一種基于Star算法的多路視頻穩(wěn)像方法研究
2023-01-29 08:55:10王棟梁徐嘯康白宏陽郭宏偉
遙測遙控 2023年1期
關(guān)鍵詞:特征
王棟梁,徐嘯康,白宏陽,郭宏偉
(1 中國兵器工業(yè)試驗(yàn)測試研究院 華陰 714200;2 南京理工大學(xué)能源與動(dòng)力工程學(xué)院 南京 210094)
引言
隨著科技的進(jìn)步,現(xiàn)代化戰(zhàn)爭逐漸向著信息化、智能化方向發(fā)展,其中制導(dǎo)武器的發(fā)展極為迅速。制導(dǎo)武器因其在戰(zhàn)場上能夠?qū)崿F(xiàn)自主、高效費(fèi)比地精準(zhǔn)打擊而在戰(zhàn)場上扮演的角色越來越重要。在圖像導(dǎo)引頭中捷聯(lián)式導(dǎo)引頭與框架式導(dǎo)引頭相比,有著抗過載、體積小、成本低等優(yōu)勢[1]。但捷聯(lián)式圖像導(dǎo)引頭具備這些優(yōu)勢的同時(shí)也因?qū)б^與彈體固連的結(jié)構(gòu)導(dǎo)致圖像導(dǎo)引頭獲取的目標(biāo)視頻會隨著彈體擾動(dòng)而產(chǎn)生抖動(dòng),嚴(yán)重影響了后續(xù)的目標(biāo)跟蹤檢測精度。此外,在實(shí)際應(yīng)用中發(fā)現(xiàn)單目圖像導(dǎo)引頭存在視野窄等弊端。借鑒仿生學(xué)原理,多路復(fù)眼圖像導(dǎo)引頭通過多路光學(xué)設(shè)計(jì),可實(shí)現(xiàn)大視場并行探測,同時(shí)又不需要框架平臺,成本低。抗過載能力強(qiáng),近幾年備受國內(nèi)外研究學(xué)者的關(guān)注。由于無穩(wěn)定平臺,解決捷聯(lián)式復(fù)眼導(dǎo)引頭的多路視頻抖動(dòng)的穩(wěn)像技術(shù)是復(fù)眼導(dǎo)引頭形成裝備需要突破的關(guān)鍵技術(shù)之一。
通常視頻穩(wěn)像技術(shù)可分為機(jī)械式穩(wěn)像、光學(xué)穩(wěn)像和電子穩(wěn)像技術(shù)三類[2]。機(jī)械式穩(wěn)像技術(shù)是最早被應(yīng)用的穩(wěn)像技術(shù),通常需要陀螺穩(wěn)定平臺衰減低頻震動(dòng)或采用減震裝置來隔離載體的抖動(dòng)來實(shí)現(xiàn)穩(wěn)像。光學(xué)穩(wěn)像是通過采用光穩(wěn)元件實(shí)現(xiàn),當(dāng)儀器受到載體擾動(dòng),穩(wěn)像元件能夠借助慣性穩(wěn)定機(jī)構(gòu)保持穩(wěn)定不動(dòng),滿足穩(wěn)像要求。相比上述兩種方法,電子穩(wěn)像技術(shù)則采用純數(shù)字圖像處理的方法,具備成本低、精度高、速度快等優(yōu)點(diǎn),成為穩(wěn)像技術(shù)的重要研究方向,也更適用于解決捷聯(lián)式圖像導(dǎo)引頭存在的視頻抖動(dòng)問題。
1 特征點(diǎn)提取算法
傳統(tǒng)電子穩(wěn)像主要分為3 個(gè)步驟:運(yùn)動(dòng)估計(jì)、運(yùn)動(dòng)補(bǔ)償、圖像修補(bǔ)[3]。其中運(yùn)動(dòng)估計(jì)步驟最為重要,運(yùn)動(dòng)參數(shù)估計(jì)的準(zhǔn)確與否很大程度地決定了后續(xù)視頻穩(wěn)像的質(zhì)量。目前主流的運(yùn)動(dòng)參數(shù)估計(jì)方法有塊匹配法、灰度投影法以及特征點(diǎn)匹配法[4,5]。塊匹配法對選取塊的尺寸大小十分敏感,灰度投影法在灰度信息單一的場景中處理效果較差,且這兩種方法易受背景影響,多應(yīng)用于只有平移運(yùn)動(dòng)的參數(shù)估計(jì),而基于特征點(diǎn)匹配的方法對平轉(zhuǎn)、旋轉(zhuǎn)以及縮放等變化場景皆有較好的估計(jì)效果[6]。
常用的特征點(diǎn)檢測方法主要有:SIFT(Scale Invariant Feature Transform,尺度不變特征變換)算法、SURF(Speed-Up Robust Feature,加速魯棒特征提取)算法、FAST(Features from Accelerated Seg?ment Test,角點(diǎn)檢測)算法等。2004 年,SIFT 算法被D.Lowe[7]提出,該算法利用高斯差分算子結(jié)合梯度直方圖完成特征的描述,具有尺度、旋轉(zhuǎn)、光照以及平移等多方面的不變性,隨即用于電子穩(wěn)像算法中特征點(diǎn)的提取,但是計(jì)算量大。2006年,Bay 等人[8]針對SIFT 算法在初始特征篩選步驟太過耗時(shí)的缺陷,提出了SURF算法,其利用積分圖像提升了計(jì)算效率,比SIFT 算法快近3 倍,不足之處是會增加誤匹配率。2006年,E.Rosten和T.Drummond[9]提出了一種簡單快速的特征點(diǎn)檢測方法,并在2010 年稍作修改發(fā)表了FAST。FAST 特征點(diǎn)檢測算法通過像素點(diǎn)之間像素值的比較從而確定特征點(diǎn)的位置,也正因此被認(rèn)為是最快的特征點(diǎn)檢測算法,然而它不具備圖像尺度不變性。M.Agrawal 等 人[10]提 出 了CenSurE(Center Sur‐round Extremas,中心環(huán)繞極值)特征提取方法,采用了雙層濾波器來近似高斯拉普拉斯算子,大大減少了計(jì)算時(shí)間,然而由于其使用的是方型濾波器,在應(yīng)對旋轉(zhuǎn)45o時(shí)性能較差。針對這個(gè)缺點(diǎn),Star 特征提取算法[11],采用星型濾波器,由方形濾波器與旋轉(zhuǎn)45o后的方形濾波器組合而成。主要分為以下三個(gè)步驟:
①使用雙層濾波器構(gòu)建尺度空間
CenSurE 構(gòu)建尺度空間時(shí)采用簡單的雙層濾波器來近似高斯拉普拉斯。圖1 所示為方型濾波器,又稱CenSurE-DOB。CenSurE-DOB 濾波器的內(nèi)核尺寸為(2n+1)×(2n+1),外核尺寸為(4n+1)×(4n+1)。設(shè)In為內(nèi)核權(quán)重系數(shù),On為外核權(quán)重系數(shù)。為了使這種濾波器的DC 響應(yīng)為0,權(quán)重系數(shù)需滿足等式:

圖1 方型濾波器Fig.1 CenSurE-DOB

對尺度進(jìn)行歸一化:

星型濾波器,即CenSurE-star,由方型濾波器和一個(gè)45°旋轉(zhuǎn)的方型濾波器組合而成,如圖2 所示。每個(gè)像素點(diǎn)的中心環(huán)繞哈爾小波響應(yīng)值也由原始積分圖像和45°旋轉(zhuǎn)積分圖像疊加得到。CenSurE-star 生成尺度空間時(shí)采用7 個(gè)尺度,檢測子是在每一個(gè)像素上將濾波器與影像進(jìn)行卷積運(yùn)算,并利用積分圖像加速運(yùn)算進(jìn)程,從而獲取該像素對應(yīng)尺度的空間值,循環(huán)計(jì)算各尺度便可得到近似的LoG空間。

圖2 星型濾波器Fig.2 CenSurE-star
②檢測局部極值點(diǎn)
采用非極大值抑制的方法檢測尺度空間極值點(diǎn)作為候選特征點(diǎn)。將尺度空間每個(gè)像素點(diǎn)與本尺度層的8 個(gè)鄰域點(diǎn)和上下相鄰兩尺度層的18 個(gè)鄰域點(diǎn)進(jìn)行響應(yīng)值比較,濾除小于設(shè)定閾值的極值點(diǎn)。
③濾除邊緣上的不穩(wěn)定點(diǎn)
采用尺度適應(yīng)的Harris 方法計(jì)算主曲率[12],表達(dá)式為:
式中:Lx、Ly為響應(yīng)函數(shù)L在x和y方向的偏導(dǎo),通過計(jì)算Ha的跡和行列式即可計(jì)算出相應(yīng)的主曲率,主曲率閾值設(shè)為10。濾除大于閾值的候選點(diǎn),即剔除邊緣響應(yīng),剩余的候選點(diǎn)即為包含了位置和尺度信息的CenSurE-star特征點(diǎn)。
Star特征提取算法不僅提供了尺度不變性,且穩(wěn)定性好、計(jì)算效率高。本文基于Star算法,設(shè)計(jì)了Star與光流法結(jié)合的特征提取算法,加快了前后幀特征點(diǎn)的提取速度,降低了特征點(diǎn)的誤匹配率;同時(shí)針對多路抖動(dòng)視頻產(chǎn)生的并行穩(wěn)像問題,利用了并行開發(fā)庫的并行處理思路,提出了先對圖像進(jìn)行分塊,后對圖像塊并行提取特征點(diǎn)的解決措施,大幅度減少了穩(wěn)像耗時(shí)。
2 單路穩(wěn)像算法設(shè)計(jì)
2.1 運(yùn)動(dòng)估計(jì)
運(yùn)動(dòng)估計(jì)模塊首先對待處理的抖動(dòng)視頻提取連續(xù)兩幀圖像,灰度化處理完提取幀,改進(jìn)后的特征點(diǎn)提取算法選取了Star算法提取當(dāng)前幀的特征點(diǎn),記做(xi,yi),然后利用金字塔光流法預(yù)測下一幀對應(yīng)的特征點(diǎn)(xi',yi')。金字塔光流法的原理主要是:首先對相鄰兩幀圖像進(jìn)行分層(方便理解,假設(shè)為3層)處理,然后計(jì)算當(dāng)前幀已提取的特征點(diǎn)U0在各個(gè)層中的對應(yīng)的點(diǎn)U1、U2和U3,接著從金字塔最高層開始,以U3作為下一幀中最高層的初始點(diǎn)V3計(jì)算當(dāng)前最高層中的最小誤差點(diǎn)V'3以及得到相應(yīng)的光流,再由計(jì)算出來的光流找到下一幀中第二層的V2作為初始點(diǎn),經(jīng)過相似計(jì)算后得到第二層的最小誤差點(diǎn)V'2,以此類推最終得到第0層的最小誤差點(diǎn)V'0,即特征點(diǎn)U0在下一幀中對應(yīng)的特征點(diǎn)。
如圖3所示,金字塔光流法利用了當(dāng)前幀已提取出來的特征點(diǎn)信息去跟蹤預(yù)測下一幀對應(yīng)的特征點(diǎn),加快了特征點(diǎn)的提取速度,提升了特征點(diǎn)匹配的準(zhǔn)確率。
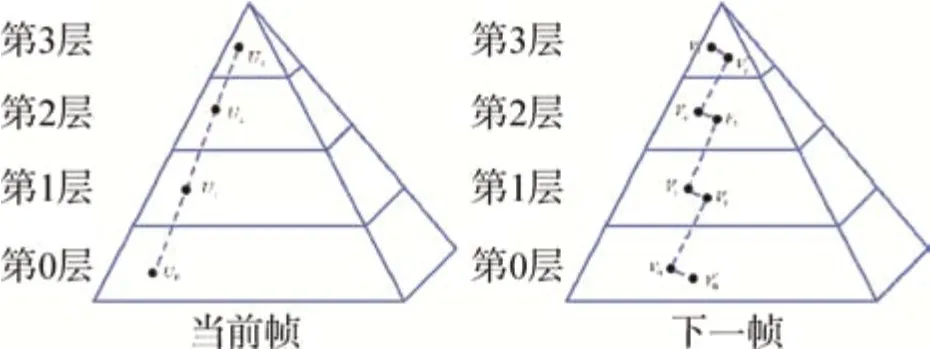
圖3 金字塔光流法原理圖Fig.3 Pyramid optical flow principle diagram
隨后,依據(jù)前后兩幀匹配特征點(diǎn)的位置(xi,yi)和,由計(jì)算公式(4)可得出前后兩幀圖像間的仿射變換矩陣H:

其中,H=,參數(shù)a11、a12、a21、a22表示視頻幀間的旋轉(zhuǎn)以及縮放部分,參數(shù)a13和a23則表示視頻幀間的平移運(yùn)動(dòng)。上述運(yùn)動(dòng)估計(jì)步驟具體流程如圖4所示。

圖4 改進(jìn)后的運(yùn)動(dòng)參數(shù)估計(jì)步驟流程圖Fig.4 Flow chart of improved motion parameter estimation steps
2.2 運(yùn)動(dòng)平滑
相機(jī)在拍攝過程中,相機(jī)的運(yùn)動(dòng)矢量通常由主觀運(yùn)動(dòng)矢量和隨機(jī)抖動(dòng)矢量結(jié)合而成,運(yùn)動(dòng)平滑步驟則需要濾除隨機(jī)抖動(dòng)矢量,保留相機(jī)的主觀運(yùn)動(dòng)矢量,使得穩(wěn)像后的視頻流運(yùn)動(dòng)軌跡平滑,以提升視頻穩(wěn)像效果。
Kalman濾波器是常用的濾波器之一,它采取預(yù)測值加上觀測值的方法來計(jì)算當(dāng)前時(shí)刻的估計(jì)值。本文采取Kalman濾波器對上述求出的運(yùn)動(dòng)參數(shù)做濾波平滑處理[13,14]。預(yù)測模型的具體計(jì)算公式為:

上式中,X(t|t-1)為第t幀對應(yīng)狀態(tài)預(yù)測量,X(t-1|t-1)為第t-1 幀對應(yīng)狀態(tài)的最優(yōu)估計(jì)值,P(t|t-1)為第t幀對應(yīng)的狀態(tài)協(xié)方差矩陣,F(xiàn)為系統(tǒng)轉(zhuǎn)移矩陣,Q為預(yù)測噪聲的方差陣。
Kalman濾波器的更新模型具體計(jì)算公式為:
上式中,M(t)為第t幀的Kalman 增益,Z(t)為觀測矩陣,I為單位矩陣,R為測量噪聲的協(xié)方差,P(t|t)為濾波后的協(xié)方差,H為均方誤差。
2.3 運(yùn)動(dòng)補(bǔ)償
根據(jù)已分離出來的抖動(dòng)分量對圖像進(jìn)行補(bǔ)償。首先,計(jì)算相鄰兩幀之間的運(yùn)動(dòng)矢量?Vk,累加得到當(dāng)前幀圖像的絕對運(yùn)動(dòng)矢量Sk,得到每一幀圖像的絕對運(yùn)動(dòng)矢量Sk后,對Sk做平滑濾波,得到平滑后的絕對運(yùn)動(dòng)矢量Sk',則Sk'-Sk就是每一幀圖像的補(bǔ)償運(yùn)動(dòng)矢量,然后,加上補(bǔ)償運(yùn)動(dòng)矢量后的圖像序列,則可得到最終穩(wěn)像后的視頻。
3 多路視頻的并行穩(wěn)像及加速方法設(shè)計(jì)
由于單目導(dǎo)引頭的視場受限,彈體在實(shí)際飛行中需要采用多目導(dǎo)引頭,亦稱復(fù)眼導(dǎo)引頭,以提供一個(gè)更廣闊的視野。然而復(fù)眼導(dǎo)引頭受彈體抖動(dòng)的影響也隨多目的數(shù)量被放大,由于多路視頻的同時(shí)輸入,對彈載處理器資源造成了一定的壓力,多路抖動(dòng)視頻存在實(shí)時(shí)數(shù)字穩(wěn)像的困難。
3.1 并行開發(fā)庫
目前對于圖像處理程序的并行化處理主要通過硬件和軟件兩個(gè)方面去實(shí)現(xiàn)。硬件方面主要是通過GPU、DSP、Intel多核處理器等多核平臺進(jìn)行加速,軟件方面主要是利用并行化庫對軟件程序進(jìn)行并行改造。當(dāng)前常用的并行化庫有MPI(Message Passing Interface,消息傳遞并行編程環(huán)境)和OpenMP(Open Multi-Processing,共享存儲并行編程)。MPI在并行規(guī)模上伸縮性很強(qiáng),適用于個(gè)人電腦以及超級計(jì)算機(jī),但缺點(diǎn)是編程麻煩且并行效率低、內(nèi)存開銷大;OpenMP 是一套共享存儲方式并行程序接口,采用Fork-Join 模型來實(shí)現(xiàn)程序的并行化,無需再進(jìn)行復(fù)雜的線程創(chuàng)建、同步、負(fù)載平衡和銷毀工作,應(yīng)用到多核結(jié)構(gòu)上并行效率高、內(nèi)存開銷小,因此可利用OpenMP并行開發(fā)庫對多路輸入視頻進(jìn)行并行化穩(wěn)像處理。
3.2 并行加速處理
針對穩(wěn)像算法中耗時(shí)較多的步驟:運(yùn)動(dòng)估計(jì)以及運(yùn)動(dòng)濾波,設(shè)計(jì)改進(jìn)后的并行穩(wěn)像算法步驟流程圖如圖5所示:

圖5 并行穩(wěn)像算法步驟流程圖Fig.5 Parallel video stabilization algorithm step
第一步:對輸入的多路視頻進(jìn)行幀緩沖、循環(huán)提取連續(xù)兩幀圖像以及完成圖像灰度化預(yù)處理;
第二步:基于并行化庫OpenMP對預(yù)處理完后的當(dāng)前幀先分塊再并行提取各圖像塊特征點(diǎn),完成當(dāng)前幀特征點(diǎn)的提取后進(jìn)而并行采用光流法跟蹤提取下一幀的特征點(diǎn);
第三步:對前后幀匹配的特征點(diǎn),并行計(jì)算出各自對應(yīng)的仿射變換矩陣H1、H2……Hi(i=1,2......n);
第四步:對上述通過仿射變換求出來的運(yùn)動(dòng)矢量,采用卡爾曼濾波器并行濾波,濾除各路的隨機(jī)抖動(dòng)矢量[15];
第五步:為各路濾波后的運(yùn)動(dòng)矢量計(jì)算對應(yīng)的補(bǔ)償運(yùn)動(dòng)矢量,各路圖像序列加上補(bǔ)償運(yùn)動(dòng)矢量,完成視頻穩(wěn)像。
具體并行化處理程序示例如下:
#pragma omp parallel sections
#pragma omp section
{第1路當(dāng)前幀特征點(diǎn)提取}
#pragma omp section
{第2路當(dāng)前幀特征點(diǎn)提取}
……
#pragma omp section
{第n路當(dāng)前幀特征點(diǎn)提取}
其中OpenMP 指導(dǎo)語句“#pragma omp parallel sections”用來明確開啟多線程的起始點(diǎn),指導(dǎo)語句“#pragma omp section”用來明確子線程的起始點(diǎn)。
4 實(shí)驗(yàn)與分析
4.1 實(shí)驗(yàn)設(shè)置
本文最終選取了兩種平臺進(jìn)行所設(shè)計(jì)算法性能的測試比較:PC 端與NVIDIA 的嵌入式開發(fā)板TX2,其中PC 端硬件配置如下:Intel(R) Core(TM) CPU i7-7700@3.60 GHz,16 G 內(nèi)存,操作系統(tǒng)為Windows 10。軟件平臺選取包含Opencv 庫(3.4.3 版本)的Visual Studio 2013。TX2 的配置如下:操作系統(tǒng)為Ubuntu 16.04,編譯器為GCC 6.1版本。抖動(dòng)視頻選取OTB100 數(shù)據(jù)集中的BlurCar系列作為輸入測試視頻。
4.2 評價(jià)指標(biāo)
幀間峰值信噪比PSNR 是廣泛用于評價(jià)電子穩(wěn)像效果的指標(biāo)之一,通過比較連續(xù)兩幀圖像之間像素值的變化,最終客觀、定量地評價(jià)穩(wěn)像算法的好壞。計(jì)算公式如下:

上式中EMSE為幀間均方差,W、H 分別為圖像長寬,I(x,y)為當(dāng)前幀點(diǎn)(x,y)處的像素值,I'(x,y)為下一幀點(diǎn)(x,y)處的像素值,Imax為當(dāng)前幀中圖像最大像素值。前后兩幀圖像之間RPSNR值越大,意味著視頻前后兩幀重合度越高,視頻穩(wěn)像效果越好。
4.3 單路穩(wěn)像效果比較
仿真測試視頻選取OTB 100 數(shù)據(jù)集中的Blur系列視頻以及外場試驗(yàn)拍攝的旋轉(zhuǎn)抖動(dòng)視頻。本文選取近幾年的穩(wěn)像算法進(jìn)行比較,分別是酒銳波等人[16]的基于FAST-9 角點(diǎn)檢測與光流法結(jié)合的穩(wěn)像算法和曾強(qiáng)等人[17]的基于SURF 特征提取算法加 上BRIEF(Binary Robust Independent Elemen‐tary Features,二進(jìn)制特征描述)運(yùn)動(dòng)估計(jì)的穩(wěn)像算法。
圖6、圖7 為上述方法在復(fù)雜車輛抖動(dòng)場景、旋轉(zhuǎn)抖動(dòng)場景下的兩種抖動(dòng)視頻中提取的特征點(diǎn)以及前后幀特征點(diǎn)匹配的效果圖。

圖6 場景1算法特征點(diǎn)匹配圖對比Fig.6 Scene 1 feature point matching map comparison

圖7 場景2算法特征點(diǎn)匹配圖對比Fig.7 Scene 2 feature point matching map comparison
觀察在上述不同場景下的特征點(diǎn)提取以及匹配效果圖,可以發(fā)現(xiàn),對當(dāng)前幀提取特征點(diǎn)后,F(xiàn)AST-9 算法提取得到的特征點(diǎn)呈現(xiàn)聚簇的現(xiàn)象,而SURF 算法與Star 算法提取到的特征點(diǎn)較均勻。隨后用光流法跟蹤提取下一幀相應(yīng)的特征點(diǎn),使用BRIEF 對三種算法提取到的前后幀特征點(diǎn)進(jìn)行特征描述進(jìn)而進(jìn)行特征點(diǎn)匹配。在特征點(diǎn)匹配圖中,近乎水平的直線表明前后幀特征點(diǎn)獲得了準(zhǔn)確的匹配,再觀察可知,F(xiàn)AST-9 算法與SURF 算法在場景1中均存在數(shù)量較多的誤匹配點(diǎn),而改進(jìn)后的Star算法近乎沒有誤匹配點(diǎn),針對旋轉(zhuǎn)變化大的場景2,F(xiàn)AST-9 算法與SURF 算法的準(zhǔn)確匹配率急劇下降,而改進(jìn)后的Star算法依舊保持較高的準(zhǔn)確匹配率。綜上2種典型場景下的特征點(diǎn)匹配效果圖,可以看出改進(jìn)后的Star 算法相比另外兩種算法,可以更好地適應(yīng)各種復(fù)雜背景下的特征點(diǎn)提取與匹配。
三種算法針對上述提到的BlurCar 系列視頻在PC 端以及TX2 兩種平臺下的具體穩(wěn)像參數(shù)對比如圖8以及表1所示。
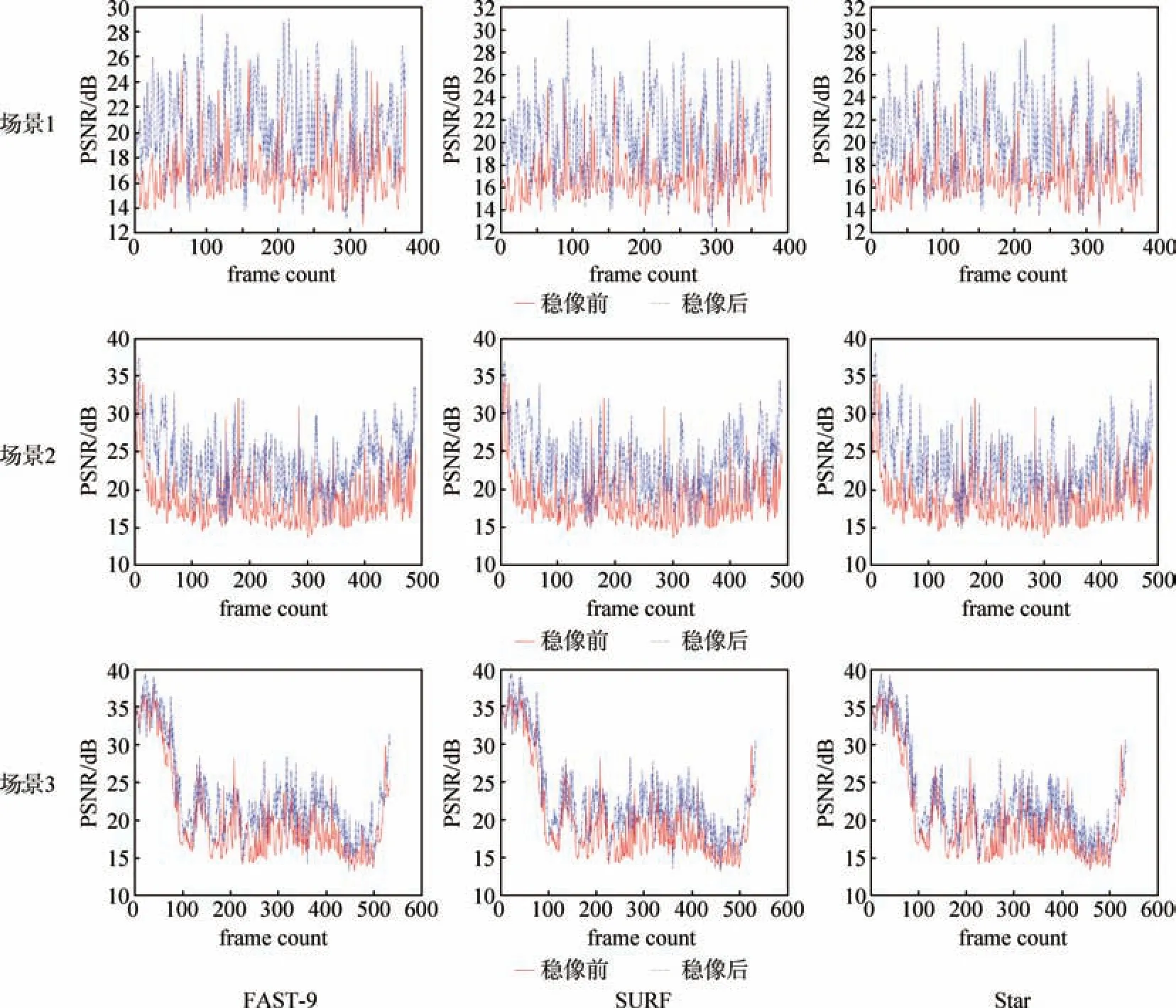
圖8 各場景下各算法穩(wěn)像后提升PSNR對比Fig.8 Comparison of improved PSNR after image stabilization in various scenes
由表1 可以看出,本文算法穩(wěn)像后的視頻在PSNR 提升方面略優(yōu)于另外兩種算法,在PC 端以及TX2 平臺下穩(wěn)像速度方面則有著明顯優(yōu)勢,能夠較好地滿足實(shí)時(shí)穩(wěn)像的需求。
4.4 并行穩(wěn)像速度分析
為了定量對比串行與并行的穩(wěn)像速度,本文選擇輸入同一抖動(dòng)視頻BlurCar2。鑒于創(chuàng)建多線程的過程也會耗費(fèi)時(shí)間,因此分別選取2 路、4 路和8 路同時(shí)輸入的情況作為串、并行穩(wěn)像耗時(shí)比較。完成對整個(gè)抖動(dòng)視頻的穩(wěn)像操作后,再由已知的視頻幀數(shù)求出平均每幀穩(wěn)像耗時(shí)。兩種平臺下的具體耗時(shí)對比如下表2所示:

表2 串、并行穩(wěn)像速度對比Table 2 Serial and parallel image stabilization speed comparison
由表1 觀察可知:在PC 平臺下,多路視頻輸入的情況中,并行穩(wěn)像的平均每幀耗時(shí)比串行穩(wěn)像耗時(shí)依次減少了56.57%、59.64%和54.36%。相應(yīng)的在TX2 平臺下,并行穩(wěn)像的耗時(shí)也同樣減少了34.26%、29.76%和27.74%。綜上可見,改進(jìn)后的穩(wěn)像算法在應(yīng)對多路抖動(dòng)視頻的穩(wěn)像問題上,極大程度減少了穩(wěn)像步驟的耗時(shí),能夠較好地滿足多路實(shí)時(shí)穩(wěn)像的要求。
5 結(jié)束語
本文對電子穩(wěn)像算法中運(yùn)動(dòng)估計(jì)模塊進(jìn)行了研究,基于Star特征點(diǎn)提取算法,采用光流法跟蹤預(yù)測下一幀特征點(diǎn),以BRIEF 二進(jìn)制特征描述算法描述特征點(diǎn),實(shí)現(xiàn)了圖像幀間的運(yùn)動(dòng)估計(jì),最終完成了單路視頻的穩(wěn)像。在此基礎(chǔ)上,采用OpenMP 并行開發(fā)庫對穩(wěn)像算法進(jìn)行了并行改造,實(shí)現(xiàn)了多路輸入視頻的并行實(shí)時(shí)穩(wěn)像。最后,基于OTB100 數(shù)據(jù)集的BlurCar 系列視頻,本算法在PC 平臺下對4 路抖動(dòng)視頻并行穩(wěn)像的結(jié)果參數(shù)為:PSNR 平均提升4.62 dB,單幀耗時(shí)平均為14.51 ms。經(jīng)實(shí)驗(yàn)比較證實(shí),本文的多路視頻穩(wěn)像方法在速度以及穩(wěn)像效果上提升明顯,具有一定的實(shí)際應(yīng)用價(jià)值。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
