基于無線傳感器網絡的月球車定位導航分析
2023-02-18 09:54:44張政
科海故事博覽 2023年3期
關鍵詞:信息
張 政
(臨沂市第七中學,山東 臨沂 276000)
月球中存在大量礦產資源。如“嫦娥之父”歐陽自遠所言,如果能夠對月球資源進行有效開發并將其中的一部分運回地球,可供地球使用至少萬年時間。因此,探測月球、建立月球基地的最終目的是造福人類,也是當下航天活動的核心目標之一。我國早在2014 年便開展探月工程,時至今日,嫦娥五號返回艙已經帶回了部分月壤樣品。作為有志青年,應當積極參與青少年航天創新大賽活動。本文圍繞無人駕駛、有效探索兩個核心功能,設計了一款基于無線傳感器網絡技術,具有可自動避障尋跡、金屬探測功能的月球探測智能小車,現對相關思考及設計實現原理進行論述。
1 無線傳感器網絡技術內涵簡析
1.1 無線傳感器網絡結構及特點
無線傳感器網絡的結構是:在一定區域內設置網絡,其中的每一個節點都具有獨立性,可實現數據的收集及信息共享。一般情況下,無線傳感器網絡可以經由飛機拋灑或人工方式完成布置——大量節點可被部署在需要被感知對象的附近或內部[1]。由于所有節點具有相同的地位且無需進行任何事先安排,故各個感知節點可通過分布式算法,實現協調指揮。基于此,可以自動構建成一個面向對象的測量網絡。由于不存在中心節點,所以整個網絡的健壯程度極高,不會因為少數節點出現變動而造成網絡穩定性下降。
1.2 無線傳感器網絡關鍵技術及應用
無線傳感器網絡的關鍵技術及特點如下:其一,能量高效性。應用無線傳感器網絡技術時,需要確保能量得到高效利用,從而使網絡壽命最大化。相關原理是:傳感器節點的體積較小,攜帶的能量有限。與之相對的情況是,網絡內傳感器節點分布范圍廣、數量大、環境復雜程度較高。因此,很難采用人工方式完成電池的更換,補充能源也不現實。其二,拓撲控制性。在無線傳感器網絡下,原有的網絡拓撲結構極有可能在新節點加入、舊節點退出或是環境發生變化之后而隨之發生變化。基于此,需要設置拓撲控制結構,以提高網絡的整體穩定性。
2 月球車定位導航概述
2.1 月球車特點及功能簡析
月球探測車的本質是一種具有巡視功能,能夠執行探測任務、可靈活移動的無線探測機器人。這種設備在月球表面移動的過程中,需要對月面土壤進行采集并對潛在的礦藏資源進行尋找、發現。車輛在移動的過程中,內置的各項傳感器裝置還應對車輛本身、環境中的某些參數進行重點收集、比對。相關信息上傳至內置控制中心之后,對車輛的下一步行駛計劃做出調整,確保探測車能夠安全、穩定地運行。
2.2 月球車的定位導航方式
月球探測車的定位導航功能的主要作用是:使探測車具有準確定位能力——只有將月球車位置信息準確、完整地上傳,才能高效率、高質量地完成科學探測任務。現階段得到廣泛應用的月球車定位導航技術包括航位推算法、天文導航定位技術、視覺導航定位技術、激光雷達導航定位技術、無線電導航技術等。現階段,基于無線傳感器網絡節點的導航定位技術主要應用基于測距的節點定位算法以及非基于測距的節點定位算法,核心定位導航技術是“測距”[2]。
3 一種基于無線傳感器網絡技術的月球車定位導航功能實現分析
3.1 無人月球探測車設計思考
本文設計的基于無線傳感器網絡技術的月球探測車共由車輛載體、控制系統、外圍探測系統三個部分構成,具有自動躲避障礙、尋找前行路線、金屬探測等功能,具有較強的智能性,初步實現了月球探測車應該具有的多項功能[3]。設計過程中考慮的內容如下:
1.對成本和環境因素進行綜合考量之后,決定將月球車的能量來源確定為電能。在車輛啟動且開關處于“打開”狀態時,指示燈長期顯示為綠色(如圖1所示為月球車實物圖),車輛可正常行駛。
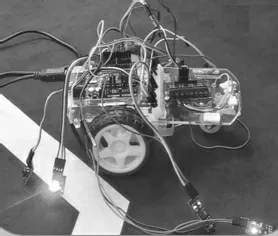
圖1 月球探測車實物圖
2.為確保車輛能夠自動搜索可供通行的線路并始終在制定線路內行駛,需要設置“尋跡傳感器”。該元器件的主要功能是:在探測車行駛過程中,以類似蝙蝠發射超聲探測波的方式,向車輛前往地帶發射探測波。一旦發現前方出現障礙物,尋跡傳感器便會感知并立刻向車輛控制中心發出預警信息,車輛內置燈會發出閃爍燈光。與此同時,車輛的行進方向也會發生變化,可避免車輛碰撞障礙物。
3.當車輛行駛至具有較大傾斜角度的地形時,內置的平衡感應開關會立刻啟動,相關信息(地形信息及車輛當前平衡信息)同樣會被立刻傳輸到控制中心并通知車輛發出預警燈光。車輛內置控制中心接收相關信息之后,會控制車輛后退,直到平衡感應開關關閉,意味著車輛此時已經抵達安全區域[4]。
4.月球探測車應該具備的一項核心功能是:對月球的礦產資源進行有效探測。考慮的要素是:月球探測車在逐漸接近金屬礦藏時,環境的磁場會在不同程度上發生改變。因此,探測車應該通過實時捕捉環境磁場變化信息的方式,判斷車輛本身是否逐漸接近金屬礦藏。設置的專用元器件是模擬霍爾傳感器。攜帶該元器件的探測車逐漸行駛到金屬礦藏附近時,霍爾傳感器會發出不同的信息,連帶著控制燈光變化并發出預警信息。此階段的另一項考量是,僅靠霍爾傳感器無法進一步判斷環境磁場的變化趨勢,且車輛沿著當前路線前行時是否會遭遇危險屬于未知事項。因此,車輛需要暫時停止行駛,在原地等待控制中心發布下一步行動指令。但“停車”并不意味著車輛內部的所有元器件全部暫停運轉,而是會對周圍環境溫度進行實時監控。如果溫度異常(多為過高)便會發布預警信息并立刻關閉系統,避免元器件受損。
3.2 無人月球探測車的構成及基本控制流程
3.2.1 無人月球探測車的基本構成
對上述四大類功能需求進行整體考量之后,決定在月球探測車內部設置Arduino 主板,以此作為月球車的控制中心(大腦)。將面包電源板以及電機驅動板作為月球車的動力供應來源。在此基礎上,還應設置具有不同功能的傳感器,進而對車輛本身狀態、環境信息進行監測及上傳,進而形成完整的功能體。月球探測車由以下元器件構成:車輪、電動機、模擬霍爾探測器、循跡傳感器、紅外避障傳感器、平衡傳感器、溫度傳感器、指示燈、主開關、Arduino 主板、電機控制板、面包板、電源、萬向輪。
3.2.2 基于無線傳感器網絡技術的月球車定位導航基礎程序邏輯控制
按照上文所述方式完成月球車的設計、組裝之后,需基于無線傳感器網絡技術,對月球車的行進過程進行控制。基礎邏輯程序控制流程如下:
1.啟動車輛之后,系統首先對開關狀態進行判定。如果開關處于開啟狀態,則如上文所述,指示燈顯示綠色,電機正常啟動并提供電動力,驅動車輛向前行駛。如果開關處于關閉狀態,則指示燈處于關閉狀態,車輛停止不前。
2.在車輛行駛的過程中,溫度傳感器會隨時收集車輛溫度信息并上傳至Arduino 主板構成的控制中心(大腦)端。控制中心存儲區域會預先設置正常溫度比對參數,實時反饋的溫度信息會與該正常比對參數(危險/正常臨界值)進行比對,判斷溫度處于正常狀態,車輛正常行駛并開展下一階段的判定作業。如果溫度比對結果提示車輛溫度處于異常狀態,則顯示燈會顯示紅色(意味著發出預警信息),電源會立刻關閉并使整個探測車處于待機狀態。
3.車輛行駛過程中,循跡傳感器會對車輛的行駛軌跡是否保持正常狀態進行檢測,如果發現車輛偏離制定路線,則指示燈會顯示藍色,控制中心會調整方向,控制車輛沿著制定路線行駛。
4.紅外線避障傳感器會對車輛行駛路線是否存在障礙物進行監測。如果前方存在障礙物,指示燈同樣會顯示藍色并發出報警信息,控制中心同樣會調整方向,避免車輛與障礙物碰撞。
5.在車輛行駛過程中,平衡傳感器會對車輛當前平衡狀態、傾斜角度等信息進行監測。如果發現平衡度已經超過危險臨界范圍,表明車輛當前所處區域的整體傾斜度(坡度)較大,意味著車輛如果繼續處于該環境,極有可能發生危險。此時指示燈會顯示藍色,控制中心會控制車輛沿著之前的行進線路后退或是調整前進方向,直到車輛平衡度恢復之后,指示燈顏色會從藍色轉變為綠色。
6.模擬霍爾探測器會在車輛行駛期間,對環境的磁場信息進行收集。如果發現環境磁場出現較大的變化,指示燈會不斷閃爍(以此作為預警信息)。控制中心收到這一信息之后,會暫停車輛運行,持續時間一般控制在5s 左右。在此期間,控制中心會對車輛當前所處位置進行標注,將該區域設定為“磁場異常區域”,之后會進一步向前搜索行駛并重復上述作業內容。
3.3 無人月球探測車行進過程的綜合控制
根據上述對無人月球探測車行進過程的基礎控制程序流程進行分析后,總結出的車輛行進綜合控制邏輯如下:其一,控制中心判斷開關是否處于打開狀態。其二,判斷車輛當前溫度是否處于正常狀態(是否能夠維持車輛處于正常行駛狀態)。其三,通過收集磁場信息,判斷車輛當前所處位置是否存在礦藏。其四,對車輛行駛過程中自身是否能夠維持平衡狀態、車輛行駛前方是否存在障礙物、車輛當前運行軌跡是否處于制定路線之中等情況進行監測。相關信息上傳至控制中心的同時,指示燈會根據具體情況,發出綠色(正常狀態)、藍色(控制中心需要調整車輛當前行進狀態)、紅色(存在異常情況,需要控制中心立刻處理)、閃爍(發現環境磁場出現明顯變化,疑似探測到礦藏)、指示燈熄滅(開關未開啟或因故需要暫時將車輛從運行狀態調整為停車狀態)。控制中心對探測車下一步運行方式進行的調整存在一定的限制性——只有前進、后退、轉向、停止四種選擇。綜合控制邏輯如下:
1.收集開關信息,如果開關未打開,小車處于停止運動狀態,指示燈處于關閉狀態。
2.開關處于打開狀態,則溫度傳感器對車輛溫度是否處于正常狀態進行監測。若溫度異常,車輛停止運動,指示燈從綠色變為紅色;若溫度正常,其他傳感器會同時啟動,對環境磁場、環境坡度(車輛平衡)、前方有無障礙物等信息進行收集。根據上文所述流程,指示燈會在特定的情況下完成顏色的定向變化。
4 結語
從本質角度來看,現代科學技術的核心發展方向是“控制與被控制”。“控制”功能實現的過程中,控制指令(信息信號)的傳輸效率、質量至關重要,如果能夠確保控制指令在極短時間內安全、完整地完成定向傳遞,便可使被控制設備做出特定的動作,以實現相關目標。本文提出的基于無線傳感器網絡技術的月球車由車輛載體、控制系統、外圍探測系統三部分功能,初步實現了探測車的各種功能,能夠確保控制指令穩定傳輸,可提供一定的借鑒。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
