基于機載LiDAR的鐵路工務設備及周邊環境形變分析
2023-02-25 04:42:58李博聞劉瑞危鳳海梁庚石越峰許貴陽
鐵道建筑 2023年1期
李博聞 劉瑞 危鳳海 梁庚 石越峰,4 許貴陽
1.北京建筑大學 機電與車輛工程學院,北京 100044;2.北京鐵科特種工程技術有限公司,北京 100081;3.中國鐵路北京局集團有限公司,北京 100860;4.中國鐵道科學研究院集團有限公司 鐵道建筑研究所,北京 100081
常規鐵路人工巡檢存在作業效率低、工作環境差、有檢測盲區等問題[1],而無人機作為飛行平臺搭載相關檢測設備,單一架次拍攝范圍達百米級,可大幅提高巡檢效率。鐵路檢測應用中,無人機在安全飛行范圍內可以快速到達現場,搭載機載LiDAR 對現場進行掃描,并通過后續處理對現場存在的安全隱患進行評估[2]。尤其針對山區鐵路,能夠忽略地形影響,大大縮短數據獲取周期,在鐵路工程中應用機載LiDAR 將成為必然趨勢。
點云是在同一空間參考系下表達目標空間分布和目標表面特性的海量點集合;形變分析用來計算同一空間點位的距離變化,用于分析對象的表面形態與體積改變[3]。部分學者以點云數據為研究對象進行了形變分析方法研究。李珵等[4]將激光雷達掃描技術用于地鐵隧道形變監測,提出基于激光點云的隧道斷面連續提取與形變分析方法,為隧道形變動態監測提供借鑒。劉尚昆等[5]應用激光雷達開發了一套能夠實現智能化輔助避障的接觸網支柱識別與定位系統,采用歐氏聚類和特征匹配相結合的障礙物識別算法,驗證了系統的可行性。劉俊博等[6]基于綜合檢測車搭載的激光雷達設備對鐵路邊坡表面進行形變分析,結合鐵路場景的先驗知識在完成配準后通過體素化及區域增長,實現了鐵路邊坡表面形變的量測。目前在鐵路領域中形變分析主要以車載LiDAR 采集的點云數據為主,機載LiDAR 采集的點云數據應用以制作高精度數字高程模型(Digital Elevation Model,DEM)、地形圖、橫斷面等鐵路勘測成果為主[7-10]。機載LiDAR 與車載LiDAR 采集數據的不同在于拍攝角度,車載LiDAR 以立面信息為主,而機載LiDAR 以俯視信息為主。目前機載LiDAR 在鐵路巡檢中采集的點云數據形變分析應用較少。
本文以邯長線K130+874—K135+292 區段為研究對象,基于機載LiDAR 激光點云數據,對區段內隧道洞口附近工務設備及周邊環境進行形變分析及評估,為機載LiDAR 數據在鐵路巡檢上的形變分析應用提供支撐。
1 多期形變分析原理
1.1 單期點云預處理
點云配準是通過一定的旋轉和平移變換將不同坐標系下兩組或多組點云數據統一到同一參考坐標系下[11]。形變分析的基礎是對兩期點云進行配準,由于視角和采集時間不同,采集的兩期點云可能只存在部分重合;點云是從不同時間、同一類型傳感器上獲取的,時間和視角均可能變化,會使同一三維位置附近包含噪點或異常值,影響配準結果,因此預處理階段需對點云進行裁剪、去噪。本文通過設置相同裁剪閾值的方式保證兩期點云的重合度符合要求,同時基于統計異常值濾波(Statistical Outlier Removal,SOR)算法[12]對點云數據進行去噪處理,即考慮離群點的特征,將某處點云小于某個密度的點視為無效點;對每個點進行K鄰域統計分析,假設點云中所有點的距離符合高斯分布,其密度由均值μ、標準差σ及標準差倍數m決定,大于μ+m σ的點均被視為離群點,進行濾除。
機載LiDAR 采集點云時會覆蓋目標區域外一定范圍,以滿足航線重疊度要求。基于實際關注對象及邊界點云對兩期點云重合度的影響,在選定檢測目標后,對其周邊區域設置裁剪閾值,將兩期數據在同一閾值下進行裁剪,以提高配準準確度及效率。
1.2 點云配準
在完成點云預處理后,即可對兩期點云數據進行配準。選用迭代最近點(Iterative Closest Point,ICP)算法[13]修正兩個原始點云的剛體變換(平移、旋轉),以最小化所有點集之間的距離。其本質是待配準的目標點云P和源點云Q按一定的約束條件,找到最鄰近點(pi,qi),計算出最優匹配參數R和T,使得誤差函數最小。其中,pi為待配準點云P中的一點;qi為源點云Q中與pi對應的最近點;R為旋轉矩陣;T為平移向量。誤差函數E(R,T)為
式中:n為最鄰近點對的個數。
1.3 形變分析技術
點云-點云比較(Cloud-to-Cloud Comparison,C2C)方法[14]是最經典的點云形變分析方法,不需要對點云數據進行網格化或柵格化處理,也不需要計算點云表面法線,其距離LC2C量算原理如圖1所示。C2C 方法的優點是快速形變分析,適用于檢測目標多、算法工作量大的情況;缺點是易受噪點和異常值影響,計算結果誤差相對較大。
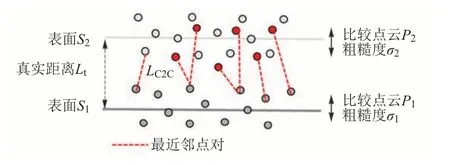
圖1 C2C方法距離量算原理示意
多尺度點云模型比較(Multiscale Model to Model Comparison,M3C2)方法[14]是近幾年被證明應用性較強的一種點云形變分析方法,其點云距離LM3C2量算原理如圖2 所示。M3C2 方法的優點是通過計算任意方向的地形變化可以估計每個形變值的置信區間;缺點是計算時間較長。M3C2 方法反映的是點的形變量,因此需要對結果進行柵格化處理,增強可視化效果。
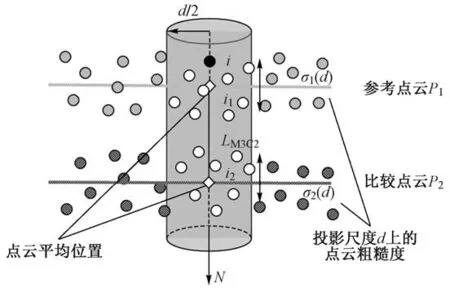
圖2 M3C2方法距離量算原理示意
考慮鐵路場景待檢測目標數量較多,本文針對工務設備及周邊環境形變分析問題,先使用C2C 方法快速發現多期點云的形變,對現場是否發生形變做定性分析;在排除數據異常導致的形變問題后,只對經過C2C 方法后發生形變的區段使用M3C2 方法進行形變定量分析;最后通過影像數據及人工現場校核驗證結果的準確性。整體技術路線如圖3所示。
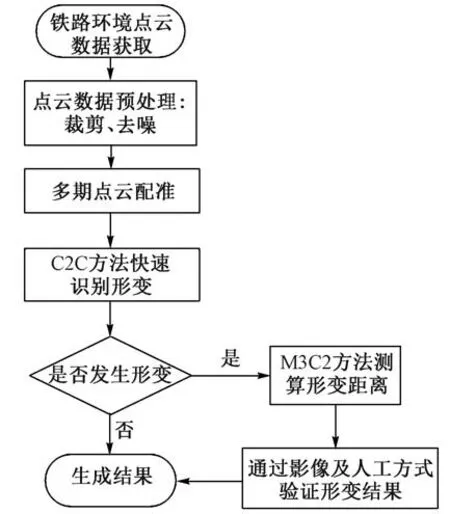
圖3 整體技術路線
2 現場應用
邯長線K130+874—K135+292 段由懸鐘至桃城,沿線共有石門隧道、靳家會隧道等6處隧道,隧道長度共計2.2 km。線路以隧道、橋梁、高路基邊坡、陡坡石質路塹為主,地形條件復雜,地質災害、路基病害多發,加之建設時間早、技術標準低,存在防洪隱患,潛在影響著鐵路運輸的安全。
2.1 機載LiDAR技術
選擇M300 無人機搭配Genius16 機載LiDAR 對區段鐵路工務設備及周邊環境進行排查。激光雷達采樣頻率320 kHz,掃描視角360° × 30°,測距精度2 cm,如圖4所示。作業航高120 m,作業模式下蜂鳥激光雷達高程誤差5 cm、平面位置誤差10 cm。綜合考慮機載LiDAR 設備特點及項目需求,該技術適用于大面積明顯形變(形變量大于10 cm)分析,能夠滿足項目需求。
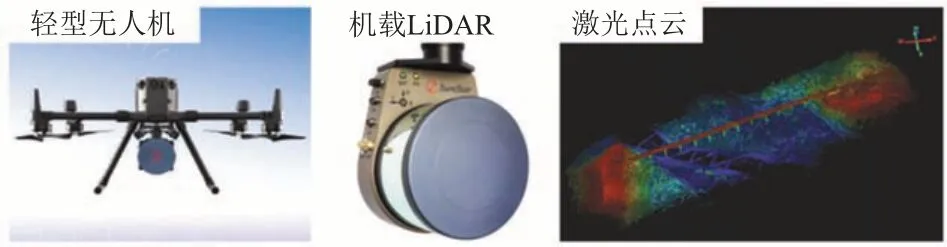
圖4 無人機機載LiDAR巡線系統
在完成現場勘察及確認飛行條件安全后,通過航線規劃設計進行現場作業。步驟為:①明確航測范圍;②確定航高,推薦航高為50~ 150 m,本次飛行選擇120 m;③航速設計,航高與航速共同影響激光雷達獲取點云的密度;④航線間距設計,按照激光雷達航帶重疊度為10%、正射影像旁向重疊度45%、航向重疊度65%進行設置;⑤按規劃完成飛行任務。
系統采集的數據主要包括機載LiDAR 點云的解析數據和影像數據兩部分。解析數據需要將GPS 同步靜態觀測數據與無人機航跡數據通過POSPac 軟件進行PPK 融合解算生成高精度的姿態軌跡數據,將軌跡數據導入StarSolve 軟件中結合激光掃描文件自動解析生成LAS 格式的點云數據;影像數據可通過對無人機的飛行軌跡進行差分解算,獲取每張圖片對應的精確坐標文件。
2.2 點云處理
在鐵路場景中,裁剪是指通過設置一定的閾值從場景點云中將待檢測對象周圍一定范圍的點云分割出來,隧道洞口裁剪效果如圖5 所示。保存裁剪使用的閾值框,多次使用以保證多期待檢測部分的點云重合。
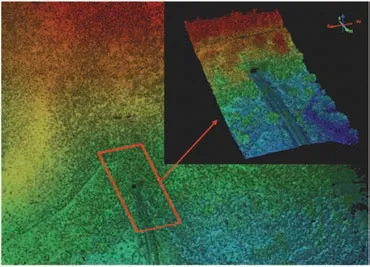
圖5 點云裁切前后
在使用SOR 算法去噪過程中,需要設置平均計算的點云數及標準差倍數兩個參數。平均計算點云數通常取6~ 12,標準差倍數m通常取1,同時不損失關鍵點信息。
用于配準的首期點云稱為參考點云,后期點云稱為待比較點云。經過ICP算法將待比較點云與參考點云進行配準,ICP 配準結果提供均方根(Root Mean Square,RMS)值及轉換矩陣參數,RMS 值越小可判斷配準效果越佳。以某隧道口為例,分別設置平均計算點云數為50 000,理論重疊度為100%,經過ICP 配準后,最終RMS 值為0.320 6,通過轉換矩陣后,能夠實現對兩期點云的快速配準。
2.3 結果分析
2.3.1 形變定性分析
為驗證形變分析方法可行性,對邯長線K130+874—K135+292 區段12 處隧道洞口的兩期機載LiDAR 點云進行分析。圖6為使用C2C 方法對某隧道口進行形變定性分析。圖中排水溝處顯示為綠色,表示該處兩期點云數據未完全重疊,即發生了形變。由于激光在水面會發生折射,造成能量損失,激光雷達無法收到經水面返回的光,從點云數據的角度,有水則不存在點云。因此無法對水溝的淤積量進行估計,只能檢測是否有淤積即是否發生形變。圖中最大形變數值1.765 m 實際約為排水溝深度。通過影像數據的定位匹配,圖7為5月份和7月份拍攝的正射影像數據,可以明顯地觀察到水溝的淤積現象。
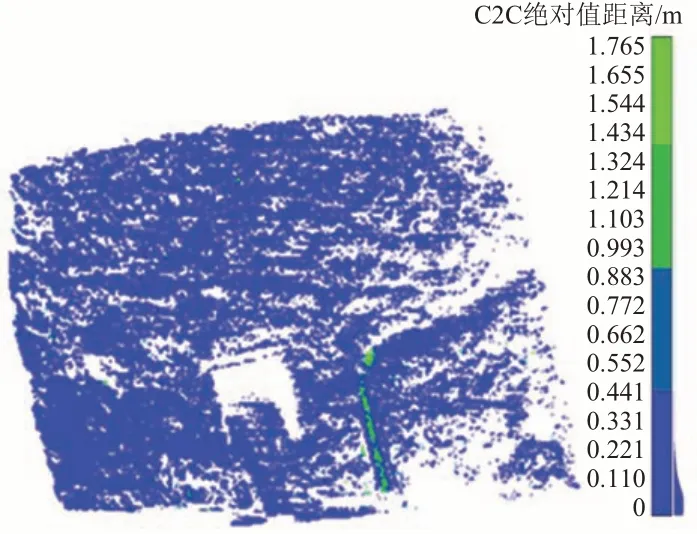
圖6 C2C方法形變分析(第一類情況)
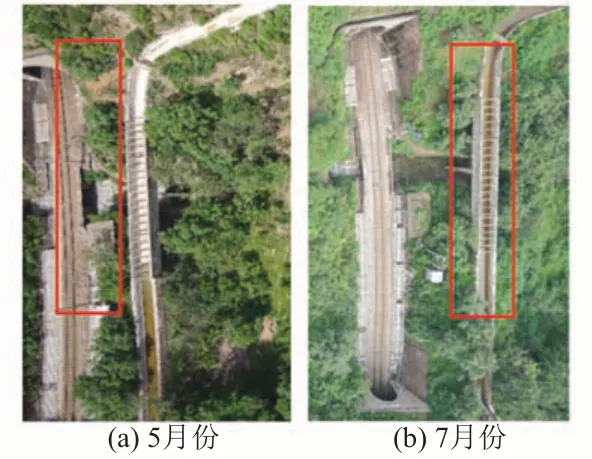
圖7 隧道洞口水溝影像數據
由于數據采集的時間、天氣條件等因素容易導致點云數據缺失,影響形變分析結果。水溝淤積也可以視為某種程度上的數據缺失。除此之外,C2C 方法對第二類形變問題的分析如圖8所示。經過C2C方法的定性分析,圖中隧道洞口處發生最大7.006 m 的形變,通過影像驗證5月份該隧道洞口前樹木生長過高已構成危樹隱患,7 月份該樹木已經過修剪排除了隱患。結合兩類不同的情況,C2C 方法能夠有效對現場是否存在形變隱患做定性判斷。
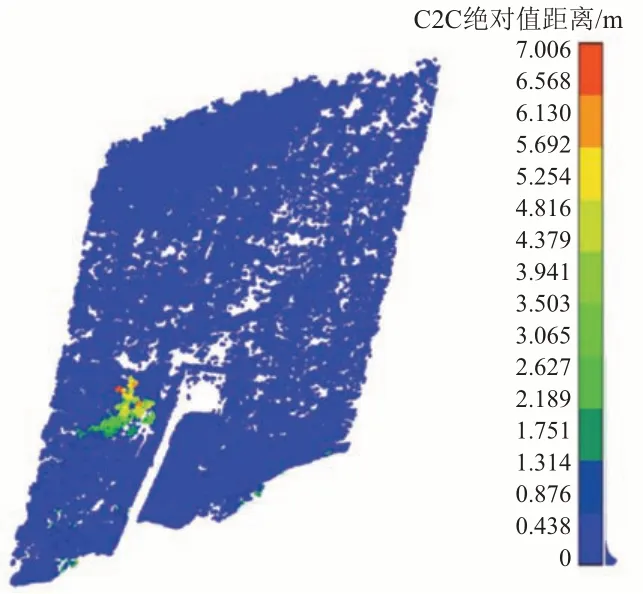
圖8 C2C方法形變分析(第二類情況)
2.3.2 形變定量分析
M3C2 方法可計算得到形變值的正負,且其值更接近實際。圖9 和圖10 分別是采用C2C 方法及M3C2方法對區段某隧道洞口旁堆土進行的形變分析。由圖9 可知:應用C2C 方法對是否發生變形進行定性分析,可以得到大致形變量為0~ 1.337 m。由圖10 可知:應用M3C2 方法可以得到待比較點云相對參考點云發生的形變的正負,其形變為-1.919~ 0.570 m。現場影像數據如圖11所示。可知:5月份線路旁有堆土,7月份堆土已經清理;5月份現場實測該區域土堆高約1.9 m。可見M3C2 方法的形變定量程度更接近于真實值。
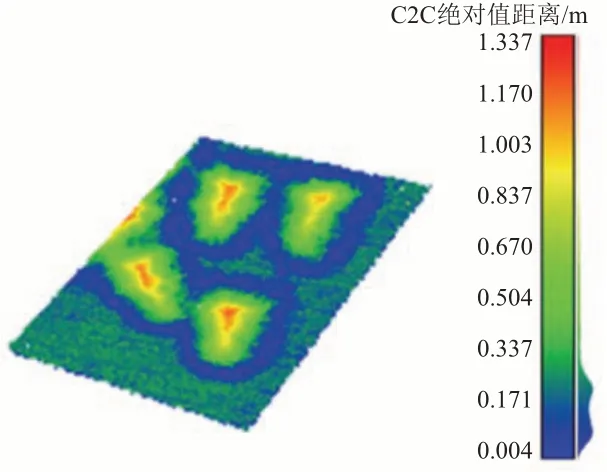
圖9 C2C方法形變分析(隧道洞口堆土情況)
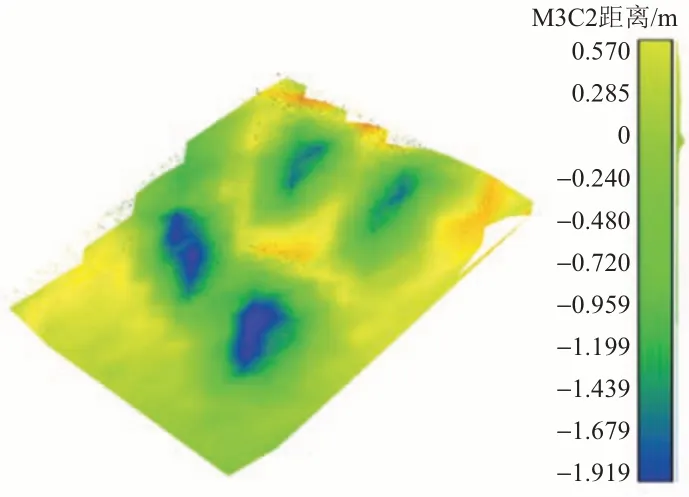
圖10 M3C2方法形變分析(隧道洞口堆土情況)

圖11 隧道洞口堆土影像數據
綜上,邯長線K130+874—K135+292 區段排水溝淤積問題較多,全線隧道排查情況見表1。可知,隧道洞口墻體等基礎設施并未發生形變。通過影像及現場人工確認,隱患已得到處理,驗證了本文的形變分析流程的可行性。
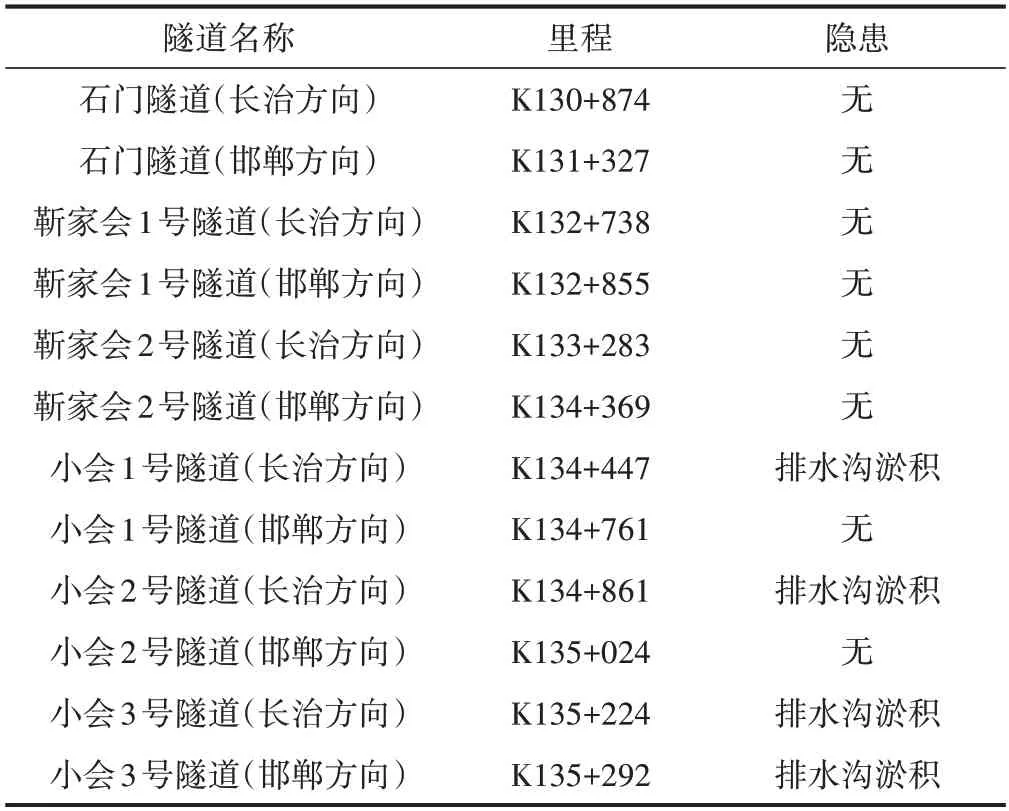
表1 隧道激光點云多期形變分析結果
3 結語
本文基于機載LiDAR 巡線系統采集的邯長線K130+874—K135+292 隧道鐵路場景點云數據,對區段內工務設備及周邊環境進行定性及定量形變分析。首先經過點云裁剪、SOR 算法去噪及ICP 配準算法處理點云;其次采取C2C 方法形變定性分析及M3C2 方法形變定量分析,及時發現隱患;最終通過影像及現場人工復核形變成因,通知現場人員排除了隱患。在鐵路工務設備及周邊環境較大規模形變的對比分析中,本文提供了一種機載LiDAR 數據應用的可行技術方法,有利于提高作業效率及點云數據利用率,降低工務設備巡檢難度,有一定的工程應用價值。
猜你喜歡
云南畫報(2021年12期)2021-03-08 00:50:54
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
鐵道通信信號(2018年7期)2018-08-29 01:17:04
山東工業技術(2016年15期)2016-12-01 05:31:22
通信電源技術(2016年4期)2016-04-04 02:58:04
Coco薇(2016年2期)2016-03-22 02:42:52
工程建設與設計(2016年3期)2016-02-27 10:50:46
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
