基于北斗的輪履復合式清掃車
2023-02-28 19:01:02藺巖松吳金軒胡宇航
電子產品世界 2023年2期
藺巖松 吳金軒 胡宇航
摘 要:傳統的垃圾清掃依靠大量的人力,拾撿效率低且成本較大,為此設計了基于北斗的輪履復合式清掃車,利用北斗衛星對路況的實時檢測及定位功能,實現對街道車流量等信息采集,并自主規劃清掃路線。此外,對清掃車的車體結構進行了整體改造,車輪與履帶的復合行進模式能夠通過大部分清掃工作過程中遇到的復雜地形。
關鍵詞:北斗;輪履復合;自主規劃;垃圾清掃
*基金項目:沈陽航空航天大學大學生創新創業訓練計劃項目(X202210143008)
1 前言
現有智能垃圾車一般沒有配備衛星導航裝置,不能實現全自主行進功能,是智能化垃圾車難以實際應用的重要因素之一。
北斗衛星導航系統是我國自主建設、獨立運行的衛星導航定位系統,系統能提供時間和空間基準,以及與位置相關的實時動態信息,將北斗系統導入垃圾清掃機器車中,符合國家將北斗衛星全行業植入發展的科技戰略和保護環境的基本宗旨,也是改善社會公共服務和提高人民生活環境水平的重要舉措。
2 系統總體方案設計
系統功能模塊包括:中心控制模塊、北斗路況檢測模塊、北斗導航定位模塊、自主動態避障模塊、工作行進模塊、垃圾撿取模塊,各模塊功能簡介見表1。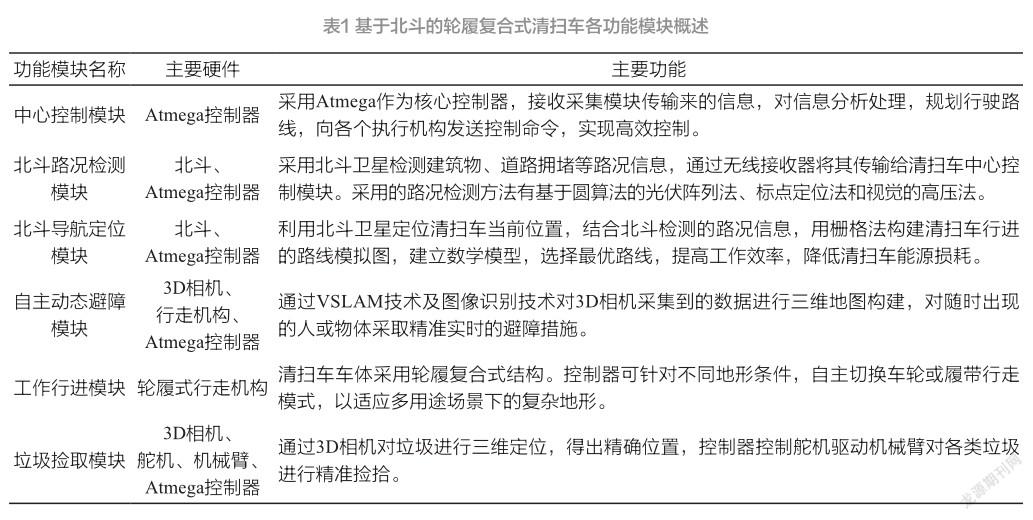
根據上述分析,本項目主要實現功能如下:
1)本車采用北斗導航定位彌補不足,規劃出多種線路,進行擇優選擇;
2)采用自主避障模式保證人員與車輛安全,利用北斗衛星對周圍環境人員密集度的實時檢測,避免大規模人群;
3)用輪履復合結構有效應對多種復雜環境,3種工作模式的適時切換,可通過絕大部分復雜地形。
3 主要功能模塊設計
3.1 清掃車中心控制模塊
清掃車硬件組成框圖如圖1所示,圖中的中心控制模塊對北斗和3D相機傳遞回來的信息分析處理,之后對工作行進模塊以及垃圾撿拾模塊進行控制。
基于功能需求、成本和資源豐富性考慮,清掃車中心控制模塊采用Atmega為核心控制器。Atmega具有高性能、低功耗的8位AVR微處理器,兩個具有獨立預分頻器和比較器功能的8位定時器、比較器,使得其在圖像處理上有更大優勢,便于基于VSLAM技術構建清掃車所在區域的三維地圖。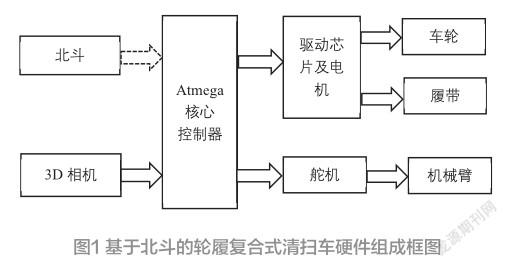
3.2 北斗路況檢測模塊
北斗衛星可以采集一定范圍內的路況信息,通過ATK -S1216F8-BD 北斗模塊將數據傳輸到Atmega控制器中。系統在其與北斗導航系統信號傳輸的同時將地理位置傳輸到中心控制模塊,并通過數據存儲相關模塊進行短期的地理位置的數據存儲,最終將實時的地理位置數據傳輸到控制中心的數據處理系統終端。
后Atmega控制器采用圓算法的光伏陣列、標點定位、視覺的高壓方法檢測識別不同的路況信息。路況信息檢測識別過程如圖2所示。
1)檢測道路分布情況
使用圓算法的光伏陣列法,首先建立道路模型、城市模型和定位子系統,掃描大致路況,然后構建數學模型,采用圓算法對道路的分布情況進行檢測,使清掃車可以得到可行進的道路,避免清掃車在道路上亂行。
2)檢測識別建筑物
使用標點定位法,首先用柵格法建立路況的模型,其中用小方格代表所檢測的環境,并對環境矩形建模。接著建立道路上高大建筑物、樹木等數學模型,根據模型進行訓練,檢測識別出建筑物,避免發生危險。
3)檢測車、人流量
使用視覺高壓法,北斗衛星具有自動化視覺檢測定位子系統,根據全局搜索與區域細分檢驗相結合的原理,進行投影變換。可對車流量、人流量密集的道路進行檢測,當一些車流量、人流量密集的時候,清掃車可以暫時排除此道路。
3.3 導航定位模塊
導航定位模塊分為兩個部分:北斗定位和自主規劃最優路線。
1)北斗定位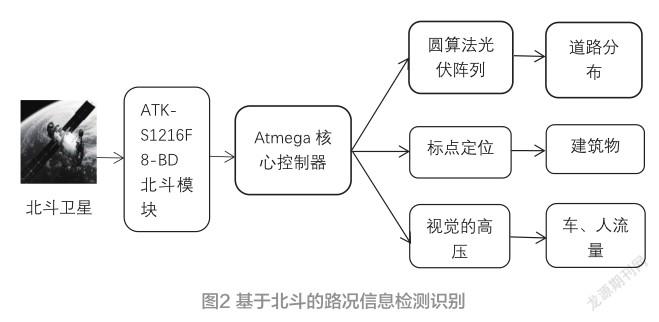
利用北斗衛星的定位技術將清掃車出發點的地理位置、終點的地理位置、清掃車實時位置相比較,通過北斗導航定位中的二維定位法,確定位置信息的經緯度。同時采用圓算法的光伏陣列法,將從出發點到終點的所有路徑進行整合,為下一步進行路線規劃打好基礎。
2)自主動態地規劃最優清掃路線
采用柵格法構建清掃車行進的路線模擬圖,從所有由出發點到終點的清掃路線中,結合實時路況擁堵情況,選擇出清掃時間最短的最優路線。
如圖4可知,當存在紅燈和擁擠時,清掃車在建筑物②左上角處拐彎然后在建筑物⑧右下角處拐彎再在建筑物 右上角處拐彎,最后在建筑物 左下角處拐彎,共需要經過27個小格,為最優路線。采用柵格法將城市道路轉化為數學模型,通過計算,分析清掃車的工作時的車速。清掃車的行駛速度應在3~20 km/h,清掃車根據路面的實際情況來調整車速。清掃路線模擬圖如圖6所示。圖中深黑色箭頭,在沒有經過紅燈和人群路段時會加快車速。例如,箭頭經過路線為27小格,代表實際距離為13.5 km。此時為節約時間保證清掃干凈,車速將控制在15~20 km/h。所以所需要的時間為0.675~0.9 h。在工作途中遇到行人、車輛會停止避免發生危險。例如,圖6灰色箭頭所示,途中經過紅燈、人群擁堵路段,清掃車會降低車速。箭頭經過路線為31小格,代表實際距離為15.5 km。車速應保持在8~15 km/h,避免發生意外。其中等待紅燈的時間為30 s、經過人群車速為3~8 km/h。所以所需時間為2.66~5.225 h。

3.4 自主動態避障模塊
在清掃車工作過程中,清掃車應對隨時出現的人或物體采取及時、精確、自主的避讓措施,這就要求清掃車能夠對位姿實時改變的人或物體進行分析,并進行自主動態避障,為清掃車在所處實時變化的環境下的工作安全提供保障。
對比幾種在二維平面中進行測距實現避障的策略,本設計選用3D相機作為采集信息的視覺傳感器,利用3D相帶有的測距功能,采用VSLAM技術,通過構建三維地圖的方式搭建清掃車周邊的環境地圖,相比其它距離傳感器而言,應用3D視覺傳感器更能獲取足夠豐富的圖像信息。
VSLAM處理流程如圖5所示。通過VSLAM處理相機采集的多幀圖像來估計自身的位姿變化,而后通過累計位姿的變化計算出清掃車與人或物體的距離,并進行地圖構建與全局定位;采用圖像處理技術進行閉環檢測,即采用邊緣描述法和體積描述法描述VSLAM構建地圖中的人或物體的幾何特性,并對目標位姿進行數據標注;對經由閉環檢測得到的信息,由核心控制器對所構建的三維地圖中的物體的幾何特性信息、位姿信息進行分析比對和優化處理,完成全局軌跡和地圖的構建;最后進行自主動態避障決策,實現清掃車的自主動態避障。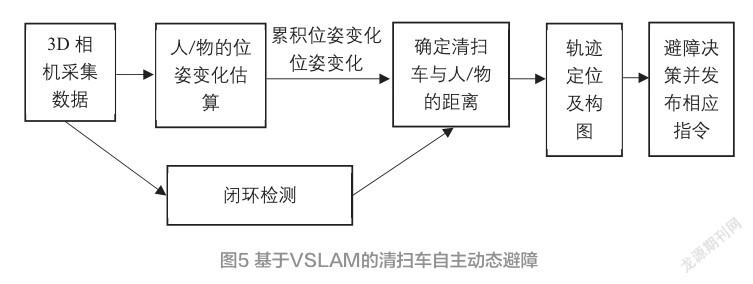
3.5 面對復雜地形的行走模式自主切換
1)履帶模式
履帶模式采用履帶接觸地面,車輪附著在履帶兩側。履帶模式特點為行進平穩,行進速度較為緩慢,重心低,附著系數大,具有良好的抗側翻和抗滑坡性能,同時還具有轉彎半徑小的機動性,爬坡能力強等優越的越野性能,屬于全地形的作業機械。
2)車輪模式
車輪模式采用車輪接觸地面,傳動桿伸長以抬高車體。車輪模式特點為行進速度較快,效率高,車輪可 180度調節故其方向調整靈活度高,機動性強。適用于較為平坦的路面以及水洼等需要抬高車體的情況,因其高機動性能也適用于人員較為密集的場所。
3)輪履復合模式
輪履復合模式采用車輪與履帶的同時作用,傳動桿伸縮自身長度以改變車輪與履帶間距。輪履復合模式特點為可實時調節車輛重心,保持車身穩定性,車輪履帶相互作用,可彌補各自缺點。適用于臺階、樓梯等復雜路況。
4 結束語
本文針對垃圾清掃車自主規劃清掃路線這一特殊要求,在自主避障研究的基礎上與北斗衛星相結合,提高了自主清掃能力。并且對復雜地形進行了分析,對車體結構進行改良,效果良好。
參考文獻:
[1] 蔣勇.地面清潔機器人結構及控制系統設計[D].南京:南京理工大學,2018.
[2] 李延斌,牛雷,佟賀.基于GPS的智能車自動駕駛系統的研制[J].電子產品世界,2018,25(11):61-63,50.
[3] 冉冬東.輪履切換型道路垃圾清理機器人的設計[J].工程科技Ⅱ輯, 2021,40(5):42-44.
[4] 李雪艷.智能掃地車系統設計與研究[J].機電信息,2015(33):179-180.
[5] 許俊勇.移動機器人全景vSLAM研究[D].上海:上海交通大學, 2008.
[6] 尹韜儒.無人駕駛垃圾清掃車的設計與北斗導航定位系統應用[J].中國新技術新產品,2016(16):19-20.
[7] 張明路,李敏,田穎,等.輪履復合被動自適應機器人設計與參數分析[J].機械科學與技術,2019,38(2):198-204.