基于滑輪組和永磁彈簧的變剛度關節(jié)設計與控制
2023-03-07 07:21:34馬鵬菲孫興偉徐方超房立金
農業(yè)機械學報 2023年1期
張 明 馬鵬菲 孫 鳳 孫興偉 徐方超 房立金
(1.沈陽工業(yè)大學機械工程學院, 沈陽 110870; 2.東北大學機器人科學與工程學院, 沈陽 110169)
0 引言
隨著機器人參與人類日常生活生產的增加,機器人的人機交互安全性和環(huán)境適應性問題越來越受到重視。相較于傳統(tǒng)的剛性機器人,變剛度機器人具有更好的環(huán)境適應性,并在人機交互中具備更好的安全性[1-3]。因此變剛度機器人一直被海內外學者所關注與研究。經過多年的探索,目前柔性變剛度機器人主要分為:具有柔性變剛度機械結構的機器人[4-5]和利用彈性材料產生剛度變化的機器人[6-7]。其中采用機械結構實現(xiàn)機器人剛度變化的變剛度方式,使用最為廣泛。例如AWAS(Actuator with adjustable stiffness)系列[8-9],CompAct-variable stiffness actuator (CompAct-VSA)[10]、Hybrid variable stiffness actuator (HVSA)[11]、Variable stiffness joint (VSJ)[12]、Active variable stiffness elastic actuator(AVSEA)[13]等結構通過改變杠桿支點與輸出末端之間彈簧的距離實現(xiàn)變剛度。Mechanically adjustable compliance and controllable equilibrium position actuator(MACCEPA2.0)[14-15]、Parallel-type variable stiffness actuator (PSVA)[16]等結構則應用特殊曲面實現(xiàn)剛度的變化。OSADA等[17]設計的人型機器人“Kojiro”中為其關節(jié)處加入了柔性變剛度模塊,首次提出了線繩驅動變剛度模塊被世界廣泛認可,在變剛度關節(jié)研究中開辟了一個新的方向。文獻[18]以非線性彈性元件(Nonlinear spring tension unit,NST)為基礎,進一步的研究設計出了FAS(Flexible antagonistic spring)結構,其原理是使定滑輪位置可以發(fā)生變化,使原有的固定三角形結構隨著拉力的變化而改變,從而實現(xiàn)更強的剛度變化。YONG-JAE等[19-21]基于NST線繩驅動的理念設計了LIMS(Low inertia manipulator with high stiffness and strength)系列7自由度機械臂,并在關節(jié)部分運用滑輪組結構,實現(xiàn)了輸出倍數(shù)增長的效果和手腕處大范圍轉動。由于目前存在的機器人關節(jié)仍無法實現(xiàn)同時滿足剛度變化范圍、關節(jié)轉矩和轉動范圍3種參數(shù)的最優(yōu)化設計,為了進一步提高關節(jié)性能,需要不斷對關節(jié)進行優(yōu)化設計。
為了使變剛度機器人肘關節(jié)具有更接近人體肘關節(jié)的運動范圍,同時具有更優(yōu)良的剛度變化能力,本文設計一種基于永磁彈簧、滑輪組和類行星輪系結構的線繩驅動的變剛度機器人肘關節(jié),闡述機器人變剛度肘關節(jié)的實現(xiàn)原理和機械構成。建立變剛度肘關節(jié)的剛度模型,以解決并聯(lián)式繩驅變剛度肘關節(jié)的位置與剛度耦合的問題。以變剛度關節(jié)的動力學模型為基礎,設計變剛度肘關節(jié)的剛度與位置的解耦控制器,并進行解耦驗證和位置控制實驗等,以驗證變剛度機器人肘關節(jié)設計合理性和方案可行性。
1 變剛度肘關節(jié)原理分析
1.1 磁彈簧變剛度原理
圖1為磁彈簧變剛度模塊內部結構。通過將兩塊參數(shù)相同磁極相對的永磁環(huán)同軸心布置在變剛度模塊的支撐結構和滑動導柱上,并在兩個結構上分別設置定滑輪,當依次穿過其中的線繩受力變化時,線繩拉動滑動導柱使兩永磁環(huán)之間的氣隙Z不斷減小。當兩個永磁環(huán)逐漸靠近時,由于氣隙變化產生的斥力F呈非線性變化來對抗線繩的拉力。動滑輪、定滑輪和繞在期間的線索呈等腰三角形布置,線繩長度變化量Δl隨著氣隙Z減小呈非線性關系增加。線繩上的拉力T隨著氣隙變化呈更強的非線性關系變化。因此在不改變線繩拉力的情況下,增加了線繩剛度變化范圍。根據(jù)剛度公式并結合虛位移原理,變剛度模塊的非線性剛度變化關系為
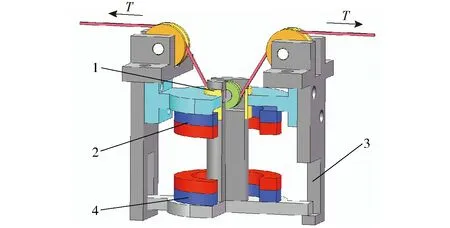
圖1 磁彈簧變剛度模塊Fig.1 Variable stiffness module of magnetic spring1.直線軸承 2、4.釹鐵硼永磁環(huán) 3.滑動導向槽
(1)
式中k——剛度
1.2 動滑輪組原理
根據(jù)動滑輪力學特性,在肘關節(jié)內部(圖2),將動滑輪組對稱布置在轉動盤兩側。滑輪組中一端固定在大臂定轉動盤上,另一端固定在小臂動轉動盤處,并隨小臂轉動。動轉動盤和連接在其幾何中心的支撐架,形成類似于行星輪和行星架結構。當其中一組動滑輪組受到拉力Tj時(j=1,2),可以推導求得滑輪組對小臂轉動盤的拉力為
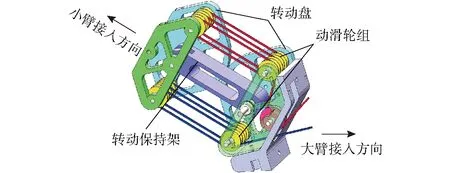
圖2 肘關節(jié)內部繞線結構Fig.2 Internal wires structure of elbow joint
τ′=nηTj
(2)
式中η——線繩拉力方向矢量
n——滑輪組中線繩纏繞圈數(shù)
τ′——小臂轉動盤拉力
因此電機對小臂的驅動力矩被放大n倍。
2 變剛度肘關節(jié)樣機實現(xiàn)
基于以上兩種原理設計了變剛度機器人肘關節(jié)結構三維模型,如圖3所示。兩套線繩驅動系統(tǒng)對稱布置,線繩的一端固定在動滑輪上,依次穿過變剛度模塊、線索導向結構,另一端固定在與電機固連的線繩絞盤上。整體肘關節(jié)通過控制兩臺電機的轉動角,帶動兩根線繩實現(xiàn)收緊與放松過程,分別完成變剛度模塊中磁環(huán)間隙減小和帶動兩片轉動盤完成相對類嚙合轉動,實現(xiàn)對肘關節(jié)的位置和剛度控制。其中在關節(jié)的狀態(tài)參數(shù)發(fā)生改變時,關節(jié)轉動將會引起線繩長度變化,但磁彈簧變剛度并不會受關節(jié)轉動而發(fā)生改變。兩組滑輪組結構以圓心點O0和O1對稱布置,形成和人體手臂肌肉相似的拮抗式結構。如圖4所示,根據(jù)以上設計思想加工了變剛度關節(jié)樣機。整體結構中使用線繩傳動可以使電機后置,同時各零部件在設計中應用輕量化設計理念,有效減小了小臂質量。此種布置方式可以應用到多自由度復雜操作臂中,通過線繩驅動多級關節(jié)可以減小關節(jié)對電機性能的需求。在變剛度關節(jié)中,線繩轉向的部分均使用滑輪作為導向,并在線繩轉向處,滑輪均為中線相切布置,保證線繩傳遞的穩(wěn)定準確。檢測關節(jié)轉角的編碼器與轉動保持架同步轉動,實時檢測關節(jié)轉角,并推算出對應肘關節(jié)的實際運動位置。
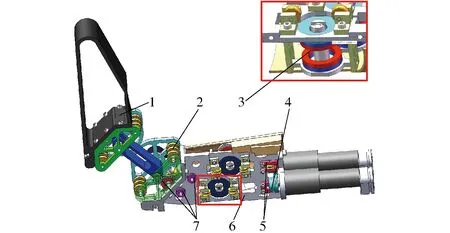
圖3 肘關節(jié)三維模型內部結構圖Fig.3 Internal three-dimensional structure of elbow joint1.小臂 2.動滑輪組 3.磁彈簧變剛度模塊 4.線繩絞盤 5.傳動支架 6.大臂 7.線繩導向機構
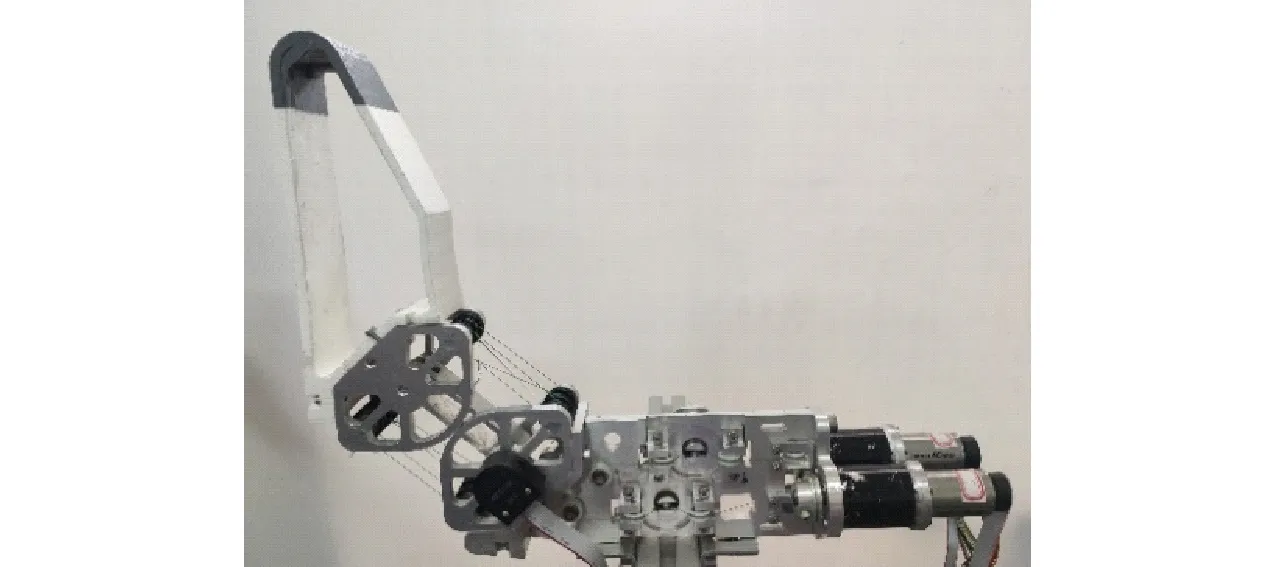
圖4 肘關節(jié)樣機Fig.4 Elbow joint prototype
3 肘關節(jié)剛度模型建立
根據(jù)關節(jié)結構設計布置可知,變剛度關節(jié)只在二維平面內運動,因此在平面內建立變剛度肘關節(jié)的坐標系如圖5所示。基坐標系O0{x0,y0}位于固定轉動盤的圓心處,動坐標系O2{x2,y2}位于與固定轉動盤嚙合的動轉動盤的圓心處,且y2與小臂軸向方向同向。動坐標系O1{x1,y1}位于類行星架的末端,且y1與行星架的軸向方向同向,類行星架長度是固定轉動盤圓心到動轉動盤中心的距離。行星架隨著動轉動盤的嚙合旋轉而轉動。由于兩片轉動盤半徑相等,因此小臂旋轉角度θ是類行星輪系結構轉動角γ的2倍,即θ=2γ。
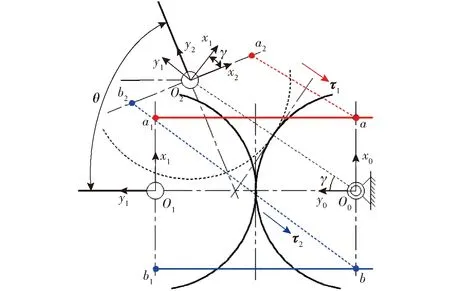
圖5 肘關節(jié)二維平面簡圖Fig.5 Two-dimensional plan of elbow joint
通過對肘關節(jié)進行靜力學特性分析可以降低后續(xù)計算的復雜性,由于兩片轉動盤可以形成類嚙合轉動,所以兩片轉動盤的轉動接觸點始終在O0O2連線上。對轉動盤接觸點,通過取矩可得關節(jié)在轉動范圍內任意位置時靜力力學等式為
τ1r1+τ2r2-Grg=0
(3)
式中τ1——紅色純繩拉力G——小臂重力
τ2——藍色線繩拉力
rg——小臂重力瞬時力臂
r1——紅色線繩瞬時力臂
r2——藍色線繩瞬時力臂
根據(jù)轉動結構設計,在關節(jié)靜力學簡化模型中,變剛度肘關節(jié)的兩片轉動盤轉動接觸點O1始終在類行星輪系的圓心線O0O2上,使關節(jié)呈類嚙合方式轉動。對點O1取矩,根據(jù)肘關節(jié)內部結構,結合靜力學平衡方程推導得到2條線繩作用力與小臂重力之間的關系式為
(4)
式中D——類行星輪系中圓心線O0O1距離
w——肘關節(jié)內部對稱布置的兩滑輪組之間的距離
聯(lián)立式(3)、(4)可得肘關節(jié)運動方程為
(5)
式中J1——關節(jié)轉動慣量
Bi——系統(tǒng)阻尼
變剛度肘關節(jié)中,驅動電機作為驅動輸入單元,通過控制線繩變化實現(xiàn)各模塊工作,由于變剛度肘關節(jié)中各傳動部位均設置導向傳動結構,所以線繩驅動系統(tǒng)中各模塊線繩上的拉力近似相等。由此可將輸入肘關節(jié)內部的線繩拉力近似看作磁彈簧變剛度模塊中線繩的輸出拉力,結合動滑輪的力學特性得到肘關節(jié)滑輪組對小臂作用的線繩拉力的近似表達式為
(6)
結合虛位移原理,當假設給定一個極小的輸入轉矩,變剛度肘關節(jié)小臂輸出端將會產生一個極小的轉動角,此時關節(jié)力學表達式為
(7)
通過式(7)的變形推導,可以得到變剛度肘關節(jié)的剛度矩陣Kθ。根據(jù)虛功原理得到
(8)
在肘關節(jié)中,通過控制線繩長度實現(xiàn)關節(jié)位置與剛度控制,將磁彈簧變剛度模塊中線繩拉力Tj與轉動角θ之間的關系變換為拉力Tj與線繩長度之間的關系
(9)
式中kj——變剛度模塊剛度
lj——線繩驅動磁彈簧模塊中線繩長度
ηj——線繩拉力方向矢量
將式(8)、(9)代入式(7)整理可得
(10)
式中 Δl1、Δl2——變剛度模塊剛度變化引起的線繩長度變化量
為了實現(xiàn)肘關節(jié)位置-剛度的解耦控制,需要對關節(jié)轉動而引起的線繩變化量Δlj進行分析求解。如圖5所示,肘關節(jié)在初始平衡位置時,兩條線繩的長度L0等于兩轉動盤圓心距,且兩套滑輪組中滑輪圓心連線均平行于轉動盤圓心線。在肘關節(jié)轉動過程中,根據(jù)不同的轉動方向,兩根線繩分別進行張緊和收縮變化。從坐標系{O1}變換到坐標系{O2}時,點a1、b1相對坐標原點轉動相同的角度運動到點a2、b2處,兩根線繩長度變化量始終相同。推導線繩長度變化量與肘關節(jié)轉動角之間的函數(shù)關系為
ΔL=|Lj-L0|=nwsinγ
(11)
式中Lj——肘關節(jié)轉動到平衡位置之后的線繩長度
實際的關節(jié)樣機在安裝滑輪組時,線繩在肘關節(jié)中的纏繞方式分為水平纏繞和斜向纏繞兩種,則式(11)可以變換為
(12)
式中λ——斜向纏繞線繩數(shù)量
Lδ——O0O2圓心距
Lε——同一滑輪組中相鄰兩滑輪的間距
分析在不同剛度條件下,肘關節(jié)轉動任意角度所引起的兩根線繩長度變化。聯(lián)立式(10)和式(12)可以實現(xiàn)變剛度肘關節(jié)位置和剛度的獨立控制。
通過對關節(jié)位置與線繩長度的對應關系求導可以得到線繩速度與關節(jié)速度的對應關系為
(13)
其中
(14)
式中J——機器人雅可比矩陣
根據(jù)關節(jié)轉動角和磁彈簧變剛度模塊可得整體肘關節(jié)的剛度模型為
(15)
為了得到變剛度關節(jié)的剛度變化規(guī)律,對式(15)進行理論計算分析。當線繩伸長量從 0 mm 變化到18.16 mm,即永磁彈簧剛度從 1.51 N/mm 變化到無窮大。根據(jù)式(1)理論上肘關節(jié)剛度變化范圍從13.25 N·m/rad變化到無窮大。根據(jù)結構的布置設計,變剛度關節(jié)理論有效轉動范圍可以從-90°運動到90°。以關節(jié)線繩長度變化量16 mm條件下為例,如圖6所示,關節(jié)位于不同位置時,關節(jié)剛度隨著永磁彈簧剛度的增加呈非線性規(guī)律增加。關節(jié)剛度隨著關節(jié)位置變化呈拋物線規(guī)律增加,且隨著永磁彈簧剛度的增加,關節(jié)剛度隨關節(jié)位置變化曲線陡峭程度增加。關節(jié)位于對稱中心位置附近時可以實現(xiàn)剛度的調整范圍最大,隨著關節(jié)位置趨近兩側極限位置,關節(jié)剛度變化范圍在減小。當前條件下,如圖6a所示,磁彈簧變剛度模塊的剛度變化范圍為1.51~78.22 N/mm,如圖6b所示肘關節(jié)剛度范圍為13.25~6 210.9 N·m/rad。
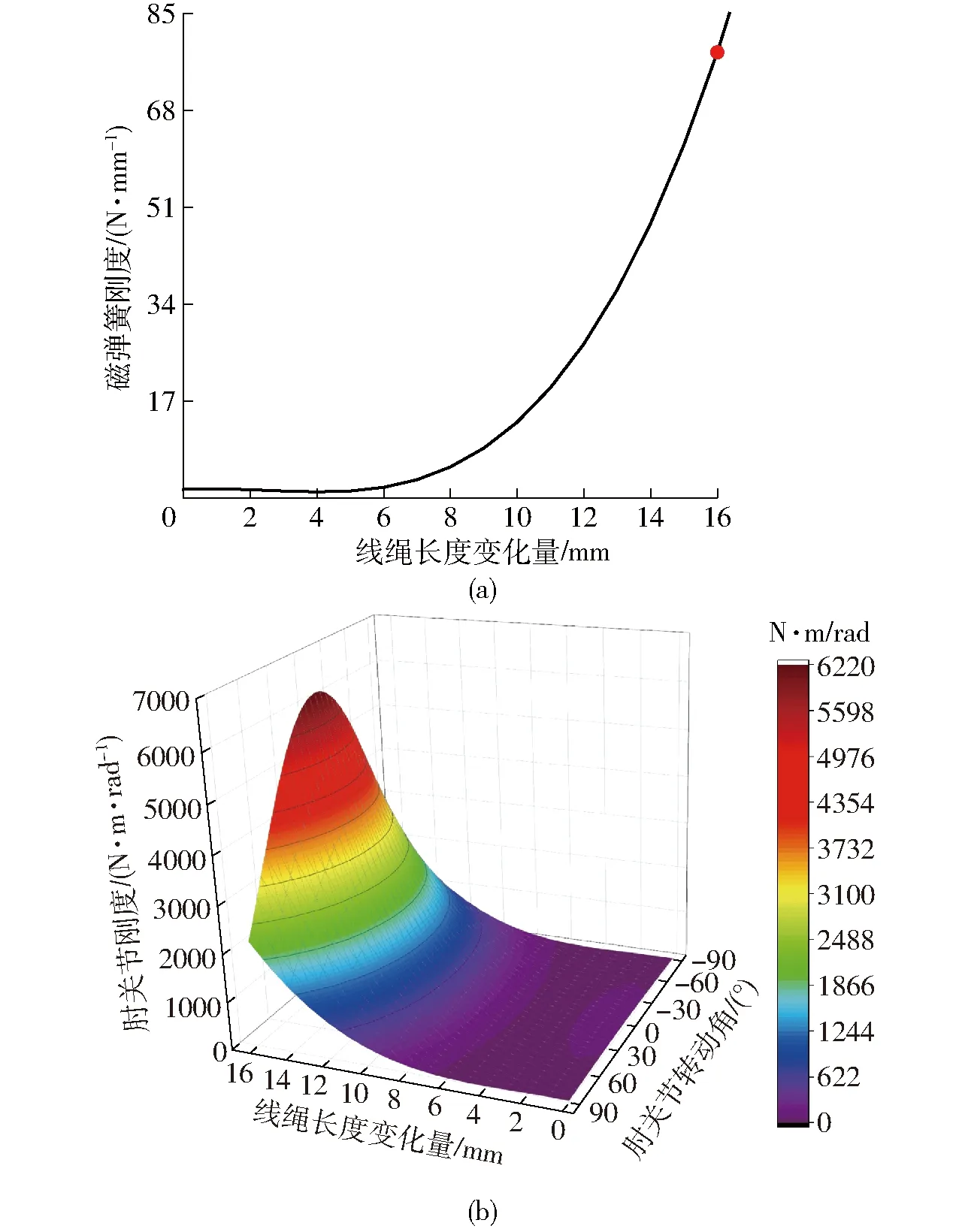
圖6 剛度模型仿真計算結果Fig.6 Simulation and calculation of stiffness models
4 關節(jié)動力學分析與控制器建立
4.1 動力學建模
為了實現(xiàn)變剛度肘關節(jié)剛度和位置的解耦控制,對關節(jié)進行了動力學建模。假定不考慮線繩自身彈性形變,通過在二維平面內建立關節(jié)簡化模型,根據(jù)式(5)、(6),結合拉格朗日平衡等式建立整體關節(jié)動力學模型為
(16)
式中JM——電機慣性矩陣
R——電機上絞盤半徑
ζj——線繩拉力方向矢量
TM——電機驅動力矩
η′——線繩拉力提升系數(shù)
JT——小臂輸出轉動慣量
4.2 控制器設計
根據(jù)變剛度肘關節(jié)的驅動原理,當線繩驅動整體關節(jié)發(fā)生運轉時,關節(jié)會同時產生轉動角和剛度的變化,從而使關節(jié)的位置和剛度參數(shù)發(fā)生耦合。為了實現(xiàn)更好的關節(jié)控制效果,設計變剛度肘關節(jié)剛度位置解耦控制器。以變剛度肘關節(jié)的工作原理作為基礎,設計如圖7所示的開環(huán)控制器,將肘關節(jié)的期望剛度Kd與期望轉動位置θd作為控制器的輸入,剛度模型中應用牛頓迭代法對由關節(jié)剛度變化引起的線繩變化量Δlj進行求解,根據(jù)式(12)得到關節(jié)由于位置變化產生的線繩變化量ΔLj,進行疊加后輸入電機絞盤。則可以得到輸入電機轉角分別為
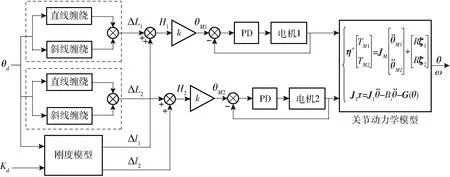
圖7 肘關節(jié)解耦控制流程圖Fig.7 Elbow decoupling control flow chart
(17)
式中Hj——線繩驅動系統(tǒng)中輸入電機絞盤的總線繩長度變化量
經過計算得到相對應的線繩變化量,進行疊加得到總變化繩長Hj并通過線索絞盤轉換成電機轉角θMj,輸入PD控制器調節(jié)電機Mj轉動角,并將調節(jié)結果負反饋與初始值對比形成閉環(huán)控制系統(tǒng)。將得到的電機轉角輸入肘關節(jié)動力學模型,實現(xiàn)通過雙線繩驅動系統(tǒng)實現(xiàn)關節(jié)的位置與剛度的解耦控制,從而得到關節(jié)轉動角θ和轉動角速度ω作為輸出。
5 變剛度肘關節(jié)實驗
磁彈簧變剛度模塊中永磁環(huán)的主要參數(shù)如表1所示,肘關節(jié)結構中主要參數(shù)如表2所示。為了方便后續(xù)計算,對仿真得到的數(shù)據(jù)進行曲線擬合。仿真得到的擬合函數(shù)關系式為
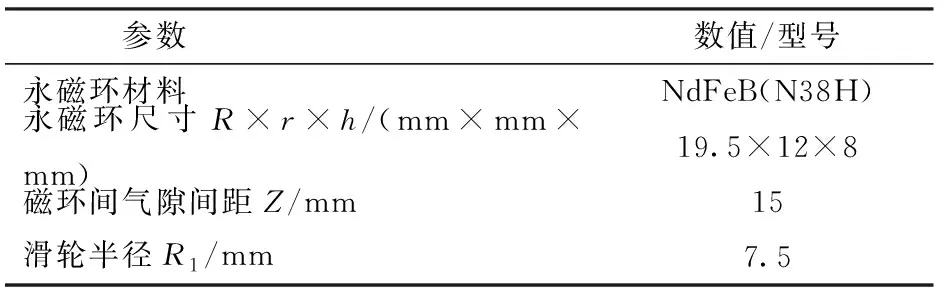
表1 永磁環(huán)參數(shù)Tab.1 Parameters of permanent magnetic rings
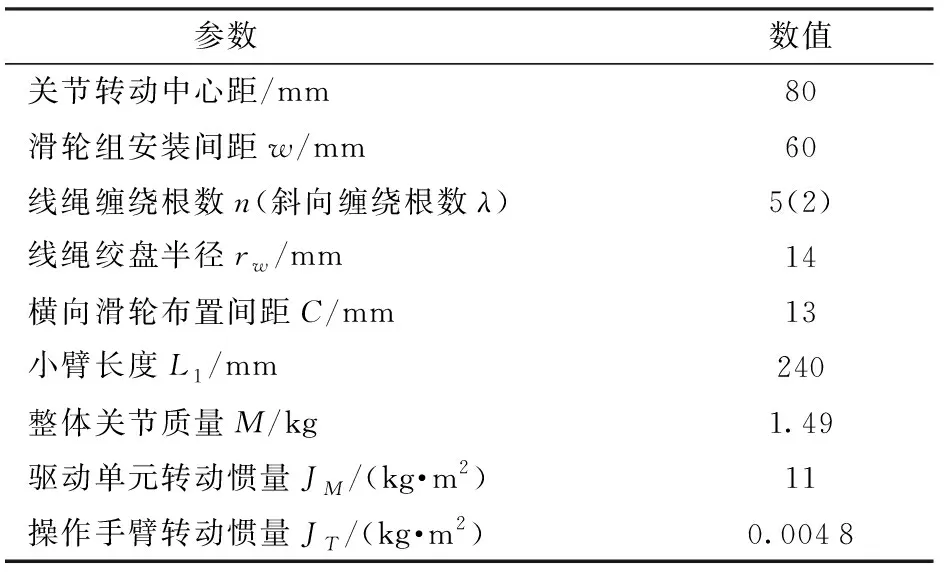
表2 關節(jié)主要參數(shù)Tab.2 Main parameters of joint
τ=0.008 0Δl4-0.078 61Δl3+
0.157 32Δl2+1.51Δl+4.833 4 (18)
實驗臺搭建如圖8所示,通過在上位機中應用Matlab/Simulink軟件編譯搭建的控制框圖。在控制器DSpace1103中,分別將控制輸入信號轉換為電壓信號,然后分別輸入到兩個驅動器ESCON70/10中,隨后轉換為電流信號控制伺服電機轉動。在關節(jié)內部設置的編碼器和驅動電機的編碼器返回檢測信號,可以實時檢測關節(jié)和電機的實際轉動角。
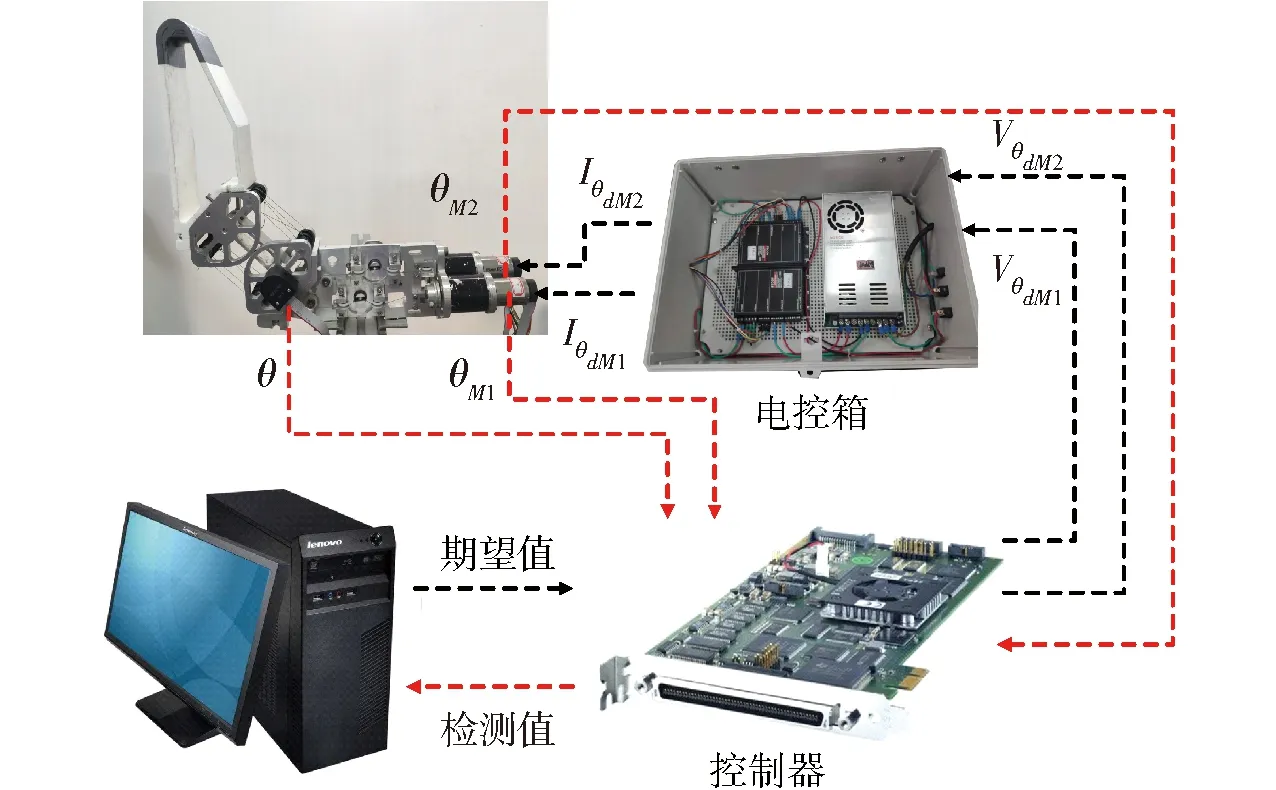
圖8 肘關節(jié)實驗平臺示意圖Fig.8 Schematic of elbow experiment platform
對比實驗測試數(shù)據(jù)與現(xiàn)有的關節(jié)設計,如表3所示。相比于VSJPMM結構和LIMS結構,本文設計的肘關節(jié)可以同時具備轉動范圍大、剛度變化范圍大的優(yōu)點。并在此前提下,整體手臂質量減輕40%左右。
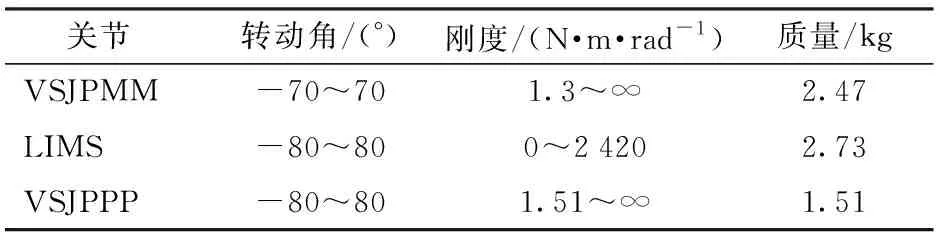
表3 肘關節(jié)性能參數(shù)Tab.3 Elbow joint performance parameters
5.1 關節(jié)解耦階躍響應特性實驗
變剛度肘關節(jié)位置和剛度解耦控制驗證實驗中,在肘關節(jié)輸出小臂末端放置0.3 kg的負載以檢測關節(jié)在不同狀態(tài)條件下靜剛度,對測量數(shù)據(jù)求取平均值并于期望關節(jié)剛度條件進行對比驗證,檢測靜剛度與期望剛度誤差在4%以內。首先將關節(jié)放置于初始位置,在解耦實驗中對肘關節(jié)分別輸入剛度階躍信號與轉動角階躍信號,信號輸入順序為:剛度K1=50 N·m/rad,關節(jié)平穩(wěn)后,在此剛度條件下輸入期望轉動角Δθ1=15°。待關節(jié)運動到-15°后,輸入期望剛度K2=100 N·m/rad,并在此剛度條件下輸入期望轉動角Δθ2=15°。通過關節(jié)轉角編碼器與電機上的編碼器返回檢測值,如圖9所示。 圖9a 為轉角編碼器測量變剛度肘關節(jié)在輸入不同信號條件下關節(jié)的位置軌跡。圖9b為兩臺驅動電機的編碼器在不同條件下輸入階躍信號后產生電機轉動時所得到檢測值。由于關節(jié)結構的設計,兩臺電機由于剛度引起轉動時轉動方向相同,且在關節(jié)中對稱布置的磁彈簧變剛度模塊同時進行剛度調整且剛度變化引起的線繩變化量基本相同,使關節(jié)所處的位置理論上不會發(fā)生變化。在不同剛度條件下時,關節(jié)響應特性也隨剛度的增大有所提升,關節(jié)轉動均可達到近似期望位置,肘關節(jié)的運動誤差均在2.3%以內。當肘關節(jié)在剛度K2=100 N·m/rad條件下,關節(jié)運動的超調量相對更小,且關節(jié)運動達到平穩(wěn)性的時間也更短,約為0.29 s。
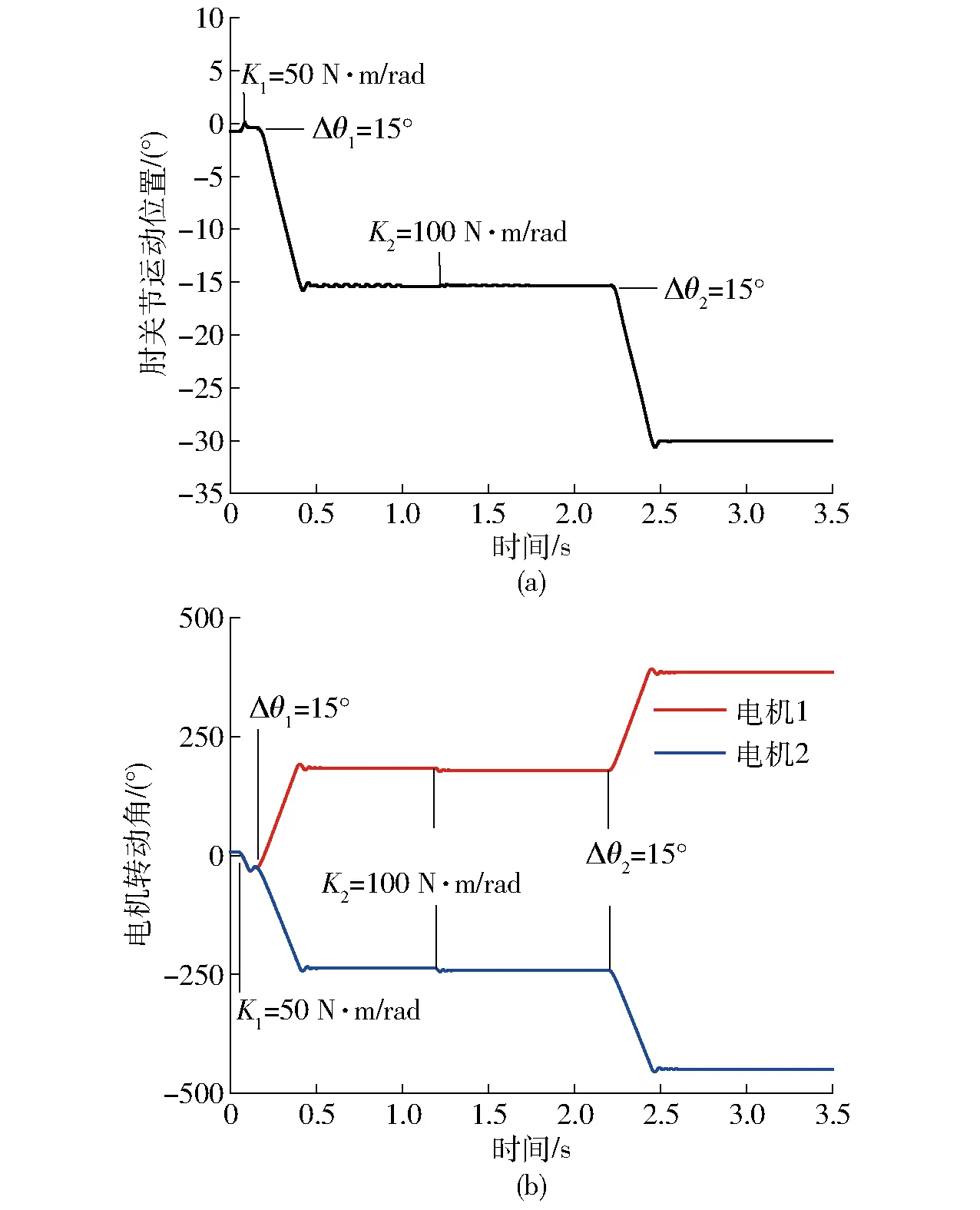
圖9 關節(jié)剛度位置解耦實驗結果Fig.9 Joint stiffness position decoupling experiment
5.2 軌跡跟隨實驗
關節(jié)水平放置于初始位置,對關節(jié)輸入連續(xù)正弦信號,振幅從-20°變化到20°,運動周期為6.3 s,小臂輸出端長度為240 mm。通過兩臺電機聯(lián)動,使關節(jié)呈正弦連續(xù)性擺動。分別在剛度K3=30 N·m/rad和K4=100 N·m/rad條件下,對肘關節(jié)進行連續(xù)性關節(jié)軌跡實驗,如圖10所示。由圖10可知,在更大的剛度條件下變剛度肘關節(jié)運動時,關節(jié)運動位置相對于理想軌跡具有更好的運動跟隨效果,且誤差超調量也相對更小,說明剛度參數(shù)的設置對關節(jié)的連續(xù)性運動具有較為明顯的影響。但關節(jié)剛度增加后,肘關節(jié)會在極限位置存在運動軌跡的誤差,這是由于磁彈簧變剛度模塊的拮抗式設計,使肘關節(jié)運動中,磁彈簧變剛度模塊會抵抗線繩拉力的瞬時變化,導致關節(jié)在極限位置受到較大的阻抗力。
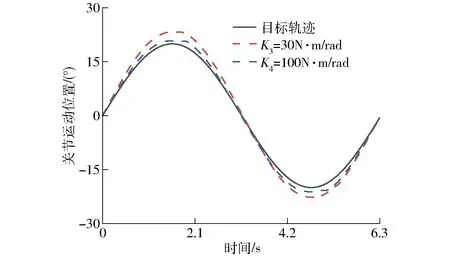
圖10 正弦軌跡跟蹤實驗結果Fig.10 Sinusoidal trajectory tracking experiment
6 結論
(1)基于永磁彈簧、滑輪組和類行星輪系結構,提出了一種新型變剛度機器人肘關節(jié)。描述了運動控制過程與解耦控制器設計,并建立了三維模型與實物物理樣機。
(2)利用模型間靜力學關系和雅可比矩陣得到肘關節(jié)的剛度模型,并得到關節(jié)剛度隨磁彈簧剛度和關節(jié)位置變化的規(guī)律。利用關節(jié)剛度模型和動力學關系,建立了變剛度關節(jié)解耦控制器,實現(xiàn)肘關節(jié)剛度和位置解耦控制。
(3)通過變剛度關節(jié)位置響應和軌跡實驗得到變剛度關節(jié)位置控制精度和響應速度隨著關節(jié)剛度的增加而增加的變化規(guī)律。
