基于遺傳算法對控制水下機器人運動姿態進行PID參數整定
2023-02-04 12:00:24鄧魯克呂東坡
制造業自動化
2023年1期
鄧魯克,呂東坡
(天津大學 海洋技術學院,天津 300072)
0 引言
水下機器人在海洋、湖泊、河流等水下作業的應用越來越廣泛,其中有纜水下機器人(Remotely Operated Vehicle,ROV)由于其具有操作靈活、可實時傳輸數據等優點得到了廣泛的應用。同時,水下機器人的穩定性也提出了更高要求,獲取水下機器人的運動控制方程以及采取響應速度更快的控制策略變得至關重要[1,2]。
1 ROV的運動控制分析
1.1 ROV平面運動方程的簡化
ROV在水中運動情況較為復雜,為了能夠便于分析研究,根據艏向角和深度的變化將ROV的運動情況分為水平面與垂直面。ROV在水平面運動時,只改變艏向角,深度不會改變;在垂直面運動時,只會改變深度,艏向角不會改變,由于本次主要研究ROV姿態的控制,所以主要對艏向角進行研究。
在進行簡化之后,水下機器人在水平面的運動方程為[3]:
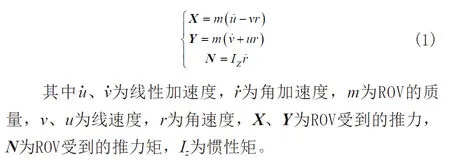
其中,X、Y、N與u、v、r方向相同,推進器1、3和推進器2、4提供的推力相反,推進器產生的合力為各個推進器提供的力之和:

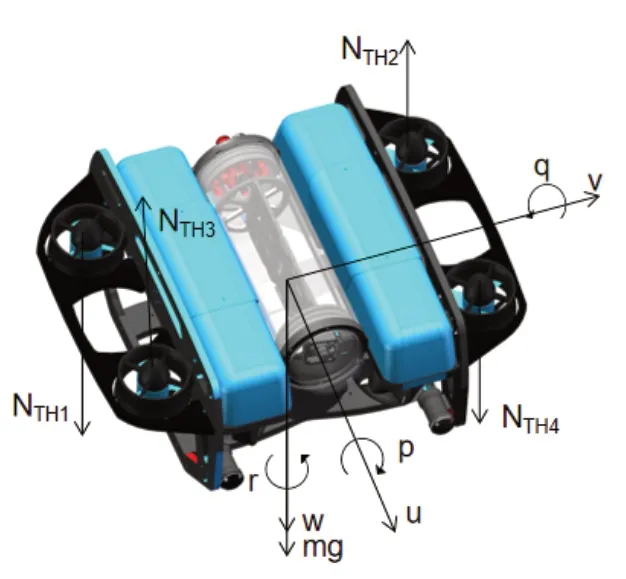
圖1 ROV的三維模型
ROV的水動力模型為:

M是ROV的質量矩陣;是附加質量;
CRB(V)是ROV的科式力和向心力矩陣;
D(V)V為ROV水阻尼矩陣;
G(η)為由靜力產生的回復力(矩)向量;
T為推力系統產生的推力(矩)。
由于本次研究主要針對ROV的運動控制方程以及控制方法,所以水動力系數以及其余相關矩陣由仿真實驗得到的數據直接給出。
將式(1)和式(2)代入式(3)可得:
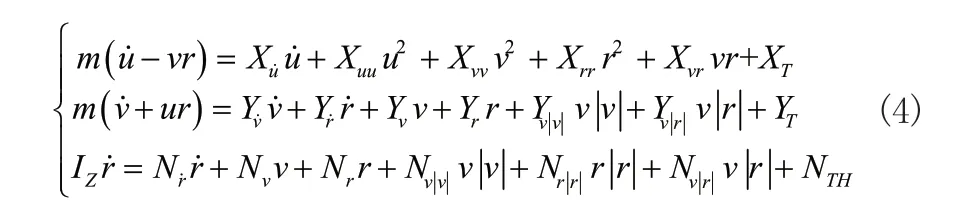
在理想的情況下,由于ROV的模型左右完全對稱,直航情況下ROV不會有u和r。但在實際情況下,ROV直航可能會由于外界擾動,在水平面內除了會有u,還可能會有v和r,但是v和r數值較小,其乘積更可以忽略。……
登錄APP查看全文
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
少先隊活動(2021年4期)2021-07-23 01:46:22
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
現代企業(2015年2期)2015-02-28 18:45:09