國際主流多源融合降水實況產品的研究進展與展望
2023-01-30 10:17:08張璐潘旸谷軍霞師春香
張璐 潘旸 谷軍霞 師春香
(國家氣象信息中心數據研究室,北京 100081)
0 引言
降水是氣候系統中水分循環和能量交換的重要組成部分,是表征氣候變化的重要指標,作為陸地表面的重要物理量,其時空分布和變化對于水文循環、地氣相互作用以及防災減災具有重要作用。另一方面,在運用數值模式模擬和預測天氣及氣候系統變化時,也需要高質量的降水觀測產品來進行對比檢驗。因此,準確的降水時空分布信息對于了解氣候系統和長期的天氣氣候變化,以及陸表、水文過程的模擬和預報至關重要。
目前降水數據源主要包括站點觀測、衛星遙感、雷達估算降水和數值模式模擬(或預報)。這幾種數據各有優劣。站點觀測數據通過雨量計獲取數據,能夠較為準確地測量當前時刻地面的降水量,但空間代表性差;由于受儀器故障、運行性能下降、雜物堵塞雨量筒等因素影響,實際的地面觀測降水數據包含隨機偏差和系統性偏差。雷達估算降水具有較高的時空分辨率,但雷達回波中的雜波和噪聲會對估算結果造成較大影響,數據精確度不如地面雨量計觀測[1]。這兩種降水資料空間分布不均勻,適合觀測局地區域性降水,很難獲得較準確的大區域或全球的降水信息。衛星反演降水資料空間覆蓋廣,對某些特定目標區域的觀測時間分辨率也很高,但由于衛星反演降水的物理原理和算法的局限性,其反演降水的精度相對降低。數值模式模擬(或預報)的降水數據是根據天氣系統變化、微物理過程演變和地形條件作用等信息,綜合得出的降水數據,通常包含地形信息且數據分布規則,然而由于模式動力框架、物理過程還不能完全描述大氣的真實狀態,模式本身亦存在嚴重的系統偏差,使得模擬(或預報)降水區域與實際地面觀測常常存在一定程度的差異。因此,基于單一來源的降水資料各有優劣,有效利用不同來源降水的優勢,將多源降水進行融合是獲取高質量高分辨率網格降水產品的趨勢。
“天氣實況”是天氣預報的起點。“網格天氣實況”則要求多圈層多要素整體協調一致,還得對復雜地形和高影響天氣中個別的極值負值進行合理化處理,為預報與服務提供“零時刻”數據支撐。多源降水實況產品的研制對于實時掌握天氣形勢、及時佐證降水預報具有重要意義。
從20世紀90年代起,美國、日本、歐盟等先后開始研制降水融合實況產品。美國國家海洋大氣管理局(NOAA)、美國國家氣象局(NWS)和氣候預測中心(CPC)的CMAP產品覆蓋全球,分別有月和候兩種時間分辨率,CMORPH產品只覆蓋60°N—60°S的地區,原始數據時間分辨率為30 min。2019年美國NASA推出了覆蓋全球范圍、時間分辨率為30 min、空間分辨率為0.1°的衛星反演降水產品IMERG V06[2]。相比于其他系列降水產品,在大幅度提高時空分辨率的基礎上,仍具有較好的數據質量,成為衛星反演降水產品的主流產品之一。日本研制的GSMaP產品盡管只覆蓋60°N—60°S區域,但是該產品在研制過程中合理考慮了地形作用對降水的影響,因此也具有較好的產品質量。
NOAA國家強風暴實驗室(NSSL)和NWS水文發展辦公室(Office of Hydrologic Development)針對高質量、高分辨率降水產品的需求,聯合發展了NMQ計劃(The National Mosaic and Multisensor QPE Project),發展了一系列針對雷達和衛星估測降水的誤差訂正[3]和針對單部雷達特性的局地誤差訂正方案[4]以及雷達、衛星與地面觀測資料的融合技術[5-6],并實時推出了各種高分辨率定量降水估測(QPE)產品,其中美國最新業務化的MRMS系統研制的雷達QPE產品Q3是區域高分辨率QPE產品中比較有代表性的降水產品。1 km的空間分辨率和2 min的時間分辨率使得Q3相比于StageⅡ和Stage Ⅳ有了較大提升,尤其在主要技術中新增了無縫混合掃描等關鍵技術,進一步提高了QPE的質量。
近年來國外降水融合技術逐步改進,不斷推出時空分辨率更高、質量更好的多源降水融合產品。發展高分辨率的降水融合產品,是解決氣象及水文業務和科研迫切需求的有效途徑,因而越來越受到氣象資料基礎研究領域的關注和重視。我國對于多源降水融合技術的研究起步較晚,自2010年起逐步開展此項研究,旨在建成中國區域多源降水融合實況系統,研制中國區域高時空分辨率多源降水融合產品及全球多源降水融合產品。最初引進NOAA和CPC的“概率密度函數(PDF)+最優插值(OI)”兩步融合法[7]研制了中國區域逐小時、0.1°的地面和基于GSMaP和IMERG衛星反演降水的二源融合降水產品[8-10]。2014年引入雷達降水高分辨率的空間結構信息,采用貝葉斯模式平均(BMA)方法,在中國區域成功研制出逐時、5 km的地面衛星、雷達三源融合降水產品,2016年進一步將產品空間分辨率提高至1 km[8,11]。2018年國家氣象信息中心牽頭,中國區域逐時、5 km分辨率的地面衛星、雷達三源融合降水實況產品實現業務運行,作為零時刻實況應用于我國無縫隙智能網格預報業務,2021年該產品空間分辨率將提高至1 km。三源融合產品雖然一定程度上滿足了用戶對產品質量、時效和高分辨率的需求,但是仍然存在需要解決的問題和未能滿足的需求。首先,在衛星反演降水產品領域,我國還未推出自己研制的全球產品,目前仍依賴于國外產品,對于如何進行紅外和微波反演技術研究和開展衛星反演降水產品研究,需要廣泛調研,制定計劃。其次,我國還沒有時間上均一的長序列、全國組網的雷達QPE歷史產品用于雷達QPE產品的偏差訂正;并且對于雷達QPE的質量控制方法還不夠詳細和嚴謹。考慮到我國存在大量S波段雷達和C波段雷達,二者在雨區衰減方式不同,造成二者疊加區域組網也有一定的技術難度。雷達QPE產品還存在雷達放射狀波束結構,以及不同雷達的系統偏差拼接后造成降水空間結構不連續等質量問題。最后,青藏高原地區的特殊地形也為降水融合帶來了較大困難。山區降水如何根據地形合理融合也是亟需解決的問題。
針對我國降水融合領域的發展現狀和問題,對國際主流降水融合產品展開調研,以美國的IMERG、MRMS的Q3和日本的GSMaP為例,重點調研這幾種產品的研制算法、產品優勢和不足之處,及時掌握國際降水融合產品研究動態,為進一步完善我國降水融合產品奠定基礎。
1 降水融合的發展現狀
1.1 國際主流全球降水實況產品研究進展
靜止衛星與極軌衛星運行方式的差異決定了二者的探測重點不同。靜止衛星能夠長時間、連續且高時空分辨率地探測大氣,利用它探測的紅外/可見光(IR/VIS)云頂亮溫與降水概率和降水強度統計關系來反演降水,適用于對流性降水為主的區域。極軌衛星探測的是大氣中降水例子發射或者散射的微波,由被動微波(PMW)反演降水精度顯著提高。靜止衛星與極軌衛星觀測難以實現時空全覆蓋,因此結合紅外和微波探測的優勢發展集成衛星反演降水是研制全球衛星反演降水產品的主流思路。國際現有主流的衛星反演降水融合產品如表1所示。這類降水產品雖然大多覆蓋全球,但多以逐月(候)為主,空間分辨率也較粗,但資料時間覆蓋從1979年至今,一定程度上滿足了降水季節性、年際和年代際變化等氣候方面的研究和應用。其中美國的IMERG產品和日本的GSMaP產品相比之下具有較高的時間和空間分辨率,下面將針對這兩種產品做進一步調研介紹。
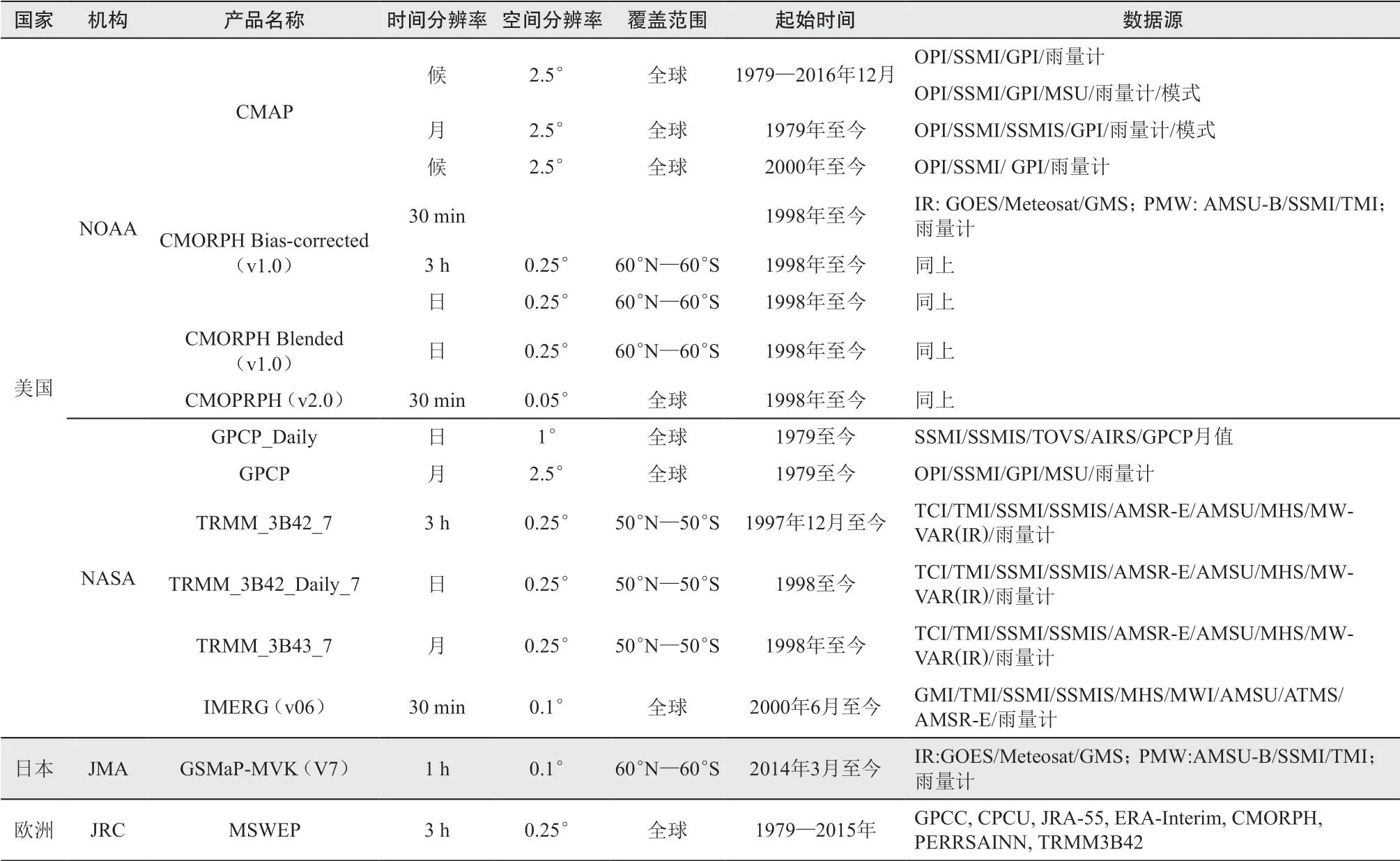
表1 國際主要降水業務產品 Table 1 List of global merged precipitation products
1.1.1 美國 IMERG V06降水產品
Integrated Multi-Satellite Retrievals for GPM (IMERG)是美國NNASA推出的網格化GPM(Global Precipitation Measurement)降水產品,它結合了多個星載傳感器的觀測結果,為全球提供逐小時0.1°分辨率的降水估計值。IMERAG的本質是使用GPM核心天文臺上的傳感器作為參考標準去校準GPM的衛星傳感器,通過單一的反演框架來估計觀測到的降水,然后將它們用先進的技術融合成一個覆蓋全球的網格數據。IMERG V06從數值模型中的總可降水水汽(或總柱狀水汽)中導出運動矢量以傳播降水像素,解決之前基于紅外(IR)方法的局限性,并將該方案擴展到極地。
IMERG V06版本提供了全球0.1°的降水估計,過去的版本覆蓋范圍只有60°N—60°S。IMERG有Early、Late和Final三個版本以適應不同用戶對數據延遲和準確行的要求。Early版本延遲4 h提供,適用于實時應用程序,例如預測山洪暴發。延遲時間為12 h的Late版本可用于水資源管理等目的。Final版本的延遲為3.5個月,適用于研究應用程序。
1.1.1.1 IMERG算法簡述
IMERG的框圖如圖1所示。從各個衛星PMW傳感器計算的輸入降水估值是組合在一起的,大部分作為1級亮度溫度從相關供應商接收到降水處理系統(Precipitation Processing System,PPS),轉換為GPM 1C級校準亮度溫度,然后使用GPROF 2017(目前)轉換為2級降水估值。所有估計值都被網格化后,使用概率匹配在45天滾動的基礎上與CORRA產品相互校準,并在高緯度海洋(其中CORRA V06降水不足)和整個陸地上使用簡單的比率對GPCP月估計值進行氣候學校準。這些高質量數據被合并成逐半小時,并提供給CPC變形卡爾曼濾波器準拉格朗日時間插值方案和利用人工神經網絡—云分類系統重新校準方案。同時,CPC經過天頂角校正、相互校準的合并地理紅外場,并將其轉發至PPS,用于PERSIANN-CCS計算例程(詳見[12])。

圖1 IMERG 中主要處理模塊和數據流的高級框圖 Fig. 1 High-level block diagram illustrating the major processing modules and data flow
IMERG使用的降水值是由被動微波(PMW)傳感器估算的。PMW對降水的估算是通過Goddard剖面算法(GPROF),這是一種完全參數化的反演算法,該算法使用貝葉斯方法,以地表類型、地表溫度和總降水量為條件,根據PMW亮溫估計地表降水率。PMW估計值每半小時轉化為0.1°網格值。如果一個網格框內有兩個以上的估計值,則根據以下優先級只選擇一個:選擇錐形掃描傳感器的估計值而非交叉掃描傳感器的估計值,其次是估計值的觀測時間最接近半小時的中心時刻。之后,對格點化的PMW估計值進行相互訂正。IMERG使用Ku波段聯合雷達和輻射計(CORRA)產品作為校準的參考標準,對全球降水氣候項目V2.3產品[12,13]進行季節性調整,以控制陸地和海洋某些緯度上已知的不足之處。理想情況下,所有傳感器都將直接校準到CORRA,但由于軌道特性和Ku波段CORRA估計值的范圍較窄,對于搭檔傳感器來說,重合采樣太少了。因此,相互校準分兩步進行。首先,網格化搭檔傳感器的平均值分別根據GPM和TRMM時期的GPM微波成像儀(GMI)和TRMM微波成像儀(TMI),使用基于一年重合估計的靜態季節性數據進行校準。其次,使用每5 d更新一次的45 d動態校準,將GMI-TMI校準到CORRA,該校準也適用于GMI-TMI校準的搭檔傳感器。
準拉格朗日插值應用于網格PMW估計,用以填補輔助數據計算的運動矢量中的空白。此過程稱為變形,最初是作為CPC變形技術(CMORPH)的核心組成部分被引入的[14-15]。利用人工神經網絡-云簇系統(PERSIANN-CCS)算法計算紅外亮溫,并以此計算微波校準的降水估計值,再根據[16]的卡爾曼濾波方法進一步補充變形降水。通常情況下,在凍結的表面上,PMW的反演是不準確的,所以IMERG掩蓋了PMW和雪、冰覆蓋表面的變形估計,正如NOAA AutoSnow產品所示[17]。
1.1.1.2 IMERG算法變形
IMERG算法的一個關鍵組成部分是變形技術。首先由NOAA氣候預測中心開發,作為CMORPH產品的核心部分,后來根據全球衛星降水制圖改進卡爾曼濾波(GSMaP)[18],包括IR降水[16],最后將變形算法集成在IMERG算法中。全球降水的先進算法迅速采用這一概念,證明了它能夠從有限的PMW傳感器采樣中在網格數據集中產生高時間分辨率的產品。
在CMORPH和IMERG中實現的變形算法可以分解為三個部分。首先,推導出代表降水運動的運動向量。其次,這些運動向量用于在沒有瞬時PMW觀察的區域上傳播降水。最后,通過卡爾曼濾波器將傳播降水與紅外降水集成。
為了得到運動矢量,比較了全球范圍的大氣變量的兩個連續場。在V06之前的CMORPH和IMERG中,所使用的變量是來自CPC 4 km融合的紅外數據集的半小時全球地球同步紅外亮溫。為了計算網格框處的運動矢量,將5°×5°模板中低于260 K的IR像素與接下來半小時的IR像素進行比較,這些像素與模板具有不同的空間偏移。對每個空間偏移量計算紅外像素的兩個場之間的相關性,相關性最高的偏移量構成該網格框的運動矢量。這種方法得到的運動矢量反映了云頂的大尺度運動,與實際的亮溫值相對獨立。雖然運動矢量可以在每個降水網格處導出(對于IMERG來說是0.1°),但由于此過程計算量很大,實際上每2.5°計算一次。由于數據丟失或模板中缺少冷云而導致的任何缺失向量都使用時間和空間插值來填充。如果將多個像素傳播到單個網格框,則對它們進行平均。如果傳播后網格框為空,則使用來自相鄰網格框的空間插值來填充它。
在CMORPH和IMERG中,從V05開始,運動矢量是根據4 km地球同步紅外亮度溫度計算的;因此,運動矢量反映了云頂運動。然而,使用地球同步IR計算運動矢量有兩個主要限制。第一個是云頂運動可能與降水運動不匹配,主要是由于風切變以及降水和云系統演化的潛在差異。事實上,這就是使用美國地基雷達進行氣候定標的原因(如上所述),盡管尚不清楚這些定標因子對世界其他地區的適用程度。第二個是CPC紅外數據集僅限于60°N—60°S。60°N/S向極地方向,視角被認為過于傾斜,無法產生可靠有用的信息。這個限制阻止了變形直接擴展到高緯度(此處定義為60°N/S向極地地區)。針對地球同步紅外數據的這些缺點,改進了IMERG V06,使用數值模型變量導出運動矢量。
1.1.1.3 IMERG的未來發展
針對IMERG V06產品中陸地—海岸—海洋連續性降水探測的不確定性,Derin等人[19]選取美國的三個沿海地區——西海岸、墨西哥灣和東海岸,已經進行了初步評估,所有這些地區都具有不同的地形和降水氣候特征。在不同的表面(陸地、海岸和海洋)進行檢測能力的對比。結果表明,PMW算法檢測性能最好(命中率在25%~39%),其次是變形(20%~34%)。對于地形難以檢測的西海岸,降水形成機制起著重要作用。IMERG V06產品依舊有需要不斷完善的地方。
對于IMERG V06,目前選擇總可降水量(TQV)作為推導運動向量的變量,因為它具有競爭力的性能和全局完整性,盡管隨著更多評估結果的到來,可能會在未來版本中重新考慮這一決定。
關于運動矢量源對TQV的變化,一個值得關注的問題可能是地形的負面影響。TQV作為一個垂直積分量,由于垂直柱較短,在較高海拔處TQV減小。考慮到運動矢量推導的間接性質和降水運動與地形之間復雜的相互作用,這如何影響運動矢量的精度尚不清楚。事實上,也不清楚基于紅外的運動矢量是如何受到地形的影響的。值得指出的是,IMERG不同于GSMaP[20-21],還沒有一個方案來解釋地形對降水的增強,這使得更難理清地形對運動矢量可能的影響,同時也限制了評估方法的有效性。
與將IMERG擴展到極地有關的第二個問題是使用圓柱等距網格,在經度方向60°N/S的限制下,以前可以接受的網格扭曲現在在極點附近相當嚴重。雖然已經在V06中實施了更正,但它們的特殊性質可能會在高緯度的傳播估計中引入誤差。IMERG正在積極考慮為V07遷移到一個更公平的網格,轉換到考慮經度失真的網格將提供更高的精度(特別是在高緯度地區)和計算速度。
1.1.2 日本GSMaP降水產品
2002年在日本科學技術振興機構的贊助下啟動了一個新的“全球衛星降水制圖(GSMaP)”項目,以開發基于可靠的降水物理模型的降雨率反演算法,并根據衛星數據生成高精度、高分辨率的全球降水圖,為研究全球降雨率變化和長期水資源管理提供基礎信息。
GPM時代的GSMaP產品主要由“標準產品”“近實時產品”“實時產品”和“再分析產品”組成。這些產品的延遲時間和輸入數據的不同,如表2所示。

表2 GPM時代的GSMaP產品列表 Table 2 List of GSMaP products in the GPM era
1.1.2.1 GSMaP算法
GSMaP算法基于多衛星被動微波輻射計觀測數據,利用來自地球靜止紅外(IR)儀器的信息,以及利用熱帶降雨測量任務(TRMM)上的降水雷達(PR)和閃電成像傳感器(LIS)觀測成果建立的數據庫,生成高分辨率、高頻率的全球降雨圖。GSMaP算法已經根據熱帶降雨測量任務(TRMM)降水雷達(PR)的各種屬性進行了改進,并在1997—2015年運行。PR和TRMM微波成像儀(TMI)的結合使用大大改進了降雨估計技術。GPM核心天文臺于2014年2月發射搭載雙頻降水雷達(DPR)和GPM微波成像儀(GMI)。DPR和GMI通過將觀測范圍擴展到比TRMM獲得的緯度更高的緯度,從而擁有更先進的技術。
GSMaP產品的核心算法主要包括:PMW降水反演算法、PMW-IR組合算法、雨量計觀測調整算法。GSMaP產品的流程如圖2所示。GSMaP算法使用一些輔助數據作為操作輸入。利用6 h、0.5°網格分辨率的JMA全球分析(GANAL)和預測(FCST)數據集作為大氣條件的輔助數據來計算查找表(lookup table,LUTs),供PMW算法參考。
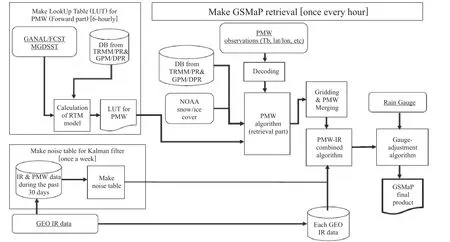
圖2 GSMaP產品流程圖 Fig. 2 Flow chart of GSMaP products
采用GANAL數據處理標準產品,采用FCST數據處理近實時產品。在再分析產品中,使用JRA-55數據(6 h,TL319L60模型網格)代替運行數據。利用JMA融合的衛星和全球每日海表溫度(MGDSST)的觀測數據(位于0.25°網格)作為輔助海表溫度數據,供PMW算法參考。NOAA CPC在0.5°網格上,統一的基于雨量計的全球每日降水分析,已被用作計算雨量計調整降雨量的輸入。來自JAXA高級微波掃描輻射計(AMSR-E)產品的氣象海冰值用于篩選V6中的海冰,而沒有使用地表雪的輔助數據。在V7中,使用NOAA國家環境衛星、數據和信息服務(NESDIS)多傳感器雪/冰覆蓋圖作為輔助數據來檢測海冰和表面雪,這些數據供PMW算法使用。
1.1.2.2 PMW算法
PMW算法從PMW傳感器亮度溫度(Tbs)中反演全球降水率。PMW算法的基本思想是找到提供Tb的降水率,通過輻射傳輸模型計算最契合觀測的Tbs。
PMW算法由前向計算部分和反演部分組成。在前向計算部分,通過將GANAL或FCST數據的大氣和地表變量以及基于星載降水雷達觀測的降水物理模型納入Liu[22]的RTM程序,計算均勻降水的LUT。PMW算法的反演部分利用陸地上的散射信號和海洋上的放射信號來檢測降雨。采用Seto等[23],Mega和Shige[24]及Kida等[25]等方法對陸地、沿海和海洋地區的降雨進行檢測。此外,通過考慮從37 GHz Tbs估計云液態水[26],V7提高了對海洋的探測能力。
1.1.2.3 地形/非地形降雨的分類
在沿海山脈地區,強降雨可能是由淺層地形降雨引起的,這與PMW算法中的假設不一致,即強降雨是由帶有大量冰的深云產生的。因此,開發了地形/非地形降雨分類方案[27]。地形降雨的LUT是根據Shige等人[28]的方法計算的。此外,還開發了一種適用于地形降雨LUTs的地形降雨探測方案。
1.1.2.4 降雪估算方法
在V6或更早的版本中,GSMaP產品中沒有降雪估算。降雪估算方法可分為對降水相態(雨/雪)進行分類的方法和如果確定為雪則估算降雪強度的方法。這里,雨/雪分類方法基于Sims和Liu[29]的方法。該方法根據過去地面觀測的結果,確定降水相態是雨還是雪。基于Liu和Seo[30]的方法,采用CloudSat-GPM重合數據集開發降雪強度估計方法。
1.1.2.5 PMW-IR組合算法
PMW-IR組合算法將PMW數據與紅外輻射計數據相結合,以實現高時間(1 h)和空間(0.1°)分辨率的全球降水估算。該產品是基于卡爾曼濾波器模型生成的,該模型基于兩幅連續紅外圖像導出的大氣運動矢量來細化降水速率傳播[18]。使用過去30 d的IR和PMW 數據,每周計算一次卡爾曼濾波器模型中的噪聲和系數(圖2)。
1.1.2.6 雨量計修正算法
GA算法通過NOAA/CPC統一的全球日降水量分析來調整MVK估計值。估計值僅在陸地上進行了調整。GA和GA_NRT的海洋降雨率分別與MVK和NRT的相同。該算法使用光學估計方案,其中通過最大化系統模型中定義的概率密度函數來求解[31]。GA的每小時降雨率通過該算法進行調整,使得GA的24 h降雨率總和與雨量計觀測值大致相同。
1.2 區域高分辨率降水實況產品研究進展
雷達通過接收其發射電磁波經過降水區降水粒子反射回來的雷達回波信號來進行定量降水估測(QPE)。在區域高分辨率降水檢測領域雷達定量降水估測產品仍是主流(表3)。雷達探測的是與降水直接的結構信息,精度較衛星明顯要高。從雷達QPE業務產品的時空屬性來看,其分辨率已達到1 km、分鐘級,空間覆蓋一般為局地組網。由于Z-R關系不確定、地物遮擋、距離衰減、探測高度等原因造成雷達估測降水存在明顯的系統性偏差,需要利用地面雨量計資料對其進行校準。以雨量計為基準發展了基于卡爾曼濾波、最優插值、距離反比加權(IDW)等方法的平均場系統誤差訂正和局部偏差訂正技術[4],已在NCEP的Stage Ⅳ系統和美國國家強風暴實驗室(NSSL)的多雷達多遙感(MRMS,Multi-Radar/Multi-Sensor System)分析系統中成熟應用。MRMS系統也是目前發展最為成熟和應用最廣泛的業務化系統。

表3 國際主要高分辨率降水業務產品 Table 3 List of main high-resolution operational products of precipitation in foreign countries
Q3是美國最新業務化的MRMS系統研制的雷達QPE產品。MRMS系統中雷達QPE產品制作的輸入數據包括:約180部雷達基數據,RAP模式數據、約10000站HADS地面雨量計數據、PRISM氣候背景場數據等。輸出降水產品包括:基于雷達QPE(Q3RAD)產品、基于雨量計QPE(Q3Gauge)產品、雨量計偏差訂正后雷達QPE(Q3GC)產品、雨量計和降水氣候場融合山區降水(Q3MM)產品等4類。
1.2.1 Q3產品中的關鍵技術
1)無縫混合掃描反射率生成技術
無縫混合掃描反射率(Seamless HSR,SHSR)是根據地形對雷達對雷達波束的阻擋選擇最低有效仰角而生成的,并進行了無縫處理,以解決高空間分辨率下的波束縫隙問題,同時進行了雷達反射率因子質量控制去除非氣象回波,并利用波速阻擋補償、垂直廓線訂正方法提高回波的均一性。
2)降水類型分類技術
MRMS系統中,利用來自模式的環境變量(地表溫度、濕球溫度、結冰層的高度)、強天氣產品(?10 ℃的反射率、VIL、冰雹最大期望尺寸)、無縫混合掃描反射率、AVPR、暖雨概率等多源數據,基于決策樹方法將降水分為無雨、雪、雹、暖雨、冷雨、對流性雨等。
3)降水率估測技術及Q3RAD產品
天氣雷達間接測量降水率,需由Z-R經驗公式將反射率因子(Z)反演為降水率(R)。不同類型降水粒子相態、大小不同,對雷達波散射能力不同,所以應采用不同Z-R關系式。MRMS系統中根據降水類型場,采用相應Z-R關系計算瞬時降水率[32]。
4)雙偏振量的降水估測
關系在某些區域呈現出降水估測的優勢[32],但關系對雷達標定的偏差比較敏感;和R對雷達標定偏差及由于波速阻擋造成的偏差不敏感,但對于不同降水類型的估測性能不穩定。因此,MRMS系統計劃在業務系統中集成多種雙偏振雷達QPE算法。
5)局地雨量計訂正技術及Q3GC產品
由于Z-R經驗公式的準確性、雷達掃描與地面降水的差別等問題,使得雷達QPE產品與地面觀測降水之間存在偏差,一般使用地面雨量計進行訂正。MRMS系統利用質控后HADS雨量計小時降水量訂正Q3RAD產品。將CONUS分成多個子區域,每個子區域利用IDW方法進行雨量計訂正,參數通過交叉檢驗方法選擇。之后,將各子區域訂正后的雷達QPE合并,得到局部偏差訂正的Q3GC產品。
6)山區降水產品生成技術及Q3MM產品
山區的地形遮擋影響了雷達QPE產品質量。為解決這一問題,MRMS提出Mountain Mapper方法[33]。利用質控后的站點雨量計小時降水量和氣候降水背景月值數據生成西部山區QPE產品,稱為Q3MM產品。
7)雨量計插值降水產品生成技術及Q3Gauge產品
小時雨量計插值降水產品(Q3Gauge)使用質控后的HADS雨量站數據,利用IDW插值方法而生成。
1.2.2 MRMS的未來發展
NSSL的工作人員在第100屆AMS年會上介紹了關于MRMS系統正在進行的研究和工作,主要包括以下幾個方面:
1)基于雷達的降雪定量降水估算(QPE)由于雪晶類型、密度和降雪速度等因素的影響而變得復雜。研究表明,與傳統的Z-S關系相比,利用雙偏振變量和反射率可以提供更準確的雪QPE估計。采用關系計算積雪的QPE性能,通過準垂直剖面(QVP)分析,研究環境參數對關系的影響,并對此關系進行了修正。
2)提出了一種結合比衰減(A)、反射率(Z)和比差相位(KDP)的多雷達多傳感器(MRMS)雙極化(Q3DP)定量降水估計(QPE)算法。Q3DP QPE在雷達觀測低于熔化層的區域使用R(A)關系。與其他雷達變量相比,A與R的線性關系更密切,對系統誤差Z和ZDR(差分反射率)不敏感。因此,與其他雷達變量相比,R(A)提供的QPE具有較少的系統和隨機誤差,特別是在電磁能存在大量衰減的中雨或大雨中。所以,Q3DP的性能明顯優于當前使用多重降水率(R)和Z關系的MRMS QPE。
3)利用一種特定類型的深度學習模型——卷積神經網絡,從天氣雷達觀測數據中定量估算降水量。初步結果顯示,其性能優于傳統的基于物理的雷達QPE 模型,具有高計算效率和低I/O使用率,適用于潛在的操作應用程序。將展示來自不同領域的幾個示例,以展示卷積神經網絡準確有效地估計降水量的能力。
2 降水融合的發展趨勢
2.1 衛星反演降水技術的改進
GPM依靠被動測量和主動測量來測量降水的特性。GPM的雙頻降水雷達(DPR)等主動雷達發送和接收反射回雷達的信號。返回到雷達接收器的信號(稱為雷達反射率)提供了云中多個垂直層雨雪滴的大小和數量的測量。另一方面,像GPM微波成像儀(GMI)這樣的被動降水輻射計從包括雪、雨、云和地球表面在內的完整觀測場景中測量自然熱輻射(稱為亮度溫度)。
整個衛星反演降水過程,用到了許多算法將各種主動、被動探測信號轉換為降水信息。以IMERG為例:1)雷達算法,降水雷達的獨特功能是提供降雨的三維結構,獲得海洋和陸地上高質量的降雨估計數。雷達測量通常對地表不太敏感,在雷達反射率和云中雨雪的物理特性之間提供了一種幾乎直接的關系。由于在太空中操作雷達的復雜性,儀器的信道(頻率)是有限的。TRMM衛星在ku波段有一個單頻雷達,對中雨率特別敏感。在單頻率下,TRMM雷達能夠獲得雨滴粒徑分布(PSD)的一個參數;垂直采樣剖面(例如,云中垂直每500 m)的中值液滴大小或液滴數量。GPM雙頻降水雷達有兩個頻率,一個是像TRMM一樣的Ku波段,另一個是對小雨和降雪量敏感的Ka波段;因此,液滴的大小和分布都可以得到。IMERG中的雷達算法需要假設和矯正來回復降水結構,尤其是校正衰減。衰減是指雷達信號隨著遠離發射器而減弱,并被降水和其他大氣粒子散射、反射和吸收。2)輻射計算法,降水輻射計通過使用多個被動頻率(TRMM為9個,GPM為13個)為解釋云中的雨雪提供了額外的自由度。每個頻率的亮度溫度是測量視野內一切事物的標準。這些頻率從低頻(10 GHz)對液體雨滴很敏感,到中頻(91 GHz)和高頻(183 GHz)對冰雪顆粒很敏感。所以,化繁為簡,當云柱中有液體雨時,低頻通道就會響應;下雪時,高頻頻道會有反應;當空氣清新時,亮度溫度會對表面輻射做出反應。在小雨情況下,地表輻射可能會污染亮溫,因此需要額外的信息來限制降水反演。具體來說,在陸地上,只有較高的頻率對估算降水量有用。3)組合算法,同時使用主動和被動微波傳感器數據提供了關于降水云的宏觀和微觀物理過程的補充信息,可用于減少雷達/輻射計組合反演算法的不確定性。簡單地說,組合算法使用輻射計信號作為雷達看到的衰減的一個約束。綜合反演產生了水文氣象剖面、顆粒大小分布和表面參數,其亮度溫度和反射率與實際衛星測量一致。這些組合產品可以重新包裝,用作多個輻射計的檢索貝葉斯數據庫。4)多衛星算法,除了TRMM和GPM衛星外,許多其他衛星已經并將繼續攜帶與降水有關的傳感器。多衛星算法的目標是利用從這一國際衛星星座計算出的“所有”準全球降水估計數,創造一種高分辨率降水產品,在選定的領域和記錄期間(目前是準全球,2000年至今)具有完全覆蓋范圍。基于微波和組合雷達/輻射計輸入數據的估計具有更高的質量,因為降水和衛星數據之間存在物理上的直接關系。由于紅外和降水之間的間接關系,基于熱紅外傳感器的估計質量較低,但由于傳感器位于地球同步軌道,它們提供了更頻繁的覆蓋范圍。其中一個較高質量的數據集,目前是上述的組合雷達+輻射計算法,被選為標準,然后所有其他降水數據集被校準到該標準。在組合中(目前每半小時在0.1°×0.1°緯度/經度網格上),盡可能多地使用較高質量的數據,而較低質量的數據起次要作用。最后,在它們存在的地方,主要是陸地地區,每月的雨量計數據被用來控制衛星數據集可能表現出的偏差。多衛星算法在觀測時間的幾個小時內運行,然后在接收到包括月表在內的所有數據后再次運行。
這些繁雜的算法抓住了衛星信號與降水之間的主要關系,但是究其細節,仍有很多待完善的地方。正如IMERG V07所計劃的,對于紅外信息中包含的運動矢量和降水運動與地形之間復雜的相互作用還研究得并不透徹,這種相互作用如何影響運動矢量的精度尚不清楚。這對于進一步提高地形降水質量尤為重要。
第1.1.2節中對GSMaP產品算法的詳細敘述中,也闡述了最新一代產品對各種算法的優化。對這些反演技術的不斷優化和改進,可以進一步提高衛星反演降水產品質量。
2.2 雷達QPE技術的改進
地面雷達網絡目前提供最高空間和時間分辨率的QPE,是山洪警報的關鍵輸入。對于QPE質量的提高,需要從以下幾個方面做出進一步改進。
2.2.1 雷達數據質量控制技術完善
雷達數據質量控制(QC)在確保高質量降水融合產品方面發揮著關鍵作用。在天氣研究中,非氣象雷達回波包括生物雜波(即鳥類和昆蟲)、對發射機的電磁干擾(如太陽閃光燈)、地面/海面雜波、異常傳播以及來自箔條或其他非天氣目標的回波,有不同的判別算法可將非降水回波與天氣信息分開,并利用雙偏振雷達數據,基于水凝物和非水凝物返回的相關系數(ρHV)的明顯不同特征,進一步對不同的水凝物進行分類。但是仍有很多細節信息會對QC算法產生影響。針對MRMS中的雷達QC算法,NOAA也提出進一步的改進,包括:1)熔化層劃分;2)清除風電場污染;3)減輕硬件問題造成的損壞數據;4)減輕殘留雜波和太陽峰值;5)減少由旁瓣效應和AP引起的地面、河流、湖泊雜波殘留[34]。也有研究針對雷達QPE本身,展開更嚴格的質量控制,通過更準確的雷達質量指數(RQI),明確哪些QPE質量是不好的,需要進一步訂正的[35]。
Husnoo[36]等則另辟蹊徑,提出將神經網絡算法用于英國天氣雷達質量控制。該算法從最低層可用的掃描數據中選擇數據用以優化兩個其他雷達數據校正算法的組合性能:地面雜波緩解和垂直剖面反射率校正。與目前所使用的QC算法相比,該算法獲得的QPE產品評估顯示了優越的性能。
2.2.2 雙偏振雷達QPE技術改進
對于雙偏振量的研究MRMS一直都在進行中。相比于多普勒雷達(WSR-88D)生產的QPE,雙偏振雷達的QPE(DPR QPE)收到的異常傳播雜波和生物散射的污染更少。DPR QPE基于反射率Z,微分反射率和特定微分相位在一些凍結水平升高的暖季事件中,提供了更好的降水估算(平均偏差較小)。但其對誤差高度敏感,具有相對較大的隨機誤差[37]。DPR QPE在熔化層附近也受到不連續和偏差的影響。使用特定衰減A的DP雷達QPEs對Z和校準誤差的敏感性較低[38-40]。此外,A不受部分光束阻塞的影響[39]。雖然具有類似的有點,但的估計需要沿徑向進行平滑,這會導致空間分辨率的下降。相反,與不同,A在更廣泛的降雨強度范圍內以原始雷達分辨率提供降雨率估計,在小雨中會產生噪音[41]。之前的R(A)研究僅限于單一雷達框架,僅應用于雷達波束低于熔化層(ML)的區域。此外,這些研究主要集中在雷達附近廣泛傳播的大雨。為了使R(A)能夠用于跨越較大的國家雷達網絡的操作環境中,需要另外兩個步驟:1)將R(A)與其他雷QPE技術相結合,并建立一個適用于任何地方的綜合方案,以及2)評估所有雨情的R(A)性能,包括輕度和零星雨情,并確定R(A)和其他雷達QPE關系的最佳組合。
基于此,MRMS進行了廣泛研究開發了一種無縫DP合成QPE。但仍需要進一步的改進:1)在非常小和零星的雨中,衰減信號太弱,R(Z)可能提供比R(A)更好的估計,可能應該用于代替R(A);2)在大范圍的輕層狀雨中,當前默認的α(0.035)可能太低(α是一個通常隨液滴尺寸分布和溫度而變化的參數);3)對于數據樣本為單一地區的混合地區,可能需要對R(A)進行局部調整以獲得更準確的降水估計。
2.2.3 改進地形降水估計
復雜的地形與豐富的水分相互作用會導致復雜的微物理過程,在非常小的空間和時間尺度上產生大量的局部降雨和山洪暴發。山區高分辨率和高精度定量降水估計(QPE)對于山洪和泥石流的監測和預測至關重要。然而,由于復雜微物理過程中許多影響因素的非線性相互作用,獲得這種QPE一直是一個挑戰。
2.3 多源降水融合技術的改進
眾多的降水產品各有優劣,將其融合集各家之長是如今多源降水融合發展的趨勢。如何將衛星反演降水產品、雷達QPE產品、站點觀測降水和模式降水有效且合理的組合在一起,一直是研究的重點。
Steven等[42]是以訂正后的雷達QPE產品為主,再以分別計算權重的方式,將多源數據融合起來。因為以雷達QPE產品為主,因此對該產品的質量要求也較高,權重計算也根據地形、降水類型等做了詳細的歸類和說明。降雨/無雨誤差是區域和全球降水產品不確定性的一個關鍵來源,這些產品會離線傳播到水文和地面模擬模擬中。因此Song等[43]針對有雨/無雨降水表達準確度,提出采用一種加權融合算法(CTC-M)實現三種相互獨立、互不相關的降水產品的融合,通過將各數據源降水數據轉化為二進制數據再進行融合的方式,進一步提高準確度。Kotsuki等[44]則根據降水評分來計算權重,進而將基于外推的臨近預報和數值天氣預報產品相融合,得到全球降水預報產品。作者認為在區域范圍內通常采用空間均勻的權重,而對于全球范圍,最佳權重在空間上或有不同,進而引入了空間上局地的評分用以優化空間權重。以加權的方式同時融合多源降水資料也是當下使用較多的方式,更多的區別在于如何合理計算權重。
國家氣象信息中心引進美國NOAA和CPC的“概率密度函數(PDF)+最優插值(OI)”兩步融合法實現了衛星資料與地面觀測資料的融合,之后引入貝葉斯模式平均方法,加入了雷達資料,實現了三源降水融合。
多源降水融合還有很多未解決的問題,該項技術也有待進一步地改進和發展,在未來,是否有更多方法例如同化方法等用于多源數據融合技術,也需要更深入的研究。
3 總結與展望
IMERG、GSMaP和Q3產品基于先進的算法和技術,成為全球或區域高分辨率降水融合產品中的主流。IMERG產品具有較高的時空分辨率,且覆蓋范圍從60°N—60°S擴展到全球,在完善數據覆蓋區域的同時也因為網格扭曲引入了誤差,需要考慮更公平的網格遷移方案。此外,在地形降水方面,該產品也有待研究。GSMaP產品采用了較成熟的降水反演算法、雨量計觀測調整算法等方法,且針對地形/非地形降水也有合理的分類方案。目前該產品的覆蓋范圍為60°N—60°S。MRMS的Q3產品是美國主流的區域高分辨率降水實況產品,完善的降水類型分類技術和各種降水率估算技術使其具有較高的產品質量,在對雙偏振雷達數據的使用方面,一直是該產品不斷改進和攻克的重點。
這些國際的主流多源融合降水產品各有優劣,其中的許多關鍵技術對于我國進一步發展自己的降水融合產品有重要的啟示作用。第一,在衛星融合降水方面,信息中心基于CMORPH產品,采用基于紅外冷云移動矢量的微波降水時空內插技術,實現了以時間位移長度為權重系數的多衛星集成。雖然已經有一定的研究基礎,但是在紅外和微波的反演技術方面,仍是空白,初始的衛星反演降水產品依然需要依賴美國、日本等最新產品。因此,在衛星反演降水方面,還需要從基礎的反演算法入手,生產我國自己的衛星反演降水產品,擺脫對國外產品的依賴。第二,美國利用長序列雷達QPE數據進行平均場偏差訂正,降低不同雷達間不一致性問題,并利用局地偏差訂正技術解決由于波束阻擋、異常傳播、零度層亮帶等引起的局部偏差問題。但是目前,我國還沒有時間上均一的長序列、全國組網的雷達QPE歷史產品。對該產品的研制也需提上日程;對于雷達組網的困難和降水相態識別問題也可參考MRMS系統,一方面實現對雷達的更新換代,便于采用類似無縫混合掃描反射率生成技術這類方法實現雷達組網,另一方面逐步引入雙偏振雷達,提高對降水相態識別的準確率。第三,對于山區降水,首先可以參考MRMS系統針對山區地形的坡度變化針對性計算QPE產品;其次可以借鑒GSMaP產品將山區降水與地形合理融合的關鍵技術;最后從科研角度,還可以引入模式數據,通過權重系數融合多種數據,緩解山區地區觀測稀疏等帶來的問題。
精細化的實況產品為智能網格預報業務提供了有力的實況數據支撐,同時還能反作用于上游的觀測環節。實況分析站在總覽全局的角度可以使“污染”觀測顯露原形,從而幫助觀測系統改善數據質量。多源融合的實況產品能夠大大提升衛星、雷達觀測數據的利用率,深入挖掘這些實時觀測數據的價值,與常規觀測相結合,得到連續的、高時空分辨率的實況產品數據。中國區域實況產品對捕捉以強對流天氣為代表的小尺度災害性天氣動向意義重大,使公路交通氣象預報、山洪地質災害預警、基于位置天氣實況查詢等更加精準、更加可靠。天氣實況是全球的剛需,目前CMORPH、MRMS等已經是公認的高質量降水實況產品。在中國區域,或者也將利用風云衛星等中國特色資料,針對中國的天氣氣候特征,在現有多源融合降水實況產品的基礎上,制作出更高時效和分辨率的降水實況產品。
未來現代化氣象業務的需求對降水產品的時效和分辨率要求越來越高,我國對高質量降水實況業務產品、災害天氣監測預警、高頻次滾動更新的智能預報、智慧氣象服務業務的需求也越來越緊迫,在積極解決上述問題的同時,也要開拓思維,并不局限于傳統的融合方法,在借鑒國際先進技術和經驗的基礎上,可以嘗試同化技術或神經網絡等機器學習方法的研究與應用。
猜你喜歡
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
Coco薇(2015年1期)2015-08-13 02:23:50
玩具(2009年10期)2009-11-04 02:33:14