純電動四驅(qū)汽車分軸過零控制策略研究
2023-02-10 12:13:20陽鵬裴赫
汽車文摘 2023年2期
關(guān)鍵詞:駕駛員
陽鵬 裴赫
(威馬汽車科技集團(tuán)有限公司成都研究院,成都 610110)
主題詞:四驅(qū)控制 分軸過零 電機(jī)轉(zhuǎn)矩?fù)Q向 轉(zhuǎn)矩濾波 整車控制器
1 引言
對于新能源車尤其是純電動車,如果電機(jī)轉(zhuǎn)矩過零控制不好或頻繁轉(zhuǎn)矩過零,在減速與加速切換時,容易發(fā)生車輛抖動,并伴隨敲擊齒的噪聲。主要原因?yàn)閭鲃渔滮X輪間存在間隙、電機(jī)轉(zhuǎn)矩?fù)Q向控制過快導(dǎo)致產(chǎn)生噪聲。齒輪在設(shè)計、制造、裝配過程中存在不可避免的誤差,導(dǎo)致齒輪傳動系統(tǒng)中存在間隙非線性因素,從而產(chǎn)生嚙合振動[1],齒輪間隙是輪系正常工作必須有的結(jié)構(gòu)參數(shù)。車輛行駛中電機(jī)從驅(qū)動變?yōu)槟芰炕厥眨驈哪芰炕厥兆優(yōu)轵?qū)動時,主動齒輪和被動輪會產(chǎn)生一個短暫的相對加速度,齒輪傳動嚙合面從一側(cè)轉(zhuǎn)移到另外一側(cè),撞擊到嚙合面,從而產(chǎn)生沖擊。電機(jī)轉(zhuǎn)矩發(fā)生正負(fù)變化時,轉(zhuǎn)矩過零,電機(jī)輸出到減速器的驅(qū)動齒輪貼靠面由一面靠齒變?yōu)榱硪幻婵魁X,即存在傳動間隙,此時若電機(jī)轉(zhuǎn)矩仍按原有的斜率變化,轉(zhuǎn)矩方向瞬間改變,驅(qū)動齒輪前后貼靠面瞬間變化,將會導(dǎo)致較大的轉(zhuǎn)速波動,嚴(yán)重影響整車的平順性和駕駛的舒適性[2]。
行業(yè)內(nèi)硬件層面研究齒輪加工和制造工藝,軟件層面較多研究變速箱換擋時扭矩過零。本文研究電動四驅(qū)利用電控控制技術(shù),利用前后兩個電機(jī)轉(zhuǎn)矩相互補(bǔ)充控制過零,減小轉(zhuǎn)矩過零換向沖擊。
2 電動四驅(qū)轉(zhuǎn)矩過零研究
2.1 電動四驅(qū)結(jié)構(gòu)
對于一種純電動雙電機(jī)四驅(qū)系統(tǒng)(圖1),在行駛過程中前后電機(jī)都會連接在動力系統(tǒng)上[3]。電動四驅(qū)有前軸和后軸2個電機(jī),由于電動車有能量回收,轉(zhuǎn)矩?fù)Q向若控制不好,則對駕駛性和整車性能造成影響。
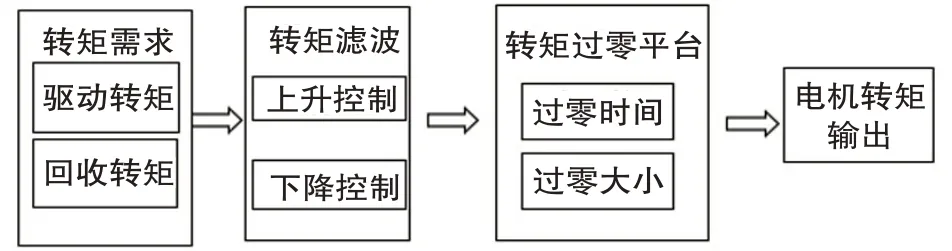
圖1 某純電動四驅(qū)結(jié)構(gòu)
2.2 電動四驅(qū)過零控制分析
為了優(yōu)化電動四驅(qū)系統(tǒng)的過零問題,設(shè)計了控制策略優(yōu)化方案:
(1)從設(shè)計過零平臺著手,控制轉(zhuǎn)矩?fù)Q向過程,達(dá)到平穩(wěn)過渡;
(2)四驅(qū)雙電機(jī)分軸互補(bǔ)過零,減少過零次數(shù)。本文從過零平臺建設(shè)和互補(bǔ)過零這2個角度優(yōu)化控制電動四驅(qū)過零控制。
2.2.1 設(shè)計過零平臺,控制換向過程
為了避免電機(jī)換向過快的轉(zhuǎn)矩沖擊,在整車控制器(Vehicle Control Unit,VCU)收到駕駛員的加速踏板對應(yīng)的原始轉(zhuǎn)矩需求時,VCU將轉(zhuǎn)矩需求進(jìn)行濾波,并在零轉(zhuǎn)矩附近設(shè)計過零平臺(圖2)。在電機(jī)實(shí)際轉(zhuǎn)矩到達(dá)過零平臺時,轉(zhuǎn)矩指令短暫停頓50~150 ms,以避免電機(jī)較大的轉(zhuǎn)矩沖擊,減小轉(zhuǎn)矩變化率,讓電機(jī)主動齒輪和被動齒輪以較小的相對速度和較小的相對加速度貼合,從而減小沖擊。在不同的車速和加速踏板開度下,可對實(shí)車轉(zhuǎn)矩平臺停頓時間進(jìn)行標(biāo)定。在駕駛員需求轉(zhuǎn)矩較小時,過零時間標(biāo)定的較長,因?yàn)榇藭r駕駛員需求變化較慢,較長的過零時間有利于齒輪嚙合面緩慢貼合。若加速踏板深度較大,則過零時間標(biāo)定需較短,因?yàn)榇藭r駕駛員有較迫切的加速需求,為了兼顧加速性能和駕駛性能,標(biāo)定的結(jié)果需要工程師進(jìn)行主觀評價。
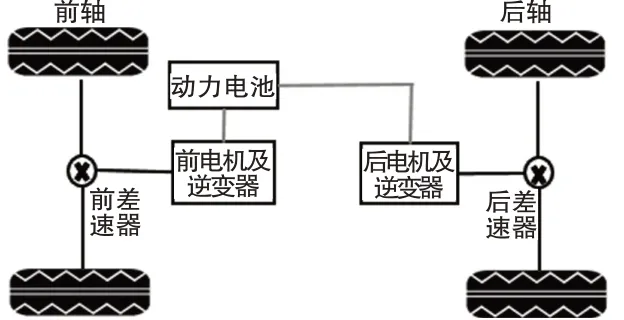
圖2 VCU轉(zhuǎn)矩過零平臺設(shè)計
駕駛員的原始需求轉(zhuǎn)矩經(jīng)過VCU的轉(zhuǎn)矩濾波模塊和轉(zhuǎn)矩過零平臺模塊,轉(zhuǎn)化為濾波后的需求轉(zhuǎn)矩,發(fā)送給電機(jī)控制器執(zhí)行,從而可以減緩轉(zhuǎn)矩過零的沖擊(圖3)。
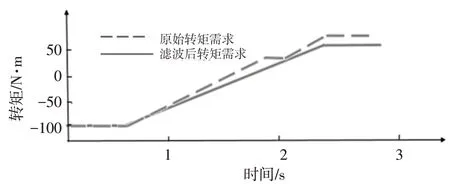
圖3 轉(zhuǎn)矩濾波前后轉(zhuǎn)矩需求對比
2.2.2 四驅(qū)分軸互補(bǔ)過零,減少過零次數(shù)
為了減少電機(jī)過零換向次數(shù),本文提出一種基于電動四驅(qū)分軸過零控制策略,提高四驅(qū)的駕駛性能。在低車速時,駕駛員對聲音較敏感,噪音及抖動容易被駕駛員感知。在高車速時,考慮整車振動易被路面激勵反饋掩蓋,駕駛員對輕微抖動容忍度更高。
本文涉及的永磁同步電機(jī)空載損失與轉(zhuǎn)速成正比。如圖4所示,電機(jī)轉(zhuǎn)速小于1 500 r/min時,空載損失小于0.2 kW。綜合考慮空載損失和低速抖動優(yōu)先級,基于駕駛員對低車速駕駛性較敏感,以及低車速的空載損失較小的原因,本系統(tǒng)在車速為20 km/h以下實(shí)施該轉(zhuǎn)矩分配策略。轉(zhuǎn)速增加至大于和等于1 500 r/min時,空載損失會較大,同時評估駕駛員對工況駕駛性的感知性,不實(shí)施分軸過零策略。

圖4 某款電機(jī)空載損耗
3 電動四驅(qū)分軸過零策略方案實(shí)施
3.1 分軸過零控制策略方案分析
針對以上情況,設(shè)計一種基于純電動四驅(qū)分軸過零轉(zhuǎn)矩控制構(gòu)架(圖5)。該轉(zhuǎn)矩控制架構(gòu)包括轉(zhuǎn)矩需求、轉(zhuǎn)矩濾波、四驅(qū)分配和四驅(qū)分軸過零模塊。該構(gòu)架滿足四驅(qū)控制系統(tǒng)前提下,可以優(yōu)化四驅(qū)過零的駕駛性能。
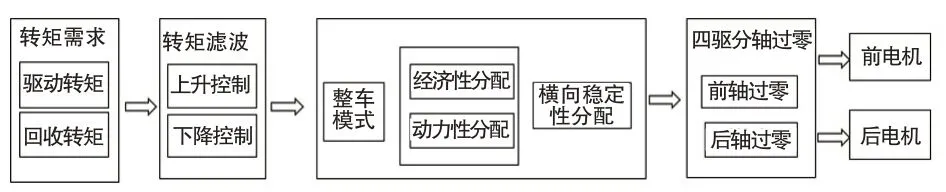
圖5 四驅(qū)分軸過零轉(zhuǎn)矩架構(gòu)
3.2 工況法研究分軸過零
能量回收工況時,VCU指定常用前電機(jī)進(jìn)行能量回收。在四驅(qū)模式開啟,駕駛員有轉(zhuǎn)向行為時,會啟動整車控制器的橫向穩(wěn)定性分配模塊,在前輪附著力不夠時,將回收轉(zhuǎn)矩從前電機(jī)轉(zhuǎn)移至后電機(jī),使整車保持橫向穩(wěn)定性,從而前后電機(jī)都可參與能量回收[4]。
驅(qū)動工況時,VCU在駕駛員需求轉(zhuǎn)矩不大時,指定前軸參與驅(qū)動。當(dāng)加速踏板開度大時,當(dāng)前軸電機(jī)不足以滿足駕駛員需求時,后電機(jī)會接入?yún)⑴c驅(qū)動,以及VCU在結(jié)合前后軸時計算電機(jī)效率,若同時驅(qū)動前后電機(jī)有利于整體效率提高,也會驅(qū)動前后電機(jī)協(xié)同參與驅(qū)動。以下基于工況法,舉例5種四驅(qū)分軸互補(bǔ)過零策略應(yīng)用。
3.2.1 雙電機(jī)驅(qū)動過渡至單電機(jī)能量回收
若前序工況需求轉(zhuǎn)矩較大,在四驅(qū)控制模式下,2個電機(jī)都在驅(qū)動時,駕駛員松開加速踏板、意圖減速,此時VCU控制前電機(jī)從驅(qū)動狀態(tài)經(jīng)過過零平臺進(jìn)行能量回收。后電機(jī)從正轉(zhuǎn)矩下降至2 N·m,保持在過零轉(zhuǎn)矩以上2 N·m,即實(shí)現(xiàn)了只有單電機(jī)一次過零(圖6)。
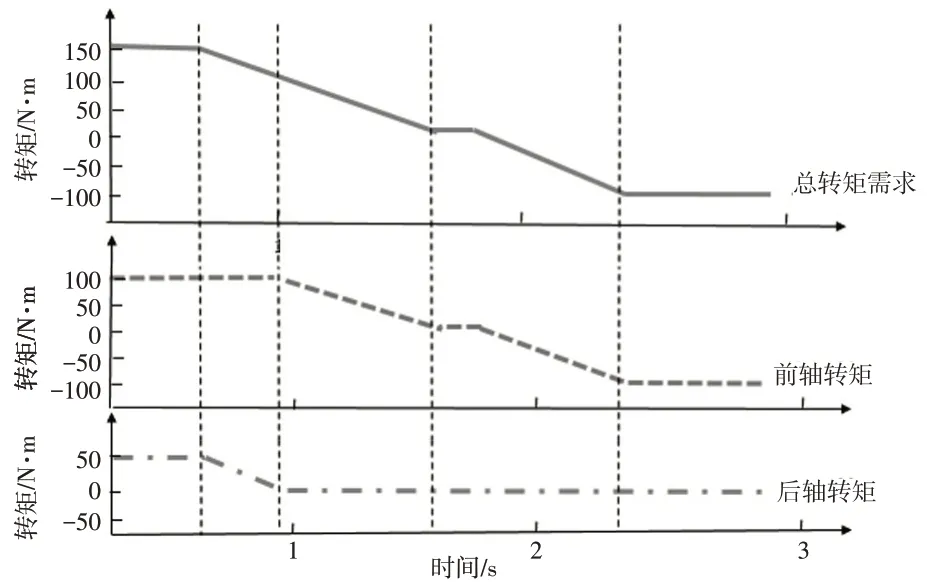
圖6 雙電機(jī)驅(qū)動至單電機(jī)回收
3.2.2 單電機(jī)驅(qū)動過渡至單電機(jī)能量回收
若前序駕駛工況需求轉(zhuǎn)矩不大,單電機(jī)能滿足駕駛需求,則在單電機(jī)驅(qū)動模式,另一個電機(jī)在過零轉(zhuǎn)矩以下的-2 N·m待命(圖7)。駕駛員松開加速踏板時,意圖減速,此時VCU控制后電機(jī)的正轉(zhuǎn)矩先下降,至2 N·m時,控制前電機(jī)從-2 N·m繼續(xù)下降,使前后電機(jī)穩(wěn)步交替下降,實(shí)現(xiàn)駕駛員的原始轉(zhuǎn)矩需求,本工況無需穿越過零轉(zhuǎn)矩。
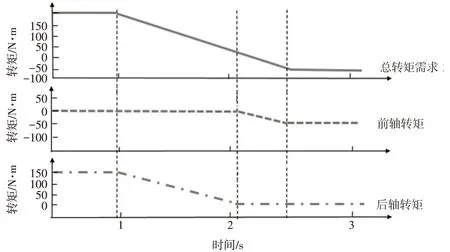
圖7 單電機(jī)驅(qū)動過渡至單電機(jī)回收
3.2.3 雙電機(jī)能量回收過渡至單電機(jī)驅(qū)動
若前序工況包括帶轉(zhuǎn)向時,四驅(qū)系統(tǒng)會根據(jù)轉(zhuǎn)向側(cè)傾趨勢,動態(tài)地在2軸間轉(zhuǎn)移能量回收過程,因前序工況為雙電機(jī)能量回收工況,此時駕駛員踩加速踏板,前電機(jī)轉(zhuǎn)矩上升至-2 N·m時就不再上升,在前電機(jī)到達(dá)-2 N·m后,再由后電機(jī)從負(fù)轉(zhuǎn)矩繼續(xù)上升,并穿越0轉(zhuǎn)矩到正轉(zhuǎn)矩,由后電機(jī)實(shí)現(xiàn)驅(qū)動功能,滿足駕駛員的加速預(yù)期,從而使單一電機(jī)完成過零過渡(圖8)。
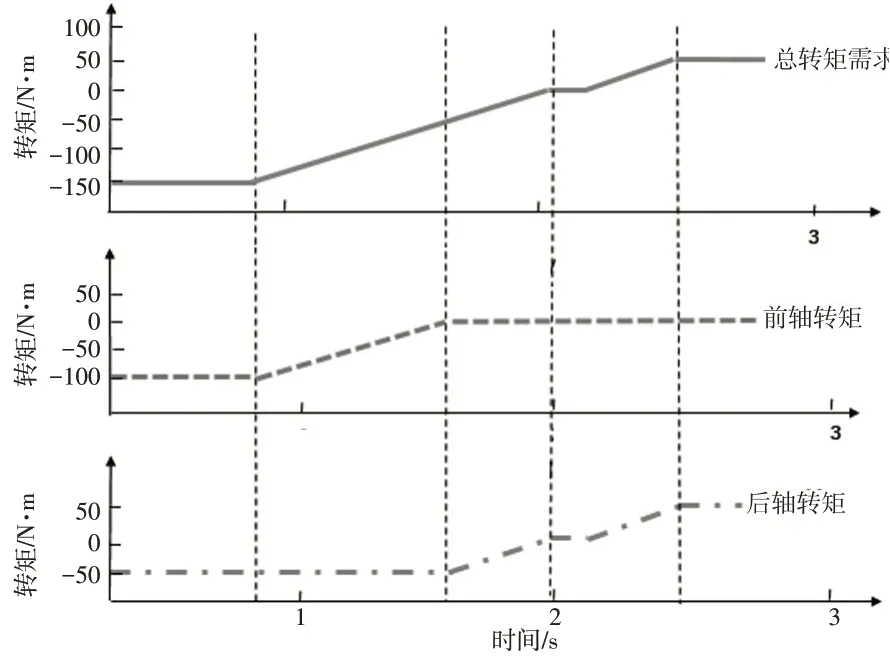
圖8 雙電機(jī)能量回收過渡至單電機(jī)驅(qū)動
3.2.4 雙電機(jī)能量回收過渡至雙電機(jī)驅(qū)動
若前序工況為帶轉(zhuǎn)向的四驅(qū)松油門狀態(tài)下的能量回收工況,此時駕駛員大幅度踩加速踏板,一個電機(jī)已不能滿足駕駛員的駕駛需求,應(yīng)以驅(qū)動優(yōu)先,雙電機(jī)都需要輸出正轉(zhuǎn)矩以驅(qū)動車輛。為了滿足駕駛員的加速需求,前、后電機(jī)交替穿越0轉(zhuǎn)矩并到正轉(zhuǎn)矩[5],在一個電機(jī)過零時,另一個電機(jī)補(bǔ)充轉(zhuǎn)矩需求,實(shí)現(xiàn)2個電機(jī)實(shí)際總轉(zhuǎn)矩上升斜率和總轉(zhuǎn)矩需求斜率和大小一致,實(shí)現(xiàn)駕駛員的加速需求(圖9)。

圖9 雙電機(jī)能量回收過渡至雙電機(jī)驅(qū)動
3.2.5 單電機(jī)回收過渡至單電機(jī)驅(qū)動
若前序工況正常但進(jìn)入電機(jī)的能量回收工況,此時駕駛員輕踩油門踏板,VCU控制在能量回收的電機(jī)跟隨原始需求轉(zhuǎn)矩,達(dá)到過零平臺轉(zhuǎn)矩以下的-2 N·m,無需穿過過零平臺,此時在過零轉(zhuǎn)矩平臺以上的電機(jī)接力跟隨原始需求轉(zhuǎn)矩繼續(xù)上升(圖10),實(shí)現(xiàn)轉(zhuǎn)矩沒有過零的目標(biāo)。

圖10 單電機(jī)能量回收過渡至單電機(jī)驅(qū)動
3.3 實(shí)施與驗(yàn)證
基于以上的分析,利用Simulink完成建模后生成代碼,編譯集成后,生成文件導(dǎo)入到控制器中,開展實(shí)車驗(yàn)證。
本次驗(yàn)證采用主、客觀聯(lián)合驗(yàn)證方法。
主觀評價上,制定相對合理評分體系來盡量減少各個評價者之間的主觀評價標(biāo)準(zhǔn)不一致的情況[6],以5位以上不同年齡段工程師,在不知道軟件變更情況下,按照以上工況法提及的5種駕駛工況測試后,并進(jìn)行實(shí)施前后的結(jié)果對比,實(shí)施結(jié)果如表1所示。

表1 主觀評價 分
客觀上,通過CAN信號采集設(shè)備進(jìn)行數(shù)據(jù)采集,以過零時刻電機(jī)轉(zhuǎn)速波動幅度作為評價電機(jī)過零沖擊標(biāo)準(zhǔn),該評價方法在工程上便于測量實(shí)施,且能有效表征電機(jī)過零時的抖動和沖擊,并統(tǒng)計多次試驗(yàn)平均值。對比軟件實(shí)施前后,按照以上工況法提及的5種駕駛工況測試后,分析對比前后電機(jī)在過零時電機(jī)轉(zhuǎn)速波動的幅度作為參考標(biāo)準(zhǔn),并對實(shí)施前后的結(jié)果進(jìn)行對比,實(shí)施結(jié)果如表2所示。

表2 客觀評價-過零電機(jī)轉(zhuǎn)速波動幅度 r/min
4 結(jié)束語
在純電動四驅(qū)中,由于前后雙電機(jī)都可以參與能量回收和驅(qū)動,電機(jī)換向過零次數(shù)也會增加,給整車駕駛性帶來挑戰(zhàn)。
本文提出了純電動四驅(qū)分軸互補(bǔ)過零策略,經(jīng)過問題分析、策略優(yōu)化和測試驗(yàn)證,建立了過零平臺,實(shí)現(xiàn)過零過程控制,達(dá)到了前后電機(jī)分軸過零,減少總轉(zhuǎn)矩過零次數(shù)的目標(biāo),有效地優(yōu)化了電機(jī)過零帶來的車輛抖動。經(jīng)過主、客觀評價,本文提出的分軸互補(bǔ)過零策略滿足了電動四驅(qū)車的駕駛性要求。
未來研究中,為了兼顧急加速的需求,結(jié)合本文過零平臺在急加速時產(chǎn)生的動力遲滯感問題,將研究自適應(yīng)過零平臺時間問題。
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50