智能網(wǎng)聯(lián)車路口行駛的決策策略分析
2023-01-31 02:12:38王健民
汽車實(shí)用技術(shù) 2023年1期
王健民,施 衛(wèi),張 宇
(江蘇理工學(xué)院 機(jī)械工程學(xué)院,江蘇 常州 213001)
人們?yōu)榱顺鲂蟹奖悖褂闷嚨谋壤谥鹉暝黾樱越煌ㄊ鹿屎徒煌〒矶鲁蔀榱擞脩舫鲂欣_。尤其城市的交通路口是駕駛員行駛問題發(fā)生的重災(zāi)區(qū)。目前解決交通路口的行駛方案,主要是在交通路口設(shè)置交通信號燈和行車智能助手語音播報,雖然有效減少了交通事故的發(fā)生,但依然無法解決擁堵情況和駕駛員大量時間浪費(fèi)。本文以復(fù)雜的交通路口作為研究背景,介紹智能網(wǎng)聯(lián)車在不同交通情況下執(zhí)行合理、安全性的行駛策略。
本文對智能網(wǎng)聯(lián)車路口行駛決策展開研究,外部環(huán)境的變化直接影響著駕駛行為決策結(jié)果的正確性。本文選取一類人駕駛經(jīng)驗樣本數(shù)據(jù)集和車輛駕駛行為樣本數(shù)據(jù)集分別作為條件屬性和決策屬性,以電動汽車作為研究載體,通過相機(jī)、雷達(dá)、全球定位系統(tǒng)(Global Positioning System,GPS)等車載傳感器,獲取“人-車-路”的行駛周圍環(huán)境信息,來大大提高行駛決策的實(shí)時性和準(zhǔn)確性[1-2]。實(shí)現(xiàn)在各種復(fù)雜行駛工況下智能網(wǎng)聯(lián)車的行駛安全,為智能網(wǎng)聯(lián)車在不同行駛環(huán)境下提供了多種相對應(yīng)的行駛策略系統(tǒng)。
1 智能網(wǎng)聯(lián)車
隨著人工智能化的不斷進(jìn)步,汽車產(chǎn)業(yè)也不斷向智能化、網(wǎng)聯(lián)化的方向發(fā)展,無人駕駛的理念也在完善。我國用戶對于智能網(wǎng)聯(lián)汽車的使用也增多,并且政府也大力支持智能網(wǎng)聯(lián)車的研發(fā),智能網(wǎng)聯(lián)車在未來有巨大的發(fā)展?jié)摿Α?/p>
新時代智能化的發(fā)展讓無人駕駛技術(shù)也越來越成熟,現(xiàn)階段無人駕駛技術(shù)主要應(yīng)用在智能網(wǎng)聯(lián)汽車[3]。智能網(wǎng)聯(lián)汽車的發(fā)展無疑是汽車產(chǎn)業(yè)的研發(fā)重點(diǎn)關(guān)注對象,其涉及眾多學(xué)科技術(shù)以促進(jìn)智能網(wǎng)聯(lián)汽車的兩個關(guān)鍵技術(shù):智能化和網(wǎng)聯(lián)化的發(fā)展[4],如圖1所示。無人駕駛作為新型技術(shù),國家為了人民更好的駕駛安全性和舒適性,在大數(shù)據(jù)互聯(lián)網(wǎng)和智能化的背景下,大力支持自主車企業(yè)和學(xué)科研發(fā)人員,加大對智能網(wǎng)聯(lián)汽車的發(fā)展投資力度。
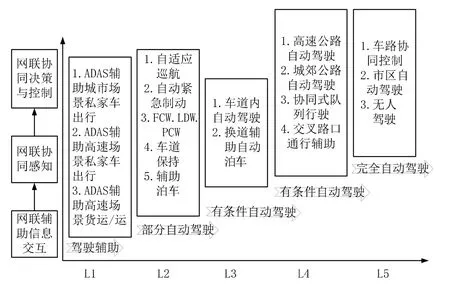
圖1 智能網(wǎng)聯(lián)的發(fā)展趨勢路徑
2 駛決策系統(tǒng)簡介
2.1 設(shè)計要求
智能網(wǎng)聯(lián)車的行駛決策系統(tǒng)以安全、合理性為行駛目標(biāo)通過各種行駛環(huán)境。對于行駛決策設(shè)計要求主要分為以下幾點(diǎn):乘員舒適性(車輛轉(zhuǎn)向穩(wěn)定性、平順性等);安全性和合理性要設(shè)定優(yōu)先級順序;可以人為選擇的決策能力(滿足駕駛員在行駛中想要的駕駛決策作為最高優(yōu)先級);系統(tǒng)的實(shí)時性。對于無人駕駛車行駛在復(fù)雜的交通工況下的行為決策系統(tǒng),設(shè)計準(zhǔn)則還要規(guī)范在國家制定的交通法規(guī)下做出相應(yīng)的行駛決策[5]。
2.2 輸入與輸出
智能網(wǎng)聯(lián)車的無人駕駛分為感知、規(guī)劃、執(zhí)行三個部分,感知模塊獲取的信息作為行駛決策的輸入,其包括以下信息:
(1)局部環(huán)境信息,通過相機(jī)、雷達(dá)等車載傳感器,獲得各傳感器數(shù)據(jù)處理融合,實(shí)時、準(zhǔn)確的獲取車輛行駛的環(huán)境狀態(tài),整理出需要的環(huán)境信息輸出給下層系統(tǒng)進(jìn)行分析設(shè)計。
(2)自車定位信息,其基于高精度地圖定位、GPS、實(shí)時的完善架構(gòu)地圖和定位車子信息[5]等方法,主要功能是對車輛進(jìn)行高精度定位。
(3)全局環(huán)境信息,以初始地點(diǎn)到目標(biāo)點(diǎn)的行駛路線包括全局路徑、交通標(biāo)志信息以及交通道路行駛過程中一切影響因素。
路徑規(guī)劃模塊是解決智能網(wǎng)聯(lián)車如何達(dá)到行駛目標(biāo)的上層系統(tǒng),主要分為兩類規(guī)劃形式:
(1)基于環(huán)境先驗信息的全局規(guī)劃,主要的研究方法有網(wǎng)格法、視圖法等。
(2)基于傳感器信息的局部規(guī)劃,主要的研究方法有人工勢場法、遺傳算法、空間搜索法等。
上層感知得到的環(huán)境信息傳輸給決策模塊后,得到?jīng)Q策規(guī)劃的信息輸入給執(zhí)行模塊進(jìn)行操作,執(zhí)行模塊輸出主要分為如下部分:
(1)轉(zhuǎn)向系統(tǒng),通過在方向盤的車輪間增加主動控制電機(jī),實(shí)現(xiàn)對轉(zhuǎn)向系統(tǒng)的主動控制。
(2)驅(qū)動系統(tǒng),發(fā)動機(jī)控制油門踏板角度,根據(jù)角度變化對應(yīng)節(jié)氣門開度大小來實(shí)現(xiàn)驅(qū)動控制。
(3)制動系統(tǒng),制動壓力分配到制動輪缸實(shí)現(xiàn)對車產(chǎn)生穩(wěn)定的制動力。
(4)車輛縱/橫向控制,根據(jù)車輛行駛軌跡,實(shí)時調(diào)整車輛側(cè)向運(yùn)動,保證車輛跟隨目標(biāo)軌跡。
感知得到的信息傳輸給行駛決策系統(tǒng)處理,決策系統(tǒng)處理后得到的操作方式輸入給運(yùn)動規(guī)劃模塊執(zhí)行,行為決策系統(tǒng)的功能主要包括預(yù)測算法、車行為規(guī)劃與動作規(guī)劃等。執(zhí)行模塊根據(jù)決策輸出保證車輛的安全和合理的行駛。
2.3 系統(tǒng)分類
在無人車行為決策系統(tǒng)研究中可以概括為兩大類:
一類是規(guī)則的行為決策,即對車輛行駛的所有情況進(jìn)行匯集和區(qū)分,不斷完善構(gòu)建無人駕駛車的行為數(shù)據(jù)庫,行為數(shù)據(jù)庫影響因素包含交通法規(guī)、行駛規(guī)則、經(jīng)驗、知識等,根據(jù)這些信息作為判斷條件在什么行駛環(huán)境下對應(yīng)什么車輛狀態(tài),并按照設(shè)計準(zhǔn)則的行駛行為去執(zhí)行。其代表方法為有限狀機(jī)法[6-7]。
另一類是學(xué)習(xí)算法的行為決策,將駕駛行為和對應(yīng)駕駛場景作為樣本不斷進(jìn)行自主學(xué)習(xí),并且在原有基礎(chǔ)上增添新數(shù)據(jù),逐步完善行為規(guī)則庫,由于不同的“人-車-路”的場景樣本信息,所以要運(yùn)用合理的學(xué)習(xí)方法來獲得對應(yīng)場景合理的決策行為,以深度學(xué)習(xí)的相關(guān)方法及決策樹等各類機(jī)器學(xué)習(xí)方法為代表[8]。本文基于規(guī)則的行為決策方法對無人車行駛到路口的情況下,設(shè)計出合理、安全性的行駛方式。
2.4 系統(tǒng)架構(gòu)
通過對上述的介紹,對智能網(wǎng)聯(lián)車有一定的認(rèn)識,整體系統(tǒng)架構(gòu)分為感知模塊系統(tǒng)、決策模塊系統(tǒng)、執(zhí)行系統(tǒng),系統(tǒng)自上而下通過以太網(wǎng)對數(shù)據(jù)進(jìn)行傳輸,保證數(shù)據(jù)的實(shí)時性和完整性。
環(huán)境感知模塊通過相機(jī)、雷達(dá)等車載傳感器;GPS、數(shù)據(jù)地圖和車用無線通信技術(shù)(Vehicle to X,V2X)(車的通訊對象車對車;車對路、車對人以及車對基礎(chǔ)設(shè)施)獲取相關(guān)環(huán)境信息,對于交通場景的模型構(gòu)建為下層模塊導(dǎo)入信息。
行為決策模塊通過上層感知模塊的信息運(yùn)用人工勢場法獲取全局最優(yōu)行駛路線,得到明確的駕駛路線;再依據(jù)道路和交通法規(guī)等環(huán)境信息運(yùn)用決策樹(機(jī)器學(xué)習(xí)方法)算法決策出合理駕駛行為;并將決策信息輸入給運(yùn)動規(guī)劃系統(tǒng)對車輛縱/橫向運(yùn)動控制。
控制執(zhí)行系統(tǒng)接收決策系統(tǒng)具體規(guī)劃信息,控制車輛達(dá)到想要的速度和行駛路徑,并且根據(jù)V2X技術(shù)實(shí)時檢測反饋給決策層進(jìn)行準(zhǔn)確修正,如圖2所示。
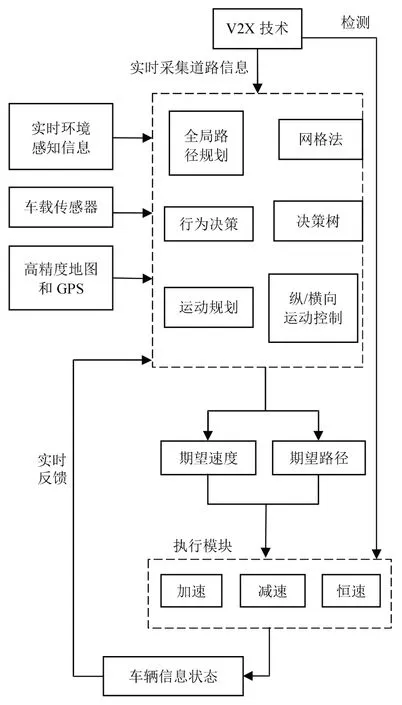
圖2 系統(tǒng)結(jié)構(gòu)圖
3 無人車行駛狀態(tài)
駕駛行為決策是建立行駛的交通環(huán)境的關(guān)鍵,當(dāng)無人車行駛在不同的交通場景下,所對應(yīng)執(zhí)行的駕駛行為也各不相同。當(dāng)智能網(wǎng)聯(lián)車行駛到十字路口下,在不同行駛路線下行駛狀態(tài)也不相同。行駛環(huán)境可以分為鄉(xiāng)村環(huán)境和城區(qū)環(huán)境,鄉(xiāng)村環(huán)境分為路上駕駛場景和路口駕駛場景;城區(qū)環(huán)境分為路上駕駛場景、路口駕駛場景、預(yù)路U駕駛場景和區(qū)域駕駛場景[9](在這里我們主要討論路上和路口下的行為決策),圖3是路口駕駛示意圖。

圖3 路口駕駛示意圖
如圖 4所示,在無人車從路上行駛通過路口的過程中,行駛場景的狀態(tài)轉(zhuǎn)換條件如下:
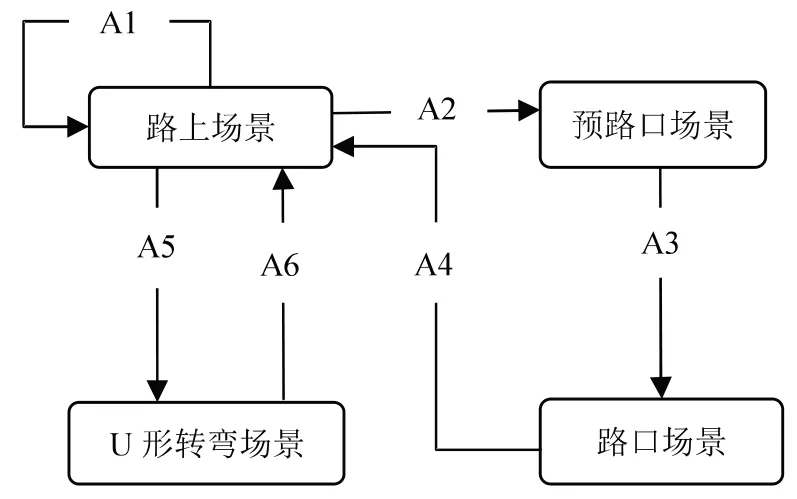
圖4 路口場景轉(zhuǎn)換示意圖
A1:車輛與下一個路口入口點(diǎn)的垂直距離大于50 m;
A2:車輛距離下一個路口入口點(diǎn)垂直距離大于0 m小于50 m;
A3:車輛距離路口停車線垂直距離小于0 m;
A4:車輛駛出路口方向,車輛距離路口停車線垂直距離大于3 m;
A5:下一行駛場景為U形轉(zhuǎn)彎時,基于車輛運(yùn)動方向,車輛與U形轉(zhuǎn)彎入口點(diǎn)距離小于5 m;
A6:車輛駛出路口方向,車輛距離U形轉(zhuǎn)彎出口點(diǎn)垂直距離大于3 m且車頭航向與下一段道路方向夾角小于10°。
無人車行駛中要按照《中華人民共和國道路交通安全法》要求在交叉路口中正確行駛。具體行駛路口規(guī)則有:(1)有交通標(biāo)志、標(biāo)線控制的,讓優(yōu)先通行的一方先行;(2)沒有交通標(biāo)志、標(biāo)線控制的,進(jìn)入路口前停車瞭望,讓右方道路的來車先行;(3)無停止線路口,機(jī)動車停在路口以外等路口交通規(guī)則可查閱相關(guān)資料等[10]。
智能網(wǎng)聯(lián)車輸出的行為決策包括選擇哪個行駛路線,要不要調(diào)頭,要不要變道,要不要停車等行為[11]。根據(jù)汽車在結(jié)構(gòu)化道路上行駛的行為,將智能汽車可采取的行為分為,車道保持、左換道、右換道、交叉路口直行、交叉路口左轉(zhuǎn)、交叉路口右轉(zhuǎn)、調(diào)頭。汽車將要駛往的路段或車道發(fā)生變換的行為,具有兩個階段分別為準(zhǔn)備階段和執(zhí)行階段。
根據(jù)以上行駛行為保證在行駛的過程中安全通過路口的駕駛行為。對于速度變化、防避撞、緊急制動等參數(shù)和行為作為配合行駛策略執(zhí)行的車輛動作。
4 行為決策
4.1 換道決策規(guī)劃
在無人車從路上行駛到路口,再到行駛出路口的這段行駛過程可以劃分為 3個模塊:簡單換道、避障換道和彎道換道。將傳感器獲得信息參考用戶意圖輸入到行駛決策中執(zhí)行在當(dāng)前環(huán)境下想要的換道行為[12],如圖5所示。
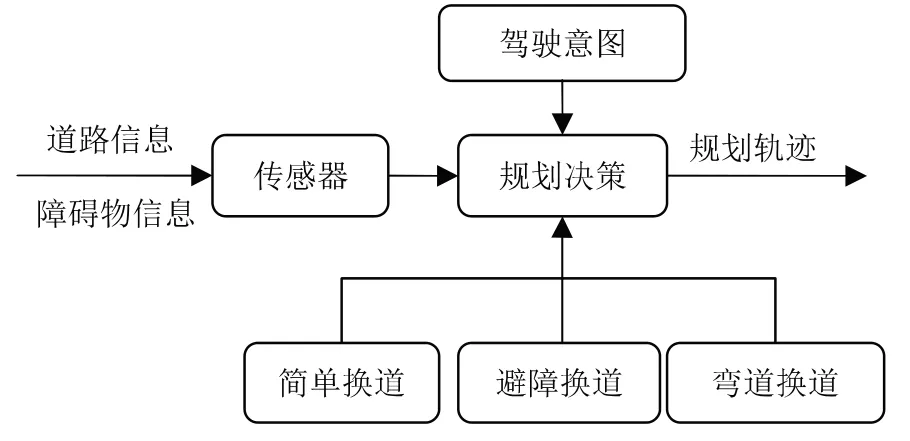
圖5 換道規(guī)劃模塊
在整個行駛的換道過程中,其換道決策的行駛流程圖如圖6所示。

圖6 換道行駛流程
4.2 轉(zhuǎn)彎決策規(guī)劃
當(dāng)無人車進(jìn)入路口時,根據(jù)規(guī)劃路線和紅綠燈信號條件以及判斷路口是否有突發(fā)情況來決定加速(減速)行駛通過路口還是在路口等待,如圖7所示。
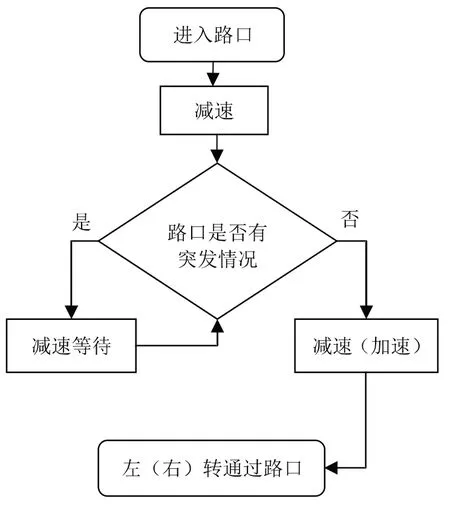
圖7 轉(zhuǎn)彎行駛流程
4.3 調(diào)頭決策規(guī)劃
當(dāng)汽車通過傳感器感知得到路口沒有禁止調(diào)頭或?qū)iT指出可以掉頭,禁止左轉(zhuǎn)的不能調(diào)頭時,要設(shè)置合理的行為決策[13],如圖8和表1所示。
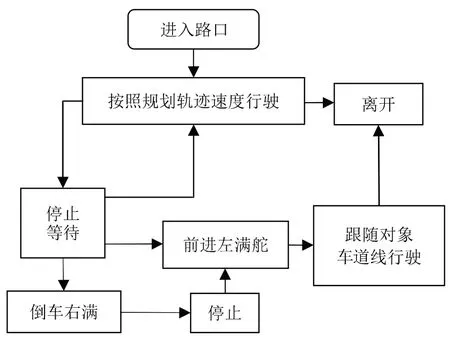
圖8 調(diào)頭行駛流程

表1 調(diào)頭工況狀態(tài)
5 總結(jié)
本文以智能網(wǎng)聯(lián)車為研究對象,針對車輛行駛在十字路口時的行駛決策策略研究,本文首先對智能網(wǎng)聯(lián)車的發(fā)展和背景進(jìn)行簡單介紹,并且對智能網(wǎng)聯(lián)車的無人駕駛?cè)齻€模塊感知、規(guī)劃、執(zhí)行分別詳細(xì)說明便于對智能網(wǎng)聯(lián)車整體系統(tǒng)架構(gòu)的理解。最后對無人駕駛在路口直行、轉(zhuǎn)彎、調(diào)頭、換道、停車等駕駛行為進(jìn)行討論,通過對人-車-路的駕駛環(huán)境因素掌握,對該信息分析處理并設(shè)置相對應(yīng)的駕駛模式,保證智能網(wǎng)聯(lián)車在各種行駛狀態(tài)下的安全、合理性行駛通過。
在未來智能化和網(wǎng)聯(lián)化的飛速發(fā)展,結(jié)合各種技術(shù)使無人駕駛對復(fù)雜交通環(huán)境的感知更加準(zhǔn)確,讓無人駕駛在交通路口下的行駛更快速、合理、安全。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
