智能防爆巡檢機器人應用
2023-02-23 11:45:06劉雨晴
煤氣與熱力 2023年2期
關鍵詞:檢測
劉 華,路 園,劉雨晴
(1.佛山市天然氣高壓管網有限公司,廣東 佛山 528000;2.北京訊騰智慧科技股份有限公司,北京 100029)
1 概述
天然氣廠站由于其設備特征和天然氣易燃易爆的氣體特性,不可避免地存在各種安全風險,需要進行巡檢。
對于天然氣廠站的監控和巡檢,傳統方式通常采用定點安裝檢測儀表結合人工巡檢,應用四班三運轉模式,實現廠站內人員24 h值守,一班3人。因此一個廠站運維至少需要12名員工進行生產調度、事故預警、災害處置、數據記錄及臺賬管理等[1]。這一方式在實際應用中檢測效率低,檢驗方式單一,影響因素多,檢測數據分散。
應用巡檢機器人加強燃氣廠站泄漏檢測,對保障燃氣安全、推動事前預防非常必要。因此,本文針對在燃氣廠站開展智能防爆巡檢機器人(簡稱巡檢機器人)的應用研究,分析其主要構成、應用場景及應用優勢,對于提升燃氣廠站本質安全甚至應用在應急場景均有重要意義。
2 巡檢機器人結構
巡檢機器人整機采用防爆式設計,可用于Ⅱ類爆炸環境,能在-20~60 ℃環境內正常工作,能夠滿足多種工作需求。巡檢機器人整機見圖1,智能檢測云臺見圖2。巡檢機器人組成件名稱及作用如下。
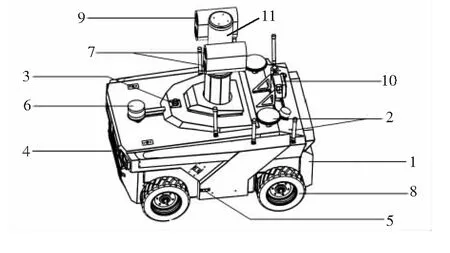
圖1 巡檢機器人整機1.防爆機箱 2.通信天線和北斗天線 3.聲光報警器、拾音器和擴音器 4.磁導航傳感器 5.激光避障傳感器 6.激光雷達 7.高清攝像頭、紅外攝像頭 8.4組驅動電機、齒輪箱和橡膠輪胎 9.激光甲烷遙測儀 10.四合一環境氣體檢測儀 11.云臺

圖2 智能檢測云臺
① 防爆機箱:將自控裝置、電池及驅動電機設置在防爆機箱中,提高工作性能的穩定性和可靠性。
② 通信天線和北斗天線:置于防爆機箱頂部,通過設置無線通信模塊和通信天線,使巡檢機器人具備無線通信功能,將巡檢信息上傳至數據采集監控平臺(簡稱監控平臺)。通過設置北斗接收模塊和北斗天線,可準確判定巡檢機器人的位置,增強了巡檢機器人的功能性和自動化程度。
③ 聲光報警器、拾音器和擴音器:置于防爆機箱頂部,拾音距離達到15 m,可通過無線音頻傳輸系統,實現與現場實時對講、遠程喊話,以達到了解現場情況、警告威懾等多種目的。
④ 磁導航傳感器:置于防爆機箱底部前側,通過測量路徑上的磁場信號獲取巡檢機器人自身相對于目標跟蹤路徑之間的位置偏差,具有很高的測量精度及良好的重復性,不易受光線變化影響。
⑤ 激光避障傳感器:置于防爆機箱四周,用于檢測巡檢機器人附近的低位置障礙物。
⑥ 激光雷達:置于防爆機箱頂部,用于在運行區域構建三維地圖,巡檢機器人運行中自主避障。
⑦ 高清攝像頭、紅外攝像頭:置于云臺連接的腔體內,對巡檢現場進行拍照或錄像,高清攝像頭拍攝實時高清圖像,紅外攝像頭拍攝紅外溫度視場圖像。
⑧ 4組驅動電機、齒輪箱和橡膠輪胎:置于防爆機箱內部和底部,使巡檢機器人具備4輪差速轉動能力,實現全向運動。
⑨ 激光甲烷遙測儀:置于云臺連接的腔體內,對關鍵位置進行泄漏檢測的非接觸式主檢測設備。
⑩ 四合一環境氣體檢測儀:置于防爆機箱頂部,可選配不同探頭進行可燃氣體(甲烷、一氧化碳、氨氣、二氧化硫等)同時在線檢測。
3 主要功能
巡檢機器人結合防爆設計、北斗定位、自動駕駛、多元數據傳感等技術于一體,實現了組合導航、多功能氣體檢測、數據采集監控等。
3.1 組合導航
巡檢機器人融入磁導航傳感器、激光雷達、北斗天線等,以北斗系統高精度定位導航能力為依托,實現大地坐標系內精準定位定向,同時結合高精度慣導、激光雷達同時定位與建圖(Simultaneous Localization and Mapping,SLAM)導航,實現cm級精準定位和均方根0.4°定向,并支持路線規劃和任務調度功能。北斗組合導航原理見圖3。
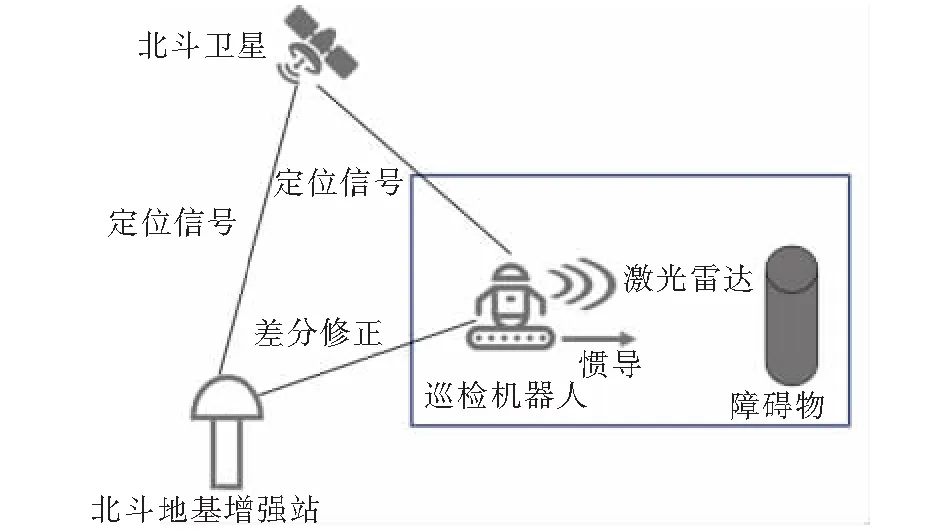
圖3 北斗組合導航原理
巡檢機器人根據北斗衛星和附近的北斗地基增強站獲得高精度的定位定向,結合自身裝備的激光雷達在現場掃描建圖,不僅能夠執行固定線路的巡檢任務,自動躲避線路上障礙物,還可執行臨時性應急任務,擴展了巡檢機器人的應用場景支持能力。
3.2 多功能氣體檢測
巡檢機器人搭載激光甲烷遙測儀及四合一環境氣體檢測儀。激光甲烷遙測儀可隨云臺動態檢測,精度高、距離遠、響應快,是對關鍵位置進行泄漏檢測的非接觸式主檢測設備。激光甲烷遙測儀參數見表1。
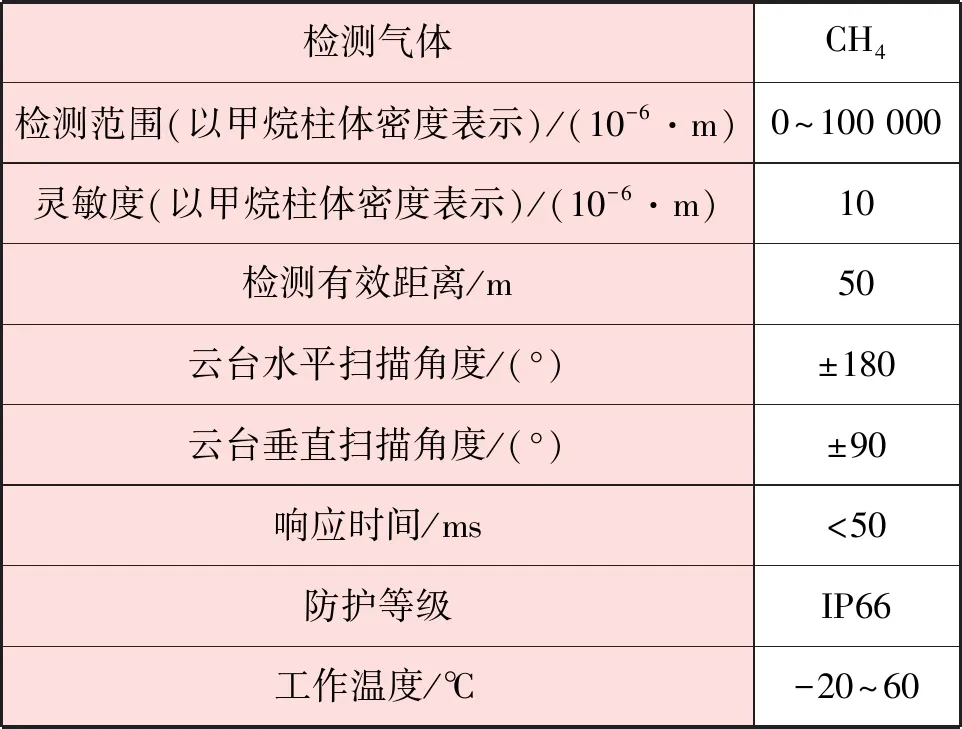
表1 激光甲烷遙測儀參數
四合一環境氣體檢測儀采用車載固定式安裝,可選配不同傳感器實現可燃氣體(甲烷、一氧化碳、氨氣、二氧化硫等)同時檢測,響應時間不超過30 s。檢測精度±3%,視具體傳感器而定。能同時保存500個事件數據,并且具有數據恢復功能。除檢測氣體之外,能夠同時實時采集環境溫度和濕度。四合一環境氣體檢測儀見圖4。
激光甲烷遙測儀及四合一環境氣體檢測儀結合使用,可提升巡檢機器人的檢測質效,適配多場景多需求氣體檢測。

圖4 四合一環境氣體檢測儀
3.3 數據采集監控
巡檢機器人所采集的數據,可通過監控平臺展示、存儲,同時可通過監控平臺控制巡檢機器人。監控平臺提供標準數據接口,可對接SCADA系統、生產運行監控系統。監控平臺界面見圖5。
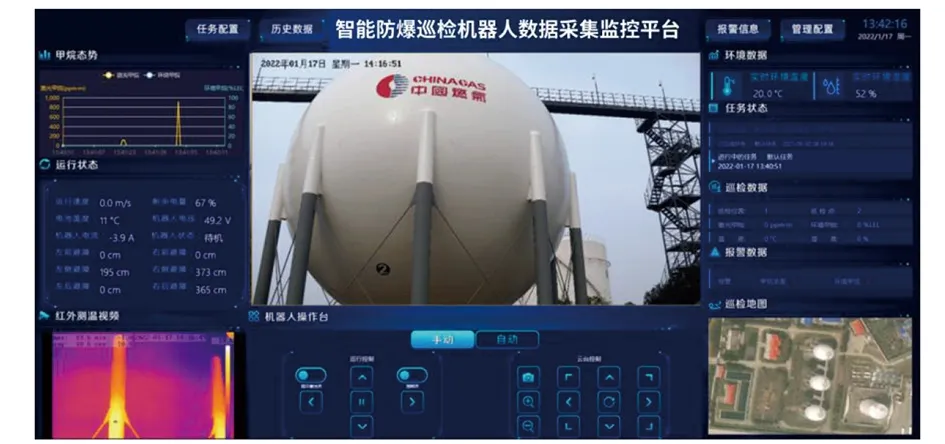
圖5 監控平臺界面
監控平臺可實現數據采集、實時監控。監控平臺可實時獲取現場設備可見光圖像、紅外圖像、設備噪聲等信息,支持視頻播放、停止、抓圖、錄像、全屏顯示,實時監控巡檢機器人自身狀態。
監控平臺可實現任務下達、自主篩選。通過監控平臺,工作人員可對巡檢機器人進行任務調整、下發,能夠對現場實時采集的巡檢信息進行自動化篩選處理。
監控平臺可實現數據追溯、輔助決策。監控平臺具有多維度、多層次歷史巡檢數據追溯能力,業務數據與位置、時間緊密關聯,通過監控平臺,可以生成豐富的現場圖像和數據報表,輔助工作人員進行決策分析。
4 應用優勢
① 提升巡檢質量
巡檢機器人集合了多項先進技術以及防爆功能,在工作中降低人為誤差,且可以保障本體安全。在巡檢過程中可以選擇磁導航自動巡檢以及自定義道路巡檢,既可以完成周期性自動化任務,保障固定巡檢區域燃氣安全,又可以通過控制巡檢機器人對設備存在的故障或者異常點位進行確認,全方位提升巡檢質量。
② 提高巡檢效率
巡檢機器人的應用提高了巡檢效率。以天津塘沽燃氣門站為例,實際測試巡檢機器人24 h可巡檢38次,人工巡檢受制于環境、管理、人為等各種因素,24 h可以巡檢2次[2]。巡檢效率提升可以增大對環境巡檢的次數,進一步加強泄漏檢測力度。
③ 數據精準安全
搭載北斗衛星精準定位導航的巡檢機器人,在廠站內能夠快速建模和實現cm級的精準定位,并保障數據安全。廠站設有大量燃氣管道,如果檢查到燃氣泄漏,巡檢機器人可進行精準定位并上報。
5 應用場景展望
目前,巡檢機器人在燃氣廠站逐漸得到應用,通過持續的應用探索和不斷的系統更新,拓展了更多巡檢機器人應用場景。
5.1 日常巡檢
巡檢機器人配置多種高精度傳感器,實現數據采集分析和預警等功能。可以在易燃易爆危險環境中工作,輔助作業人員完成巡檢任務,降低安全風險和勞動強度。巡檢機器人日常巡檢見圖6。

圖6 巡檢機器人日常巡檢
5.2 現場看護
當燃氣廠站、輸氣管道周圍臨時施工時,通過監控平臺可遠程調度巡檢機器人根據北斗定位信息導航行駛至施工現場,遠程喊話、記錄施工工作流程,實時檢測氣體濃度、獲取環境溫濕度信息,一旦可燃氣體濃度過高,立即報警提示。還支持對運行異常的設備儀表進行定點看護,遠程傳輸其運行的視頻數據、抓拍圖像。
5.3 應急偵測
一旦燃氣廠站內或輸氣管道周圍發生氣體泄漏,巡檢機器人可根據應急地點的北斗定位信息到達指定位置,深入搶險一線,代替人員先期進入易燃易爆應急現場探明情況,獲取現場音視頻、氣體濃度、環境溫濕度。實現應急現場多維環境數據統一時空采集處理、實時傳輸和即時融合展現,應急指揮中心可根據巡檢機器人回傳的數據進行分析,制定應急方案,有序處置,降低了應急人員的風險。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
