基于ABAQUS的盤刷刷毛清掃性能分析
2023-03-02 01:58:32林煜
汽車實用技術 2023年4期
林 煜
(福建船政交通職業學院 汽車學院,福建 福州 350000)
清掃車在進行清掃作業時,盤刷刷毛作為與垃圾顆粒直接接觸的部分,其清掃的性能如何,能否成功掃動垃圾顆粒,與垃圾顆粒之間的接觸運動形式又是什么樣的,這是值得探索的。
為了對盤刷刷毛的清掃性能進行分析,文中采用有限元方法來探討刷毛對垃圾顆粒的作用情況,通過在ABAQUS軟件中建立盤刷刷毛與垃圾顆粒的模型,模擬其清掃接觸過程,從而得到刷毛與垃圾顆粒之間的運動受力情況,以此來說明刷毛對垃圾顆粒的清除效果。接著在不同觸地深度下進行清掃,分析觸地深度對于盤刷刷毛清掃性能的影響。
1 盤刷刷毛與顆粒的接觸形式
清掃車在工作過程中,盤刷作為主要的工作裝置之一,用來清掃清掃車兩側路面上的垃圾,而刷毛作為直接與垃圾顆粒接觸的物體,其清掃性能的好壞直接關系到盤刷以及整輛清掃車的作業性能[1]。盤刷在掃動時,其刷毛與垃圾顆粒之間接觸的形式一般分為兩種,切式清掃和彈式清掃,兩者的所受的作用力和發生的形變不同。
由于盤刷刷毛切式清掃與彈式清掃的特點不同,它們所適用的路況也就不同。在垃圾密度高的路面,應采用切式清掃;在垃圾密度較低的路面上,宜采用彈式清掃。本文所研究的清掃車一般常用在城市道路,主要清掃的對象為質量較輕的常見垃圾,因此,采用彈式清掃。
2 盤刷刷毛與顆粒的建模方法
刷毛與顆粒的接觸是非常復雜的非線性接觸問題,另外,垃圾顆粒與不同的路面之間的接觸情況也不同。在干燥路面,可采用庫倫摩擦定律進行計算;而當路面潮濕或者有泥土等復雜情況時,一般方法很難準確計算分析盤刷刷毛與路面及垃圾顆粒之間的受力和運動情況,因此,對模型的簡化提出四點假設:
(1)清掃車盤刷所清掃的路面是平坦整齊的平面;
(2)盤刷刷毛與地面垂直,且在垂直于地面的平面內發生形變[2];
(3)盤刷所清掃的垃圾顆粒具有一般的幾何外形;
(4)盤刷刷毛與垃圾顆粒,垃圾顆粒與地面均充分接觸且滿足基本物理理論。
在上述假設條件下,為了便于分析,本文把垃圾物體簡化成一個與地面充分接觸的不規則體。圖1為第j根刷毛與第i個垃圾顆粒接觸的受力分析圖。其中,1和2分別為顆粒與地面的接觸點;aj為接觸點3與點2之間的水平距離;hj為垃圾顆粒與刷毛的接觸點3到地面的高度;顆粒與地面之間的摩擦系數為μ。
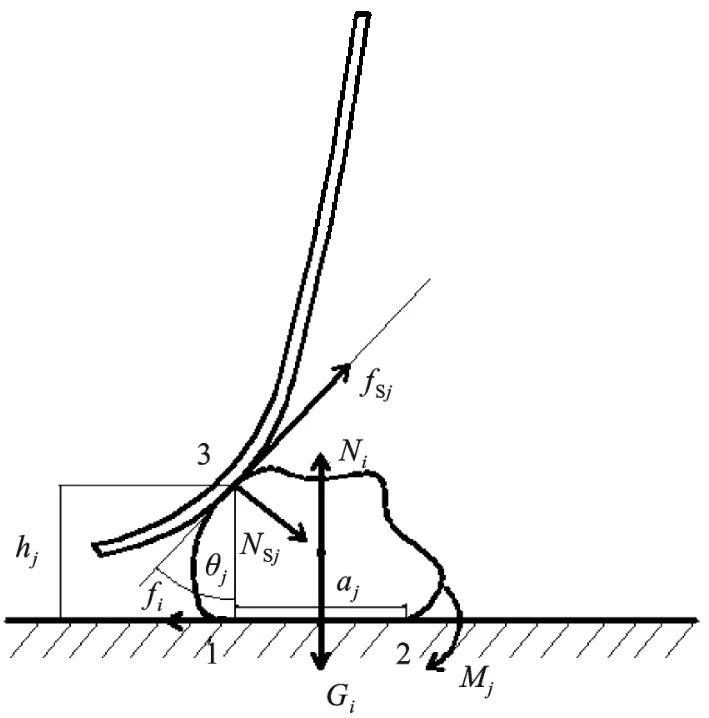
圖1 刷毛與垃圾顆粒接觸時的受力分析
當盤刷開始工作時,刷毛運動與垃圾顆粒形成接觸并發生形變,之后如圖所示與顆粒在點3處形成點接觸,垃圾顆粒受到變形刷毛給予的接觸壓力NSj和兩者間的摩擦力fSj,與此同時,垃圾顆粒也受到自身的重力Gi,地面給予的支持力Ni以及水平方向上的摩擦力fi,在外力的共同作用下,垃圾顆粒產生了一個繞著端點2的順時針轉矩Mj[3]。假設Fj為盤刷刷毛給予垃圾顆粒的清掃力,則通過受力分析可以得到
刷毛在水平方向上的清掃力為
刷毛在豎直方向上的清掃力為
式中,θj為刷毛與顆粒的接觸點3的刷毛切線方向與豎直方向之間的夾角。
垃圾顆粒繞著端點2的順時針轉矩為
通過上述分析可以看出,刷毛給予垃圾顆粒的水平方向和豎直方向上的清掃力以及垃圾顆粒所受到的外力引起的轉矩決定了刷毛能否成功掃動垃圾物。也就是盤刷能否完成有效清掃取決于水平清掃力FX和繞端點2的轉矩M。
根據受力情況,可以得出垃圾顆粒被成功清掃的臨界條件為[4-5]
式中,n為與垃圾顆粒i接觸的刷毛總數;xi為垃圾顆粒i的重心與2點之間的水平距離。只有在滿足上述條件之一,垃圾顆粒才能被成功清掃,視為有效清掃。
3 盤刷刷毛與顆粒ABAQUS分析
在滿足幾點假設的前提下,將盤刷刷毛與垃圾顆粒的接觸模型進行了簡化,由于盤刷刷毛對于垃圾物體的清掃過程中盤刷刷毛的變形情況無法獲得,而且在刷毛與垃圾顆粒的接觸過程中,刷毛垃圾顆粒的接觸點不斷改變,不同位置的邊界條件無法確定[4]。因此,為了更好地分析刷毛與顆粒的非線性接觸問題,文中采用了ABAQUS有限元方法。
盤刷刷毛與垃圾顆粒的接觸過程作為高度非線性問題,一方面刷毛與顆粒的接觸區域未知,接觸過程中位置形態不斷變化,而且受到多個因素的影響,比如:材料、載荷等等[5]。另一方面,刷毛與顆粒之間的接觸要考慮摩擦力的作用,而摩擦問題經常都是非線性無序的,很容易造成計算求解的不收斂,因此,創建合適的有限元模型是十分必要的,可以提高求解的效率。
為了更好地分析刷毛與顆粒的接觸過程,本章將分別建立兩個模型來模擬清掃過程,一個是盤刷刷毛不與地面接觸,直接在位移載荷的作用下,與顆粒發生相互作用,另一個將對刷毛先施加不同的觸地壓力,即不同的觸地深度,而后與顆粒接觸。
3.1 刷毛直接與顆粒接觸
在ABAQUS中建立盤刷刷毛與垃圾顆粒的簡化二維接觸模型,垃圾顆粒為不規則形體,故其重心的位置是無法確定的,為便于分析,將垃圾顆粒簡化為正方形作為垃圾顆粒仿真模型。定義刷毛的長度250 mm,半徑1 mm,設置與地面45°夾角,特征類型選擇wire,其余保持默認。垃圾顆粒為邊長30 mm正方形,類型為solid,在未接觸前與刷毛之間相隔5 mm。
表2 垃圾顆粒設置
在初始分析步中將垃圾顆粒與地面接觸的左右兩個端點1、2進行約束,令其U1=U2=UR3=0,即在X方向、Y方向的位移為0,以及在平面內不發生轉動。在刷毛的設置上,對其上端點進行約束,設置U2=UR3=0,即刷毛在Y方向上和平面內的轉動自由度都為0。
在step1中,在刷毛的上端點施加水平方向的位移載荷[6]。刷毛與垃圾接觸后,step1結束,進入step2,在該分析步中繼續施加水平方向上的載荷。隨著位移的增加,刷毛下端點與地面分離,直到與垃圾的4點接觸,此時step2結束,進入step3,在該分析步中仍舊施加水平向右的位移載荷,直到刷毛與垃圾上表面分離。
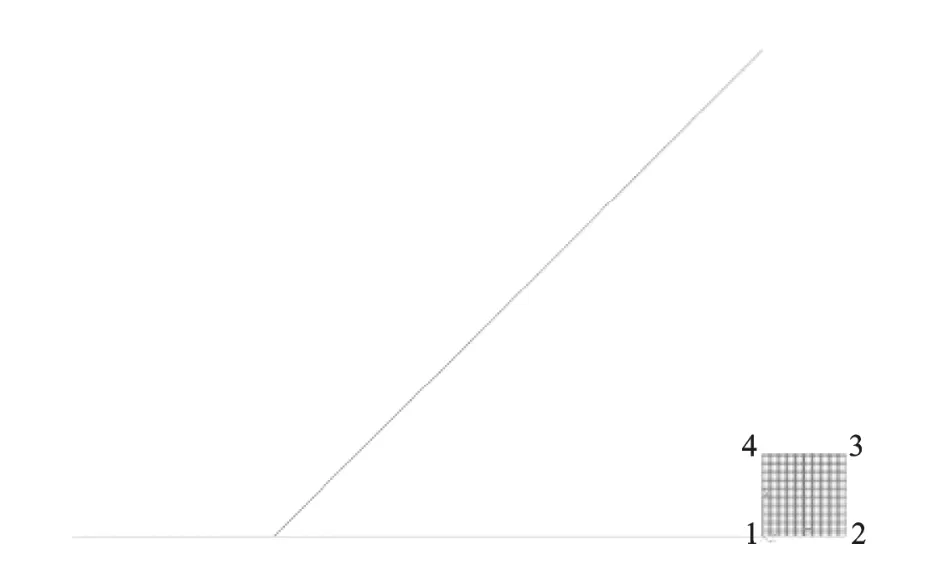
圖2 刷毛與垃圾顆粒及地面的模型
另外,設置刷毛下端點與地面、刷毛與垃圾顆粒左上端點4、刷毛下端點與顆粒上表面三處接觸類型皆為點面接觸。其中,刷毛沿著顆粒左上端點4運動時,刷毛位置不斷移動,但是與顆粒的接觸點保持不變,因此,可視為點面接觸,而刷毛與地面以及顆粒上表面的接觸位置始終為其下端點。這三處接觸的切向屬性均為penalty,切向摩擦系數分別設為0.5、0.2、0.2,而法向摩擦屬性設為hard,接觸面約束施加算法采用默認的default。
我說:“其實這也意味著你前期就已經做好了很多。”“也許是這樣,頂尖的定義很難說,但是至少從其他行業來看,可能拿到MS在葡萄酒行業是比較頂尖的。當你在某一個行業比較頂尖的時候,你有更多的機會去認識其他行業頂尖的人。至少是那個行業的人認可的,這對我來說是很有意義的事情。因為拋開葡萄酒不說,這讓你的眼界更寬廣一點,讓你想東西會更多一點,層次感會更強一點。這可能是拿到MS比較重要的一個變化。其實生活和工作沒有什么變化,忙會更忙。但工作還是那些工作,還是我非常重要的一部分。”
分別對刷毛、地面以及垃圾顆粒進行網格的劃分,建立的模型如圖3—圖4所示。
圖3 顆粒左右端點1、2水平方向上的受力情況
在模型中,刷毛在水平方向的位移載荷作用下向右運動。
在得到顆粒與地面接觸點的受力數據后,分別對顆粒與地面的左右接觸端點在水平方向和豎直方向上的受力進行曲線擬合,得到的結果如圖3和圖4所示。其中P1、P2分別代表點1、點2,RF1為水平方向的力,RF2為豎直方向的力。第一條豎直線段之前表示刷毛在地面運動,還未與垃圾顆粒發生接觸,兩條豎直線段之間的部分表示刷毛沿著顆粒的左上端點4進行移動,兩者有接觸,第二條豎直線段之后的部分表示刷毛離開顆粒左上端點,其下端點與顆粒的上表面形成接觸,直至刷毛與顆粒完全脫離,清掃過程結束。
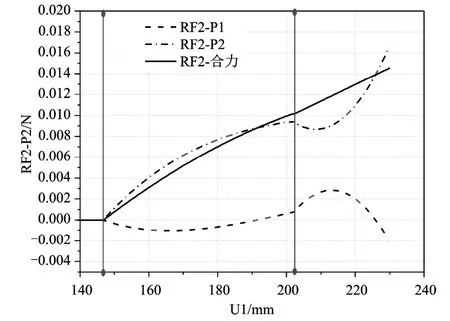
圖4 顆粒左右端點1、2豎直方向上的受力情況
觀察圖4可以看到,刷毛與垃圾顆粒左上端點4接觸的過程中,顆粒與地面接觸的端點1和2受到的地面給予的力為負值,即水平向左,反過來說,刷毛給予顆粒水平向右的一個清掃力,和運動方向同向。且隨著刷毛沿著顆粒左上端點不斷移動,1和2點所受的力以及它們的合力不斷變大,直到刷毛與左上端點即將分離時,達到最大值。在第二條豎直線段之后,即刷毛下端點與顆粒上表面接觸,隨著刷毛繼續移動,刷毛作用在顆粒上的水平合力不斷減小,在左端點1點上的分力在刷毛運動到顆粒上表面后半段時甚至改變了方向,阻礙顆粒被刷毛向前掃動,這是因為刷毛在顆粒上表面運動時,對顆粒有一定的壓力,在運動到后半段時,由于彈性形變,會對顆粒產生一個向后推動的趨勢,但總體來說,刷毛作用在顆粒的水平清掃力始終是正的。
圖4中的兩條豎直線段之間,地面給予顆粒的Y方向上的支持力越來越大,也就是說刷毛作用在顆粒上的壓力越來越大。在與地面接觸的左右端點1、2上,點1的支持力為負值(只有在刷毛即將與顆粒左上端點4脫離時才變為正值,因為此時刷毛即將與顆粒上表面接觸,對顆粒的左半部分壓力變大,導致顆粒有一個向后轉動的趨勢,阻礙顆粒向前的轉動),點2的支持力為正值,這樣一來,刷毛對顆粒就形成了一個順時針的轉矩,有利于刷毛掃動顆粒。在刷毛與顆粒上表面接觸的部分,刷毛作用在顆粒上的壓力繼續變大,點1受到的地面支持力在正方向上先變大,之后減小變為負值并增大,而點2受到的地面支持力為始終為正值,有一個先減小后變大的變化過程,這些都符合了刷毛在顆粒上表面從左端移動到右端所引起的變化規律,直至兩者脫離,清掃運動結束。
圖5為刷毛對顆粒進行清掃時對其產生的繞著右下端點2的轉矩,在刷毛與顆粒的左上端點4的接觸過程中,刷毛一直對顆粒形成一個順時針的轉矩,有利于刷毛掃動垃圾顆粒,直到刷毛即將與顆粒的左上端點脫離,這時轉矩變為逆時針,阻礙顆粒朝著清掃的方向轉動。在刷毛與顆粒上表面接觸中,逆轉矩先變大后變小,之后又變成順時針轉矩,因為刷毛從顆粒上表面左端一直移動到了右端,變化趨勢符合運動規律。
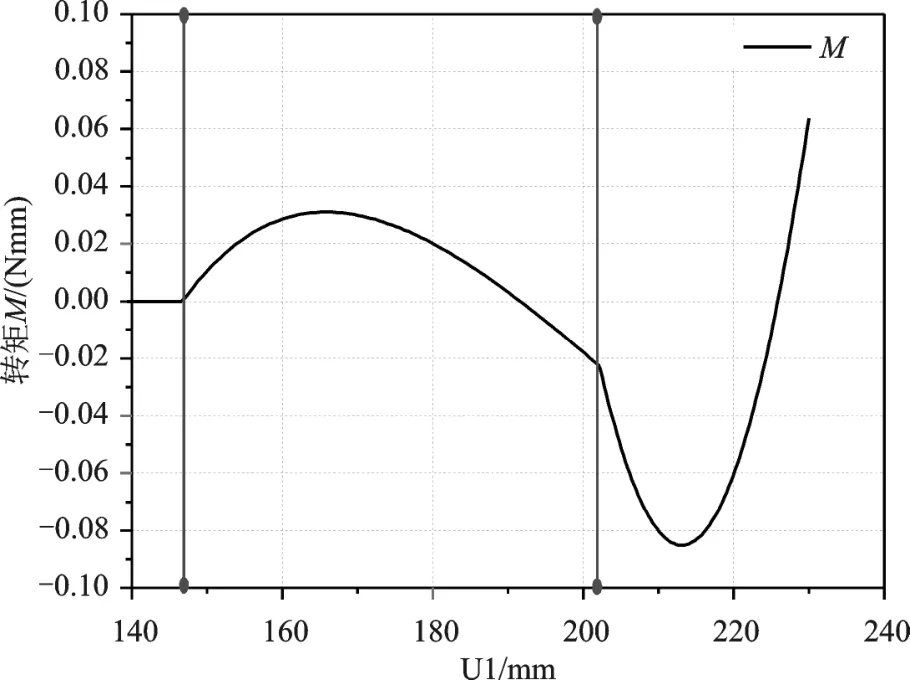
圖5 刷毛對垃圾顆粒的滾動轉矩
通過對比可以發現,單根刷毛對垃圾顆粒作用所產生的繞著左下端點2的轉矩遠小于顆粒自身重力在端點2的逆轉矩0.5amg,即不滿足顆粒在刷毛作用下發生轉動的臨界條件。所以,垃圾顆粒是否能夠被刷毛成功清掃,取決與刷毛的水平清掃力FX,只有顆粒在水平方向上受到的清掃力大于顆粒受到的地面的摩擦力f,垃圾顆粒才能在地面上發生移動,即
式中,μ為地面和垃圾顆粒之間的摩擦系數;FX為刷毛對顆粒的水平清掃合力;FY為地面對垃圾顆粒的支持力。
為了能夠更直觀地分析刷毛對顆粒的作用,以及為下一節觸地深度的分析做鋪墊,本節在這里設定一個臨界的摩擦系數μX,則
式中,n為刷束中刷毛的根數,在這里,取n值為10。
在清掃時,若垃圾顆粒與地面的實際摩擦系數μ小于臨界摩擦系數μX,則說明垃圾顆粒可以被盤刷刷毛成功清掃。因此,可以通過計算得到臨界摩擦系數μX與水平方向上移動的距離U1的關系,如圖6所示,以此來判斷垃圾顆粒是否被成功清掃。
從圖6可以看到,在刷毛觸地深度為零,即為自由狀態下,直接對垃圾顆粒進行清掃的情況下,刷毛從與垃圾顆粒的左上端點接觸,到與其上表面接觸,直達與顆粒完全脫離,這個過程中,臨界摩擦系數μX的最大值為0.22,也就是說,當垃圾顆粒與地面之間的實際摩擦系數μ小于0.22時,就可以被盤刷刷毛掃動,即有效清掃。
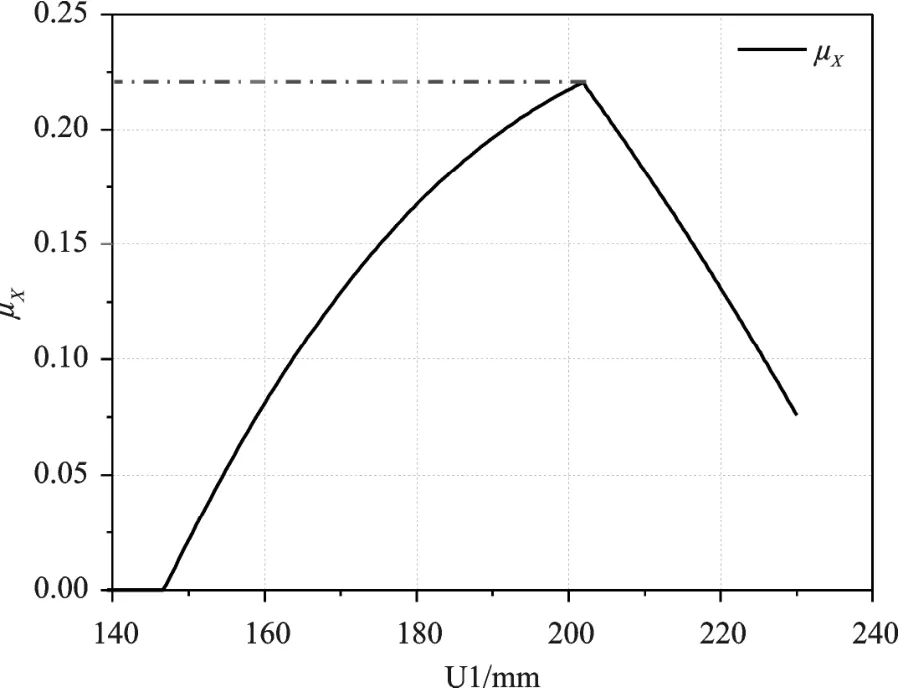
圖6 臨界摩擦系數μX的變化趨勢
3.2 刷毛觸地后與顆粒接觸
刷毛在與垃圾顆粒接觸之前,都會先有一定程度上的壓縮變形,這是由盤刷自身的重量以及盤刷觸地壓力調節機構所決定的。在合理的觸地壓力下,刷毛具有一定的觸地深度,從而發生形變。合理的壓縮狀態下的刷毛對顆粒進行清掃時,會把一定的彈性勢能傳遞給垃圾顆粒,從而更有助于垃圾被成功清掃。
通過給予刷毛豎直方向上10 mm、20 mm、 30 mm等不同的觸地深度,分別模擬刷毛與顆粒的接觸過程,可以得到在不同觸地深度下,垃圾顆粒受到的水平方向上的合力,即盤刷刷毛對顆粒的水平清掃力,如圖7所示。從圖中可以看出,隨著觸地深度的加大,刷毛給予垃圾顆粒的水平方向上的清掃力也在不斷增大,這是由于刷毛壓縮變形的一部分彈性勢能釋放,傳遞給了垃圾顆粒,轉變成清掃力,有利于顆粒被掃動。但是可以觀察到,清掃力增大的趨勢在減小,因此,可以說明,過大觸地深度在增加刷毛磨損的同時也不利于刷毛對顆粒的成功清掃,所以存在一個合理的觸地深度值,對提升刷毛的清掃性能十分關鍵。
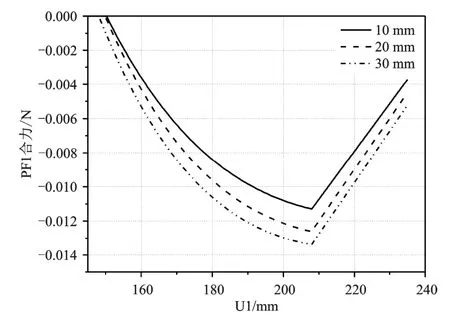
圖7 壓縮狀態下刷毛的水平清掃合力
本節所建立的模型中,刷毛在不同觸地深度下,所求得的垃圾顆粒受到的繞著右下端點2的轉矩依舊小于顆粒自身重力在端點2的逆轉矩0.5amg,因此,仍舊不滿足顆粒在刷毛作用下發生轉動的臨界條件。所以,垃圾顆粒是否能夠被刷毛成功清掃,還是取決與刷毛的水平清掃力FX。
為了直觀地說明觸地深度對于清掃力的影響,采用上文中的臨界摩擦系數μX,通過在不同的觸地深度下,分別求出垃圾顆粒在豎直方向和水平方向上所受到的力,進而求出臨界摩擦系數,得到臨界摩擦系數與刷毛觸地深度的變化趨勢,如圖8所示。
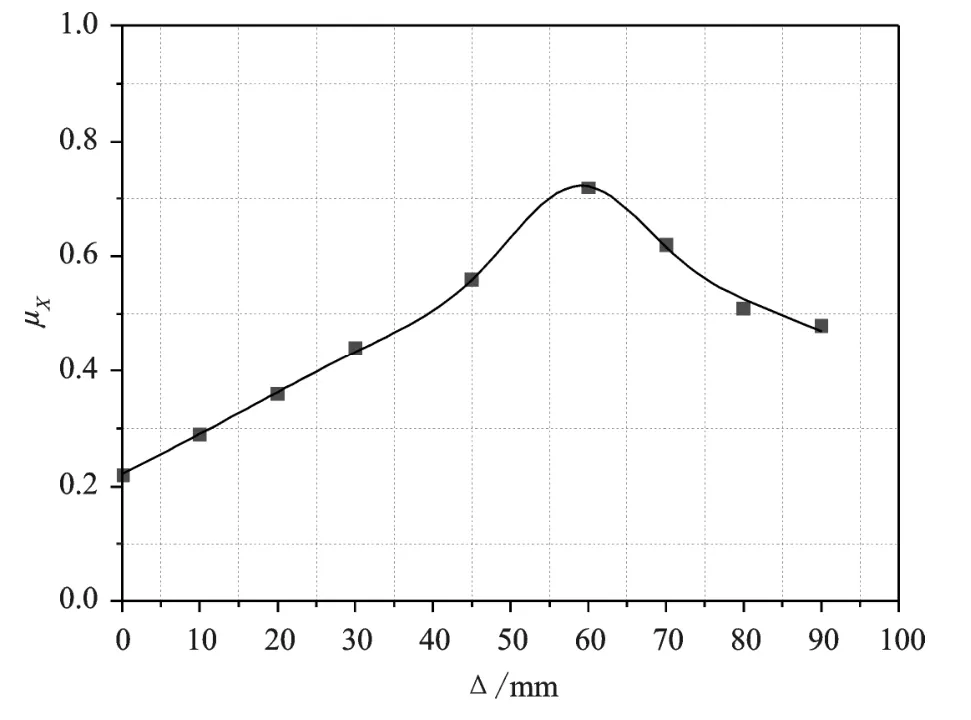
圖8 臨界摩擦系μX數與觸地深度的關系
從圖8中可以觀察到,前期隨著刷毛觸地深度的增加,臨界摩擦系數μX也在不斷變大,在觸地深度60 mm左右時,達到最大值0.72,即當垃圾顆粒與地面之間的實際摩擦系數μ小于0.72時,均可以被盤刷刷毛成功有效清掃。之后,觸地深度繼續增大,臨界摩擦系數反而逐漸變小,盤刷刷毛的清掃性能降低,這是因為過大的觸地深度會使刷毛形變增大,給予垃圾顆粒的壓力也不斷變大,這會增大顆粒與地面的摩擦力,加大了清掃難度,同時觸地深度變大會加大刷毛的磨損程度。
4 小結
本章目的在于了解盤刷刷毛清掃的過程,采用有限元方法對盤刷刷毛的清掃性能進行分析,在滿足所提出的四點假設的基礎上,對刷毛與顆粒的模型進行了簡化。但是由于盤刷刷毛與垃圾顆粒的接觸過程作為高度非線性問題,對其過程的分析還是存在較大困難,一方面是因為在清掃過程中盤刷刷毛的變形情況無法知曉,另一方面在刷毛與垃圾顆粒的接觸過程中,刷毛沿著顆粒發生滑動,其與垃圾顆粒的接觸點不斷在變,不同位置的邊界條件不同,無法確定,因此,建立合理的有限元模型十分關鍵。
為了更好地分析刷毛與顆粒的接觸過程,本章在ABAQUS軟件中分別建立了兩個模型來模擬清掃過程,一個是盤刷刷毛不與地面接觸,直接 在位移載荷的作用下,與顆粒發生相互作用,另一個是對刷毛先施加不同的觸地深度,而后與顆粒接觸。在模擬接觸過程后,得到了刷毛對于垃圾顆粒在水平方向和豎直方向上的清掃力,以及顆粒沿著運動方向受到的轉矩。在對受力數據進行分析之后,得到了清掃力及力矩的變化規律,之后,在不同觸地深度的對比之下,得到刷毛的最佳觸地深度值。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
