基于北斗系統的船載USB軸系參數標校方法
2023-02-13 09:14:06田英國許國偉顧新鋒周海淵
測控技術 2023年1期
關鍵詞:方法
田英國,許國偉,顧新鋒,劉 洋,周海淵
(中國衛星海上測控部,江蘇 江陰 214431)
S頻段統一測控系統(簡稱USB)是航天測量船最為重要的測控設備。為確保在各類測量中的測量精度,必須適時對USB設備進行標校[1]。USB設備標校包括標定和校準2個過程,標定主要是指獲取USB設備跟蹤相位、定向靈敏度和軸系誤差參數的過程;校準主要是指調整設備跟蹤相位、定向靈敏度和軸系誤差參數等的過程,主要討論USB軸系誤差參數標定和校準問題。
目前,傳統USB軸系參數標校以光軸為中間量實現機械軸和電軸之間的轉換。光軸是機械軸的中介,而機械軸又是USB天線的幾何軸心,理論上該標校方法能夠滿足USB標校的需求[2-4]。但是在實際使用中,發現該方法操作難度大,容易受天氣等因素的影響,而且光學設備本身的精度及其安裝穩定度也會影響USB設備標校結果。近幾年,楊磊等[5]提出采用跟蹤精軌目標進行直接標校電軸參數的方法得到了成功應用,但是目前跟蹤精軌目標主要以跟蹤標校星為主,受限于標校星數量少、軌道回歸周期長和單次跟蹤角度覆蓋性較差,需多天跟蹤才能完成一次標校。同時獲取事后精軌周期長,導致標校時效性差,人力物力資源消耗多且引入環境變化誤差較多。目前,北斗衛星資源較多且分布均勻,包含有不同軌道周期的衛星,合理設計USB跟蹤北斗衛星方案,充分利用北斗衛星資源,進而提高USB軸系參數標校的效率,具有重要的研究價值[6-7]。
1 基于北斗系統的船載USB軸系參數標校方法
1.1 北斗衛星軌道計算方法
為避免小傾角帶來的軌道擬合奇異現象,北斗GEO衛星采用了中間軌道法擬合廣播星歷參數,即計算GEO衛星位置時需旋轉5°[8]。下面分別給出MEO/IGSO和GEO衛星位置計算方法。
計算歷元升交點的經度(地固系)為
(1)

計算MEO/IGSO衛星在CGS2000坐標系中的坐標為
(2)
式中:xk、yk為衛星在軌道平面內的坐標;ik為改正后的軌道傾角;Xk、Yk、Zk為衛星在CGS2000坐標系中的坐標。
計算歷元升交點的經度(慣性系)為
(3)
計算GEO衛星在自定義慣性系中的坐標為
(4)
式中:XK、YK、ZK為GEO衛星在自定義慣性系中的坐標。
計算GEO衛星在北斗坐標系中的坐標為
(5)
式中:XGK、YGK、ZGK為GEO衛星在北斗坐標系中的坐標;RX(φ)、RZ(φ)分別為
1.2 觀測方程
USB測角數據軸系誤差修正模型為
Ac=A+A0+βmsin(A-Am)tanE+
δmtanE+(Sb+Cs+ΔAZ)secE
Ec=E+E0+βmsin(A-Am)+
ΔEgcosE+(Ce+ΔEZ)
(6)
式中:A和E分別為實測方位角和俯仰角;A0為方位零位;E0為俯仰零位;βm為大盤不水平;Am為大盤最大傾斜方位;δm為俯仰、方位不正交;Sb為俯仰光軸不正交;Cs為方位光電偏差;Ce為俯仰光電偏差;ΔEg為重力下垂;ΔAZ、ΔEZ分別為方位、俯仰動態滯后;Ac、Ec分別為修正軸系誤差后的實測方位角、俯仰角。
由式(6)可知,俯仰上,零值、縱向光電偏差和動態滯后是相關的;方位上,光機偏差、橫向光電偏差和動態滯后是相關的,因此無法直接對所有參數進行估計。
1.3 誤差方程
已知動平臺的實時位置(即觀測站實時位置)和北斗衛星的實時位置,可得觀測站觀測北斗衛星的理論方位角和俯仰角。
在觀測站站心坐標系下,北斗衛星的坐標為
(7)
式中:Xstation、Ystation、Zstation為觀測站在大地坐標系下的坐標;Xp、Yp、Zp為北斗衛星在觀測站站心坐標系下的坐標;Xsat、Ysat、Zsat為北斗衛星在大地坐標系下的坐標;P為轉換矩陣,可表示為
(8)
式中:B為觀測站的大地緯度;L為觀測站的大地經度。
根據式(7)可得北斗衛星的站心坐標與站心極坐標的關系為
(9)
根據式(9)可得北斗衛星的理論方位角和俯仰角為
(10)
根據式(6)和式(10)可獲得動平臺雷達等效軸系參數標定的誤差方程如下:
Ac-Atheory=ΔA=A0+βmsin(A-Am)tanE+
δmtanE+(Sb+Cs+ΔUA/CA)secE
Ec-Etheory=ΔE=E0+βmsin(A-Am)+
ΔEgcosE+(Ce+ΔUE/CE)
(11)
記X=βmsin(Am),Y=βmcos(Am),則:
Ac-Atheory=ΔA=A0+XsinAtanE-YcosAtanE+δmtanE+
(Sb+Cs+ΔUA/CA)secE
Ec-Etheory=ΔE=E0+XsinA-YcosA+ΔEgcosE+
(Ce+ΔUE/CE)
(12)
記待估軸系參數為x,則有:
(13)
記A矩陣為
(14)
v=Ax-l
(15)
(16)
(17)
2 軸系參數標校流程
基于北斗系統的船載USB軸系參數標校流程如下:
① 根據標校計劃提前安排跟蹤時間段,并預估船舶大致的位置。
② 獲取北斗衛星導航接收機記錄的星歷數據。
③ 北斗衛星可見性預報,并判斷是否滿足USB軸系參數標校最優觀測條件。若滿足最優觀測條件,可在預定時間段和海域開展USB軸系參數標校;若不滿足最優觀測條件需重新選定跟蹤時間段。USB軸系參數標校最優觀測條件的判斷標準為:跟蹤時間段內北斗衛星高度角在10°~60°范圍內至少有3顆,且分布均勻。
④ 生成北斗衛星瞬時軌道根數。
⑤ 數字引導軟件裝訂北斗衛星瞬時軌道根數,生成數字引導數據。
⑥ USB設備根據數字引導數據跟蹤北斗衛星。跟蹤過程中,實時記錄USB跟蹤角度測量數據、捷聯慣導數據、衛導數據、變形數據、北斗衛星星歷和氣象數據等,并記錄各北斗衛星的跟蹤時間段。
⑦ 根據步驟⑥中的相關數據,使用基于北斗系統的船載USB軸系參數標校軟件開展USB軸系參數標校,獲得USB軸系參數標校結果。
⑧ 跟蹤其他北斗衛星(未參與標校的北斗衛星)或其他時間段的北斗衛星對新標校的軸系參數進行驗證。
基于北斗系統的船載USB軸系參數標校流程如圖1所示。
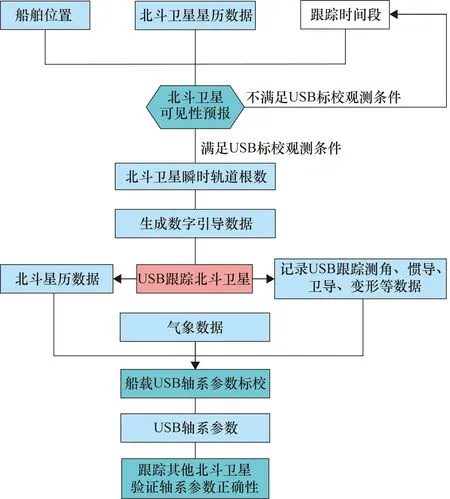
圖1 基于北斗系統的船載USB軸系參數標校流程
3 算例分析
為驗證基于北斗系統的船載USB軸系參數標校方法及數學模型的正確性,2021年4月開展了一次USB跟蹤北斗衛星試驗,USB跟蹤北斗衛星詳細情況如表1所示,跟蹤北斗衛星星空圖如圖2所示。
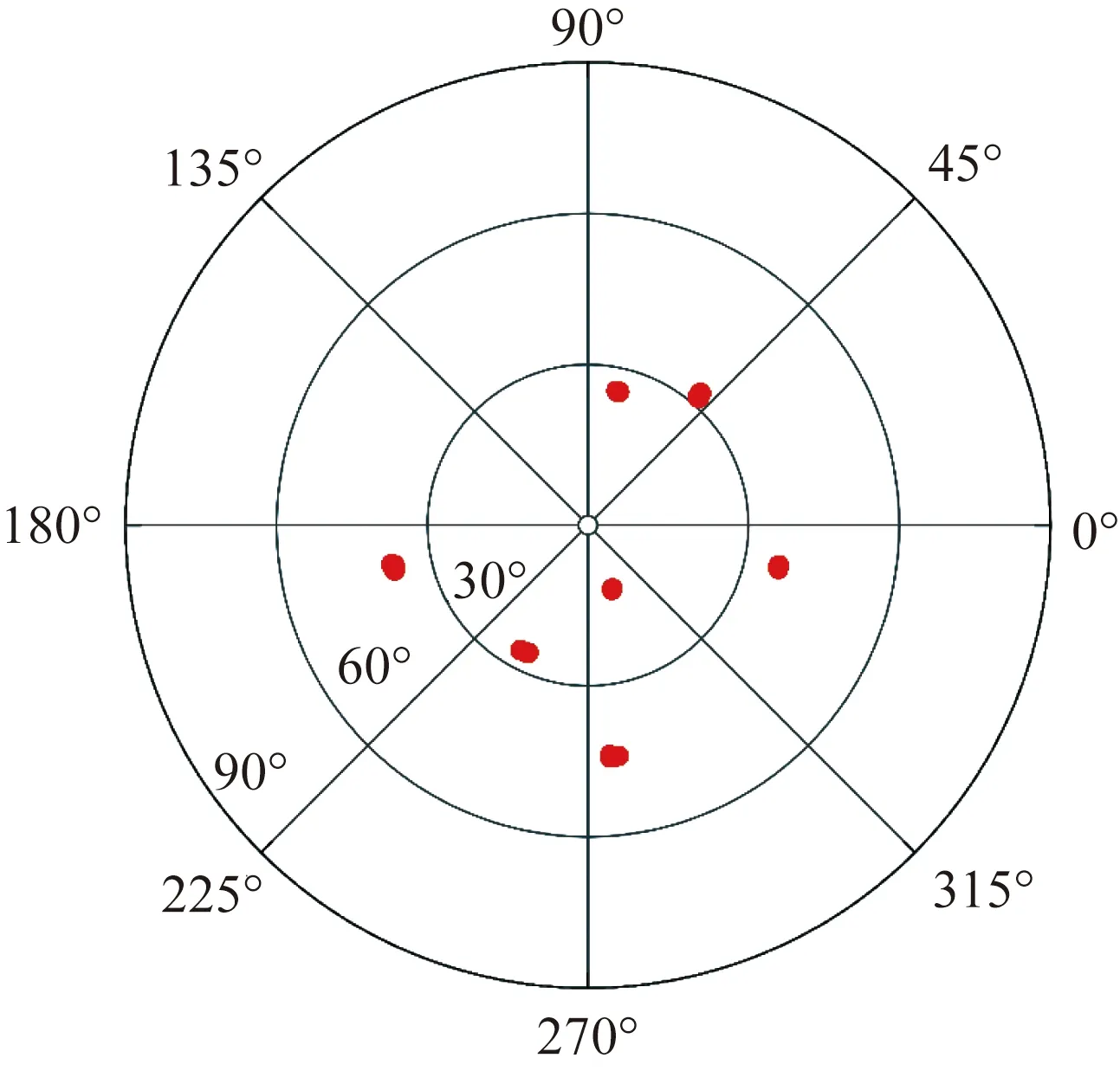
圖2 跟蹤北斗衛星星空圖
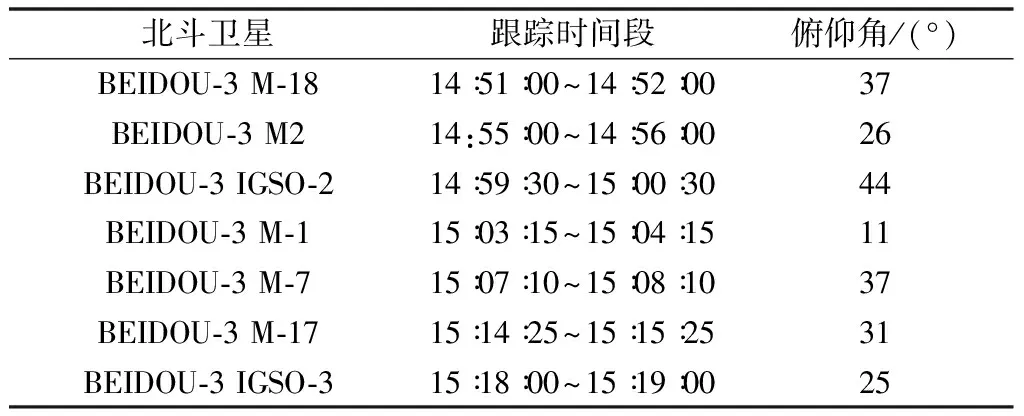
表1 USB跟蹤北斗衛星詳細情況
首先裝訂2021年3月跟蹤6 d標校星標定的軸系參數,如表2所示。分析2021年4月份USB跟蹤北斗衛星數據質量,并以分析結果作為基于北斗系統的船載USB軸系參數標校方法的比對參考。以北斗衛星廣播星歷為比對基準獲得比對結果,如表3所示。比對的方位俯仰殘差變化情況如圖3所示。

表2 跟蹤6 d標校星標定的軸系參數
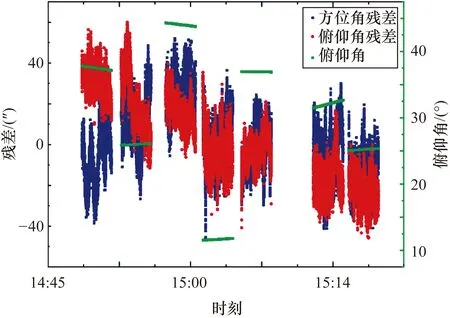
圖3 基于標校星標定的軸系參數的方位俯仰殘差圖

表3 基于標校星標定的軸系參數的殘差統計表
從圖3和表3的殘差分析結果可知,2021年4月份USB跟蹤北斗衛星數據質量較好,北斗軌道等數據處理模型是正確的。
使用基于北斗系統的船載USB軸系參數標校方法處理2021年4月USB跟蹤北斗衛星數據,以北斗衛星廣播星歷為參考基準,標定USB軸系參數。基于USB跟蹤北斗數據標校獲得的軸系參數如表4所示。基于跟蹤北斗衛星數據估計軸系參數的方位俯仰殘差如圖4所示,殘差統計情況如表5所示。
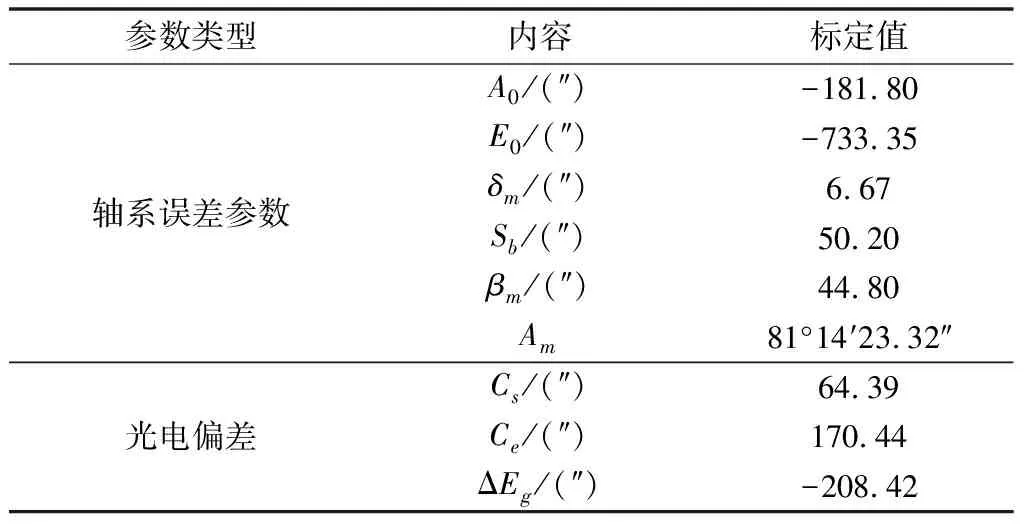
表4 基于USB跟蹤北斗數據標校獲得的軸系參數
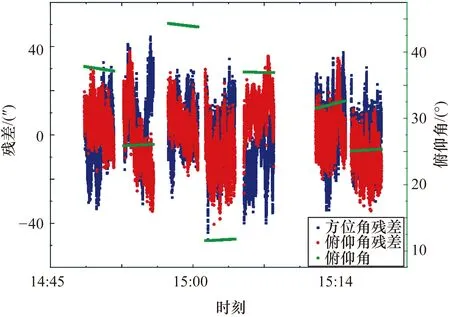
圖4 基于跟蹤北斗衛星數據估計軸系參數的方位俯仰殘差圖

表5 基于跟蹤北斗衛星數據估計軸系參數的殘差統計表
比較表2和表4兩組軸系參數發現,俯仰零位差異很小,且各項誤差總和差異也很小,但是和方位相關的誤差項不盡相同。主要原因是此次試驗僅使用了7顆北斗衛星的有效數據,北斗衛星運動相對較慢,實際上每顆衛星相當于只有1個有效的方位俯仰觀測量,且7顆衛星俯仰方向的分布相對均勻。初步分析認為在方位上的數據量較少,進而導致與方位角相關的軸系參數標定結果不穩定。
為進一步分析使用標校星標定方法和使用北斗系統標校方法的效率,對某標校星方位俯仰覆蓋范圍進行仿真分析,如圖5所示。考慮到軸系參數估計方位俯仰角度覆蓋范圍要求、標校星軌道回歸周期、軸系參數標校結果驗證和避開深夜作業等因素,使用標校星標定方法至少需要3 d才能完成一次標校。
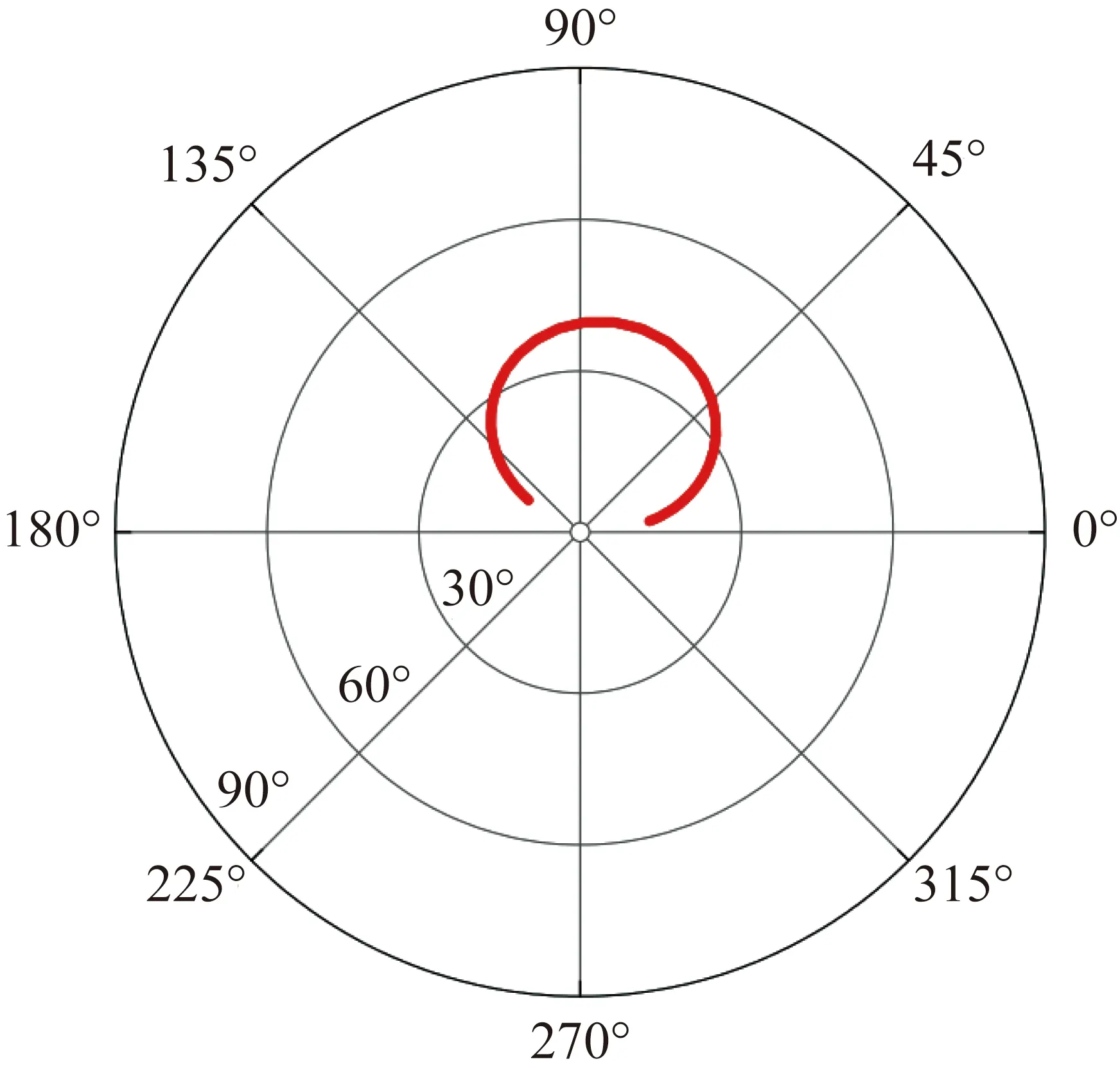
圖5 某標校星方位俯仰覆蓋范圍仿真圖
比較使用標校星標定方法和基于北斗系統的船載USB軸系參數標校方法發現:2種方法獲取的軸系參數精度基本相當,但使用基于北斗系統標校方法僅需1 h即可完成標校,使用標校星標定方法至少需3 d才能完成一次標校,且基于北斗系統的標校方法可隨時組織實施。因此,基于北斗系統的標校方法在標校效率方面有明顯的優勢。
針對與方位角相關的軸系參數標定結果不穩定的情況,可通過以下2種方法進行解決:① 增加跟蹤北斗衛星的數目;② 在船舶轉向過程中USB跟蹤北斗衛星,通過轉向獲得更多方位方向上的觀測數據。
4 結束語
針對目前直接標校USB電軸參數受限于標校星數量少、軌道回歸周期長、單次跟蹤角度覆蓋性較差且需多天跟蹤才能完成一次標校,同時獲取事后精軌周期長,導致標校時效性差等問題,在目前直接標校電軸參數的方法基礎上,充分利用北斗衛星資源較多和分布均勻,包含有不同軌道周期的衛星的特點,通過合理設計USB跟蹤北斗衛星方案提高了USB軸系參數標校的效率。根據試驗驗證,基于北斗系統的船載USB軸系參數標校方法可行,標校結果滿足USB測角精度指標要求。本方法實施方便,可推廣至各類動態平臺雷達的參數標定。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
