三維激光掃描儀在高速鐵路軌道線形測量中的應用
2023-02-19 09:32:18何思源
鐵道勘察 2023年1期
何思源
(中鐵第一勘察設計院集團有限公司,西安 710043)
引言
三維激光掃描測量技術通過激光快速掃描,可以自動、連續、快速地獲取目標物體表面的采樣點數據,并以點云形式表現目標物體表面的幾何特征。
目前我國高速鐵路投入運營后在部分區段出現了鋼軌波磨現象。高速鐵路鋼軌波磨不但導致了車輛軌道結構高頻振動,而且還對車輛運行安全產生隱患[14]。針對上述問題,探討了將三維激光掃描儀應用于軌道線性測量,采用后方交會CPⅢ坐標進行自由設站確定儀器中心坐標,進而獲取物體表明三維坐標的方法。以期實現一測多用,提高工作效率及數據利用率,為掃描儀用于軌道線形測量提供技術支持。
1 三維激光軌道線形掃描方法
MS60高速影像全站掃描儀基于Leica MergeTEC技術,高度集成三維激光掃描技術、超高精度測量技術、數字影像技術,GNSS技術,掃描速度最高可達30000點/s,掃描精度可達 0.6 mm@50m。MS60相關技術參數見表1。
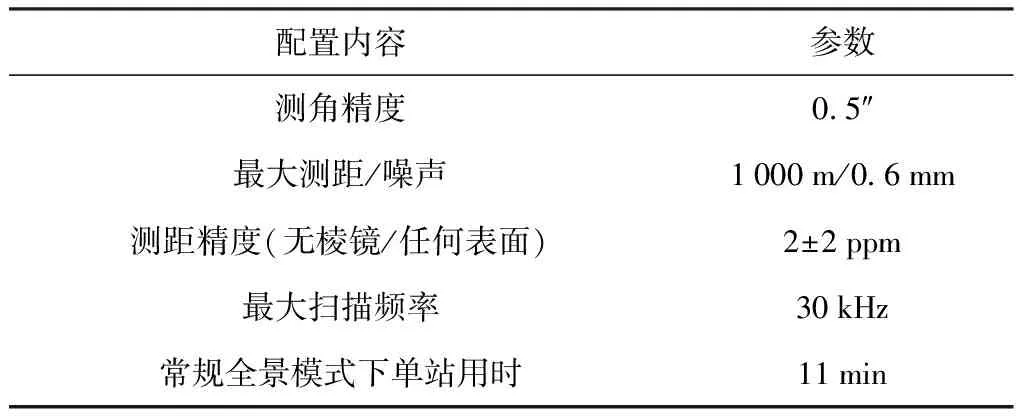
表1 MS60掃描儀技術參數
基于后方交會自由測站的MS60掃描儀作業示意見圖1,掃描儀整平后置于軌道一側,提前導入最新CPⅢ復測成果,測量均勻分布于測站前后的8個CPⅢ控制點,計算并查看設站精度是否滿足X,Y,H三個方向的設站精度要求小于0.7 mm,設站掃描參數:掃描模式設置為30 kHz/30 000點,點云水平夾角45″,豎直夾角13″。設置完成后開始掃描作業,為保證點云密度,設站間距為40 m。對于雙線軌道,掃描線路呈“Z”形布設,對于單線軌道掃描儀,置于鋼軌中間即可。
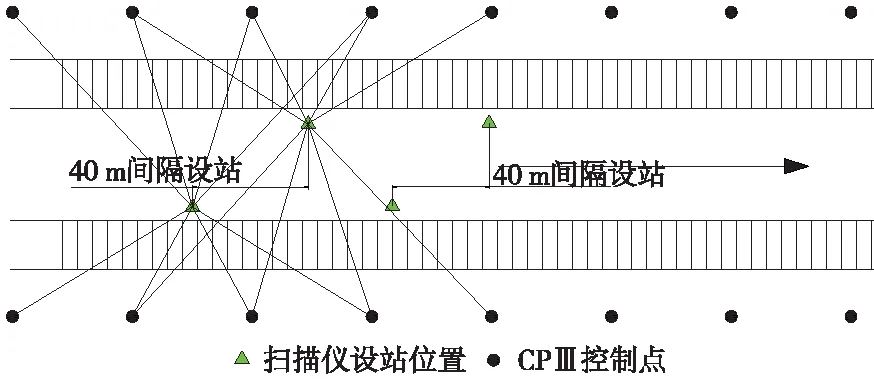
圖1 MS60掃描儀設站作業示意
2 精度分析
2.1 點云平面坐標精度推算
參考高速鐵路工程測量規范中相關要求:全站儀自由設站半測回觀測4對CPⅢ控制點后,自由設站點的X方向不確定度為ux=0.7 mm、Y方向不確定度為uy=0.7 mm[15],則自由設站點平面不確定度為
(1)
極坐標測量中,引入的標準不確定度分量u2,掃描工作開始時,可以認為全站儀采用極坐標法采用免棱鏡模式測量構筑物點坐標[16],則任一點云平面坐標為
(2)
式中,S為設站點A至P點的水平距離;α為定向角;αp為水平方向觀測值。則激光掃描點的不確定度為
人們可問的一個基本問題是:基于射線的方法足以模擬廣角反射/折射數據嗎?答案并非直截了當。它依賴于我們對由廣角反射/折射數據得到的模型的解譯能力。地質學家們面對廣角反射/折射數據得到的模型有時也會感到迷惑。在地表或近地表的地質觀測中推斷出的殼體和斷層在這一模型中幾乎很難被識別出來(如,圣十字山中的維索戈瑞和凱爾采單元,見Malinowski et al,2005)。這是因為不同年代和起源的地殼單元可能顯示相同的巖石性質(而且僅靠P波速度不能對巖石類型做出很好的區分),其他精細尺度的特征,如近垂直的斷層,就超出了廣角反射/折射方法的分辨率范圍。
(3)
(4)
本次掃描采用MS60儀器測角標稱精度≤±0.5″,測距精度為2 mm±2 ppm,常規模式下最大測量距離為60 m。根據經驗統計,該模式下全站儀實際測角精度一般為1.8″。現取S=60 m,mα=mαp=1.8,通過式(4)計算可得,u2=2.246 mm。
即點云平面坐標精度為
(5)
將u1、u2代入式(5),計算可得up=2.454 mm。
2.2 點云高程精度推算:
全站儀自由設站半測回觀測4對CPⅢ控制點后,自由設站點H方向不確定度uH=0.7 mm[15],引入的標準不確定度分量u1,有
u1=uH=0.7 mm
全站儀在A點完成自由設站后,采用免棱鏡模式測量構筑物點坐標,則任一點云高差為
hAP=SAPtanαA+iA-VP+fAP
(6)
式中,SAP為A、P兩點間的距離;αA為豎直角觀測值;iA為A點的儀器高;VP為P點的目標高;fAP為A、P兩點間兩差(地球彎曲差和大氣折射差)改正。引入的標準不確定度分量u2,有
(7)
由于在計算棱鏡中心的高程時,無需要量測儀器高和目標高,令儀器高miA、目標高mVP為0,有
(8)
點云高程綜合精度為
(9)
將u1、u2代入式(9),計算可得uh=1.062 mm。
根據以上推算,當掃描設站滿足X、Y、H三個方向小于0.7 mm的精度指標要求時,在30 kHz模式下點云坐標的平面及高程理論絕對精度分別為2.454 mm和1.062 mm。
3 工程案例
以青海省某高速運營鐵路精測網復測項目為例,該線路2014年底開通運營,設計速度250 km/h,線路橫穿祁連山山脈,實驗段平均海拔約3 200 m,2022年1月受地殼運動影響該線路兩處隧道變形嚴重,為了滿足隧道及線路設計專業對構筑物變形分析的需要,優先完成復測線路范圍內的精密工程控制網復測,在此基礎上采用Leica MS60掃描儀完成長約16.3 km隧道洞內掃描作業,靜態軌檢小車完成長約17 km軌道線形測量。掃描及小車作業均使用本次精測網復測CPⅢ測量成果,通過對點云數據去噪、軌道中線坐標提取以及斷面提取,并與靜態小車測量結果進行對比分析。
3.1 作業效率分析
將MS60掃描儀與靜態小車開展軌道線形測量在人員、設備以及單站用時等方面進行對比,結果見表2。
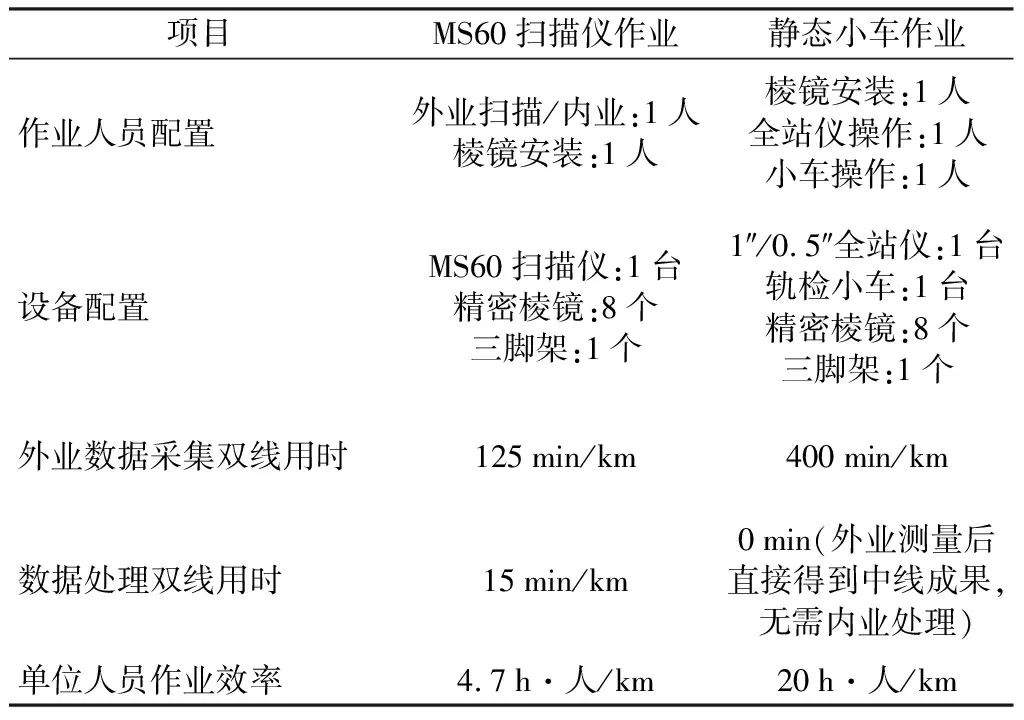
表2 三維掃描儀與靜態小車作業效率及成本對比
由表2可知,采用MS60進行軌道中線測量,人員較小車作業減少1人,雙線鐵路掃描作業每千米用時140 min,相較于小車減少260 min,定義兩種作業模式下每千米所用時間與人員數量為作業效率,三維激光掃描作業效率為4.7 h·人/km,相較于小車作業減少了25.3 h·人/km。三維激光掃描在人員、設備及效率方面遠優于靜態小車,在雙線雙軌線路作業時,MS60掃描儀優勢將更加明顯。
3.2 掃描儀設站精度分析
本次掃描共計完成414站外業掃描,其中大梁隧道掃描167站,祁連山隧道掃描247站,按照X、Y、H三個方向0.7 mm設站精度要求,對本次掃描外業設站精度進行統計,結果見圖2。
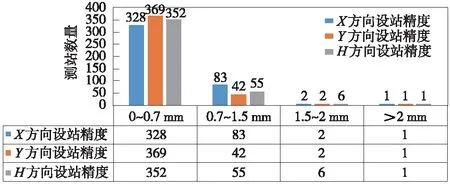
圖2 MS60掃描設站精度統計
由圖2可知,本次外業掃描共計414站,以0.7 mm設站精度指標為合格,則X方向設站精度滿足要求的為328站,合格率為79.23%;Y方向設站精度滿足要求的為369站,合格率為89.13%;H方向設站精度滿足要求的為352站,合格率為85.02%。結合現場實際分析,本次部分設站精度未達到0.7 mm的主要原因是在精測網復測和掃描作業期間,隧道未達到穩定,部分段落仍然存在輕微變形,導致掃描作業使用的CPⅢ成果與實際點位存在一定的偏移。
3.3 點云中線結果分析
對K1975+538~K1980+188里程范圍,采用自主研發的點云中線提取軟件按照20~50 m間隔進行中線提取,該軟件可通過導入設計中線或者手動編輯中線概略位置,實現鋼軌頂面點云自動搜索,從而計算得到線路左、右線的中線坐標。對點云提取到的中線坐標采用穩健平滑濾波方法處理[17],對異常值進行降權處理,當其大于6倍的平均絕對偏差時權重為0。
通過與靜態小車在相同位置測量結果進行對比分析,具體方法為:先計算同一里程處三維激光掃描儀中線提取結果與靜態小車測量中線坐標點間距,然后將點間距投影到線路橫向方向,結果見圖3。由圖3可知,點云中線水平位置和靜態小車測量中線基本吻合,橫向偏差統一為正值,中線橫向偏差平均值為2.7 mm,橫向偏差最大值為13.0 mm,橫向偏差最小值為0。

圖3 點云提取中線與小車測量中線坐標橫向偏差
假設靜態小車測量結果為真值,根據精度推算,掃面儀點云坐標平面理論精度約為σ=±2.5 mm,取2σ限差(±5 mm)為上限,對橫向偏差進行分布統計,結果見表3。由表3可知,橫向偏差0~2.5 mm范圍測點數為299個,占比為62%;橫向偏差2.5~5 mm范圍內測點數為112個,占比23%;0~5 mm范圍內測點累計為411個,占比為85%;橫向偏差大于10 mm的測點僅有11個,占比為2%。
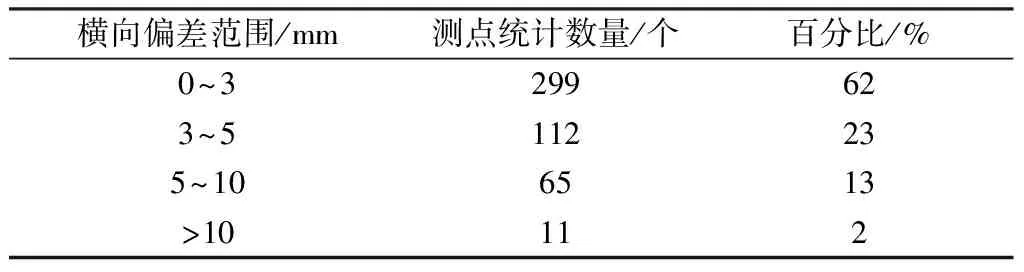
表3 點云提取中線與小車測量中線坐標橫向偏差結果分布統計
通過分析,造成橫向結果偏差較大的主要原因有以下幾點。
(1)軌道中線坐標是通過提取位于相同里程斷面處左右鋼軌頂面中間位置的點云坐標求平均值獲得,由圖4可知,由于鋼軌頂面在車輛長期打磨下形成了近似鏡面的反射面,導致鋼軌頂面中部返回的點云數據十分稀疏;相鄰測站中間位置處的點云見圖5,此時點云最稀疏;距離測站較遠處的點云見圖6,此時點云相對稀疏;圖7為圖4的點云展點,此時在中間光滑處幾乎沒有點云。以上情況下均難以實現對鋼軌中線的準確提取。
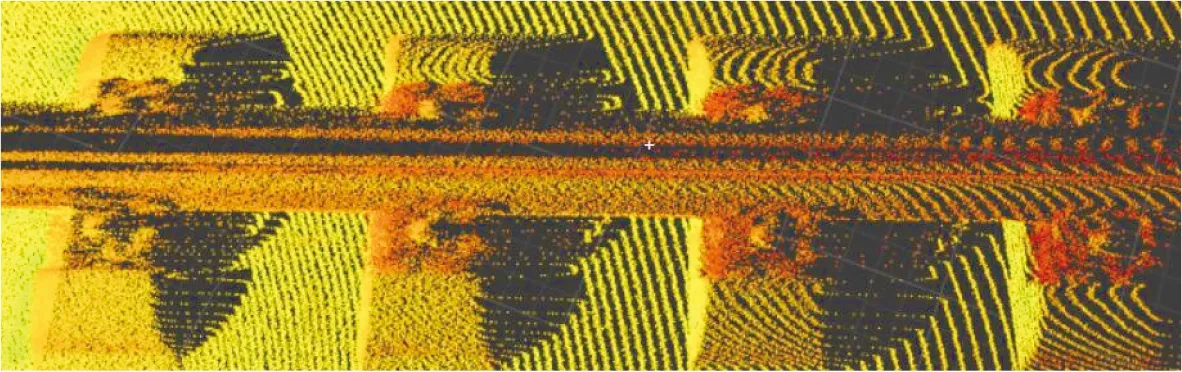
圖4 鋼軌頂面中間位置點云效果

圖5 測站中間處鋼軌頂面點云展點

圖6 測站附近處鋼軌頂面點云展點

圖7 光滑鋼軌頂面點云展點
(2)掃描儀部分設站精度無法滿足0.7 mm的精度要求,導致點云坐標精度無法達到理論值。
同一里程處點云高程與小車高程較差見圖8,點云間隔為0.5 m。高程較差在K1977+706處存在明顯臺階,K1975+538~K1977+706段點云高程小于小車測量高程,高程較差統一為負值,區段內高程較差平均值為7.2 mm;由于點云掃描作業與小車作業存在時間差,作業期間存在地殼運動,推測高程較差在K1977+706處存在明顯臺階是由地殼運動引起軌道變形造成。K1977+707~K1980+188范圍內點云高程與小車測量高程的高程較差主要為正值,區段內高程較差平均值為0.5 mm;測區范圍內高程較差絕對值平均值為3.9 mm,最大值為12.6 mm。
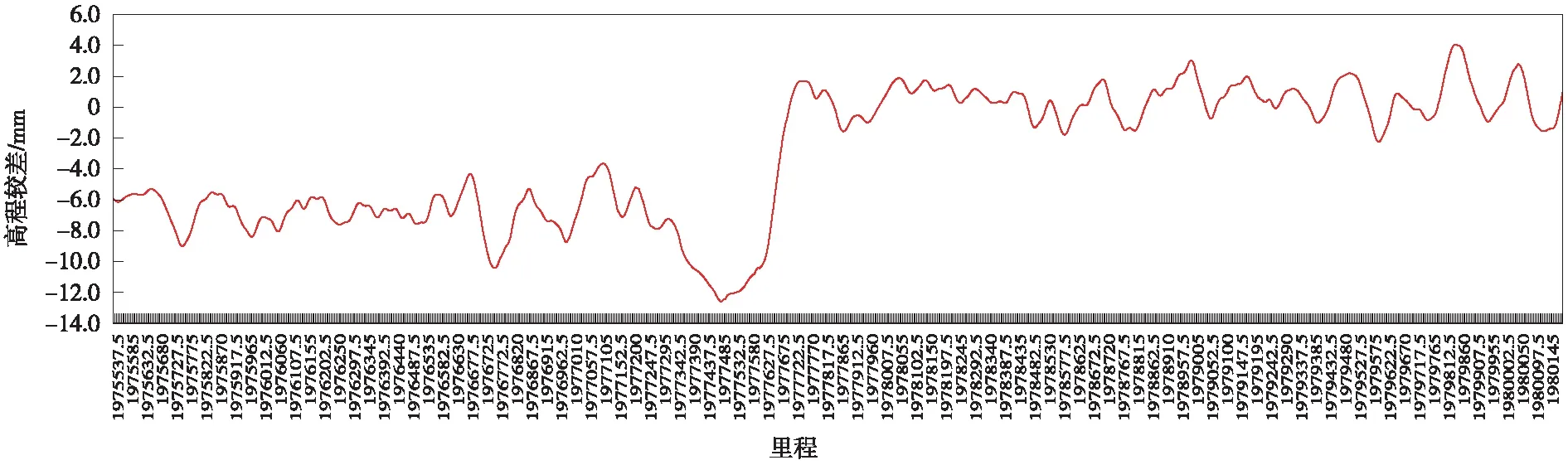
圖8 點云提取中線與小車測量中線坐標高程較差
根據精度推算,掃面儀點云坐標高程理論精度σ=±1 mm,取2σ限差(即±2 mm)為上限,對橫向偏差進行分布統計,結果見表4。
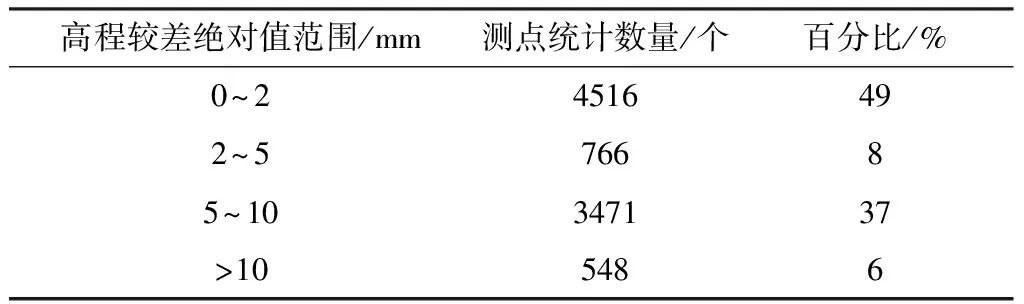
表4 點云提取中線與小車測量中線坐標高程較差結果分布統計
由表4可知,高程較差絕對值0~2 mm范圍測點數為4516個,占比為49%;高程較差絕對值2~5 mm范圍內測點數為766個,占比8%;高程較差絕對值5~10 mm范圍內測點數為3471個,占比37%;0~5 mm范圍內測點累計為5282個,占比為57%,高程較差大于10 mm的測點有548個,占比為6%。
通過分析造成高程結果偏差的主要原因有以下幾點。
(1)點云掃描作業與小車作業存在時間差,期間隧道受外力影響存在一定的變形,導致兩種方法測量結果存在一定差異。
(2)掃描儀作業時部分設站精度無法滿足0.7 mm的限差要求,導致點云坐標精度無法達到理論值。
4 結論
基于自由測站三維激光掃描儀進行軌道線形測量,通過提取位于左右鋼軌頂面的點云坐標計算得到軌道中線三維坐標。結合高速鐵路工程測量規范及工程實例分析,提出掃描儀設站精度應小于0.7 mm,并通過公式推導,得到此條件下點云坐標的平面及高程理論絕對精度分別為2.454 mm和1.062 mm。
工程實例驗證,通過點云中線坐標橫向偏差和高程較差對比,MS60掃描儀點云中線與小車測量結果橫向偏差平均值為2.7 mm,高程較差平均值為3.9 mm,其中K1977+707~K1980+188區段內平均值為0.5 mm。較差分布統計結果表明,MS60掃描儀點云結果穩定性較高,基于后方交會自由測站的三維激光掃描儀既可滿足隧道構筑物監測的要求,又可滿足軌道線形測量的要求。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(2013年3期)2013-06-24 05:40:30
