可穿戴式上肢康復機器人運動學計算和仿真
2023-02-28 08:43:20郭建廖泰明鄭興強
機床與液壓 2023年3期
郭建,廖泰明,鄭興強
(廣州城市理工學院機械工程學院,廣東廣州510800)
0 前言
近年來,我國人口老齡化趨勢明顯,隨著平均預期壽命的提高,將進一步加速人口老齡化[1]。腦卒中是我國老年人的高發疾病,會造成患者肢體運動功能障礙,合理的康復訓練可以幫助患者恢復肢體運動功能。腦卒中具有高發病率、高致殘率、高死亡率、高復發率、高經濟負擔5大特點[2]。上肢功能的恢復對腦卒中患者的治療有極其重要的作用[3]。積極幫助患者做康復訓練,有利于提高他們的活動能力。但傳統基于人工輔助的康復治療手段的成本較高,效率較低,難以滿足腦卒中患者的康復需求[4-5]。人們的視線開始向康復機器人轉移,因此康復機器人成為康復領域的新焦點。
文中主要研究可穿戴式上肢康復機器人,穿戴式上肢康復機器人體積小、質量輕,能夠滿足患者居家康復訓練的需求,是一種結合智能與機械動力的人機結合可穿戴設備,它通過對人上肢的手腕、前臂、上臂等各部位關節進行支撐和牽引,從而引導患者進行康復訓練[6]。
美國威斯康星大學ISLAM等[7]設計開發了一款名為u-Rob的上肢康復外骨骼,可以對患者肩部和手臂進行針對性的康復訓練,但機構復雜,成本較高。伊朗阿扎德大學ESLAMI等[8]設計一款可調自動平衡被動上肢康復機器人,該上肢康復機器人設計思路新穎,但使用時容易對患者造成二次損傷。北京交通大學郭盛等人[9]研制了一款新型可穿戴上肢康復機構,該機構結合串聯及并聯機構優勢,設計新穎,但結構復雜。濟南大學魯守銀等[10]發明了一款主從式上肢外骨骼康復機器人,采用上肢運動規律的主從式結構進行設計,提高了康復效率,但體積大、舒適度較低。燕山大學嚴浩等人[11-12]研發的一種具有廣義肩關節的康復機器人,減少了肩部安裝位置,但機器末端質量大、對電機要求高。
為解決上述問題,滿足患者日常需求,結合人體上肢結構[13-15],本文作者設計了一個五自由度上肢康復機器人,并對其運動學、可達空間位置進行分析,通過軌跡規劃仿真其康復訓練的可行性。計算和仿真數據為康復機器人運動控制提供數據支持。
1 上肢康復機器人機構設計
選取醫學上肢康復最常用的五自由度結構進行設計,上肢康復機器人的整體結構模型如圖1所示,整體質量約5.5 kg。

圖1 整機結構模型Fig.1 structure model of whole Machine
上肢康復機器人整體結構由機架、肩關節、肩袖、大臂、肘關節、小臂和腕關節七部分組成,涉及5個自由度;采用鋁合金作為主要材料。首先肩關節與機架連接于轉動副1,實現患者大臂的內旋/外旋,轉動范圍為0°~90°;肩關節與肩袖連接于另一個轉動副2,實現患者大臂的內收/外展,轉動范圍為-180°~-60°。肩袖另一端與大臂一端通過轉動副3連接,實現大臂上擺/下擺,轉動范圍為-45°~90°。大臂另一端通過肘關節與小臂連接于轉動副4,實現患者小臂內收/外展,范圍為0°~135°。小臂末端通過轉動副5與腕關節連接,實現患者腕部的內收/外展,范圍為0°~90°。同時在大臂和小臂上均有調整手臂尺寸的結構,以適應不同患者的手臂尺寸。最終通過控制以上各個轉動副的旋轉角度,從而控制上肢康復機器人的運動,完成不同的康復動作。
2 運動學建模和計算
2.1 正運動學計算
上肢康復機器人的結構滿足串聯機器人計算公式,將基坐標系{0}原點建立在轉動副1上,同時OZ軸正向是其軸線向指向手臂的方向;OX軸方向與水平面平行;OY軸方向由右手法則確定。利用改進的D-H方法建立各關節的坐標系如圖2所示。

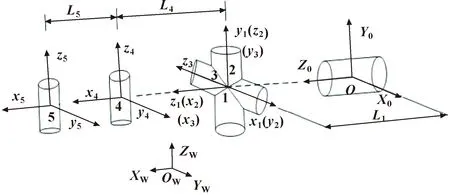
圖2 康復機器人的D-H坐標系Fig.2 The D-H coordinate system of the rehabilitation robot
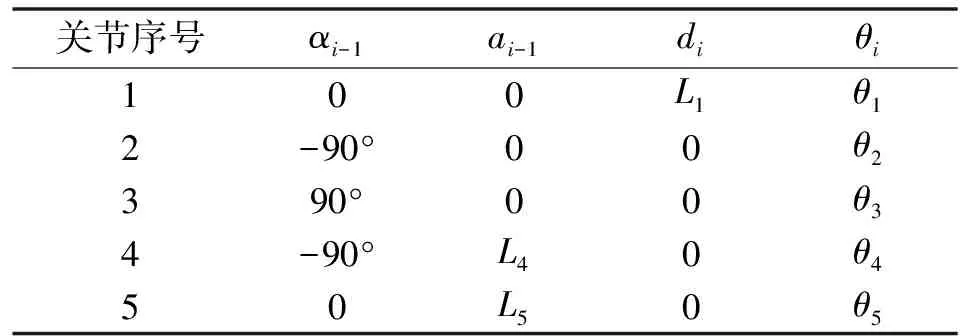
表1 上肢康復機器人的D-H參數
根據D-H參數,代入式(1)可以得到式(2):
(1)
(2)
(3)
其中公式(3)中:
(4)
定義:Si=sinθi,Ci=cosθi,Sijk=sinθisinθk-cosθicosθjcosθk,Cijk=cosθisinθk-sinθicosθjsinθk。

2.2 正運動學驗證
為了驗證正運動學的正確性,通過MATLAB建立上肢康復機器人的數學模型,再分別代入3組不同的數據:
到該數學模型和式(3)中,對比理論計算結果和仿真結果,可以得到表2—表4。

表2 正運動學驗證1

表3 正運動學驗證2

表4 正運動學驗證3
將表2—表4中理論公式的計算結果和MATLAB仿真結果進行對比發現:理論值和仿真值最大誤差為0.03%,而產生誤差的原因來自于無限不循環小數,說明理論值和仿真值一致。
2.3 逆運動學計算

(6)
由式(5)—式(6)得到:
-C2S3=axC1+ayS1
(7)
C3=ayC1-axS1
(8)
C4S3=nyC1-nxS1
(9)
S2S3=az
(10)
-L4C3S2=pz-L1-L5nz
(11)
由式(10)—式(11)得:
(12)
(13)
式(7)乘以ax減去式(8)乘以ay得到:
(14)
(15)
由式(9)得:
(16)
2.4 逆運動學驗證


表5 逆解驗證1

表6 逆解驗證2

表7 逆解驗證3
從上述3個表的結果可以得出:MATLAB的理論值和公式計算的值基本一致,其最大絕對值誤差在0.03%以內。仿真計算結果存在正負值,反映出逆運動學存在多組解的可能。在選擇最優解的時候,會根據上述各個關節限定的角度范圍進行選擇。
3 上肢康復機器人可達空間位置分析
在規劃機器人運動時,需要計算機器人的可達空間位置。為了得出上肢康復機器人的可達空間范圍,采用蒙特卡洛隨機采樣算法,對各個關節角在關節范圍內隨機選取100 000個點進行計算,通過正運動學求解,即可得到相應的末端位置。運用MATLAB繪制各個末端位置點終得出上肢康復機器人的可達空間,結果如圖3—圖6所示。
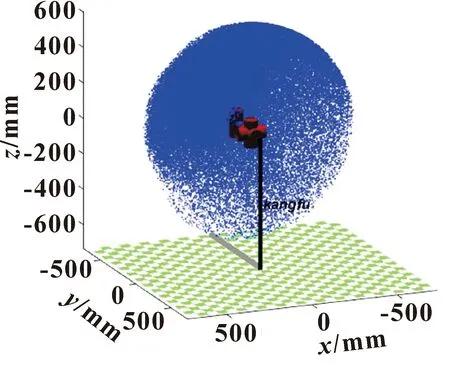
圖3 三維空間

圖4 X-Y平面投影
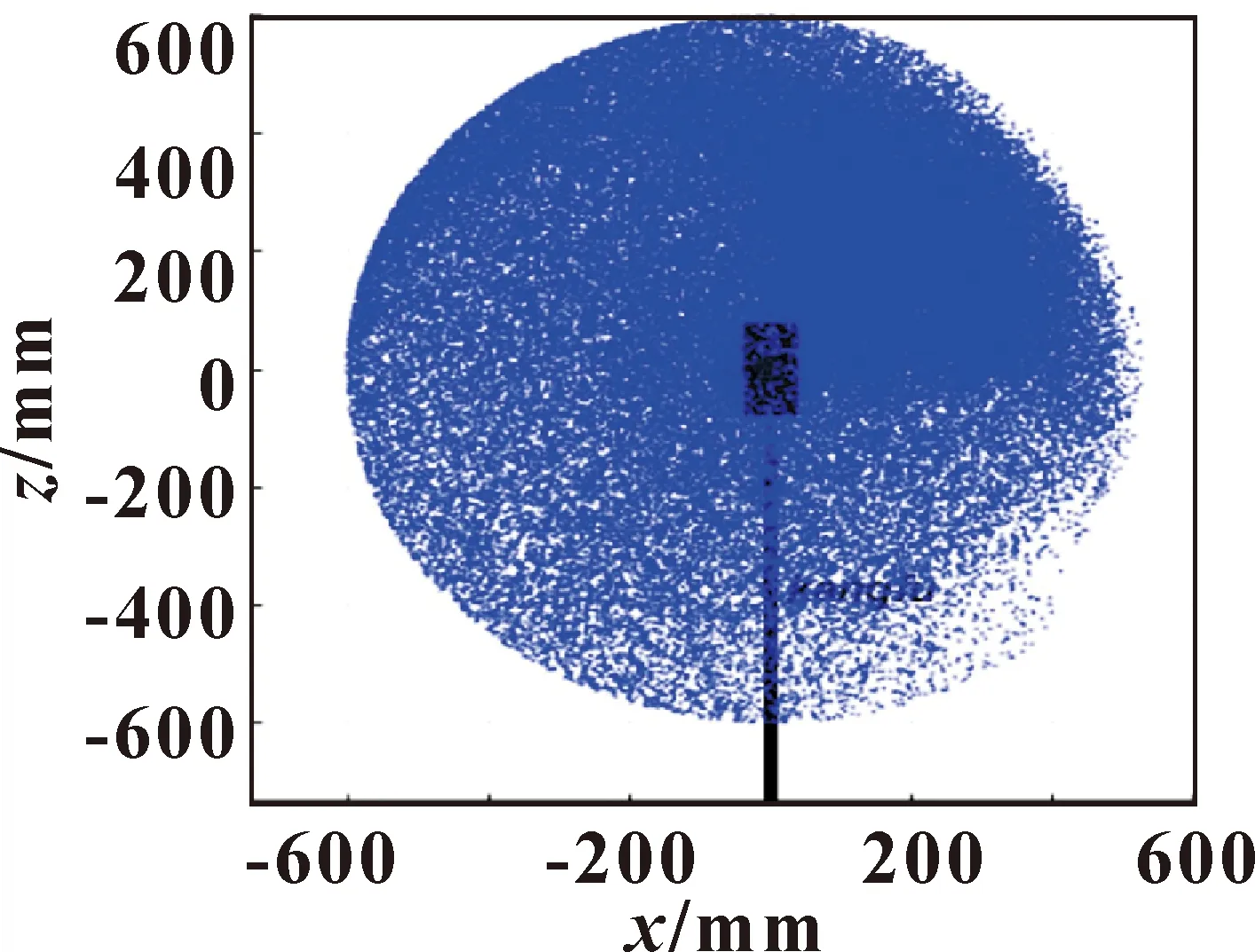
圖5 X-Z平面投影Fig.5 X-Z planar projection

圖6 Y-Z平面投影Fig.6 Y-Z planar projection
在上述計算區域內規劃上肢康復機器人的末端軌跡,能有效避免機器干涉,提高了上肢康復機器人的穩定性,滿足患者康復的日常需求。
4 上肢康復機器人的軌跡規劃和仿真
軌跡規劃是機器人運動控制的前提,機器人的軌跡規劃是根據機器人的任務來確定各自由度運動路徑的過程,其中包括關節空間軌跡規劃和笛卡爾空間軌跡規劃。為了簡化計算量,文中將采用關節空間軌跡規劃來仿真上肢康復機器人,以“在桌上取杯子到胸前”這任務為例。因為上肢康復機器人對于運動軌跡有嚴格的要求,因此需要用五次多項式進行插值,能有效地避免運行死點和振動的產生。
將起始點t0時刻的關節角θ0=[0° -135° 30° 0° 0°]和終止點tf時刻的關節角θf=[0° -173° 0° 115° 0°]代入五次多項式,如式(17)所示:
θ(t)=a0+a1t+a2t2+a3t3+a4t4+a5t5
(17)
同時為了保證始終的關節速度函數和始終的關節角加速度函數的連續,即始終關節速度和始終關節角加速度都為零,其約束條件表示為
(18)
分別將t=0和t=tf代入式(17)得:
(19)
根據式(17)—式(19)解出待定參數:
(20)
通過MATLAB編程進行任務仿真,要求在3.5 s內完成軌跡規劃,步長為0.05 s。軌跡規劃仿真結果和末端執行器的軌跡視圖以及各關節角度、角速度、角加速度曲線,分別如圖7—圖9所示。

圖7 軌跡規劃仿真結果
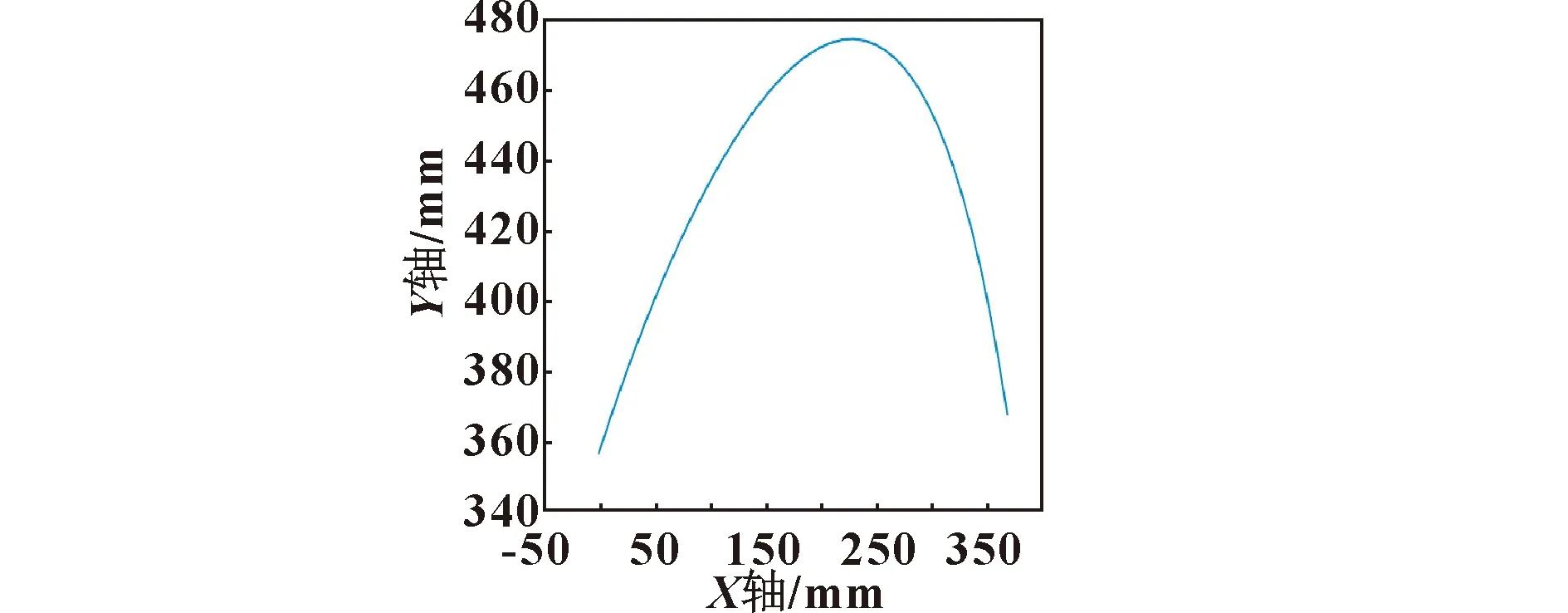
圖8 末端執行器的軌跡視圖(X-Y視圖)

圖9 各關節角度(a),角速度(b),角加速度(c)曲線
從末端執行器的軌跡視圖和各關節角度、角速度、角加速度曲線可以看出:上肢康復機器人完成設定的“取杯子”任務,其中關節2與關節5曲線重合。在通過中間插補點時沒有出現曲線突變的情況,曲線圓滑連續且過渡自然,減少了上肢康復機器人運動時的振動和沖擊,保證了上肢康復機器人穩定運行,有利于提供機器的使用壽命,為患者提供良好的康復訓練。
5 結論
文中對設計的可穿戴式上肢康復機器人模型,結合MATLAB完成數學建模和運動學分析,得出對應的運動學公式,對結果進行驗證和仿真。同時算出模型的可達空間范圍,最后在關節角度范圍內基于五次多項式插值算法完成了“取杯子”任務的軌跡規劃。
(1)結合MATLAB對設計的可穿戴式上肢康復機器人進行建模和分析,推導出運動學公式,建立數學模型,驗證了運動學公式的正確性,為可達空間仿真作鋪墊。
(2)利用運動學公式,分析推導出機器人轉動副1、2、3、4的旋轉角度的表達式,驗證結果符合實際,為控制關節角度運動提供重要的依據。
(3)基于蒙特卡洛隨機采樣算法,對各個關節角在關節角度范圍內隨機選取100 000個點進行計算,通過正運動學求解模型的可達空間范圍。可達空間滿足患者康復的日常需求。
(4)基于五次多項式插值對上肢康復機器人進行“取杯子”任務的關節空間軌跡規劃,結合MATLAB編程仿真,得出圓滑連續且過渡自然的函數曲線,有效地避免了運行死點和振動沖擊的產生,保證了上肢康復機器人穩定運行,為患者提供良好的康復訓練。可為上肢康復機器人運動控制提供數據支持。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
