基于PLC的某靶彈發(fā)射車調(diào)平系統(tǒng)設(shè)計(jì)
2023-02-28 08:44:06王天輝付京來(lái)羅晨
機(jī)床與液壓 2023年3期
關(guān)鍵詞:系統(tǒng)
王天輝,付京來(lái),羅晨
(1.中國(guó)人民解放軍91851部隊(duì),遼寧葫蘆島 125000;2.鄭州機(jī)電工程研究所,河南鄭州 450015)
0 前言
靶彈作為模擬敵方來(lái)襲的反艦導(dǎo)彈,為保證安全,對(duì)其飛行精度往往要求較高。某靶彈發(fā)射車通過(guò)換裝不同適配支架,能夠?qū)崿F(xiàn)多類型靶彈發(fā)射,為靶彈的飛行提供發(fā)射平臺(tái)和初始指向。為保障靶彈指向精度,對(duì)發(fā)射車的調(diào)平精度也提出了較高的要求,為滿足靶彈的發(fā)射需求,本文作者設(shè)計(jì)一種基于PLC的靶彈發(fā)射車液壓調(diào)平系統(tǒng)。
發(fā)射車支撐可采用支腿單獨(dú)承載(輪胎離地),或輪胎與支腿共同承載(輪胎不離地)或輪胎單獨(dú)承載等3種方式[1]。因靶彈發(fā)射瞬間沖擊載荷較大,此設(shè)計(jì)采用支腿單獨(dú)承載(輪胎離地)方式,以減少靶彈發(fā)射瞬間和發(fā)射車平臺(tái)的姿態(tài)變化。
1 系統(tǒng)指標(biāo)、組成及工作原理
1.1 系統(tǒng)的調(diào)平指標(biāo)
根據(jù)某發(fā)射車的使用環(huán)境要求,該發(fā)射車能夠在坡度不大于3°的路面進(jìn)行調(diào)平。調(diào)平后,該發(fā)射車的前后和左右水平度要小于3′。當(dāng)發(fā)射車停留的坡度大于3°時(shí),發(fā)射車能夠報(bào)警,并提示駕駛員進(jìn)行調(diào)整位置或?qū)Φ孛孢M(jìn)行平整。系統(tǒng)調(diào)平時(shí)間小于3 min,系統(tǒng)調(diào)平后精度保持時(shí)間不小于4 h。
1.2 系統(tǒng)的組成
調(diào)平系統(tǒng)由支撐調(diào)平機(jī)構(gòu)和調(diào)平控制系統(tǒng)組成。支撐調(diào)平機(jī)構(gòu)為調(diào)平系統(tǒng)的執(zhí)行機(jī)構(gòu),包括4個(gè)調(diào)平支腿、橫展機(jī)構(gòu)、平伸油缸等。調(diào)平控制系統(tǒng)采用成熟的PLC控制,主要由PLC、液壓泵站、閥組、管路、傾角傳感器等組成。在調(diào)平控制系統(tǒng)控制下可實(shí)現(xiàn)發(fā)射車的自動(dòng)調(diào)平[2-3],保證載車平臺(tái)的姿態(tài)滿足靶彈發(fā)射所需的基準(zhǔn)角度。4個(gè)調(diào)平支腿分別安裝在車底盤前和后部,橫展機(jī)構(gòu)(含油缸)裝載在底盤上,用于增大調(diào)平支腿的橫向跨距,提高發(fā)射平臺(tái)的穩(wěn)定性。調(diào)平控制系統(tǒng)在PLC的控制下工作,傾角傳感器測(cè)量載車底盤水平角發(fā)送給PLC,PLC按照調(diào)平控制程序調(diào)節(jié)液壓閥開關(guān)時(shí)間,實(shí)現(xiàn)發(fā)射車的自動(dòng)調(diào)平[4]。其整體結(jié)構(gòu)如圖1所示。

圖1 某發(fā)射車整體結(jié)構(gòu)Fig.1 General structure of the launch vehicle
2 系統(tǒng)的工作原理及控制策略
2.1 系統(tǒng)的工作原理
此系統(tǒng)采用“橫展+同步舉升+調(diào)平”的控制策略。橫展是增大發(fā)射車支撐的橫向跨距;同步舉升是4個(gè)調(diào)平液壓支腿同步伸出,使發(fā)射車的輪胎能夠離地。橫展的執(zhí)行機(jī)構(gòu)為4個(gè)展收液壓缸,同步舉升和調(diào)平執(zhí)行機(jī)構(gòu)是4個(gè)調(diào)平支腿。此系統(tǒng)的調(diào)平控制系統(tǒng)設(shè)計(jì)框圖如圖2所示。
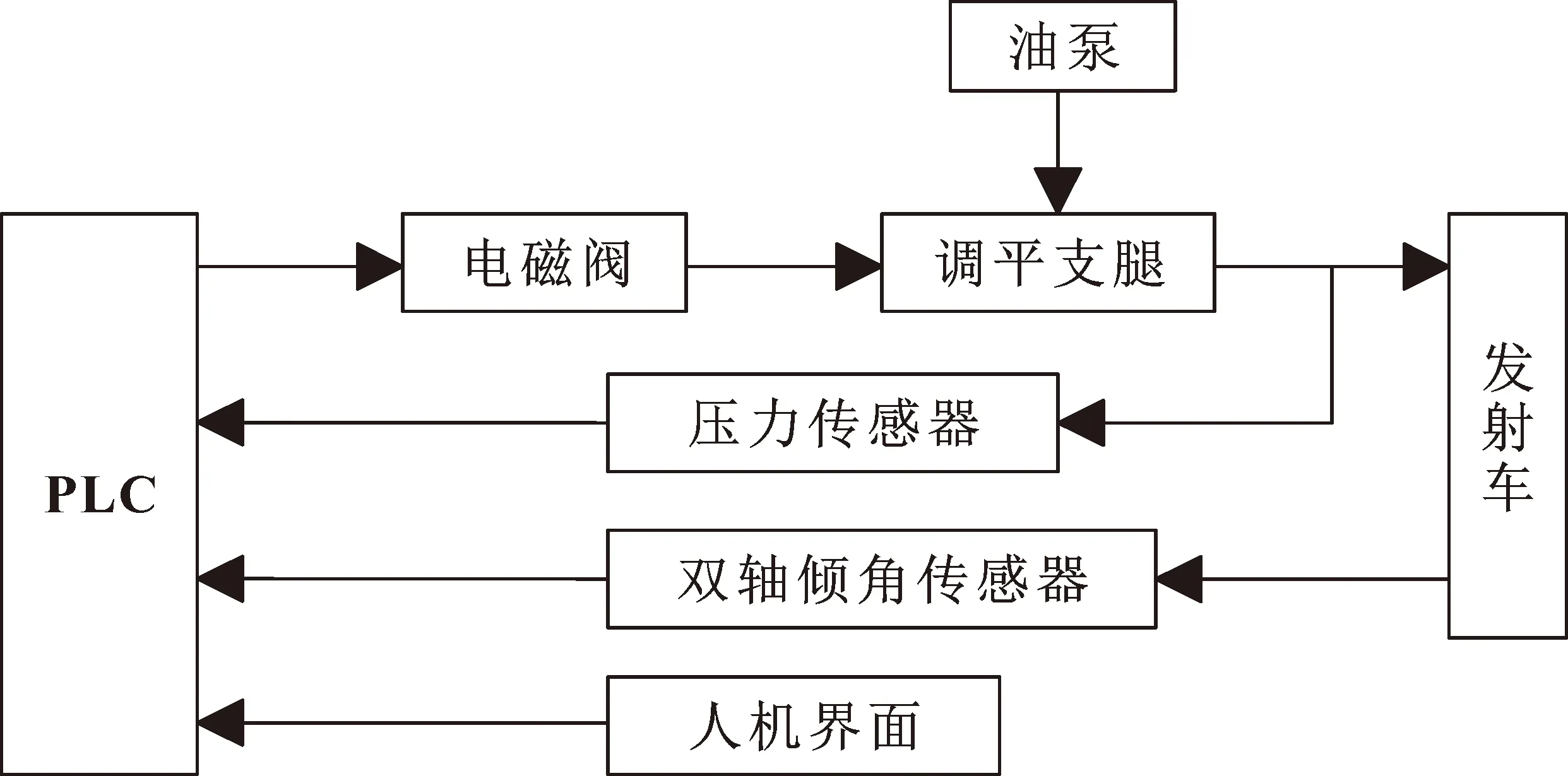
圖2 調(diào)平控制系統(tǒng)設(shè)計(jì)Fig.2 Design of the leveling control system
壓力傳感器將支腿的壓力實(shí)時(shí)傳遞給PLC并顯示在人機(jī)界面上,作為虛腿的判斷條件。雙軸傾角傳感器將發(fā)射車橫向和縱向的傾角實(shí)時(shí)傳送至PLC并顯示在人機(jī)界面上,PLC根據(jù)預(yù)先設(shè)定的調(diào)平程序輸出控制信號(hào),控制電磁閥相應(yīng)地開啟或關(guān)閉,調(diào)平支腿就會(huì)在油泵液壓動(dòng)力和車身重力的作用下,產(chǎn)生向上或向下的運(yùn)動(dòng)。當(dāng)誤差信號(hào)達(dá)到指定的誤差范圍時(shí),PLC發(fā)出停止命令,調(diào)平結(jié)束后保持此平衡穩(wěn)定的狀態(tài)。
2.2 橫展及舉升的控制策略
發(fā)射車的橫展動(dòng)作采用行程開關(guān)控制,當(dāng)PLC收到4個(gè)行程開關(guān)發(fā)出的橫展到位后,停止橫展伸出。
同步舉升的目的主要是發(fā)射車4個(gè)輪胎離地,并保障在調(diào)平過(guò)程中,不發(fā)生輪胎觸地現(xiàn)象,因此同步舉升距離要考慮發(fā)射車前后懸掛長(zhǎng)度。發(fā)射車上坡狀態(tài)示意如圖3所示。支腿離地距離為L(zhǎng)1,前懸掛伸出量為L(zhǎng)2,后懸掛伸出量為L(zhǎng)3,該發(fā)射車L2>L3,前支腿距離前輪中心距離為L(zhǎng)4,地面傾角為α。同步舉升距離L=L1+L2+L4·sinα,支腿伸出速度為v,則同步舉升時(shí)間t=L/v。同理可求得下坡路情況下的同步舉升時(shí)間。

圖3 發(fā)射車上坡狀態(tài)示意Fig.3 Schematic of the launch vehicle uphill state
2.3 調(diào)平控制策略
常用的調(diào)平方法有:逐高法(只升不降,向最高點(diǎn)看齊)、逐低法(只降不升,向最低點(diǎn)看齊)、中心不動(dòng)法(向中間點(diǎn)靠攏)[5-6]。此系統(tǒng)為防止在調(diào)平過(guò)程中產(chǎn)生虛腿,采用逐高法來(lái)實(shí)現(xiàn)發(fā)射車調(diào)平。
建立調(diào)平數(shù)學(xué)模型如圖4所示,水平面坐標(biāo)系為OX0Y0Z0,與車體固聯(lián)的平臺(tái)坐標(biāo)系為OX1Y1Z1,兩坐標(biāo)系的X軸和Y軸的夾角為雙傾角傳感器輸出的角度值。發(fā)射車調(diào)平的目標(biāo)是平臺(tái)坐標(biāo)平面X1OY1與水平坐標(biāo)系平面X0OY0重合,即夾角α和β為0。根據(jù)兩坐標(biāo)系的夾角符號(hào),可找到最高支腳,其判別法則如表1所示。

圖4 發(fā)射車調(diào)平的數(shù)學(xué)模型Fig.4 Leveling mathematical model of the launch vehicle

表1 最高點(diǎn)判別法則Tab.1 Rule of the highest point
由于夾角α和β的值比較小,可采用坐標(biāo)系間坐標(biāo)變換理論來(lái)求解各支腿的行程[7]。由平臺(tái)坐標(biāo)系OX1Y1Z1向水平面坐標(biāo)系OX0Y0Z0變換,先繞Y軸旋轉(zhuǎn)α角,其變換矩陣[8]為
(1)
保持α不變,繞X軸旋轉(zhuǎn)β角,其轉(zhuǎn)換矩陣為
(2)
由于發(fā)射車平臺(tái)繞Z軸的旋轉(zhuǎn)角γ小到可以忽略不計(jì)[9],因此坐標(biāo)系OX1Y1Z1向坐標(biāo)系OX0Y0Z0的變換矩陣R=R2·R1為

(3)

(4)
以表1中序號(hào)1情況為例,支點(diǎn)3為最高點(diǎn),則各支腿升高距離為:e1=Lsinα+Wcosαsinβ、e2=Wsinβ、e3=0、e4=Lcosβsinα,各支腿的總上升時(shí)間t=e/v。支腿的上升速度由液壓的流量控制,當(dāng)液壓流量一定時(shí),可通過(guò)控制各支腿液壓閥的開通時(shí)間來(lái)控制支腿的上升距離。
3 調(diào)平系統(tǒng)設(shè)計(jì)
3.1 硬件設(shè)計(jì)
液壓系統(tǒng)主要由液壓油箱、電機(jī)泵組、手動(dòng)泵、操作閥箱(含調(diào)壓閥組、換向閥閥組)、調(diào)平速度切換裝置、支腿調(diào)平液壓缸、支腿橫展液壓缸等組成。支腿橫展液壓缸主要完成橫展運(yùn)動(dòng),支腿調(diào)平液壓缸主要完成支腿的舉升和調(diào)平,調(diào)平速度切換裝置主要完成調(diào)平油缸快慢速切換功能。在支腿橫展、舉升、傾角大于20′和撤收過(guò)程中都采用快速模式,當(dāng)傾角在20′之內(nèi)采用慢速模式。支腿調(diào)平油缸為雙作用液壓油缸,油缸上集成液控單向閥和平衡閥,能實(shí)現(xiàn)液壓鎖定,并具備因過(guò)載或油管爆裂時(shí)油缸位置鎖定功能[10]。
3.2 軟件設(shè)計(jì)
液壓系統(tǒng)工作過(guò)程可分為展開和撤收兩部分,展開工作流程為:?jiǎn)?dòng)電機(jī)泵組→系統(tǒng)建壓→調(diào)平支腿展收油缸伸出→支腿調(diào)平油缸快速伸出→支腿調(diào)平油缸調(diào)平→系統(tǒng)卸荷、關(guān)機(jī)。系統(tǒng)工作流程如圖5所示。撤收工作流程為:?jiǎn)?dòng)電機(jī)泵組→系統(tǒng)建壓→支腿調(diào)平油缸快速收回→調(diào)平支腿展收油缸收回→系統(tǒng)卸荷、關(guān)機(jī)。
系統(tǒng)將壓力傳感器的值作為判斷虛腿的條件:當(dāng)同步舉升時(shí)間到時(shí),壓力值小于設(shè)定值時(shí),認(rèn)為液壓支腿存在虛腿現(xiàn)象,繼續(xù)同步舉升動(dòng)作,直至壓力值大于設(shè)定值。在調(diào)平過(guò)程中,采用逐高法能有效避免在調(diào)平過(guò)程中產(chǎn)生虛腿[11]。系統(tǒng)在調(diào)平過(guò)程中,先采用粗調(diào)平流程,此時(shí),傾角大于20′,PLC根據(jù)雙軸傾角傳感器的數(shù)據(jù),采用逐高法,計(jì)算各個(gè)支腿的運(yùn)動(dòng)時(shí)間,控制支腿快速伸出。當(dāng)雙軸傾角均小于20′,采用精調(diào)平流程,降低支腿運(yùn)動(dòng)速度,減少發(fā)射車在調(diào)平過(guò)程的超調(diào)和振動(dòng)[12]。當(dāng)雙軸傾角均小于3′時(shí),調(diào)平結(jié)束。

圖5 液壓系統(tǒng)工作流程Fig.5 Work flow of the hydraulic system
4 試驗(yàn)驗(yàn)證
為檢驗(yàn)發(fā)射車調(diào)平的控制精度和穩(wěn)定性,將發(fā)射車停在具有一定坡度的地面,傾角傳感器顯示X軸方向初始角度為2.86°,Y軸方向初始角度為1.67°。利用遠(yuǎn)程監(jiān)控軟件對(duì)發(fā)射車調(diào)平過(guò)程中的傾角變化進(jìn)行記錄如圖6所示。
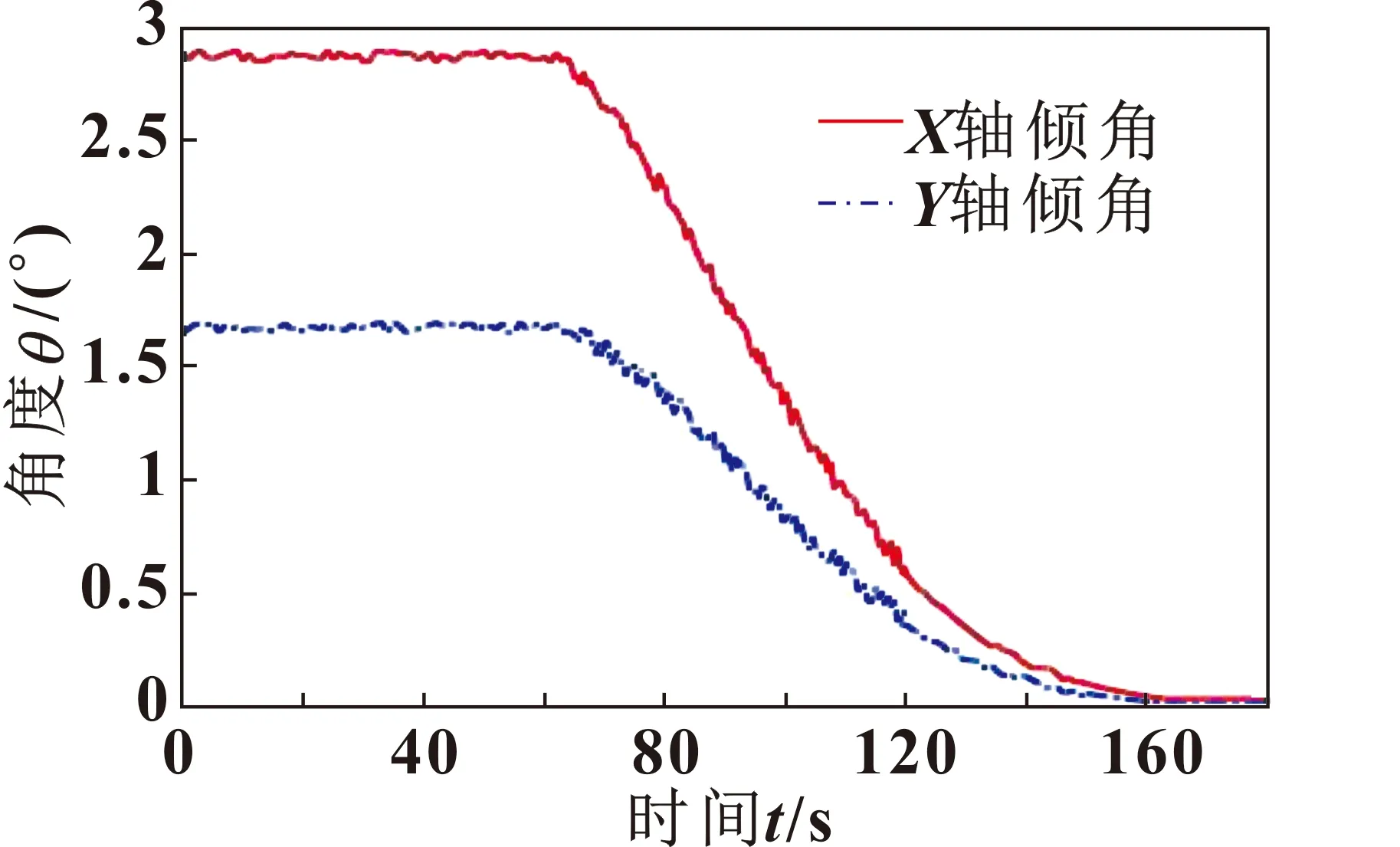
圖6 調(diào)平過(guò)程中雙軸傾角輸出Fig.6 The dual-inclination output in the leveling process
由圖6可以看出:發(fā)射車支腿橫展和同步舉升用時(shí)為65 s,調(diào)平結(jié)束X軸方向的夾角α為2.63′,Y軸方向的夾角β為1.78′,均滿足指標(biāo)(不大于3′)要求,調(diào)平時(shí)間為163 s,滿足調(diào)平時(shí)間的指標(biāo)要求。調(diào)平后保持4 h,X軸方向的夾角α變?yōu)?.76′,Y軸方向的夾角β為1.63′,滿足調(diào)平保持時(shí)間要求。
5 結(jié)束語(yǔ)
文中針對(duì)靶彈發(fā)射的使用要求和指標(biāo)要求,設(shè)計(jì)某靶彈發(fā)射車調(diào)平系統(tǒng)。該系統(tǒng)采用擴(kuò)大橫展和同步舉升的方法,有效提高了發(fā)射車的穩(wěn)定性和抗發(fā)射沖擊的能力。通過(guò)將壓力、傾角作為控制的雙重反饋量和采用逐高法的調(diào)平控制策略,避免了虛腿現(xiàn)象的出現(xiàn)。在調(diào)平過(guò)程中,采用粗調(diào)平和精調(diào)平2種調(diào)平流程,提高了調(diào)平的效率,減小了發(fā)射車的調(diào)平超調(diào)和振動(dòng),通過(guò)實(shí)際試驗(yàn)驗(yàn)證了發(fā)射車滿足設(shè)計(jì)指標(biāo)要求。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
