基于聯(lián)合仿真的純電動(dòng)客車制動(dòng)控制策略對(duì)比分析與優(yōu)化
2023-02-08 08:43:06張景玲周夢(mèng)來胡榮俊周廣波
汽車電器 2023年1期
張景玲,周夢(mèng)來,胡榮俊,周廣波
(揚(yáng)州亞星客車股份有限公司 汽車研究院,江蘇 揚(yáng)州 225000)
隨著中國(guó)能源安全和環(huán)境污染問題日益突出,純電動(dòng)客車已成為客車發(fā)展的重點(diǎn)方向[1]。但與傳統(tǒng)燃油車相比,純電動(dòng)客車的研發(fā)一直面臨著續(xù)航里程短的技術(shù)瓶頸。制動(dòng)能量回收是提升純電動(dòng)客車?yán)m(xù)航里程的重要手段,研究分析及優(yōu)化不同制動(dòng)控制策略對(duì)純電動(dòng)汽車的影響,對(duì)提升其續(xù)航里程有著重要的意義。目前,部分學(xué)者已對(duì)制動(dòng)能量管理進(jìn)行了大量研究[2]。張衛(wèi)等通過對(duì)制動(dòng)力學(xué)和制動(dòng)法規(guī)研究分析,獲得了前、后輪制動(dòng)力分配控制可行域,建立了再生制動(dòng)優(yōu)先控制模型[3];周海林等結(jié)合電機(jī)驅(qū)動(dòng)與制動(dòng)原理,提出了合理的再生制動(dòng)方法,建立了最大化制動(dòng)力分配策略[4]。楊坤等提出了分段式ABS電磁閥調(diào)壓模型,并基于Matlab/Simulink/Stateflow和AVL Cruise搭建了聯(lián)合仿真平臺(tái)[5]。現(xiàn)有的研究大部分基于模型的搭建、策略的優(yōu)化升級(jí)及仿真分析,而針對(duì)實(shí)際使用情況時(shí)的驗(yàn)證分析還較少涉及。本文首先針對(duì)純電動(dòng)客車串聯(lián)式和并聯(lián)式制動(dòng)兩種不同的控制策略,使用Matlab/Simulink與AVL Cruise進(jìn)行聯(lián)合仿真,并對(duì)比分析相同工況下的仿真結(jié)果。接著根據(jù)實(shí)際使用情況,采用實(shí)際公交車路譜,并在控制策略中引入電機(jī)扭矩map的計(jì)算方法,最后與監(jiān)控平臺(tái)的數(shù)據(jù)對(duì)比,驗(yàn)證模型的準(zhǔn)確性。
1 串并聯(lián)制動(dòng)控制策略及仿真對(duì)比
1.1 串并聯(lián)制動(dòng)控制策略
純電動(dòng)客車制動(dòng)能量回收功能是指通過設(shè)定的控制策略,采用電制動(dòng)的方法將部分動(dòng)能轉(zhuǎn)化為電能,并反向存儲(chǔ)至電池包中,如果后續(xù)整車有能量需求,則將儲(chǔ)存的能量釋放出來,通過此過程能實(shí)現(xiàn)能量的再次利用[6]。
制動(dòng)能量回收系統(tǒng)可分為兩種類型,即并聯(lián)型和串聯(lián)型[7]。在并聯(lián)式制動(dòng)系統(tǒng)中,機(jī)械制動(dòng)力一直存在,而系統(tǒng)根據(jù)制動(dòng)需求在機(jī)械制動(dòng)力的基礎(chǔ)上疊加電制動(dòng)力。因此并聯(lián)式制動(dòng)系統(tǒng)簡(jiǎn)單高效,直接把電制動(dòng)力疊加到傳統(tǒng)機(jī)械制動(dòng)上,不需要對(duì)機(jī)械制動(dòng)進(jìn)行改進(jìn),同時(shí)也能保證制動(dòng)性能[8]。但是該制動(dòng)系統(tǒng)效率偏低,制動(dòng)過程中還會(huì)引起駕駛員的不適感[9]。在本文中,串并聯(lián)式制動(dòng)控制模型采用Matlab/Simulink搭建。在并聯(lián)式制動(dòng)模型中,考慮到實(shí)際使用情況設(shè)置了機(jī)械制動(dòng)空行程,即在計(jì)算整車機(jī)械制動(dòng)扭矩時(shí)設(shè)置踏板開度的前30%不制動(dòng),具體如圖1所示。電制動(dòng)與機(jī)械制動(dòng)相互獨(dú)立,電制動(dòng)的計(jì)算如式(1)所示。
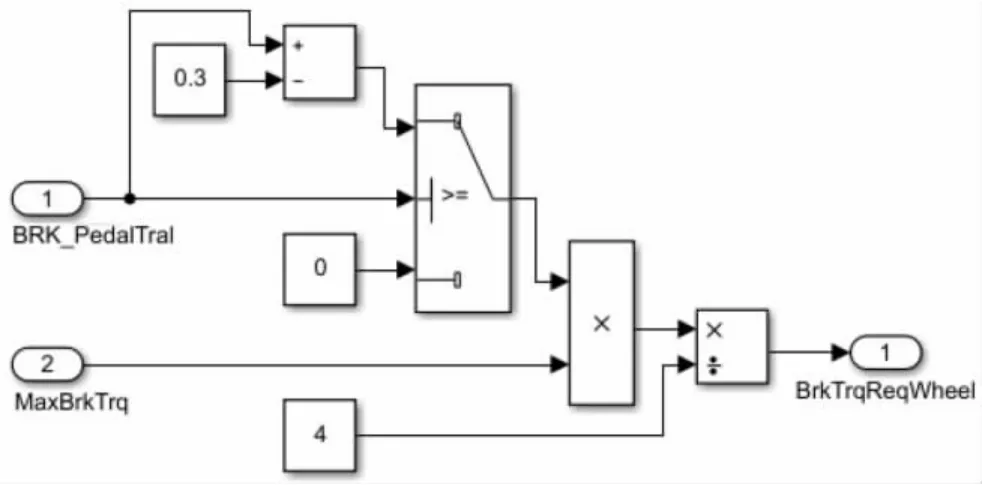
圖1 并聯(lián)式制動(dòng)系統(tǒng)中機(jī)械制動(dòng)扭矩的計(jì)算

式中:BRK_PedalTral——制動(dòng)踏板開度;MaxTrq-Gen——最大回收扭矩;Speed_Coff_eBrk——速度修正系數(shù);SOC_Coff_eBrk——SOC修正系數(shù)。
串聯(lián)式制動(dòng)系統(tǒng)則是優(yōu)先考慮使用電制動(dòng)力,在制動(dòng)需求達(dá)到一定值后,機(jī)械制動(dòng)同時(shí)介入,兩種制動(dòng)力相互協(xié)調(diào)達(dá)到系統(tǒng)總制動(dòng)需求[10]。串聯(lián)式制動(dòng)系統(tǒng)有較高的再生制動(dòng)效率,同時(shí)安全性和平順性較好,但是制動(dòng)控制邏輯復(fù)雜,需要對(duì)機(jī)械制動(dòng)進(jìn)行改造[11]。當(dāng)車輛處于串聯(lián)式制動(dòng)策略時(shí),首先計(jì)算制動(dòng)力需求,接著判斷電制動(dòng)是否滿足制動(dòng)力需求,若滿足則采用電制動(dòng),不滿足則優(yōu)先采用電制動(dòng),剩余制動(dòng)力需求由機(jī)械制動(dòng)補(bǔ)足[12]。具體步驟如下。
1)首先計(jì)算整車制動(dòng)需求扭矩。將整車制動(dòng)踏板開度轉(zhuǎn)化為制動(dòng)扭矩需求,并計(jì)算出當(dāng)前狀態(tài)下的電機(jī)端電制動(dòng)扭矩需求,計(jì)算過程如式(2)所示。

式中:BrkTrqReqWheel——輪端制動(dòng)扭矩需求;MaxBrkTrq——最大制動(dòng)扭矩;TrqReqMot——電機(jī)端制動(dòng)扭矩需求;TransRatio——速比;TransEfficiency——傳動(dòng)效率。
2)接著計(jì)算電制動(dòng)扭矩,計(jì)算過程如圖2所示。取電機(jī)端制動(dòng)扭矩需求與電機(jī)最大制動(dòng)扭矩兩者中的最小值,由于編程中回收扭矩為負(fù)值,所以編程中用max函數(shù)取兩者絕對(duì)值中的最小值。
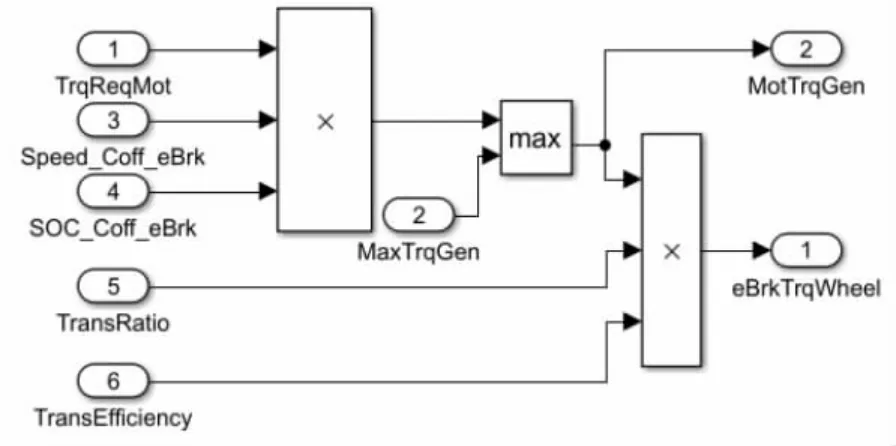
圖2 串聯(lián)制動(dòng)系統(tǒng)中電制動(dòng)扭矩計(jì)算
3)最后計(jì)算機(jī)械制動(dòng)力,計(jì)算過程如式(3)所示。

式中:BrkTrqReqWheel——輪端制動(dòng)扭矩需求;eBrk-TrqWheel——輪端電制動(dòng)扭矩。
1.2 串并聯(lián)制動(dòng)系統(tǒng)仿真對(duì)比
為比較并聯(lián)式制動(dòng)系統(tǒng)與串聯(lián)式制動(dòng)系統(tǒng)的性能,本文就一輛8.5m純電動(dòng)客車進(jìn)行Simulink與Cruise聯(lián)合仿真分析,整車參數(shù)見表1。將制動(dòng)控制策略的Simulink文件轉(zhuǎn)化為dll文件格式,在Cruise模型中導(dǎo)入該制動(dòng)策略文件,聯(lián)合仿真界面如圖3所示。

表1 整車參數(shù)
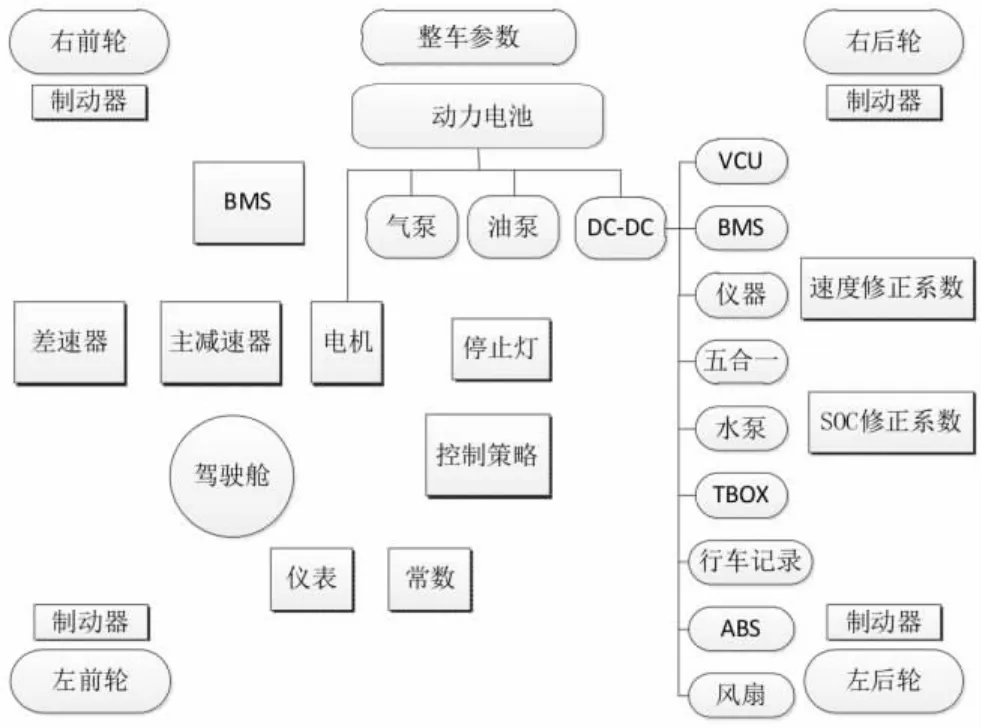
圖3 Simulink與Cruise聯(lián)合仿真
CHTC-B是中國(guó)普遍采用的一種城市客車工況,循環(huán)工況圖如圖4所示。在該工況下,在上述8.5m純電動(dòng)客車采用制定的并聯(lián)式制動(dòng)策略與串聯(lián)式制動(dòng)策略分別進(jìn)行仿真分析,可得到該客車在CHTC-B工況下SOC值的變化曲線(圖5),能耗數(shù)值如表2所示,電機(jī)扭矩變化如圖6所示。
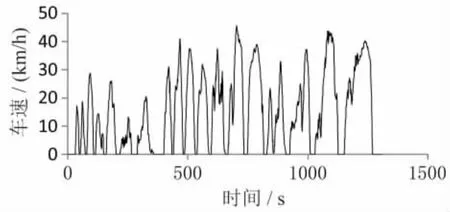
圖4 CHTC-B循環(huán)工況
從圖5和表2中可以看出,在CHTC-B工況下,相對(duì)于串聯(lián)式制動(dòng)系統(tǒng),并聯(lián)式制動(dòng)系統(tǒng)下SOC值下降較快,能耗值較高。圖6中串聯(lián)式制動(dòng)系統(tǒng)的回收扭矩也大于并聯(lián)式制動(dòng)系統(tǒng),因此上述結(jié)果表明串聯(lián)式制動(dòng)系統(tǒng)的回收效率要高于并聯(lián)式制動(dòng)系統(tǒng)。
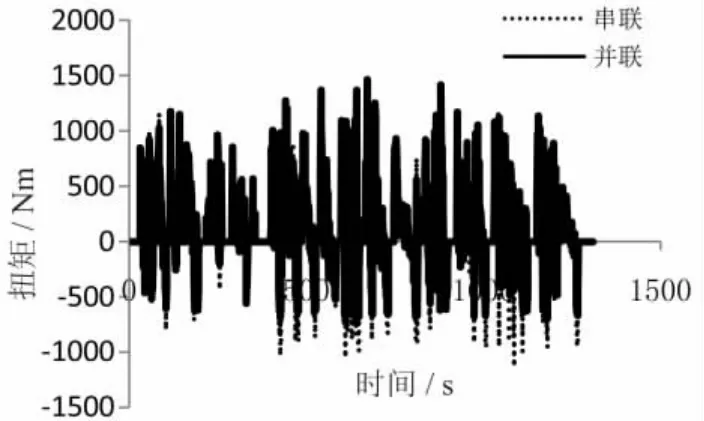
圖6 CHTC-B工況下兩種制動(dòng)策略電機(jī)扭矩變化

表2 CHTC-B工況下兩種制動(dòng)策略的能耗值
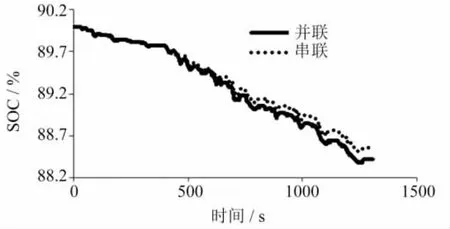
圖5 CHTC-B工況下兩種制動(dòng)策略SOC值的變化
2 實(shí)際路譜仿真與監(jiān)控?cái)?shù)據(jù)對(duì)比
2.1 公交路譜下仿真與監(jiān)控?cái)?shù)據(jù)對(duì)比
為了驗(yàn)證模型的準(zhǔn)確性,對(duì)比分析公交路譜的仿真結(jié)果與監(jiān)控平臺(tái)數(shù)據(jù),車型依然采用上述8.5m純電動(dòng)客車。由于公交車的線路都是固定的循壞路線,因此通過分析車輛監(jiān)控平臺(tái)數(shù)據(jù)可以對(duì)一輛公交車一天的行駛工況進(jìn)行統(tǒng)計(jì)分析,進(jìn)而做出實(shí)際路譜,如圖7所示。

圖7 實(shí)際路譜
實(shí)際車型采用的是并聯(lián)式制動(dòng)控制策略,同時(shí)根據(jù)實(shí)際使用情況在原并聯(lián)式控制策略中調(diào)整制動(dòng)和加速時(shí)電機(jī)扭矩的計(jì)算方法,即采用標(biāo)定的油門/制動(dòng)踏板開度-車速-電機(jī)扭矩map形式,如圖8所示。
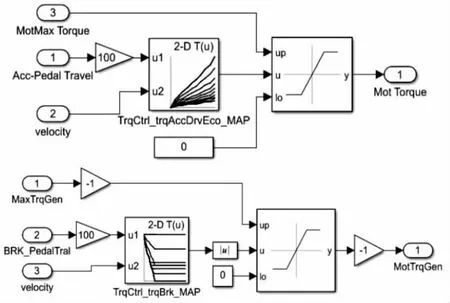
圖8 并聯(lián)式制動(dòng)控制中加速、制動(dòng)時(shí)電機(jī)扭矩的計(jì)算
考慮到車輛的附件能耗,仿真會(huì)與實(shí)際相差較大,因此為了驗(yàn)證模型的準(zhǔn)確性,不考慮附件,將仿真得到的踏板開度及電機(jī)扭矩結(jié)果與實(shí)際車輛在監(jiān)控平臺(tái)中對(duì)應(yīng)的數(shù)據(jù)進(jìn)行對(duì)比,如圖9、10所示。從圖9和圖10中可以看出,采用電機(jī)map的并聯(lián)式制動(dòng)仿真與實(shí)際數(shù)據(jù)有一定的誤差。為了驗(yàn)證該方法的誤差相對(duì)較小,也采用了之前的非map并聯(lián)式控制策略進(jìn)行對(duì)比,即不用電機(jī)map而采用踏板開度和扭矩直接相乘的形式,并將相同公交路譜下的仿真結(jié)果與實(shí)際數(shù)據(jù)進(jìn)行了對(duì)比,如圖11、12所示。兩種并聯(lián)式控制策略的仿真能耗對(duì)比結(jié)果如表3所示。
從圖9和圖11對(duì)比可知,兩種并聯(lián)式制動(dòng)踏板開度的結(jié)果都具有一定的誤差。對(duì)比圖10和圖12發(fā)現(xiàn),圖10中map并聯(lián)式控制策略模型通過采用標(biāo)定的電機(jī)map,能使電機(jī)的扭矩控制在1500Nm以內(nèi),減少了與實(shí)際電機(jī)扭矩的誤差,與圖12中非map并聯(lián)式控制仿真結(jié)果相比,效果更佳,誤差更小。同時(shí),表3中兩種并聯(lián)制動(dòng)策略的能耗仿真,也表明通過使用map并聯(lián)式控制策略,能有效降低能耗。

表3 公交路譜下兩種制動(dòng)策略的仿真能耗值
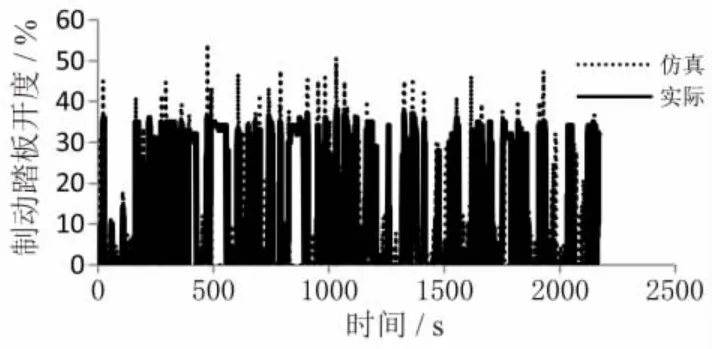
圖9 map并聯(lián)式:仿真制動(dòng)踏板開度與平臺(tái)數(shù)據(jù)對(duì)比
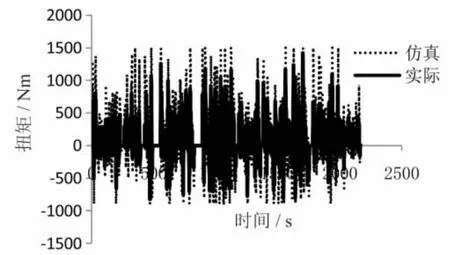
圖10 map并聯(lián)式:仿真電機(jī)扭矩與平臺(tái)數(shù)據(jù)對(duì)比
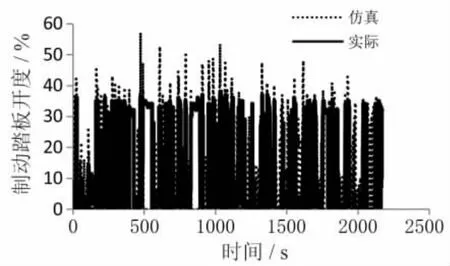
圖11 非map并聯(lián)式:仿真制動(dòng)踏板開度與平臺(tái)數(shù)據(jù)對(duì)比

圖12 非map并聯(lián)式:仿真電機(jī)扭矩與平臺(tái)數(shù)據(jù)對(duì)比
2.2 等速實(shí)驗(yàn)工況下仿真與測(cè)試數(shù)據(jù)對(duì)比
為了進(jìn)一步驗(yàn)證模型的準(zhǔn)確性,在等速40km/h工況下,依舊用map并聯(lián)式制動(dòng)進(jìn)行仿真,并與實(shí)驗(yàn)場(chǎng)測(cè)試數(shù)據(jù)對(duì)比。另選取一輛8.1m的純電動(dòng)公交車,其在等速40km/h路譜仿真時(shí),仿真結(jié)果顯示電機(jī)扭矩穩(wěn)定在95.8655Nm。實(shí)驗(yàn)場(chǎng)等速40km/h的路譜測(cè)試數(shù)據(jù)如圖13所示。在圖13中,選取虛線框中較為穩(wěn)定的一段,計(jì)算其平均值為96.2Nm,與仿真結(jié)果十分接近,因此進(jìn)一步證明了模型的準(zhǔn)確性。
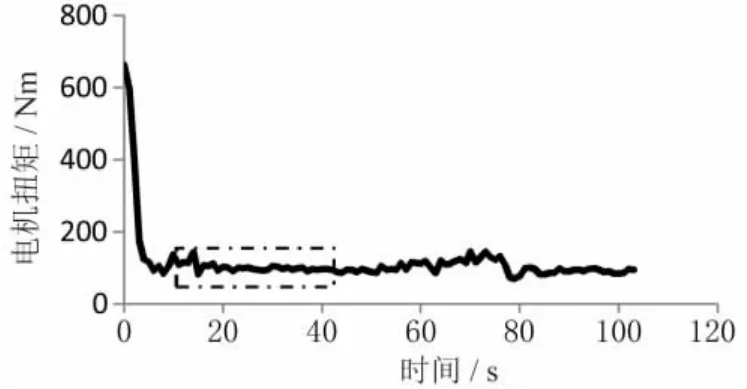
圖13 等速40km/h實(shí)驗(yàn)測(cè)試結(jié)果
3 結(jié)束語
本文通過研究串并聯(lián)式制動(dòng)控制策略,使用Matlab/Simulink與AVL Cruise聯(lián)合仿真分析,得出串聯(lián)式制動(dòng)控制策略相對(duì)于并聯(lián)式制動(dòng)控制策略的SOC值較高,能耗較低,效率更高的結(jié)論。同時(shí),根據(jù)實(shí)際使用情況,改進(jìn)并聯(lián)式制動(dòng)控制策略,在其中引入標(biāo)定的電機(jī)map,與監(jiān)控平臺(tái)數(shù)據(jù)對(duì)比,發(fā)現(xiàn)map并聯(lián)式制動(dòng)與實(shí)際平臺(tái)數(shù)據(jù)更接近,更貼合實(shí)際,而且能耗相較于非map并聯(lián)控制策略更低。最后,采用等速40km/h路譜進(jìn)行仿真與實(shí)驗(yàn)測(cè)試結(jié)果對(duì)比,進(jìn)一步驗(yàn)證了模型的準(zhǔn)確性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45