無人機(jī)不同航線規(guī)劃方案下露天礦山三維建模對比研究
2023-02-23 07:52:18張艷博路恒驍姚旭龍于光遠(yuǎn)
金屬礦山 2023年1期
張艷博 路恒驍 梁 鵬 姚旭龍 李 群 于光遠(yuǎn) 李 華
(1.華北理工大學(xué)礦業(yè)工程學(xué)院,河北 唐山 063210;2.河北省礦山綠色智能開采技術(shù)創(chuàng)新中心,河北 唐山 063210;3.河北鋼鐵集團(tuán)灤縣司家營鐵礦有限公司,河北 唐山 063701)
露天礦山邊坡地形落差較大、環(huán)境復(fù)雜,在礦山生產(chǎn)作業(yè)過程中常伴有滑坡、崩塌等災(zāi)害發(fā)生,嚴(yán)重影響了工作人員的生命安全以及礦山的生產(chǎn)效益[1]。對露天礦山滑坡、崩塌災(zāi)害進(jìn)行快速精準(zhǔn)定位,并對滑坡體和崩塌體的各特征要素信息進(jìn)行安全、高效勘測,對于邊坡災(zāi)害成因分析和災(zāi)害發(fā)展趨勢預(yù)測具有重要意義[2]。
無人機(jī)攝影測量技術(shù)以其高效率、低成本、安全可靠的優(yōu)勢,被廣泛應(yīng)用于各類災(zāi)害監(jiān)測中[3-5]。基于無人機(jī)攝影測量技術(shù)構(gòu)建露天礦山三維模型,可以高效地獲取滑坡體和崩塌體的各項(xiàng)特征信息,能夠有效克服露天礦山中傳統(tǒng)滑坡監(jiān)測手段存在的影像獲取時(shí)效性差、分辨率低、無法對邊坡進(jìn)行長期監(jiān)測的不足[6-8]。露天礦山三維模型精度影響邊坡災(zāi)害監(jiān)測效果,然而不同的無人機(jī)航線規(guī)劃方案直接影響了露天礦山三維建模精度,因此無人機(jī)航線規(guī)劃是進(jìn)行露天礦山無人機(jī)攝影測量的重點(diǎn)工作[9-10]。
目前,無人機(jī)攝影測量作業(yè)常采用的航線規(guī)劃方案為定高“之”字航線和定高“井”字航線[11-13]。然而對于大型露天礦山區(qū)域,采用傳統(tǒng)的定高航線飛行方案存在的不足在于:首先由于露天礦山地形落差較大,飛行高度受到限制,會(huì)增加無人機(jī)撞到礦山邊坡的風(fēng)險(xiǎn);其次由于露天礦山地形起伏較大,無人機(jī)相對實(shí)際地面的高度不同,造成地面分辨率相差較大,從而影響建模精度[14-15]。仿地飛行是指無人機(jī)在作業(yè)過程中,飛機(jī)航高隨地形起伏不斷變換,并始終與三維地形保持恒定的高差。本研究以河北省唐山市司家營露天礦山為試驗(yàn)區(qū)域,利用大疆精靈4 RTK無人機(jī),采用仿地“之”字航線規(guī)劃方案,結(jié)合傳統(tǒng)定高“之”字航線和定高“井”字航線規(guī)劃方案,對3種不同航線規(guī)劃方案獲得的礦山三維模型進(jìn)行對比分析。
1 研究區(qū)概況及技術(shù)路線
1.1 研究區(qū)概況
研究區(qū)位于河北省灤州市境內(nèi)的司家營露天礦山,礦山邊坡地形落差較大,地勢險(xiǎn)峻。礦體賦存于單斜構(gòu)造中,東幫順傾,西幫反傾,近年來發(fā)生了多處不同規(guī)模的滑坡、崩塌事故,邊坡穩(wěn)定性問題嚴(yán)重。礦山最大高差可達(dá)250 m,礦坑南北長6 km,東西長2 km,研究區(qū)具體位置如圖1所示。
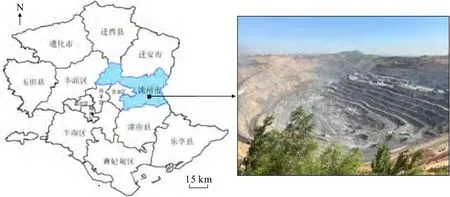
圖1 唐山市研究區(qū)所處位置Fig.1 Location of the study area in Tangshan City
1.2 技術(shù)路線
為了獲取高精度的露天礦山三維模型,結(jié)合研究區(qū)復(fù)雜的地形、自然環(huán)境,首先制定了定高“之”字航線、“井”字航線和仿地“之”字航線3種航線規(guī)劃方案;其次使用大疆精靈4RTK四旋翼無人機(jī)獲取露天礦山影像數(shù)據(jù),通過數(shù)據(jù)處理獲取露天礦山三維模型;進(jìn)而在三維模型上獲取地面檢測點(diǎn)坐標(biāo)與GNSS RTK獲取的地面檢測點(diǎn)坐標(biāo)信息進(jìn)行對比;最后通過三維模型的完整性和地面檢測點(diǎn)測量誤差對3種航線規(guī)劃方案進(jìn)行定性、定量分析。本研究技術(shù)路線如圖2所示。
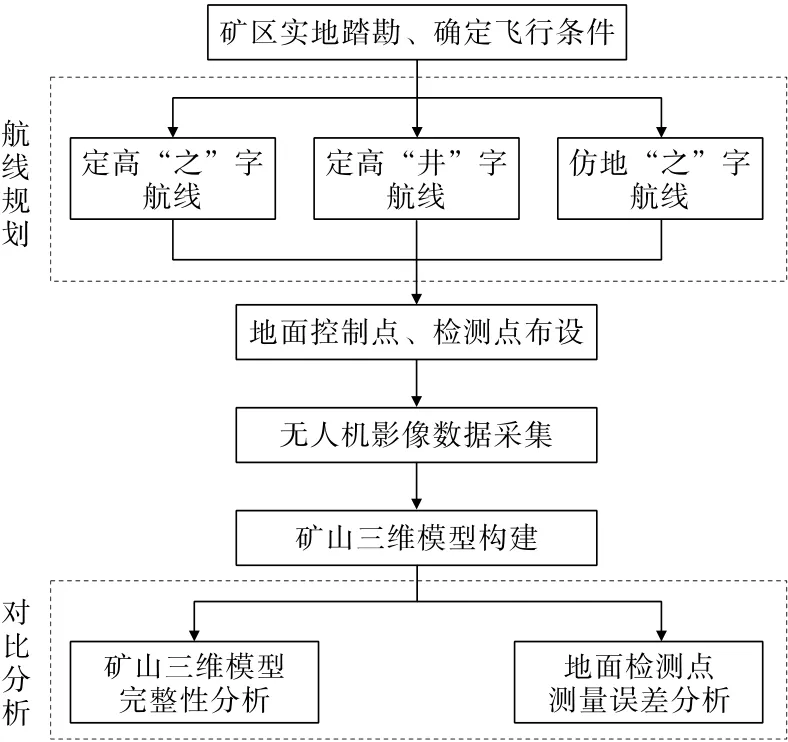
圖2 技術(shù)路線Fig.2 Technical route
2 無人機(jī)航線設(shè)計(jì)及數(shù)據(jù)采集
2.1 無人機(jī)航線設(shè)計(jì)
2.1.1 定高“之”字和“井”字航線設(shè)計(jì)
定高“之”字航線整體呈“之”字形,航線位于測區(qū)正上方固定高度處,航線布設(shè)方案較為簡單,工作量小,可以短時(shí)間獲取測區(qū)影像數(shù)據(jù)。設(shè)置鏡頭傾角為-60°,航向重疊度為80%,旁向重疊度為60%,航高為120 m,實(shí)現(xiàn)礦山影像數(shù)據(jù)的獲取,該航線能極大地減少數(shù)據(jù)冗余問題。定高“之”字航線規(guī)劃方案如圖3(a)所示。定高“井”字航線是以“之”字航線為基礎(chǔ),通過水平和垂直兩個(gè)航線垂直疊加,構(gòu)成“井”字航線。設(shè)置鏡頭傾角為-60°,航向重疊度為80%,旁向重疊度為60%,航高為120 m,鏡頭位置平行于主航線,通過單鏡頭相機(jī)獲取多方位的礦山影像數(shù)據(jù)。定高“井”字航線規(guī)劃方案如圖3(b)所示。
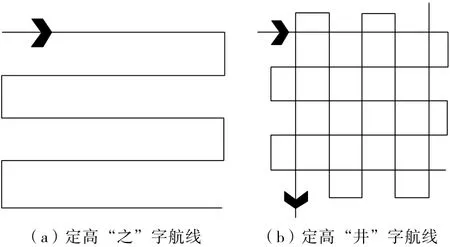
圖3 兩種無人機(jī)航線設(shè)計(jì)Fig.3 Design of the two routes of UAV
2.1.2 仿地“之”字航線設(shè)計(jì)
借助仿地飛行功能,無人機(jī)能夠適應(yīng)不同的地形,根據(jù)測區(qū)地形自動(dòng)生成變高航線,保持地面分辨率一致,從而獲得更好的數(shù)據(jù)效果。仿地航線如圖4所示。
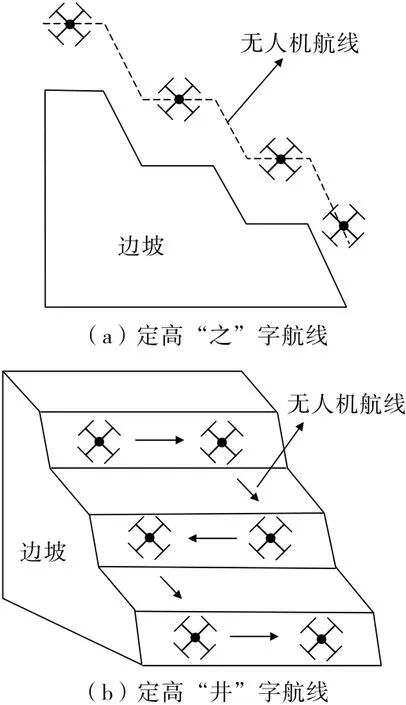
圖4 無人機(jī)仿地航線示意Fig.4 Schematic of the imitation ground route of UAV
采用基于DSM信息設(shè)計(jì)仿地飛行航線方案,使無人機(jī)始終與地面保持固定高度,來獲取露天礦山影像數(shù)據(jù)并建立礦山三維模型。為獲得礦區(qū)DSM信息,首先對礦區(qū)進(jìn)行快速預(yù)掃飛行。為防止無人機(jī)飛行過程中誤撞礦山邊坡,選擇礦區(qū)海拔最高點(diǎn)為起飛點(diǎn),設(shè)置航高150 m,按照正射航線規(guī)劃進(jìn)行飛行。獲取影像數(shù)據(jù)后經(jīng)過內(nèi)業(yè)處理生成DSM。
目前,無人機(jī)傾斜攝影測量處理最常用的軟件為Pix4Dmapper和Smart 3D,這兩款軟件均能生成DSM,相較于Smart3D,Pix4Dmapper軟件效率更高。因此,本研究采用Pix4Dmapper軟件按照1 m的分辨率生成DSM文件用作仿地飛行底圖,構(gòu)建的數(shù)字表面模型(DSM)如圖5所示。在此基礎(chǔ)上設(shè)置仿地航線方案,鏡頭傾角為-60°,航向重疊度為80%,旁向重疊度為60%,航高為120 m。
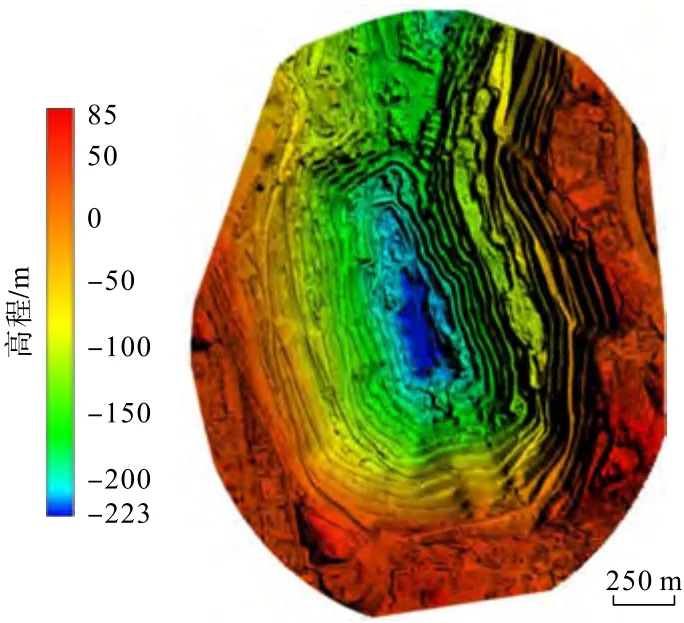
圖5 研究區(qū)DSMFig.5 DSM for the mining area
2.2 數(shù)據(jù)采集
選用大疆精靈4 RTK無人機(jī)(圖6)進(jìn)行數(shù)據(jù)采集,該型無人機(jī)集成全新RTK模塊,具有更強(qiáng)大的抗磁干擾能力與精準(zhǔn)定位能力,同時(shí)攜帶1英寸2 000萬像素CMOS傳感器,可以捕捉高清影像。

圖6 大疆精靈4RTK無人機(jī)Fig.6 DJI Phantom 4 RTK
使用DJ GS RTK航線規(guī)劃軟件可以實(shí)現(xiàn)定高“之”字航線和“井”字航線的規(guī)劃。本研究選擇礦山最高處平臺(tái)為起飛點(diǎn),因礦山范圍較大,綜合考慮作業(yè)時(shí)長和作業(yè)精度設(shè)置相對起飛點(diǎn)固定高度120 m的航高,進(jìn)而進(jìn)行影像數(shù)據(jù)采集。規(guī)劃設(shè)計(jì)仿地“之”字航線時(shí),首先在礦區(qū)內(nèi)采用2D正射方法快速采集數(shù)據(jù),但對于地形落差較大的區(qū)域,首次飛行時(shí)要特別注意安全問題,盡量選擇地形高處為起飛點(diǎn),設(shè)置安全航高,保證無人機(jī)能夠安全作業(yè);然后利用Pix4D等空三軟件,將2D正射方法采集的數(shù)據(jù)生成礦山DSM,并將DSM兩個(gè)文件(tif和tfw)導(dǎo)入遙控器中;最后根據(jù)DSM生成仿地“之”字航線,設(shè)置仿地飛行高度120 m,相機(jī)傾角-60°,航向重疊度為80%,旁向重疊度為60%。
因大疆精靈4 RTK無人機(jī)自帶RTK模塊,因而選擇免像控方案獲取露天礦山影像數(shù)據(jù)。但是由于原始的POS信息中的高程信息為橢球高(即大地高),而所需要的成果坐標(biāo)系的高程系統(tǒng)為正常高。對于整個(gè)參考橢球來說,不同區(qū)域的高程異常是不同的。但是,對于局部范圍來說,其高程異常往往只有不到毫米級的變化,所以本研究布設(shè)1個(gè)控制點(diǎn)來獲取高程改正值,對原始模型施加高程改正值獲取模型正確的三維坐標(biāo)。為了進(jìn)一步驗(yàn)證不同航線規(guī)劃方案下露天礦山三維模型的精度,在布設(shè)地面控制點(diǎn)的同時(shí)布設(shè)了15個(gè)地面檢測點(diǎn),地面檢測點(diǎn)布設(shè)如圖7所示。
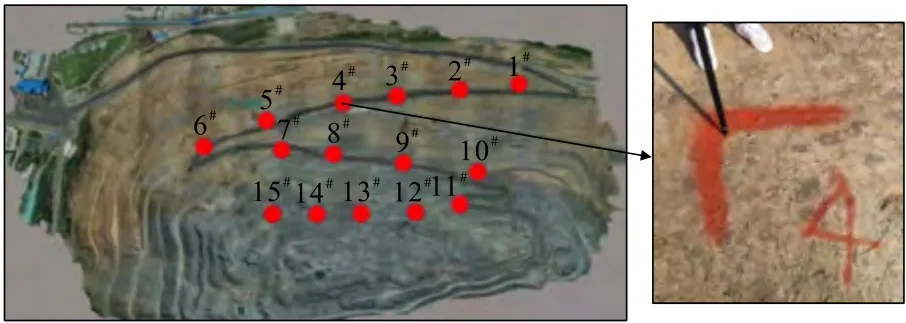
圖7 地面檢測點(diǎn)布設(shè)Fig.7 Layout of the ground points
采用GNSS RTK對地面檢測點(diǎn)進(jìn)行測量,獲取地面檢測點(diǎn)在CGCS2000坐標(biāo)系下的三維坐標(biāo),結(jié)果見表1。在無人機(jī)低空航測所建露天礦山三維模型上對檢測點(diǎn)進(jìn)行測量,獲取其三維坐標(biāo)信息,并與GNSS RTK獲取的檢測點(diǎn)三維坐標(biāo)信息進(jìn)行對比,從而分析所構(gòu)建的露天礦山三維模型的精度。
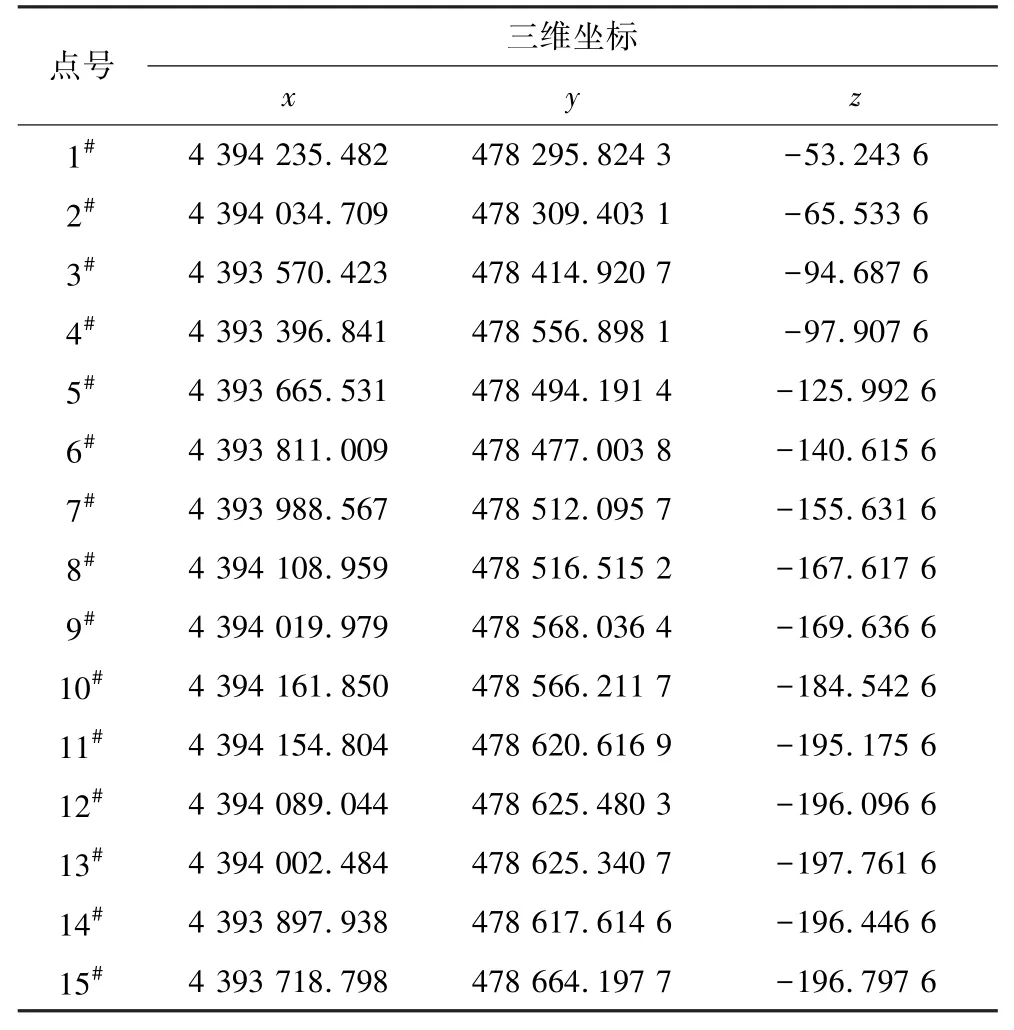
表1 地面檢測點(diǎn)CGCS2000坐標(biāo)系坐標(biāo)Table 1 Coordinates of the ground detection points in CGCS2000 coordinate system m
3 無人機(jī)航線規(guī)劃方案對比分析
3.1 三維模型完整性分析
針對不同航線規(guī)劃方案獲取的露天礦山三維模型,分別從整體和局部兩方面對模型紋理細(xì)節(jié)和變形程度進(jìn)行對比分析。不同航線規(guī)劃方案下的露天礦山三維模型如圖8所示。整體而言,不同航線規(guī)劃方案獲取的露天礦山三維模型均較為完整,并未出現(xiàn)空洞現(xiàn)象,能較好地重現(xiàn)露天礦山。就地面分辨率(GSD)而言,定高航線GSD在露天礦山最高處為3.33 cm,在露天礦山最低處為9.53 cm。而仿地航線可以實(shí)現(xiàn)任何區(qū)域的地面分辨率為3.33 cm。就整體的紋理細(xì)節(jié)而言,基于仿地“之”字航線獲取的模型,其露天礦山邊坡細(xì)節(jié)更加明顯,邊坡輪廓更為明顯。對于巖層,色彩效果更加明顯,更能輕易、快速地通過目視判讀進(jìn)行識別。
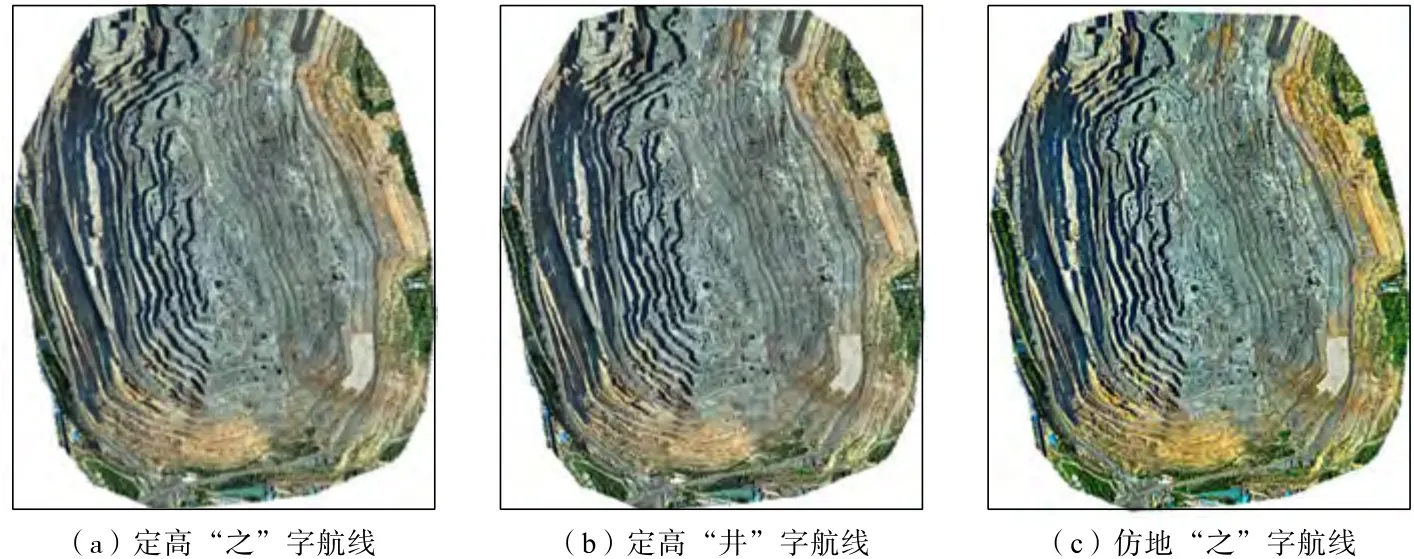
圖8 礦山整體三維模型Fig.8 Overall 3D models of the mine
如圖9所示的模型局部而言,對于地面工作車輛和巖體細(xì)節(jié)可明顯看出,定高“之”字航線和“井”字航線下的三維模型,地面信息模糊、工作車輛發(fā)生明顯變形。采用仿地“之”字航線,地面細(xì)節(jié)信息,且地面工作車輛并未出現(xiàn)明顯變形,邊坡巖體細(xì)節(jié)明顯更為凸出。

圖9 礦山局部三維模型Fig.9 Local 3D models of the mine
邊坡巖體細(xì)節(jié)如圖10所示。采用定高“之”字航線,邊坡巖體細(xì)節(jié)較差,巖體上凸出部分出現(xiàn)明顯平滑、變形現(xiàn)象;采用定高“井”字航線,邊坡巖體細(xì)節(jié)優(yōu)于定高“之”字航線,但也存在明顯的平滑、變形現(xiàn)象;采用仿地“之”字航線,邊坡巖體細(xì)節(jié)明顯,優(yōu)于定高“井”字和定高“之”字航線規(guī)劃方案,變形情況大幅度減少,能有效識別出邊坡凸出巖體。
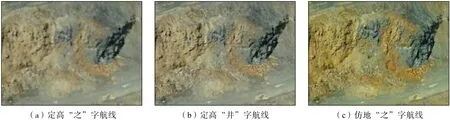
圖10 礦山邊坡巖體三維模型Fig.10 3D models of slope rock mass of the mine
3.2 三維模型精度分析
采用GNSS RTK對露天礦山東幫處布設(shè)的15個(gè)地面檢測點(diǎn)進(jìn)行測量,獲取了各點(diǎn)位的三維坐標(biāo)。在露天礦山三維模型上對檢測點(diǎn)進(jìn)行量取,進(jìn)而與GNSS RTK實(shí)際測量坐標(biāo)進(jìn)行對比,從而分析三維礦山模型精度。目前,無人機(jī)航空攝影測量中廣泛使用均方根誤差(RMSE)進(jìn)行航測成果精度評定,其主要是通過提前設(shè)置的地面檢測點(diǎn)進(jìn)行對比評估。具體而言,基于露天礦山三維模型,識別出各檢測點(diǎn)并提取其三維坐標(biāo)(x,y,z),并與GNSS RTK測量值(xRTK,yRTK,zRTK)進(jìn)行對比,得到相應(yīng)的均方根誤差[16],相關(guān)計(jì)算公式為
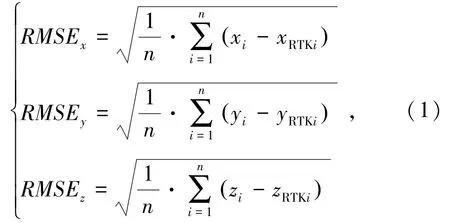
式中,RMSEx、RMSEy、RMSEz為檢測點(diǎn)的均方根誤差;n為檢測點(diǎn)數(shù)量;xi、yi、zi分別為檢測點(diǎn)i(1≤i≤n)的模型測量值;xRTKi、yRTKi、zRTKi為檢測點(diǎn)i(1≤i≤n)的坐標(biāo)實(shí)測值。
航測成果全局的平面均方根誤差(RMSEH)、高程均方根誤差(RMSEV)和三維均方根誤差(RMSE3D)可分別進(jìn)行如下計(jì)算:

不同航線規(guī)劃方案下檢測點(diǎn)測量的均方根誤差見表2。定高“之”字航線、定高“井”字航線和仿地“之”字航線規(guī)劃方案對應(yīng)的露天礦山三維模型的全局均方根誤差分布如圖11所示。
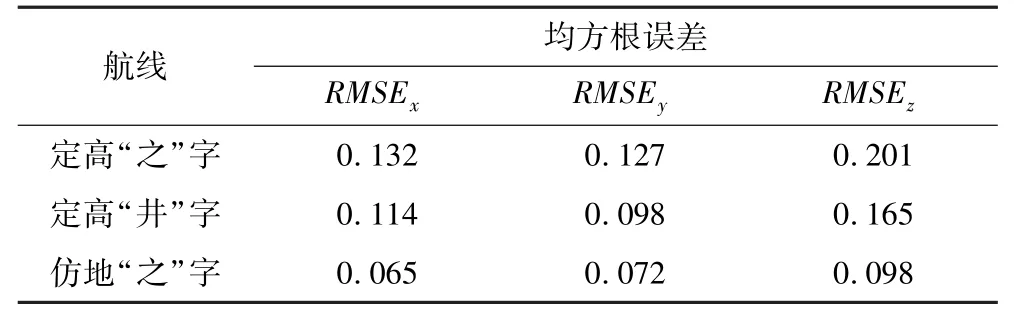
表2 檢測點(diǎn)均方根誤差Table 2 Root mean square errors of check pointsm
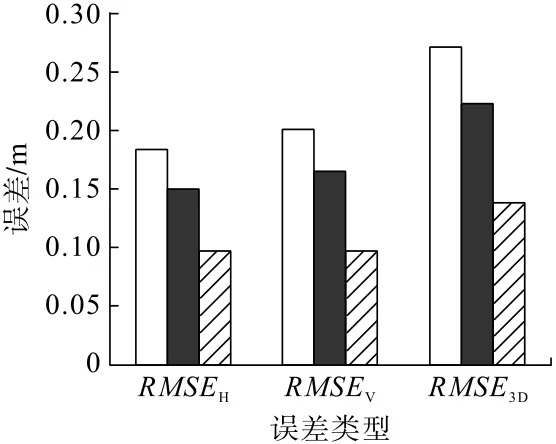
圖11 全局均方根誤差分布直方圖Fig.11 Distribution histogram of the global root mean square error
由表2、圖11可知,在全局平面均方根誤差方面:定高“之”字航線(0.183 m)>定高“井”字航線(0.150 m)>仿地“之”字航線(0.097 m);在全局高程均方根誤差方面:定高“之”字航線(0.201 m)>定高“井”字航線(0.165 m)>仿地“之”字航線(0.098 m);在全局三維均方根誤差方面:定高“之”字航線(0.272 m)>定高“井”字航線(0.223 m)>仿地“之”字航線(0.138 m)。可見,定高“之”字航線規(guī)劃方案獲取的露天礦山三維模型誤差最大、精度最低,仿地“之”字航線規(guī)劃方案獲取的露天礦山三維模型誤差最小、精度最高。從全局三維精度來看,仿地“之”字航線所得礦山三維模型精度相對于定高“之”字航線提升了49%,相對定高“井”字航線提升了38%。因此可知,在地形起伏、落差較大的露天礦山區(qū)域,采用仿地“之”字航線規(guī)劃方案進(jìn)行無人機(jī)低空航測,可以獲得精度更高的礦山三維模型。
無論是從三維模型的完整性方面還是精度方面分析,通過仿地“之”字航線獲取的露天礦山三維模型,都比傳統(tǒng)定高“之”字和“井”字航線獲取的露天礦山三維模型質(zhì)量更好、精度更高。需要指出的是,仿地飛行航線需要預(yù)先快速預(yù)掃,獲取測區(qū)的基礎(chǔ)地形高程信息,增加了一定的工作量。此外,由于露天礦山邊坡臺(tái)階標(biāo)高變化劇烈,需要無人機(jī)頻繁進(jìn)行飛行高度調(diào)整,仿地航線飛行導(dǎo)致航速較慢,可能影響作業(yè)效率。因此,在測量精度要求較高、而作業(yè)效率不作過高要求時(shí),仿地航線是利用無人機(jī)進(jìn)行礦山三維建模的最優(yōu)方案。
4 結(jié) 論
本研究采用仿地“之”字飛行航線,結(jié)合傳統(tǒng)定高“之”字航線和“井”字航線,獲取不同航線規(guī)劃方案下的露天礦山三維模型,并通過模型完整性及地面檢測點(diǎn)的測量誤差進(jìn)行了對比分析。主要結(jié)論如下:
(1)基于無人機(jī)低空攝影測量技術(shù),采用定高“之”字航線、“井”字航線及仿地“之”字航線規(guī)劃方案均能獲取露天礦山的完整三維模型,進(jìn)而可以高效地獲取露天礦山地形信息。
(2)在模型質(zhì)量方面,采用仿地“之”字航線獲得的露天礦山三維模型在紋理、細(xì)節(jié)、顏色和信息的豐富度方面,均優(yōu)于定高“之”字和“井”字航線規(guī)劃方案獲取的礦山三維模型。在模型精度方面,通過地面檢測點(diǎn)測量分析可知,仿地“之”字航線規(guī)劃方案獲取礦山模型的全局均方根誤差最低、精度最高。
(3)在測量精度要求較高、而作業(yè)效率不作過高要求時(shí),相比于傳統(tǒng)定高“之”字航線和“井”字航線,仿地航線是在地形起伏、落差較大的露天礦山區(qū)域進(jìn)行無人機(jī)三維建模的最優(yōu)航線規(guī)劃方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
