可度的同時(shí)提高主動(dòng)安全測(cè)試試驗(yàn)效率[6]。
2 主動(dòng)安全測(cè)試場(chǎng)景分析
C-NCAP主動(dòng)安全測(cè)試場(chǎng)景包括車輛追尾自動(dòng)緊急制動(dòng)系統(tǒng)(AEB CCR)、行人自動(dòng)緊急制動(dòng)系統(tǒng)(AEB VRU_Ped)、二輪車自動(dòng)緊急制動(dòng)系統(tǒng)(AEB VRU_TW)、車道保持系統(tǒng)(LKA)、車道偏離預(yù)警系統(tǒng)(LDW)、速度輔助系統(tǒng)(SAS)、盲區(qū)檢測(cè)車對(duì)車系統(tǒng)(BSD C2C)、盲區(qū)檢測(cè)車對(duì)二輪車系統(tǒng)(BSD C2TW)。標(biāo)準(zhǔn)要求試驗(yàn)車輛和目標(biāo)車輛在試驗(yàn)過程中數(shù)據(jù)采集和記錄設(shè)備精度應(yīng)滿足速度精度0.1 km/h(其中行人速度精度為0.01 km/h)、橫向和縱向位置精度0.03 m、橫擺角速度精度0.1°/s、縱向加速度精度0.1 m/s2、試驗(yàn)車方向盤角速度精度為1.0°/s。
2.1 車輛追尾自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試場(chǎng)景
車輛追尾自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試場(chǎng)景主要包括CCRs(前車靜止)和CCRm(前車慢行),其測(cè)試類型分為AEB與FCW(前向碰撞預(yù)警)。在CCRs測(cè)試場(chǎng)景中,用以測(cè)試車輛AEB性能的試驗(yàn)車輛速度分為3種,即20、30、40 km/h;用以測(cè)試車輛FCW性能的試驗(yàn)車輛速度分為4種,即50、60、70、80 km/h。在CCRm測(cè)試場(chǎng)景中,乘用車目標(biāo)物以20 km/h的速度在試驗(yàn)車輛前方行駛,用以測(cè)試車輛AEB性能的速度分別為30、40、50 km/h,用以測(cè)試車輛FCW性能的速度分別為60、70、80 km/h。不同測(cè)試速度對(duì)應(yīng)的偏置率如表1所示。
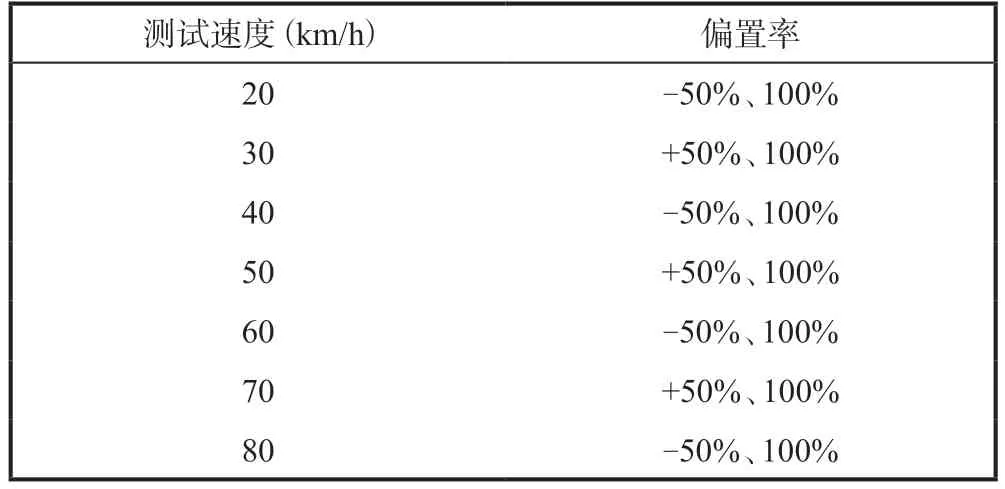
表1 測(cè)試速度對(duì)應(yīng)車輛偏置率Tab.1 Test speed corresponding to vehicle offset rate
2.2 行人自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試場(chǎng)景
行人自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試場(chǎng)景包括CPFA-25(車輛碰撞遠(yuǎn)端行人,碰撞位置在車輛前端的25%處)、CPFA-50、CPNA-25(車輛碰撞近端行人,碰撞位置在車輛前端的25%處)、CPNA-75、CPLA-50(車輛縱向碰撞行人,碰撞位置在車輛前端的50%處)和CPLA-25,其測(cè)試類型同樣包括AEB和FCW。
在遠(yuǎn)端測(cè)試場(chǎng)景中,行人的運(yùn)動(dòng)速度為6.5 km/h,碰撞位置為25%和50%處,試驗(yàn)車輛的測(cè)試速度分別為20、30、40、50、60 km/h。在近端測(cè)試場(chǎng)景中,行人目標(biāo)物的運(yùn)動(dòng)速度為5 km/h,碰撞位置為25%和75%,試驗(yàn)車輛的測(cè)試速度分別為20、30、40、50、60 km/h。在縱向測(cè)試場(chǎng)景中,行人的運(yùn)動(dòng)速度為5 km/h,碰撞位置為25%和50%處,其中25%對(duì)應(yīng)的測(cè)試速度分別為50、60、70、80 km/h,50%對(duì)應(yīng)的測(cè)試速度分別為20、30、40、50、60 km/h。
2.3 二輪車自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試場(chǎng)景
二輪車自動(dòng)緊急制動(dòng)系統(tǒng)測(cè)試場(chǎng)景包括CBNA-50(車輛碰撞近端自行車,碰撞位置在車輛前端50%處)、CSFA-50(車輛碰撞遠(yuǎn)端摩托車,碰撞位置在車輛前端50%處)、CBLA-25(車輛縱向碰撞自行車,碰撞位置在車輛前端25%處)、CBLA-50(車輛縱向碰撞自行車,碰撞位置在車輛前端50%處)。
在CBNA-50測(cè)試場(chǎng)景中,自行車的運(yùn)動(dòng)速度為15 km/h,試驗(yàn)車輛的測(cè)試速度分別為20、30、40、50、60 km/h。在CSFA-50測(cè)試場(chǎng)景中,踏板車的運(yùn)動(dòng)速度為20 km/h,試驗(yàn)車輛的速度分別為30、40、50、60 km/h。在CBLA-50測(cè)試場(chǎng)景中,自行車的速度為15 km/h,試驗(yàn)車輛的速度分別為20、30、40、50、60 km/h。在CBLA-25測(cè)試場(chǎng)景中,自行車的速度為15 km/h,試驗(yàn)車輛的速度分別為50、60、70、80 km/h。
2.4 車道保持系統(tǒng)測(cè)試場(chǎng)景
車道保持系統(tǒng)測(cè)試場(chǎng)景分為實(shí)線偏離測(cè)試和虛線偏離測(cè)試2種類型,其偏離方向分為左、右兩側(cè)。實(shí)線/虛線偏離測(cè)試的車輛速度為80 km/h,其橫向偏離速度分別為0.2、0.3、0.4、0.5 m/s,試驗(yàn)車輛從左右兩側(cè)偏離實(shí)線/虛線進(jìn)行測(cè)試。
2.5 車道偏離預(yù)警系統(tǒng)測(cè)試場(chǎng)景
車道偏離預(yù)警系統(tǒng)測(cè)試場(chǎng)景屬于程序文件中的可選審核項(xiàng)目,僅包含實(shí)線偏離測(cè)試,試驗(yàn)車輛的車速為80 km/h,橫向偏離速度分別為0.6、0.7 m/s,車輛分別從左、右兩側(cè)偏離實(shí)線進(jìn)行相應(yīng)測(cè)試。
2.6 速度輔助系統(tǒng)測(cè)試場(chǎng)景
速度輔助系統(tǒng)測(cè)試場(chǎng)景屬于可選審核項(xiàng)目,包含限速信息識(shí)別場(chǎng)景和超速報(bào)警場(chǎng)景。在限速信息識(shí)別測(cè)試場(chǎng)景中,限速標(biāo)志牌分別為40、60 km/h,試驗(yàn)車輛以與限速值相同的車速行駛。超速報(bào)警測(cè)試場(chǎng)景中,限速標(biāo)志牌速度與限速信息識(shí)別測(cè)試場(chǎng)景要求相同,試驗(yàn)車輛以在限速值基礎(chǔ)上增加10 km/h的速度行駛。
2.7 盲區(qū)監(jiān)測(cè)系統(tǒng)測(cè)試場(chǎng)景
盲區(qū)監(jiān)測(cè)系統(tǒng)測(cè)試場(chǎng)景分為盲區(qū)監(jiān)測(cè)車對(duì)車場(chǎng)景和盲區(qū)監(jiān)測(cè)車對(duì)二輪車場(chǎng)景,屬于可選審核項(xiàng)目。其中盲區(qū)監(jiān)測(cè)車對(duì)車場(chǎng)景包含目標(biāo)車輛超越試驗(yàn)車輛測(cè)試場(chǎng)景和目標(biāo)車輛并道測(cè)試場(chǎng)景,試驗(yàn)車輛的速度為50 km/h,目標(biāo)車輛在超車場(chǎng)景下分為60、65、70 km/h,目標(biāo)車輛在并道場(chǎng)景下速度為50 km/h。盲區(qū)監(jiān)測(cè)車對(duì)二輪車場(chǎng)景包含二輪車超越試驗(yàn)車輛測(cè)試場(chǎng)景和二輪車并道測(cè)試場(chǎng)景:在超車場(chǎng)景下,試驗(yàn)車輛的速度為40 km/h,二輪車速度為50 km/h;在并道場(chǎng)景下,試驗(yàn)車輛和二輪車的速度均為50 km/h。
3 主動(dòng)安全測(cè)試系統(tǒng)構(gòu)成
3.1 系統(tǒng)組成結(jié)構(gòu)
主動(dòng)安全測(cè)試系統(tǒng)主要包括試驗(yàn)設(shè)備、試驗(yàn)設(shè)備接入層、基礎(chǔ)程序、主控層、系統(tǒng)支撐層。
試驗(yàn)設(shè)備主要包括可導(dǎo)航移動(dòng)底盤車、駕駛機(jī)器人及試驗(yàn)車輛,屬于主動(dòng)安全測(cè)試試驗(yàn)硬件部分,同時(shí)也是主動(dòng)安全測(cè)試系統(tǒng)控制的硬件系統(tǒng)。
試驗(yàn)設(shè)備接入層主要用于實(shí)現(xiàn)將試驗(yàn)設(shè)備硬件系統(tǒng)接入測(cè)試系統(tǒng)環(huán)境中,主要采用數(shù)據(jù)交換的通信單元,由無線通信模塊和信號(hào)連接設(shè)備組成。
基礎(chǔ)程序用于控制硬件設(shè)備的基礎(chǔ)動(dòng)作,通過接收來自主控層的信號(hào)指令完成對(duì)硬件系統(tǒng)的實(shí)時(shí)運(yùn)動(dòng)控制及系統(tǒng)參數(shù)配置。
主控層主要功能目標(biāo)為進(jìn)行系統(tǒng)初始化控制、主動(dòng)安全測(cè)試場(chǎng)景設(shè)置、對(duì)測(cè)試參數(shù)精度進(jìn)行實(shí)時(shí)校核、關(guān)鍵試驗(yàn)數(shù)據(jù)實(shí)時(shí)顯示、測(cè)試控制、標(biāo)準(zhǔn)報(bào)告輸出等功能,其實(shí)現(xiàn)基礎(chǔ)為通過網(wǎng)絡(luò)通信協(xié)議與基礎(chǔ)程序進(jìn)行數(shù)據(jù)交互控制。
系統(tǒng)支撐層的主要功能目標(biāo)為主動(dòng)安全測(cè)試場(chǎng)景模板處理、主動(dòng)安全測(cè)試報(bào)告的查詢及試驗(yàn)測(cè)試記錄的查詢。
3.2 軟件組成結(jié)構(gòu)
主動(dòng)安全測(cè)試系統(tǒng)軟件的組成結(jié)構(gòu)包括4 個(gè)部分:系統(tǒng)基礎(chǔ)層、系統(tǒng)數(shù)據(jù)層、測(cè)試支撐層及測(cè)試應(yīng)用層。
系統(tǒng)基礎(chǔ)層包括硬件系統(tǒng)平臺(tái)和軟件系統(tǒng)平臺(tái),其中,硬件系統(tǒng)平臺(tái)分為高性能工控機(jī)及交換機(jī),軟件系統(tǒng)平臺(tái)分為 Windows 系統(tǒng)等。
系統(tǒng)數(shù)據(jù)層包括主動(dòng)安全測(cè)試場(chǎng)景庫、試驗(yàn)檢測(cè)報(bào)告庫及試驗(yàn)測(cè)試記錄數(shù)據(jù)庫,該層數(shù)據(jù)庫可根據(jù)后續(xù)檢測(cè)需求進(jìn)一步擴(kuò)充。
測(cè)試支撐層主要由構(gòu)成各類測(cè)試需求的功能組件組成,包括顯示類組件及通信協(xié)議類組件。顯示類組件分為地圖顯示、測(cè)試狀態(tài)顯示、實(shí)時(shí)校核狀態(tài)顯示。通信協(xié)議類組件分為數(shù)據(jù)接收、協(xié)議解碼、數(shù)據(jù)發(fā)送及協(xié)議編碼等。
測(cè)試應(yīng)用層主要由主控軟件、基礎(chǔ)程序、數(shù)據(jù)庫管理 3 部分組成。主控軟件分為初始化設(shè)置、測(cè)試場(chǎng)景編輯、實(shí)時(shí)校核、生成報(bào)告、測(cè)試試驗(yàn)控制、手動(dòng)控制及測(cè)試記錄等。基礎(chǔ)程序分為可導(dǎo)航移動(dòng)底盤車基礎(chǔ)控制及駕駛機(jī)器人基礎(chǔ)控制。數(shù)據(jù)庫管理分為測(cè)試場(chǎng)景設(shè)置、檢測(cè)報(bào)告生成設(shè)置及試驗(yàn)測(cè)試記錄設(shè)置。
3.3 硬件組成結(jié)構(gòu)
硬件組成結(jié)構(gòu)主要包括操作控制層和數(shù)據(jù)連接層。操作控制層分為高性能工控機(jī)和磁盤陣列,高性能工控機(jī)主要用于提供對(duì)系統(tǒng)進(jìn)行控制的人機(jī)交互界面,磁盤陣列主要用于存儲(chǔ)測(cè)試場(chǎng)景模塊、報(bào)告數(shù)據(jù)庫及試驗(yàn)記錄等數(shù)據(jù)。數(shù)據(jù)連接層由一臺(tái)交換機(jī)和多臺(tái)通信設(shè)備組成,用于實(shí)現(xiàn)對(duì)整個(gè)系統(tǒng)進(jìn)行數(shù)據(jù)交互和提供相應(yīng)網(wǎng)絡(luò)支撐。
4 結(jié) 論
本文主要對(duì)主動(dòng)安全測(cè)試系統(tǒng)的研究現(xiàn)狀、基于 C-NCAP 規(guī)程的主動(dòng)安全測(cè)試場(chǎng)景及主動(dòng)安全測(cè)試系統(tǒng)進(jìn)行了詳細(xì)的闡述,分析了主動(dòng)安全測(cè)試的7 個(gè)測(cè)試場(chǎng)景及測(cè)試系統(tǒng)的組成結(jié)構(gòu)、軟件組成結(jié)構(gòu)及硬件組成結(jié)構(gòu),對(duì)主動(dòng)安全測(cè)試系統(tǒng)的開發(fā)具有一定的指導(dǎo)意義。
主動(dòng)安全測(cè)試技術(shù)受到越來越多研發(fā)機(jī)構(gòu)及研究人員的重視,開發(fā)符合國內(nèi)標(biāo)準(zhǔn)及規(guī)程的定制化測(cè)試設(shè)備成為了一種新的方向。通過對(duì)基于C-NCAP的主動(dòng)安全測(cè)試系統(tǒng)的研究,有助于國內(nèi)主動(dòng)安全測(cè)試系統(tǒng)的完善與優(yōu)化。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32