基于LabVIEW的磁阻自動優化測量系統*
2023-02-02 05:23:34吳東陽姚志宏
傳感器與微系統 2023年1期
吳東陽, 姚志宏
(1.中國科學院 微電子研究所,北京 100029; 2.中國科學院大學,北京 100049; 3.中國科學院 微電子器件與集成技術重點實驗室,北京 100029)
0 引 言
測試磁阻效應需要控制磁場、讀取磁場、設定角度、施加電流、讀取電壓等功能,這些功能缺一不可,并且需要較高的精度。傳統的手動測量,曲線上的每一個點的測試與數據處理都費時費力。為統合這些功能,現代測試主要通過計算機聯系和控制各個儀器,能做到像一個儀器一樣使用,這便是虛擬儀器[1]的由來。通過編程使現實中的各種儀器模塊化到程序中,它們的數據由程序統合處理,能實時呈現并易于交互。對于有磁場變化的測試,因磁場的變化引起的感生電動勢與磁滯效應使磁場掃描的每個點都需要等待秒(s)級的弛豫時間,因而測試采樣的點間距(分辨率)與點數對測試效率的影響至關重要。并且在磁阻的測試時,時常能遇到在大部分區域曲線平緩,而特定區域變化迅速的情況。
為了增加變化快速區域的分辨率,本文通過算法,編程實現自動優化分辨率的功能,大大提高了測試效率。
1 測試原理
磁阻效應[2]是如鐵磁材料在外加磁場影響下的電阻值,并且其隨外加磁場大小、方向的變化而變化的一種效應。磁阻有多種特性分類,如在鐵磁體中的各向異性磁阻(AMR)、疇壁磁阻(DWMR)和自旋霍爾磁電阻(SMR),在多層膜(例如磁隧道結)中的巨磁阻(GMR)、隧道磁阻(TMR)和巨大磁阻(CMR)等[3~8]。
以自旋霍爾磁電阻[9]為例
(1)
式中 自旋霍爾效應的強度可由Δρ/ρ0表征,電阻率ρ(Ω·m)可由電阻R(Ω)求得,ΔR(Ω)為大值Rmax(Ω)減最小值Rmin(Ω)的量。
2 磁阻測試系統開發
2.1 總體設計方案
本文中設計方案的實現,依靠于上位機上的LabVIEW軟件環境,通過其特有的圖形化編程方式,實現了對各個功能模塊的統籌控制、數據收集處理和反饋,并能進行實時交互。而與儀器的通信,是由其自帶的VISA這一極具效率的應用程序編程接口(API)統一實現的,并不需要了解各種接口類型的低級通信協議。再由于模塊化編程,各模塊之間相對獨立,大大減小了復雜度與耦合度,更利于程序的維護與功能的更新,并且對于不同的硬件平臺也能快速地遷移部署。
下位機在磁阻測試中共實現了4個功能:1)由功率電源、電磁鐵和特斯拉計實現的有反饋的磁場產生;2)由步進電機控制轉動器而實現的角度轉動;3)由精密電流源輸出的特定測試電流;4)由精準電壓表讀取的實際電壓。磁阻測試系統的簡要流程如圖1所示。
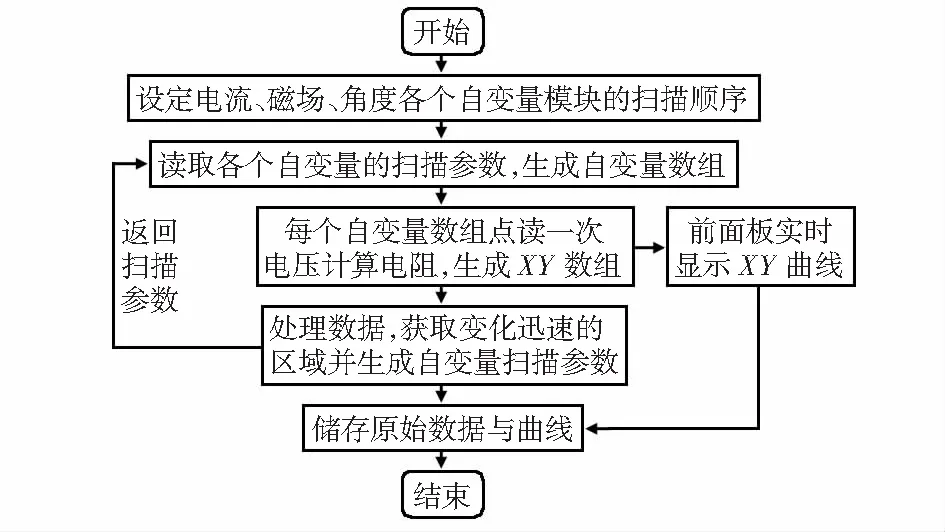
圖1 簡要測試流程
2.2 虛擬儀器具體設計
2.2.1 自動優化分辨率模塊
PICKPOINT自動優化分辨率程序模塊是本測試系統中最主要的創新。PICKPOINT的LabVIEW簡要程序模塊如圖2所示。
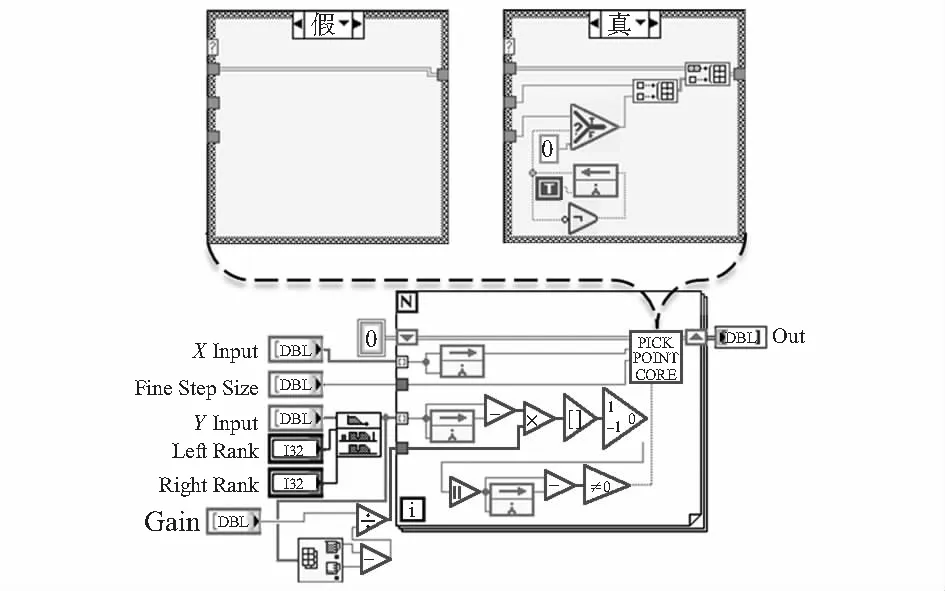
圖2 自動優化分辨率簡要程序模塊
為實現自動加密變化迅速區域的采樣間隔,先要進行較為快速的初掃描,然后由輸入控件XInput和YInput分別傳入初掃描的XY數組。而進入for循環框前還需要Fine Step Size傳入加密的采樣間隔,用Left Rank、Right Rank為參數的中值濾波器來降噪的YInput,最后是由增益Gain和降噪后YInput的最大最小值綜合獲得的是否為變化迅速區域的判斷條件。
TCL11公斤免污式全自動變頻洗烘一體滾筒洗衣機采用獨特的陀飛輪旋鈕,每次洗衣帶來美好觸感,配合和炫音樂,讓洗衣變成享受。140°廣角開門,方便取衣。
進入For循環框后,將第T+1次點與第T次點的差值(類比于一階導數)減去第T次點與第T-1次點的差值,其結果(類比于二階導數)受增益Gain和降噪后的最大最小值綜合調控,而其是否為0,則作為PICKPOINT CORE條件框的判斷依據。若其值為0,則進入條件框為“真”的模塊;反之,則進入條件框為“假”的模塊。只有條件框為“真”的模塊會往移位寄存器中添加變化迅速區域的起始與加密后的采樣間隔,最終輸出到Out。
在實際應用中還需要添加更多的參量和程序,例如兩個快速變化區域之間的采樣密度和原本掃描范圍的兩端也需要保存下來才能獲得完整的自動優化分辨率后的掃描參數。
2.2.2 磁場控制模塊
為了使用電磁鐵產生磁場,需要為其提供電流,而恒定的電流通過能在鐵芯中心部分產生較為均勻的靜磁場。因此,可以擬合一組在平衡狀態下的電流與磁場的關系,根據安培定律兩者是線性的關系。但由于磁滯的存在,在掃描磁場時,當前的磁場與之前的電流I(t-tc)還有時間t都相關。因此使用反饋來實現較為精確磁場控制。這個控制磁場的LabVIEW程序FIELD CONTROLER,如圖3所示。
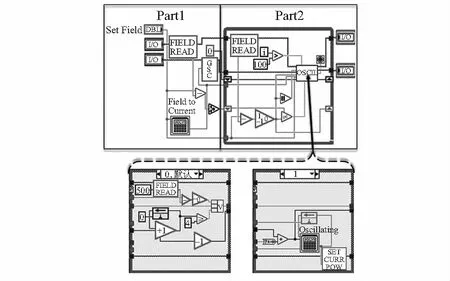
圖3 磁場控制程序模塊
在圖3的Part 1部分中,由Set Field傳入目標磁場,通過Field to Current公式模塊線性變成電流值,再通過GSC模塊階梯地變化電流(快速頻繁變化的電流因楞次定律使功率電源處于過負載狀態影響儀器壽命與安全),接著,電流通過電磁鐵而獲得初步磁場(實際上由于設置精確磁場的時間成本太高,在掃描的自變量為磁場時,運行到這一步大都能滿足需求)。
Part 2中,使用While循環框不停判斷結束循環條件,其中,有2個結束條件在OSCIL模塊的第“0”幀內,分別是等待0.5 s后FIELD READ模塊檢測磁場不變(進入第“0”幀的條件是檢測磁場與目標磁場相同)和進入第“0”幀4次。循環時若檢測磁場與目標磁場不相同則進入第“1”幀,通過Oscillating公式計算下一個目標電流從而振蕩逼近目標磁場。最后,若循環計數超過100但檢測磁場仍未收斂到目標磁場則亦會結束循環。一般運行完這個磁場控制程序,磁場結果誤差在±0.5Oe以內,誤差原因應包括磁滯效應與功率電源的精度不足。
ROTATOR程序模塊有幾種主要的功能:1)MOTOR的步進電機轉動控制功能;2)ROT MODE的模式選擇功能;3)DELAY的等待轉動結束功能;4)通過Rotator position顯示和反饋節點儲存角度功能。ROTATOR的LabVIEW程序模塊如圖4所示。

圖4 步進電機轉動器程序模塊
MOTOR模塊實際上只接收ROT MODE傳入的正負轉動角度和Rotation speed傳入的轉動速度,后轉化成步進電機能執行的16進制代碼從而實現轉角功能,但并不會反饋當前的角度與是否完成轉動,是一個功能單一的核心。
ROT MODE模塊中有3種模式,即Rot、Pos和Set pos模式。ROTATOR程序模塊使用前需要初始化反饋節點,即角度調零后再啟動,而使用中調零的情況,則需要通過ROT MODE的Set pos模式。Set pos模式是通過將Position的值傳給Rotator position顯示和反饋節點儲存,并將0作為轉動角度傳給MOTOR模塊(即不轉動)來實現的。Rot模式會直接將Rotation的值作為轉動角度傳給MOTOR模塊,而Pos模式會將Position的值與當前儲存角度的差作為轉動角度傳給MOTOR模塊,來實現轉動當前位置到Position值的位置。DELAY模塊包含擬合得到的絕對轉動角度與結束時間關系(步進電機的加、減速的階段,使它們并不是簡單的線性關系),其會將輸入的絕對轉動角度轉化為時延。在程序運行時,還會將轉動的角度與當前位置的和會被轉換到±360°內,然后,被顯示控件Rotator position顯示和反饋節點儲存。
2.2.4 其余的程序模塊
本文系統中還有一些程序模塊未說明,例如電流脈沖高度掃描程序PLUSE、串口磁場強度讀取程序FIELD READ、將掃描參數轉換為采樣點數組的SWEEP X程序、將多個自變量掃描程序相互整合的連續運行程序CONTINUOUS RUNNING、能自動保存實驗數據與圖片的SAVEFLE程序(內含正則提取參數到文件名并判斷路徑與文件是否存在功能)等。這些模塊相互配合在整個系統中起著重要作用。
3 測試系統驗證
3.1 前面板示例
LabVIEW的前面板是和用戶交互的界面,測試的參數輸入和結果呈現都可由前面板實現。簡要磁阻測試的前面板如圖5所示。其中的測試器件是在硅/氧化硅基片上磁控濺射5 nm的NiFe薄膜,然后使用光刻與離子束刻蝕得到長50 μm,寬10 μm的霍爾棒器件。測試時是掃描磁場,且磁場在面內與電流垂直,檢測電壓為縱向電壓,如圖6(a)所示。

圖5 簡要磁阻測試前面板

圖6 電流磁場電壓測試關系
3.2 自動優化分辨率示例
在圖7中展示了自動優化的成果。測試器件先是在硅/氧化硅基片上依次磁控濺射8 nm 的Ta,1.2 nm的CoFeB,2 nm的MgO和3 nm的Ta,獲得有垂直各向異性的CoFeB,之后使用光刻與離子束刻蝕圖型化成霍爾棒。本示例的掃描自變量更換為掃描電流脈沖的高度,即通過掃描脈沖高度漸變的電流獲取由自旋軌道矩(SOT)[10]引起的翻轉電流,其脈沖寬度為1 ms。測試時磁場在面內與電流平行,檢測電壓為橫向電壓,如圖6(b)所示。且進行了2次自動優化,分別是從第一次的采樣間隔Δx=100 μA到10 μA和第二次從10 μA到1 μA。其中,Enlarged圖能很好地看出第二次優化后相比第一次有10倍的分辨率,相比于未優化的曲線更是有100倍的分辨率。
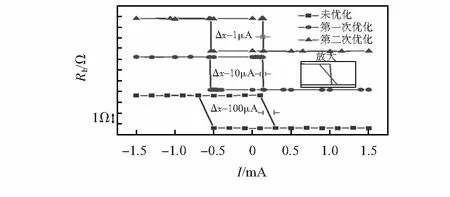
圖7 自動優化的垂直各向異性磁阻電流翻轉曲線
4 結 論
本文介紹了一種能自動優化分辨率和高度模塊化的磁阻測試系統。在掃描磁場的測試中,每個采樣點等待時間過長的問題,在優化分辨率后能夠得到很好的改進。而高度模塊化的系統,增加了易讀性減少了復雜度。且正如文中磁場掃描和電流脈沖掃描的轉換一樣,模塊之間的相互更換與結合能簡易地實現不同的功能,甚至還能實現更為復雜的功能,例如多自變量自動測量與優化,從而使測試效率大大增加。目前的系統包含了磁場與電流的施加與檢測,之后如遇到例如增加光照或壓力這樣的硬件平臺增改,也能通過模塊化編程快速且平穩地遷移部署。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
房地產導刊(2022年5期)2022-06-01 06:20:14
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中國科技論壇(2017年7期)2017-07-25 08:49:53
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24