水泥原料無人值守輸送系統(tǒng)及其應(yīng)用
2023-02-07 06:16:30蔡照海
水泥技術(shù) 2023年1期
關(guān)鍵詞:設(shè)備
蔡照海
1 前言
我公司7 500t/d水泥熟料生產(chǎn)線輔料堆場有5臺堆取料機(jī),用于轉(zhuǎn)運輸送4種水泥原料,一直采用人工調(diào)車加半遠(yuǎn)程手動操作輸送物料,作業(yè)效率與生產(chǎn)安全完全取決于操作人員的熟練程度與操作方式。通過對設(shè)備進(jìn)行智能化改造,建立水泥原料無人值守輸送系統(tǒng),實現(xiàn)了水泥生產(chǎn)原料的科學(xué)存儲、精準(zhǔn)堆取、安全供應(yīng)及原料輸送的自動化、無人化,達(dá)到了減員增效的目的。
2 水泥原料無人值守輸送系統(tǒng)組成
水泥原料無人值守輸送系統(tǒng)主要由堆取料機(jī)精準(zhǔn)定位系統(tǒng)、激光雷達(dá)掃描系統(tǒng)、安全避碰防護(hù)系統(tǒng)、PLC集群控制系統(tǒng)等組成。
堆取料機(jī)精準(zhǔn)定位系統(tǒng)通過準(zhǔn)確計算堆取料機(jī)作業(yè)位置和調(diào)車位置,精準(zhǔn)定位堆取料機(jī)位置,為堆取料機(jī)三維掃描提供數(shù)據(jù)基礎(chǔ);激光雷達(dá)掃描系統(tǒng)通過掃描計算物料體積和空間位置,實現(xiàn)物料的可視化和數(shù)字化管理,同時結(jié)合精準(zhǔn)定位系統(tǒng)保證堆取料機(jī)之間的安全距離;安全避碰防護(hù)系統(tǒng)可提前預(yù)知并規(guī)避設(shè)備的碰撞隱患,提高設(shè)備使用安全性;PLC集群控制系統(tǒng)對水泥原料堆場的設(shè)備使用進(jìn)行集中控制,達(dá)到水泥原料輸送系統(tǒng)無人值守的目標(biāo)。
2.1 堆取料機(jī)精準(zhǔn)定位系統(tǒng)
(1)行走定位
我公司水泥原料輸送系統(tǒng)示意見圖1。水泥原料堆場中,原煤堆料機(jī)、輔料堆料機(jī)、輔料取料機(jī)1、輔料取料機(jī)2采用倍加福RFID與編碼器融合定位技術(shù),原煤取料機(jī)采用邁測L2激光測距傳感器和編碼器融合定位技術(shù),實現(xiàn)堆取料機(jī)行走的精準(zhǔn)定位。
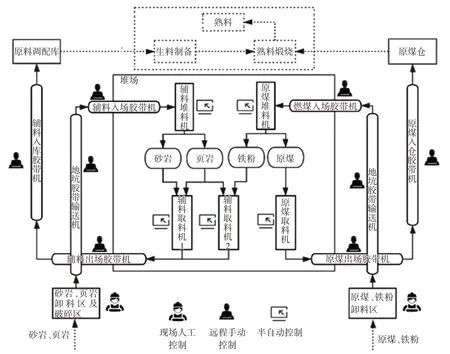
圖1 水泥原料輸送系統(tǒng)示意
堆取料機(jī)RFID行走定位基于無線射頻識別技術(shù),沿堆取料機(jī)行走軌道方向,每隔固定測量距離安裝若干RFID定位標(biāo)簽,行走堆取料機(jī)通過安裝于車輪附近的RFID讀寫器,讀取當(dāng)前標(biāo)簽的位置信息,修正堆取料機(jī)位置編碼器數(shù)值,實現(xiàn)堆取料機(jī)的精準(zhǔn)定位。RFID定位的優(yōu)點在于使用簡單,穩(wěn)定可靠;定位標(biāo)簽數(shù)量越多,安裝間隔距離越小,定位精度越高。RFID定位的缺點在于安裝施工量大,定位標(biāo)簽數(shù)量越多,成本則越高。
(2)俯仰定位
堆取料機(jī)的俯仰定位一般采用編碼器和傾角測量儀相融合的方式,傾角測量儀較多采用基于MEMS技術(shù)的三軸加速度計和三軸陀螺儀,測量儀安裝方便,測量精度可達(dá)0.1°。此外,亦有采用基于RTK技術(shù)及差分GPS技術(shù)進(jìn)行俯仰定位的方式,但這兩項技術(shù)的工程應(yīng)用成本較高,且與傾角測量儀相比,安裝部署較為不便。
我公司堆取料機(jī)俯仰角的測量采用倍加福F99-Fusion慣性測量單元和編碼器相結(jié)合的方案。
2.2 激光雷達(dá)掃描系統(tǒng)
堆取料機(jī)三維掃描技術(shù)主要包括視覺識別技術(shù)和激光雷達(dá)掃描技術(shù)。堆取料機(jī)視覺識別技術(shù)主要通過雙目視覺矯正方式實現(xiàn)堆取料機(jī)三維空間建模。該技術(shù)利用不同拍攝角度的圖片或視頻,通過立體匹配的方式獲取堆取料機(jī)三維信息,可有效利用現(xiàn)場已有監(jiān)控視頻信息進(jìn)行堆取料機(jī)三維空間建模,成本較激光雷達(dá)掃描技術(shù)低,但受限于拍攝角度定位差異,其三維空間建模精度不高。此外,由于該技術(shù)需對視頻信息展開大量的特征匹配計算,三維空間建模時間長,不能滿足堆取料自動作業(yè)的高實時性要求。
激光雷達(dá)掃描技術(shù)實施方式有三維激光雷達(dá)掃描和二維激光雷達(dá)掃描,三維激光雷達(dá)掃描一般基于當(dāng)前較為流行的“HDDM+升級型高分辨率距離測量”技術(shù),是比較理想的三維空間建模技術(shù),但價格高昂,不利于實際項目部署。
綜上,在水泥原料堆場物料三維空間建模應(yīng)用上,二維激光雷達(dá)掃描是目前較為適宜的選擇,其價格合理,技術(shù)成熟穩(wěn)定,被大量項目采用。
二維激光雷達(dá)掃描主要包括:固定云臺掃描、頂部掃描小車掃描、隨堆取料機(jī)機(jī)構(gòu)運行掃描等三個方面,需經(jīng)激光雷達(dá)掃描數(shù)據(jù)處理、堆取料機(jī)運行數(shù)據(jù)采集、時間同步、激光雷達(dá)坐標(biāo)系和堆場坐標(biāo)系坐標(biāo)矩陣轉(zhuǎn)換、三維坐標(biāo)數(shù)據(jù)網(wǎng)格規(guī)格化及空間插值等,最后生成物料可視化結(jié)果。
(1)采集數(shù)據(jù)和數(shù)據(jù)同步
激光雷達(dá)掃描數(shù)據(jù)是一組一定角度范圍內(nèi)測距數(shù)據(jù)的集合,測量角度范圍越大、角度分辨率越高,則采集數(shù)據(jù)量越大。因此,激光雷達(dá)掃描數(shù)據(jù)的傳輸一般采用以太網(wǎng)可靠性和實時性均較強(qiáng)的TCP-Socket通信傳輸技術(shù),PLC通信一般采用Mod?bus-TCP、TCP-Socket等方式。與激光雷達(dá)掃描數(shù)據(jù)相比,存儲于PLC內(nèi)的堆取料機(jī)運行數(shù)據(jù)量小、通信速度快,因此,激光雷達(dá)掃描數(shù)據(jù)需與堆取料機(jī)的運行數(shù)據(jù)進(jìn)行時間同步匹配,同步方式較多采用數(shù)據(jù)加時間戳及緩存讀取等方式。
(2)坐標(biāo)矩陣轉(zhuǎn)換
由于激光雷達(dá)掃描數(shù)據(jù)是一組角度數(shù)據(jù)和距離數(shù)據(jù)的集合,屬于極坐標(biāo)數(shù)據(jù),且位于雷達(dá)的局部坐標(biāo)系,需要結(jié)合堆取料機(jī)的行走、俯仰、回轉(zhuǎn)等數(shù)據(jù)進(jìn)行坐標(biāo)矩陣轉(zhuǎn)換,將局部坐標(biāo)系下的極坐標(biāo)形式雷達(dá)數(shù)據(jù)轉(zhuǎn)換為堆場全局坐標(biāo)系下的笛卡爾坐標(biāo)形式的數(shù)據(jù)。極坐標(biāo)數(shù)據(jù)見圖2,數(shù)據(jù)同步變換見圖3,笛卡爾坐標(biāo)變換見式(1),堆場坐標(biāo)矩陣變換見式(2),數(shù)據(jù)參數(shù)含義見表1。
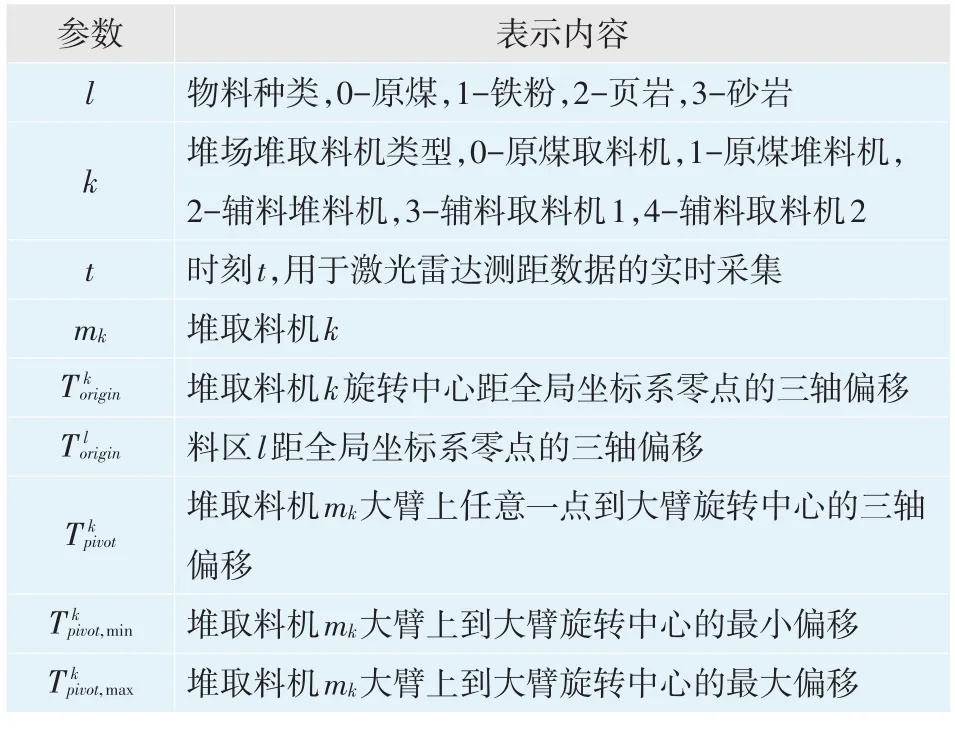
表1 數(shù)據(jù)參數(shù)含義
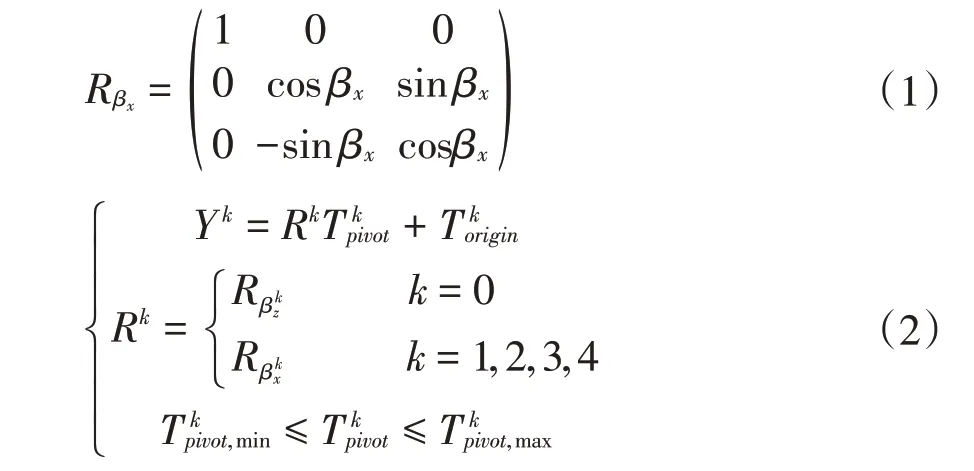

圖2 極坐標(biāo)形式雷達(dá)數(shù)據(jù)轉(zhuǎn)換為堆場全局坐標(biāo)系下的笛卡爾坐標(biāo)形式數(shù)據(jù)
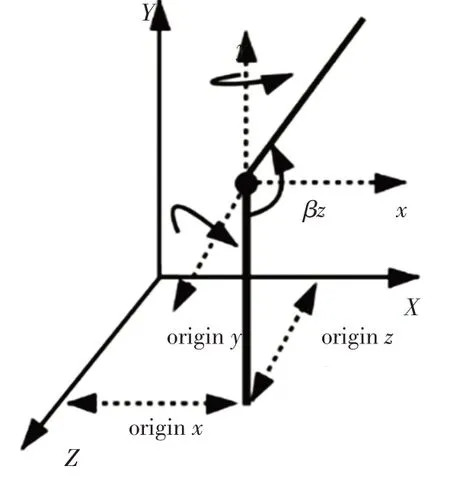
圖3 數(shù)據(jù)同步變換
(3)“點云”網(wǎng)格化及空間插值
經(jīng)坐標(biāo)轉(zhuǎn)換及濾波處理完成后,激光雷達(dá)掃描數(shù)據(jù)變成了三維笛卡爾坐標(biāo)系下“點云”數(shù)據(jù)。此“點云”數(shù)據(jù)在二維平面下的投影雜亂、不均勻,不便于后續(xù)堆取料機(jī)自動作業(yè)算法的實施和其三維可視化的呈現(xiàn),需進(jìn)行網(wǎng)格規(guī)格化(以右手坐標(biāo)系為例,Y方向為物料高度方向),即,將XOZ平面分割成等尺寸的均勻網(wǎng)格,長寬皆為dxz,初始高度皆為0(y=0),經(jīng)算法處理后,散亂的“點云”數(shù)據(jù)在XOZ平面上被放置在網(wǎng)格交點上,“點云”數(shù)據(jù)網(wǎng)格化一般有反距離平均、鄰域搜索等算法。網(wǎng)格化插值計算見圖4。
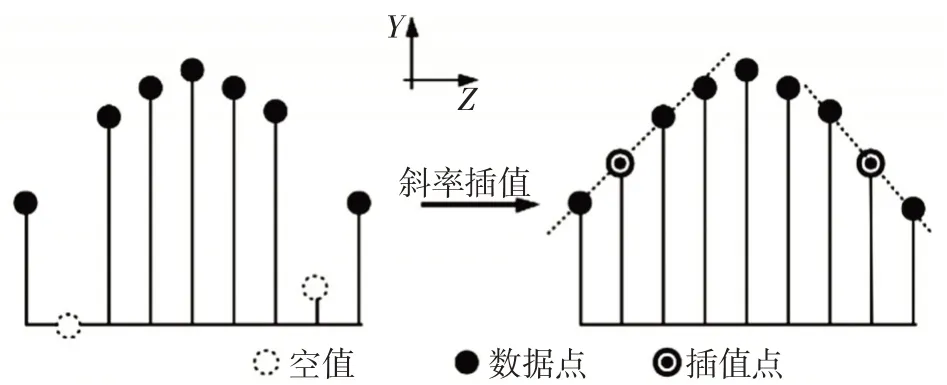
圖4 網(wǎng)格化插值計算
2.3 安全避碰防護(hù)系統(tǒng)
設(shè)備安全避碰一般包括基于硬件的被動避碰和基于軟件的主動避碰兩種方式。
2.3.1 被動式避碰
設(shè)備的被動式避碰,主要是指利用安裝在設(shè)備上的限位開關(guān)、碰撞開關(guān)、超聲波測距儀等檢測設(shè)備碰撞狀態(tài),被動執(zhí)行報警、停機(jī)及退回等操作,屬于較低級的安全避碰措施。我公司原料堆場輸送系統(tǒng)采用超聲波和拉繩開關(guān)等設(shè)備,實現(xiàn)堆取料機(jī)與物料、堆取料機(jī)與堆取料機(jī)間的被動式避碰。
2.3.2 主動式避碰
在被動式避碰的基礎(chǔ)上,設(shè)備的主動式避碰是指利用精準(zhǔn)定位技術(shù)、三維空間建模信息、設(shè)備空間尺寸信息等,計算設(shè)備與設(shè)備、設(shè)備與物料將要發(fā)生碰撞的特征點位置,并給出設(shè)備避碰策略控制指令,實現(xiàn)設(shè)備在自動作業(yè)過程的安全避碰。主動式避碰主要包括以下幾種實施方法:
(1)平面投影法
對堆取料機(jī)進(jìn)行地面投影,將三維避碰問題轉(zhuǎn)化為二維避碰問題。該方法計算簡單,在避碰精度要求不高的情況下,具有一定的實用性,但不適用于我公司輸送系統(tǒng)的高精度避碰要求。
(2)空間機(jī)構(gòu)學(xué)計算法
將堆取料機(jī)簡化為近似空間線段,計算此空間線段的位置數(shù)據(jù)。一般情況下,該技術(shù)的避碰準(zhǔn)確性高于平面投影法,但由于其忽略了堆取料機(jī)的外形、厚度、尺寸和不規(guī)則特性,在某種情況下,避碰效果較差。
(3)包圍盒檢測法
相比于前兩種方法,包圍盒檢測法(特別是矩形包圍盒檢測法)較好地考慮了堆取料機(jī)的厚度、寬度等尺寸信息,一定程度提高了堆取料機(jī)避碰效果,但該方法同樣未考慮堆取料機(jī)外形的不規(guī)則性,在某種特定工況下,其避碰效果不佳。
綜上分析,本系統(tǒng)采用了對堆取料機(jī)大臂進(jìn)行網(wǎng)格化的創(chuàng)新方法,并對堆取料機(jī)進(jìn)行了完整的空間數(shù)學(xué)建模,采用預(yù)先測算堆取料機(jī)與堆取料機(jī)、堆取料機(jī)與物料間的三維距離信息的方式,提前預(yù)知并規(guī)避碰撞隱患,屬于比較超前且智能的安全避碰措施,極大地提高了設(shè)備使用的安全性。設(shè)備之間及設(shè)備與物料避碰示意見圖5。
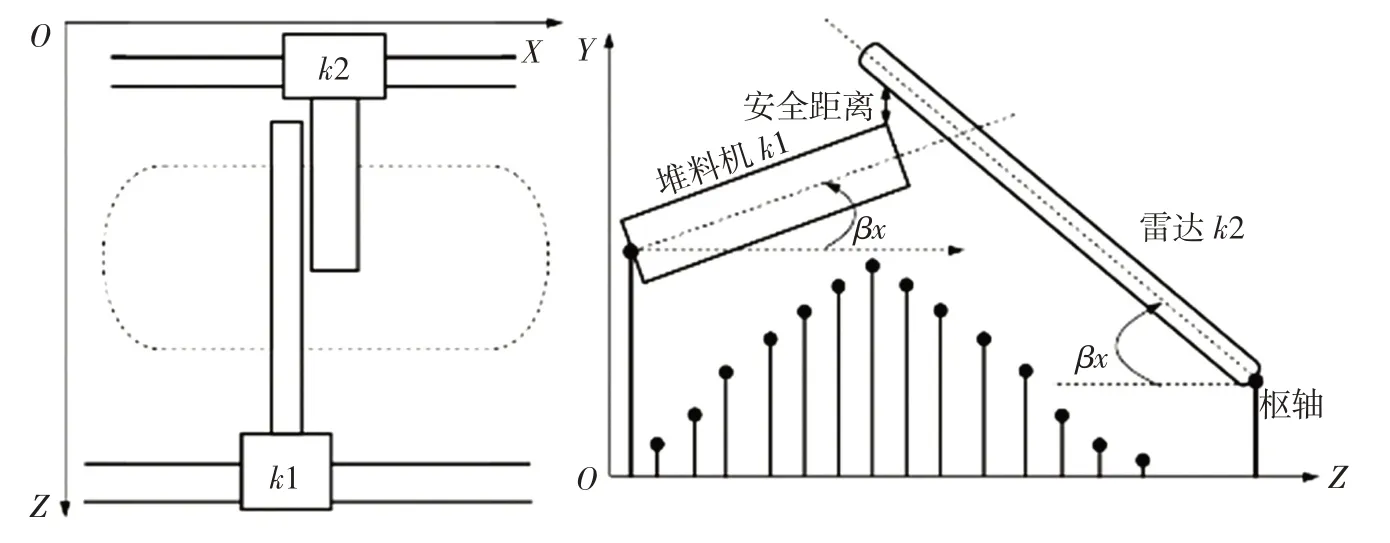
圖5 設(shè)備之間及設(shè)備與物料避碰示意
2.4 PLC集群控制系統(tǒng)
PLC集群控制系統(tǒng)是指通過計算機(jī)調(diào)度算法對PLC進(jìn)行集中控制,將原料堆場所有設(shè)備看作是一個集群,從而將5臺堆取料機(jī)設(shè)備的20多種調(diào)車方式從手動控制變?yōu)樽詣涌刂啤1竟驹陷斔蚉LC控制系統(tǒng)采用西門子S7-1200系列產(chǎn)品,通過現(xiàn)場的無線網(wǎng)絡(luò),經(jīng)網(wǎng)關(guān)連接到中控S7-1500 PLC系統(tǒng)。PLC集群控制系統(tǒng)架構(gòu)見圖6。
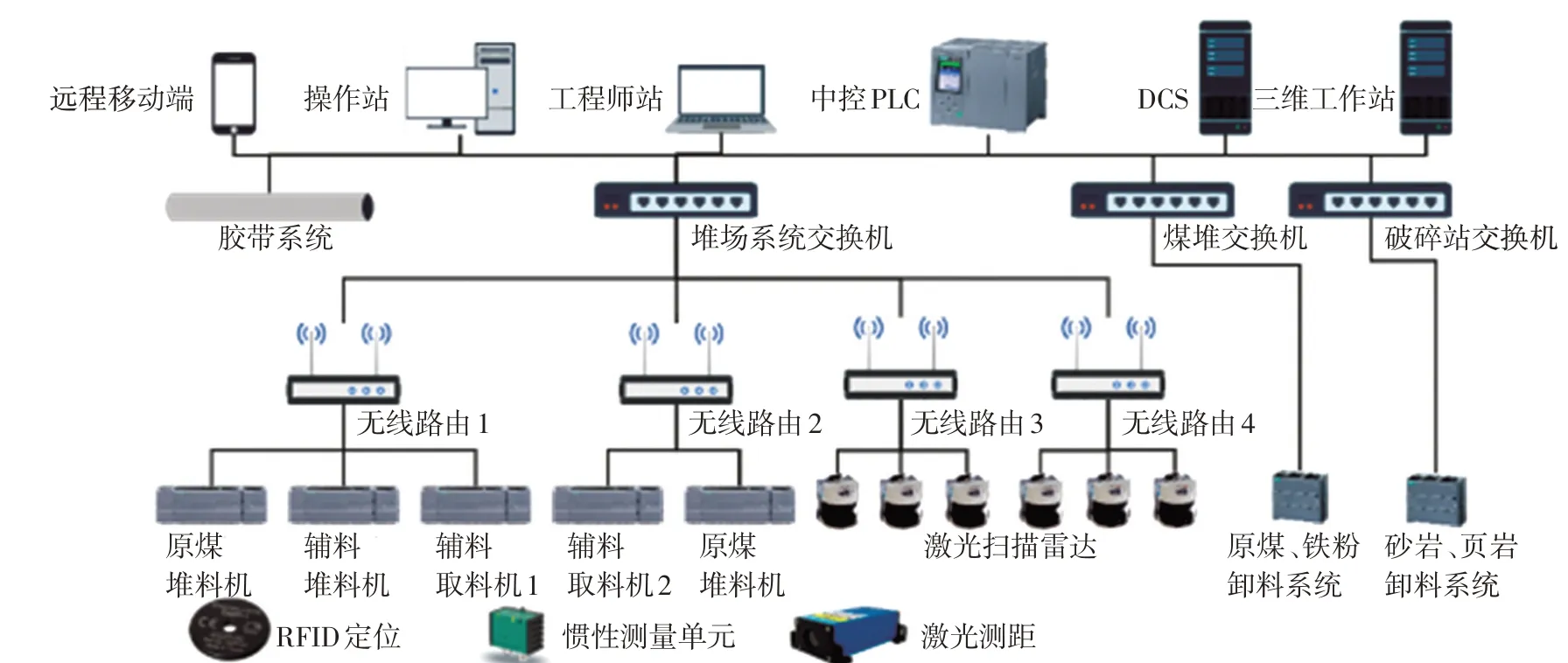
圖6 PLC集群控制系統(tǒng)架構(gòu)
3 應(yīng)用效果
水泥原料輸送無人值守系統(tǒng)是一種全自動、智能堆取料系統(tǒng),該系統(tǒng)在我公司水泥生產(chǎn)線成功應(yīng)用,實現(xiàn)了堆取料機(jī)自動識別料堆、自動尋址定位、自動作業(yè),操作員僅需在中控室監(jiān)控整個料場的設(shè)備自動運行情況即可。
本文以三維掃描數(shù)據(jù)流為基礎(chǔ),建立了水泥原料輸送系統(tǒng)模型,經(jīng)過現(xiàn)場實際測試,實現(xiàn)了大型水泥廠生產(chǎn)工藝中水泥原料輸送的自動化、無人化,提高了水泥生產(chǎn)的智能化水平和生產(chǎn)效率。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年13期)2020-09-27 23:04:20
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(shù)(2017年11期)2017-12-20 08:10:57
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:28
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00